激光目標模擬器校準裝置研制
2021-10-14 05:54:08王俊朱小平毛宏宇翟樹峰張孟月徐鈺華
計測技術 2021年4期
關鍵詞:信號
王俊,朱小平,毛宏宇,翟樹峰,張孟月,徐鈺華
(北京航空工程技術研究中心,江蘇 南京 210028)
0 引言
激光目標模擬器是激光制導武器研制、生產及其后期維護檢修的重要測試儀器之一[1-10],廣泛應用于制導系統導引頭[11]的調試及測試。其主要功能是產生導引頭測試過程中與光學接收機相關的各種測試輸入信號,可以輸出標準模擬光脈沖信號、精確頻率編碼光脈沖信號、激光照射同步電脈沖信號等,并模擬不同峰值功率的光脈沖信號。在測試過程中,激光信號模擬光源要變換不同方位,每次都會帶來方位偏差,導致發射角也發生細微變化,長期使用后激光信號模擬光源的方位會較大幅度地偏離設計指標,需要對其進行校準測試。針對此需求,本文研制了激光目標模擬器校準裝置,實現對激光目標模擬器的檢定測試與計量保障。
1 激光目標模擬器原理分析
激光目標模擬器作用是將特定波長的帶編碼信息的光以特定方位照射到制導系統導引頭上[3-6],經過制導系統導引頭光學系統匯聚于接收探測器的特定區域內,由導引頭進行信號放大、解碼、和差運算等處理,輸出位置偏差信號,控制舵機做相應的動作,從而驗證武器系統的功能指標。
激光目標模擬器有A型、B型兩種,A型激光目標模擬器的光源光學原理如圖1所示。
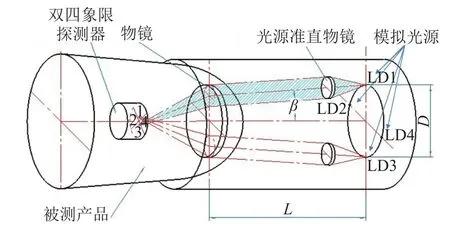
圖1 A型激光目標模擬器光源光學原理
模擬光源的四路發光點LD1,LD2,LD3,LD4,經準直鏡準直后,在固定距離L位置,以固定角度β角入射,確保各路入射光經導引頭匯聚后,光點分別落在探測器不同的區域(1,2,3,4)處,且互不干擾。A型激光目標模擬器通過分別控制四路光源,測試產品的響應特性。
B型激光目標模擬器的光源光學原理如圖2所示。模擬光源的四路具有一定發散角α的點光源LD1,LD2,LD3,LD4,發出錐形光束,使其中的一部分光束,在固定距離L位置,能夠入射到導引頭光學系統內,匯聚后,光點分別落在探測器的不同區域(1,2,3,4)處,且互不干擾。B型激光目標模擬器通過分別控制四路光源,測試產品的響應特性。

圖2 B型激光目標模擬器光源光學原理
當激光目標模擬器出現以下故障時,將導致測試系統不能正確評價武器系統的性能:
1)激光信號模擬光源本身制造定位不準確,或使用過程中操作不當導致定位不準確,導致光點不能夠落在正確的區域,光信號互相干擾,使被測產品不能按照設定程序產生正確的動作響應;
2)模擬光源本身出現發光強度不夠或不發光故障,導致被測產品無動作;
3)控制器編碼序列與導引頭解碼不匹配,激光信號錯誤,導引頭無解碼輸出信號或輸出信號錯誤,導致被測產品無動作或錯誤動作。
2 方案設計
