離心-振動(dòng)復(fù)合校準(zhǔn)技術(shù)研究
2021-10-14 05:54:42董雪明王敏林
計(jì)測技術(shù) 2021年4期
關(guān)鍵詞:振動(dòng)
董雪明,王敏林
(航空工業(yè)北京長城計(jì)量測試技術(shù)研究所,北京 100095)
0 引言
隨著航空、航天工業(yè)的飛速進(jìn)步,對(duì)飛行器等運(yùn)載工具的性能要求越來越高,由于飛行環(huán)境復(fù)雜和技術(shù)現(xiàn)狀限制,現(xiàn)實(shí)需求與研究水平存在著很大的差距,例如火箭、導(dǎo)彈的發(fā)射會(huì)處在一種振動(dòng)[1-2];線加速度、陣風(fēng)、過載等同時(shí)作用的復(fù)雜動(dòng)態(tài)環(huán)境[3]中,這會(huì)影響飛行器導(dǎo)航系統(tǒng)的性能,造成精度下降、性能失效,甚至?xí)p壞。而過去受設(shè)備條件限制所進(jìn)行的可靠性、功能性、精度性測試試驗(yàn),嚴(yán)格地說是對(duì)某一項(xiàng)環(huán)境因素的單獨(dú)模擬檢驗(yàn),如振動(dòng)試驗(yàn)或過載試驗(yàn)等,很難綜合反映運(yùn)載工具飛行時(shí)的工作狀況,因此有必要研究建立一套離心-振動(dòng)復(fù)合加速度試驗(yàn)系統(tǒng),盡可能模擬真實(shí)的飛行環(huán)境,為研究相關(guān)的“天地一致性”[4]問題提供保障。
在離心-振動(dòng)復(fù)合加速度試驗(yàn)裝置的研制方面,國外早已開始進(jìn)行相關(guān)研究,并有用于環(huán)境試驗(yàn)的產(chǎn)品問世。例如,美國Sandia國家實(shí)驗(yàn)室研制的“8.84 m離心-振動(dòng)設(shè)備”[5-6]、美國Wyle實(shí)驗(yàn)室研制的“安裝單軸電磁振動(dòng)臺(tái)系統(tǒng)的離心機(jī)”[7]、法國Actidyn公司生產(chǎn)的離心-振動(dòng)產(chǎn)品,能夠?qū)崿F(xiàn)正弦振動(dòng)、隨機(jī)振動(dòng)、沖擊、多正弦和暫態(tài)多種振動(dòng)控制模式[8]。我國多參數(shù)復(fù)合校準(zhǔn)技術(shù)研究剛剛開始起步,中國工程物理研究院已經(jīng)研制出離心-振動(dòng)復(fù)合環(huán)境試驗(yàn)裝置[9],浙江大學(xué)從國外引進(jìn)了離心-振動(dòng)復(fù)合環(huán)境試驗(yàn)裝置[10]。綜上所述,國內(nèi)外目前的研究成果大多數(shù)用于可靠性試驗(yàn)的離心-振動(dòng)復(fù)合試驗(yàn)機(jī),沒有用于開展加速度計(jì)復(fù)合校準(zhǔn)的裝置。
為解決飛行器、火箭彈、水中兵器、無人機(jī)等領(lǐng)域慣性器件的“天地一致性”校準(zhǔn)有關(guān)難題,我所在2015年成功研制了離心-振動(dòng)復(fù)合校準(zhǔn)裝置。本文對(duì)此離心-振動(dòng)復(fù)合校準(zhǔn)裝置進(jìn)行詳細(xì)介紹,建立離心-振動(dòng)復(fù)合校準(zhǔn)模型,并分析離心-振動(dòng)復(fù)合下的動(dòng)不平衡影響。
1 標(biāo)定目的
目前,我國沒有任何用于復(fù)合環(huán)境下開展慣性器件計(jì)量校準(zhǔn)的裝置,這嚴(yán)重制約了軍工裝備慣性器件的研制和生產(chǎn)水平及能力的提升,影響和限制了武器裝備的打擊精度和使用壽命。因此,本文建立基于離心-振動(dòng)復(fù)合校準(zhǔn)裝置的校準(zhǔn)方法,模擬真實(shí)的加速度計(jì)校準(zhǔn)環(huán)境,以提高復(fù)合環(huán)境下加速度計(jì)的校準(zhǔn)精度。
2 標(biāo)定原理
2.1 離心-振動(dòng)復(fù)合校準(zhǔn)裝置系統(tǒng)中的動(dòng)不平衡問題研究
離心-振動(dòng)復(fù)合校準(zhǔn)裝置是以精密離心機(jī)為基礎(chǔ)平臺(tái),搭載電磁振動(dòng)臺(tái)構(gòu)成的多部件復(fù)合型慣性測試設(shè)備。此類設(shè)備存在的一個(gè)典型問題就是各個(gè)組成部件之間的相互影響[13],在離心-振動(dòng)復(fù)合校準(zhǔn)裝置系統(tǒng)中,由于被測單元及其工裝隨著振動(dòng)臺(tái)的活動(dòng)部件進(jìn)行周期性運(yùn)動(dòng),會(huì)引起離心機(jī)的動(dòng)不平衡問題。
動(dòng)不平衡問題是旋轉(zhuǎn)機(jī)械研究中的關(guān)鍵問題,主要是因?yàn)檗D(zhuǎn)子質(zhì)量分布不均引起的。嚴(yán)重的動(dòng)不平衡問題會(huì)導(dǎo)致轉(zhuǎn)軸和軸承之間產(chǎn)生振動(dòng),直接影響旋轉(zhuǎn)機(jī)械的工作效率和可靠性。
解決動(dòng)不平衡問題的基本思路是對(duì)失衡轉(zhuǎn)子進(jìn)行配重,使配重產(chǎn)生的離心力抵消轉(zhuǎn)子原有不平衡量產(chǎn)生的離心力;或者精確測出不平衡量的位置和大小,在相應(yīng)位置去掉不平衡質(zhì)量。一般情況下,以上兩種方法都能解決動(dòng)不平衡問題。但是,在離心-振動(dòng)復(fù)合校準(zhǔn)裝置系統(tǒng)中,以上兩種方法都不可行,因?yàn)樯鲜鰞煞N方法針對(duì)的動(dòng)不平衡量都是“靜止”的,即動(dòng)不平衡量的位置和數(shù)值不隨著時(shí)間變化,而離心-振動(dòng)復(fù)合校準(zhǔn)裝置系統(tǒng)中的動(dòng)不平衡量是“運(yùn)動(dòng)”的,即隨著振動(dòng)臺(tái)的運(yùn)動(dòng),該動(dòng)不平衡量將產(chǎn)生周期性的位置變化和數(shù)值變化。除非采用同步的動(dòng)態(tài)配重方法,否則不可能得到解決。這是一個(gè)特殊的新問題,就目前的研究而言,還沒有切實(shí)的解決措施。但是,我們可以通過分析,評(píng)估這種動(dòng)不平衡的影響,通過機(jī)械結(jié)構(gòu)的設(shè)計(jì)來削弱這種影響。
理論上,離心-振動(dòng)復(fù)合校準(zhǔn)裝置的動(dòng)不平衡問題在垂臂振動(dòng)情況下不存在,而在順臂振動(dòng)情況下最為顯著。下面針對(duì)離心-振動(dòng)復(fù)合校準(zhǔn)裝置順臂振動(dòng)情況下的動(dòng)不平衡問題進(jìn)行分析,評(píng)估其對(duì)離心-振動(dòng)復(fù)合校準(zhǔn)裝置輸出加速度的影響。首先對(duì)順臂振動(dòng)時(shí)的受力情況進(jìn)行分析,如圖1所示。振動(dòng)臺(tái)動(dòng)圈、夾具和被測單元(總稱為“活動(dòng)部件”)總質(zhì)量為m,簡化為質(zhì)心M。質(zhì)心靜止時(shí)距離離心機(jī)轉(zhuǎn)軸中心線距離為R。
圖1 順臂振動(dòng)受力示意圖
設(shè)質(zhì)心做線振動(dòng)運(yùn)動(dòng),且初相位為0,滿足方程