激光目標模擬器檢定裝置要實現對A,B型激光目標模擬器的激光信號模擬光源的能量中心點方位、發射角、發光功率等參數的精確測試,完成對四路激光信號脈沖特性以及探測器邏輯輸出的功能測試。
2.1 硬件設計
激光目標模擬器校準裝置硬件由殼體雙四象限探測器、二維程控系統、虛擬示波器、計算機控制系統、24 V開關電源、測試電纜、光源觸發控制盒專用夾具等部件組成,裝置整體外觀示意圖見圖3。
雙四象限探測器用于接收激光信號,并將接收到的激光信號轉換成電信號。探測器單色靈敏度(λ=1.06μm)≥2.5×104V/W。
二維程控系統包含運動控制卡、二維平移臺、電機驅動器以及電機,其中運動控制卡采用雷賽運動控制卡DMC4420,該運動控制卡基于PC104總線、可控制四個步進或伺服電機,最高脈沖頻率400 kHz,具有S形曲線速度控制、隨時變速等高級功能,滿足激光目標模擬器校準裝置在垂直于光軸的固定距離上X,Y兩個方向程控要求。二維平移臺用于移動雙四象限探測器,電機驅動,探測器在二維平移臺上運動,二維平移臺的X,Y方向分別由電機驅動,行程為100 mm,直線定位誤差為±0.05 mm。步進電機驅動器用于控制二維平移臺,通過指令使其按照技術要求運行。
虛擬示波器用于將電壓信號轉換成數字量,并在計算機圖形界面上以波形的形式顯示。虛擬示波器采用荷蘭產HS4便攜式綜合測試儀,該示波器是4通道,12位、50 MS/s采樣率數字示波器,準確度為0.2%±1 LSB,用于采集探測器的4路脈沖信號。
計算機系統用于運行控制軟件;24 V開關電源用于將220 V交流電轉換成24 V直流電,給計算機系統和步進電機供電;光源觸發控制盒用于產生脈沖信號,給激光目標模擬器提供觸發源。
2.2 軟件設計
激光目標模擬器校準裝置的軟件主要包括程序界面、運動控制、數據采集與分析、數據存儲與圖形顯示等模塊。其功能主要是實現二維程控運動,數據采集、存儲與數據分析,以及圖像界面的顯示。
1)程序界面模塊
進入軟件界面,首先是被測光源類型選擇界面,按照被測光源類型,選擇對應光源類型后進入測試界面。通常情況下,首先進行邏輯輸出測試,如圖4所示。

圖4 邏輯測試界面
如果邏輯輸出不通過,說明光源存在故障,排除故障后,再進行分布測試,進入分布測試界面,如圖5所示。分布測試包含了最大能量中心位置、信號幅度、發散角等信息,根據測試結果可以判斷各路光源的狀態。

圖5 分布測試界面
2)二維運動控制模塊
二維運動控制由計算機發出控制指令,驅動電機帶動專用探測器,在平面內進行掃描,采集數據,獲得關于X,Y坐標對應的信號采樣數據矩陣。二維運動控制采用伺服控制卡的庫函數指令,能夠精確定位探測器,并有限位保護功能,防止超行程運動。
3)數據采集與分析模塊
數據采集要保證其數據的實時性,數字示波器采用硬件數據存儲,通過USB接口傳輸至計算機,采集每個脈沖的全波形數據,利用數學矩陣模型,建立空間分布數據矩陣。