式中:x為系統(tǒng)狀態(tài);t為時(shí)間;h為振動(dòng)臺(tái)振幅;f為振動(dòng)頻率。則質(zhì)心距離離心機(jī)旋轉(zhuǎn)軸的距離為

質(zhì)心位置變化會(huì)造成離心機(jī)不平衡,相當(dāng)于離心機(jī)兩端質(zhì)量未配平的情況。為便于理解,這里定義一個(gè)位置固定在L,質(zhì)量為me的“等效偏載質(zhì)量”,滿足

根據(jù)公式(2)和(3),得到等效偏載質(zhì)量為

若設(shè)離心機(jī)轉(zhuǎn)速為Ωrad/s,則me受到慣性力(方向?yàn)檠仉x心機(jī)旋轉(zhuǎn)半徑方向向外)大小為

且受到的重力大小為

為便于分析,將me產(chǎn)生的慣性力和重力平移到距離心機(jī)旋轉(zhuǎn)主軸軸心Oz處。根據(jù)力的平移定理,作用在剛體上的力可平移到剛體任一點(diǎn),但必須同時(shí)附加一個(gè)力偶,其力偶矩是原力矩對(duì)于新作用點(diǎn)之力矩。設(shè)離心機(jī)旋轉(zhuǎn)主軸長度為2h,平移之后,me在Oz處除了受到大小相等、方向相同的慣性力與重力作用以外,還受到力矩的作用。將兩個(gè)力對(duì)應(yīng)的力矩合成,得到合力矩M

由動(dòng)不平衡產(chǎn)生的慣性力和慣性力矩,將使離心機(jī)的工作半徑變化。離心機(jī)受動(dòng)不平衡問題的影響如圖2所示。
圖2 離心機(jī)動(dòng)不平衡示意圖
因慣性力的作用,離心機(jī)旋轉(zhuǎn)軸線產(chǎn)生的徑向偏移量

式中:Kr為氣浮軸承的徑向剛度,N/m。力矩M使得主軸產(chǎn)生的主軸傾斜角為

式中:Kθ為氣浮軸承的角剛度,Nm/rad。重力作用于豎直方向,不對(duì)主軸徑向姿態(tài)產(chǎn)生影響。
若在質(zhì)心處安裝線加速度計(jì),線加速度計(jì)輸入軸與離心機(jī)臂平行。在不平衡狀態(tài)下工作的離心機(jī),其工作半徑變化量為

式中:ΔRr為由慣性力Fr作用引起的徑向偏移量;ΔRM為由力矩M作用引起的離心機(jī)主軸幾何軸線在加速度質(zhì)心所在平面上的位移量

式中:Δheo為偏載質(zhì)量質(zhì)心所在平面與O點(diǎn)的垂直距離,在安裝時(shí)確定。根據(jù)式(5)至式(10),可以得到動(dòng)不平衡對(duì)加速度計(jì)工作半徑的影響量為
根據(jù)公式(5),(6),(7)和公式(9),動(dòng)不平衡引起離心機(jī)主軸的俯仰失準(zhǔn)角為

離心-振動(dòng)復(fù)合校準(zhǔn)裝置的設(shè)計(jì)參數(shù)如表1所示。根據(jù)表1設(shè)計(jì)參數(shù),計(jì)算得到俯仰失準(zhǔn)角的最大值為
表1 離心-振動(dòng)復(fù)合校準(zhǔn)裝置設(shè)計(jì)參數(shù)

現(xiàn)有安裝工藝能夠保證圓盤與主軸軸線的不垂直誤差小于10″,約4.848×10-5rad。因此,在現(xiàn)有的離心-振動(dòng)復(fù)合校準(zhǔn)裝置配置下,動(dòng)不平衡引起的離心機(jī)主軸失準(zhǔn)角將被安裝誤差所掩蓋。
同樣根據(jù)表1設(shè)計(jì)參數(shù),計(jì)算得到動(dòng)不平衡對(duì)加速度計(jì)工作半徑的最大影響量為
這一影響量的數(shù)量級(jí)與離心機(jī)動(dòng)態(tài)半徑變化數(shù)量級(jí)相當(dāng),需要做進(jìn)一步分析。
理想情況下,離心機(jī)產(chǎn)生的加速度大小可以表示為

因?yàn)閯?dòng)不平衡的影響,離心機(jī)加速度的輸出變?yōu)?/p>

因此得到動(dòng)不平衡引起的離心機(jī)加速度相對(duì)誤差表達(dá)式為

根據(jù)公式(14)的估算,公式(13)表示的角度是小角度,因此,公式(12)中表示的ΔRd可以表示為
根據(jù)公式(1),(18)和公式(19)可知,動(dòng)不平衡引起的離心機(jī)加速度相對(duì)誤差表達(dá)式為
由公式(20)可知,當(dāng)離心-振動(dòng)復(fù)合校準(zhǔn)裝置機(jī)械參數(shù)固定時(shí),動(dòng)不平衡引起的離心機(jī)加速度相對(duì)誤差是一個(gè)周期變量,其周期與振動(dòng)臺(tái)振動(dòng)周期相同,其幅度與振動(dòng)臺(tái)的振幅h和離心機(jī)的轉(zhuǎn)速Ω成正比。根據(jù)公式(15)的估計(jì),離心機(jī)相對(duì)誤差幅度為

對(duì)于測量不確定度高于1×10-6量級(jí)的測試校準(zhǔn),這種影響限制了離心-振動(dòng)復(fù)合校準(zhǔn)裝置的使用。在離心-振動(dòng)復(fù)合校準(zhǔn)裝置機(jī)械結(jié)構(gòu)固定的情況下,減小振動(dòng)臺(tái)振幅和離心機(jī)角速度,能夠削弱這種影響。另外,根據(jù)加速度計(jì)整流誤差模型的研究,由動(dòng)不平衡引起的加速度誤差是一個(gè)周期項(xiàng),如果加速度計(jì)z軸方向與IA同方向,那么該誤差項(xiàng)將導(dǎo)致額外的整流誤差。即,經(jīng)過整周期平均,加速度計(jì)的輸出直流量平均值會(huì)比理想情況更大。
2.2 離心-振動(dòng)復(fù)合模型
2.2.1 模型分析
本部分首先對(duì)離心-振動(dòng)復(fù)合校準(zhǔn)系統(tǒng)的輸出加速度進(jìn)行建模,以分析離心-振動(dòng)復(fù)合校準(zhǔn)系統(tǒng)的復(fù)合加速度復(fù)現(xiàn)能力。圖3為離心-振動(dòng)復(fù)合校準(zhǔn)系統(tǒng)結(jié)構(gòu)模型[14-15]。在離心機(jī)轉(zhuǎn)臂(Centrifuge arm)上安裝振動(dòng)臺(tái)(Vibrator),被測單元(Unit under test)安裝在振動(dòng)臺(tái)臺(tái)面上。振動(dòng)臺(tái)的振動(dòng)方向與離心機(jī)轉(zhuǎn)臂的旋轉(zhuǎn)平面呈一定角度。這樣的結(jié)構(gòu),通過離心機(jī)轉(zhuǎn)軸(Rotation axis)的旋轉(zhuǎn)輸出恒加速度,通過振動(dòng)臺(tái)輸出振動(dòng)加速度。振動(dòng)加速度與恒加速度以不同角度的組合,可以實(shí)現(xiàn)不同的多方向、恒加速度與振動(dòng)復(fù)合的輸入。
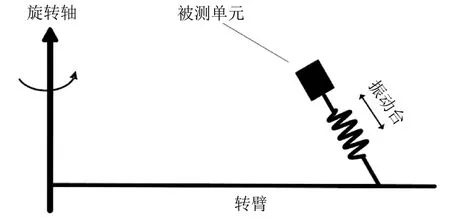
圖3 離心-振動(dòng)復(fù)合校準(zhǔn)系統(tǒng)結(jié)構(gòu)模型
為了明確離心-振動(dòng)復(fù)合校準(zhǔn)系統(tǒng)的輸出,利用坐標(biāo)的齊次變換推導(dǎo)其輸出模型。坐標(biāo)的齊次變換以變換矩陣的形式描述剛體間的相對(duì)空間關(guān)系,每個(gè)變換矩陣由旋轉(zhuǎn)矩陣和平移向量組成,分別用于確定剛體的姿態(tài)和位移的相對(duì)變化。將剛體位移求對(duì)時(shí)間的二次導(dǎo)數(shù),可以得到加速度。變換矩陣可以表示為