4)數據存儲與圖形顯示模塊
對于每個編號的模擬光源,建立一個數據文件,獨立存儲存檔,需要時可以調出查詢,以三維空間圖的形式顯示,可以直觀地觀察到結果,同時,以窗口形式顯示相關參數。
3 激光目標模擬器的校準測試
激光目標模擬器是否合格,其核心因素就是模擬光源發出的光是否能夠分別準確落在探測器的特定區域內,并且不相互干擾。在光功率合適、編碼正確時,就能夠使被測激光導引頭按照設定的程序做準確的動作,激光目標模擬器檢定裝置的關鍵也是要檢測激光目標模擬器發光點的能量中心分布、光源發散角、發光功率等參數。通過測試激光目標模擬器的激光信號空間分布[12]以及探測器邏輯輸出信號可以完成對其校準測試。
將被測激光目標模擬器安裝于校準裝置夾具上,以與使用狀態相同的定位方式定位在校準裝置上,校準裝置通過兩個測試階段來驗證激光目標模擬器是否合格:
第一階段:探測器邏輯輸出信號測試
激光目標模擬器正常工作時,四象限探測器在特定位置探測激光目標模擬器不同位置發出的激光應有對應的邏輯輸出,依據這種正確的邏輯關系,可以判定激光目標模擬器的各發光點之間是否存在互相干擾等故障。
當激光目標模擬器正常時,探測器的邏輯輸出符合圖6所示的邏輯關系,否則,光源存在相互干擾,邏輯輸出混亂。
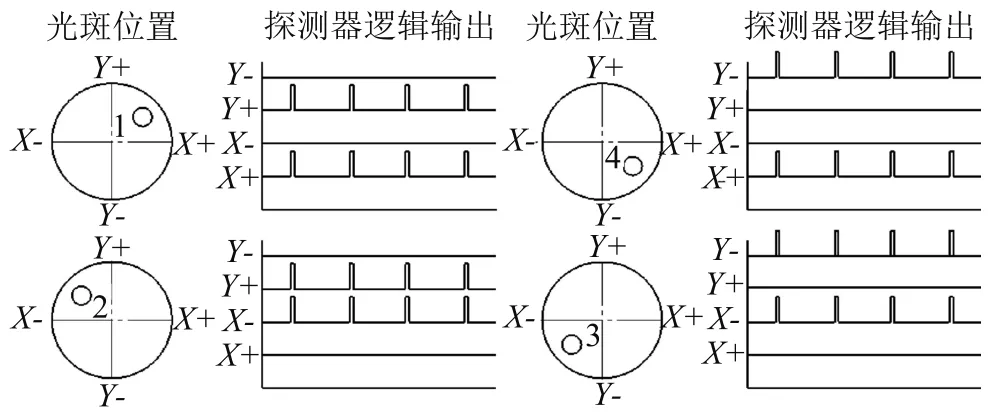
圖6 光源與探測器輸出對應關系圖
第二階段:激光信號空間分布測試
激光目標模擬器校準裝置的專用探測器安裝在具有X,Y兩個方向可程控移動的導軌上,在計算機的控制下,分別觸發激光目標模擬器的四個光點LD1,LD2,LD3,LD4產生光信號,探測器在垂直于光軸的固定距離上的平面內掃描采集,并生成信號,探測器電信號經過隔離、放大,經由數據采集系統獲得關于XY平面內的光信號幅度的空間分布數據。B型激光模擬器的四個發光點在X方向信號幅度輸出響應分布如圖7所示。
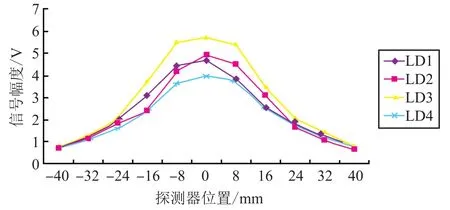
圖7 激光模擬器輸出響應曲線
如果沿X,Y兩個方向掃描采樣,可獲得如圖8所示的探測器在特定位置的空間分布輸出特性數據,該數據包含了模擬光源的能量中心位置、束散角、能量幅度等信息。
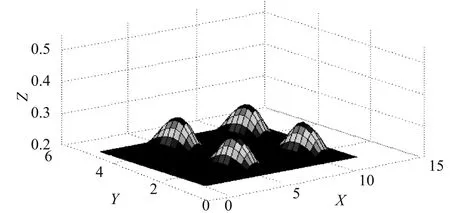
圖8 激光光源的空間分布模擬
4 結束語
研制了一種激光目標模擬器校準裝置,給出了軟硬件總體設計方案,基于該校準裝置對激光目標模擬器進行了校準測試。結果表明,該裝置可準確測量激光目標模擬器的激光信號模擬光源的方位、發射角、信號功率等參數,能夠滿足對于激光目標模擬器的檢定需求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