式中:A為旋轉(zhuǎn)矩陣,描述坐標(biāo)系之間順時(shí)針的旋轉(zhuǎn)變化引起的姿態(tài)改變,大小為3×3;D為平移向量,大小為3×1。在離心-振動(dòng)復(fù)合校準(zhǔn)系統(tǒng)中,除了振動(dòng)臺(tái)的彈性部件,都可認(rèn)為是剛體。將加速度計(jì)安裝在振動(dòng)臺(tái)臺(tái)面上,建立坐標(biāo)系如圖4所示。通過以下步驟,完成從初始坐標(biāo)系o-x0y0z0到加速度計(jì)坐標(biāo)系o2-x2y2z2的變換:
1)建立離心機(jī)初始坐標(biāo)系o-x0y0z0。初始坐標(biāo)系是固定坐標(biāo)系,表示離心機(jī)的理想初始狀態(tài)。oz0豎直向上,ox0是離心機(jī)靜止時(shí)擺臂的位置,通過右手定則確定oy0。
2)建立離心機(jī)坐標(biāo)系o-x1y1z1。離心機(jī)坐標(biāo)系是運(yùn)動(dòng)坐標(biāo)系,表示離心機(jī)工作時(shí)的狀態(tài)。設(shè)離心機(jī)的角速度大小為Ω,單位是rad/s,則從時(shí)刻0到t,離心機(jī)擺臂轉(zhuǎn)過的角度為Ωt,則得到o-x1y1z1。
3)建立振動(dòng)臺(tái)臺(tái)體坐標(biāo)系o20-x20y20z20。振動(dòng)臺(tái)臺(tái)體坐標(biāo)系是固定坐標(biāo)系,表示振動(dòng)臺(tái)的初始狀態(tài)。由于離心機(jī)施加在加速度計(jì)上的加速度與振動(dòng)臺(tái)臺(tái)體和離心機(jī)轉(zhuǎn)軸的距離R無關(guān),這里只考慮o-x1y1z1沿oy1方向的平移,使得oo20=R,就得到振動(dòng)臺(tái)臺(tái)體坐標(biāo)系。
4)建立過渡坐標(biāo)系o20-x21y21z21和o20-x22y22z22。過渡坐標(biāo)系是固定坐標(biāo)系。通過振動(dòng)臺(tái)臺(tái)體的兩次坐標(biāo)旋轉(zhuǎn)來確定振動(dòng)方向與離心機(jī)旋轉(zhuǎn)平面的相對(duì)姿態(tài)。首先,振動(dòng)臺(tái)臺(tái)體坐標(biāo)系繞o20y20,旋轉(zhuǎn)一定角度βrad,得到過渡坐標(biāo)系o20-x21y21z21,然后過渡坐標(biāo)系o20-x21y21z21繞著o20x21旋轉(zhuǎn)角度αrad,得到過渡坐標(biāo)系o20-x22y22z22。
5)建立加速度計(jì)坐標(biāo)系o2-x2y2z2。加速度計(jì)坐標(biāo)系是固定坐標(biāo)系。設(shè)振動(dòng)臺(tái)的振動(dòng)幅度是H(t),通過過渡坐標(biāo)系o20-x22y22z22沿o20z22平移,使得o2o20=H(t),則得到加速度計(jì)坐標(biāo)系o2-x2y2z2。
以上步驟對(duì)應(yīng)的旋轉(zhuǎn)矩陣和平移向量見表2。其中O3×1表示大小為3×1的O向量,I3×3表示大小為3×3的單位矩陣。上標(biāo)“T”表示矩陣轉(zhuǎn)置。
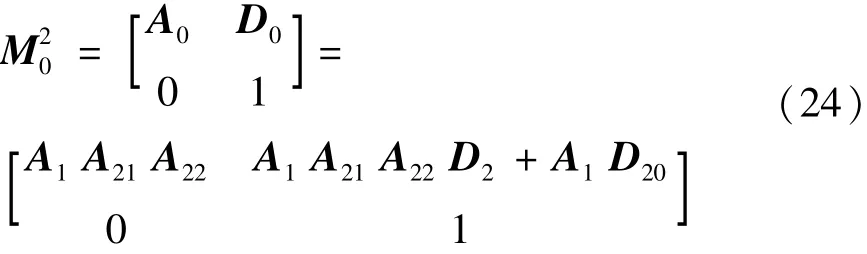
根據(jù)上述坐標(biāo)變換步驟,可以得到成從初始坐標(biāo)系o-x0y0z0到加速度計(jì)坐標(biāo)系o2-x2y2z2的變換矩陣為

將表中的相應(yīng)表達(dá)式代入公式(2),可以得到
所以,

其中,D0是從初始坐標(biāo)系觀察到的位移,其二次導(dǎo)數(shù)為

那么,加速度計(jì)感測到的加速度可以表示為

將公式(25)和(26)代入(27),可得


將表中的相應(yīng)表達(dá)式代入到公式(28),可以求得離心-振動(dòng)復(fù)合校準(zhǔn)系統(tǒng)輸出加速度的一般表達(dá)式為
令:
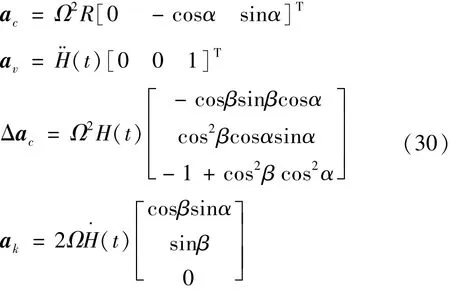
則公式(30)可寫為

式中:a c為離心機(jī)輸出的恒加速度,方向指向離心機(jī)轉(zhuǎn)軸;a v為振動(dòng)臺(tái)產(chǎn)生的振動(dòng)加速度,方向指向振動(dòng)平衡位置;Δa c為因?yàn)榧铀俣扔?jì)隨著振動(dòng)臺(tái)臺(tái)面移動(dòng)引起的位移變化而產(chǎn)生的“偽振動(dòng)加速度”,方向與a c相同;a k為因?yàn)榧铀俣扔?jì)相對(duì)于離心機(jī)旋轉(zhuǎn)平面運(yùn)動(dòng)而引起的科里奧利加速度,簡稱“科氏加速度”,方向與離心機(jī)轉(zhuǎn)速方向和振動(dòng)方向所在平面垂直,即沿著轉(zhuǎn)動(dòng)平面的切線方向。
2.2.2 順臂安裝和垂直安裝分析
若令振動(dòng)臺(tái)位移的表達(dá)式為

則有

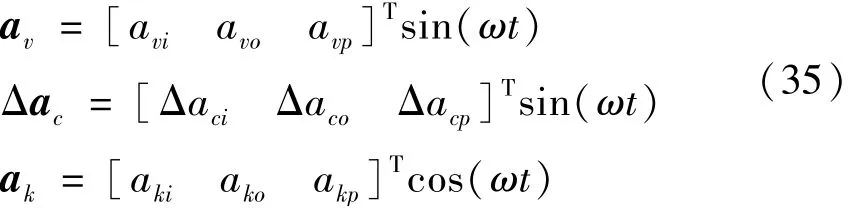
式中:(t)為振動(dòng)加速度;ω為振動(dòng)臺(tái)的角頻率;h為振動(dòng)臺(tái)的振幅。將公示(23)和(24)帶入公式(30)得
顯然,除了ac以外,其他三個(gè)加速度都是與振動(dòng)臺(tái)相關(guān)的周期性的加速度,則公式(31)中周期性加速度施加在加速度計(jì)三個(gè)軸上的加速度分量形式,可以重寫為
離心機(jī)產(chǎn)生的恒加速度與重力加速度也可以寫為

如公式(29)所示的離心-振動(dòng)復(fù)合校準(zhǔn)裝置系統(tǒng)輸出加速度的一般模型,在實(shí)際使用過程中,常用的有兩種特殊模型。第一種是使得振動(dòng)臺(tái)振動(dòng)方向與離心機(jī)旋轉(zhuǎn)平面垂直,稱為“垂臂振動(dòng)”。令α=β=0,代入(34),得離心-振動(dòng)復(fù)合校準(zhǔn)裝置產(chǎn)生的加速度分量為
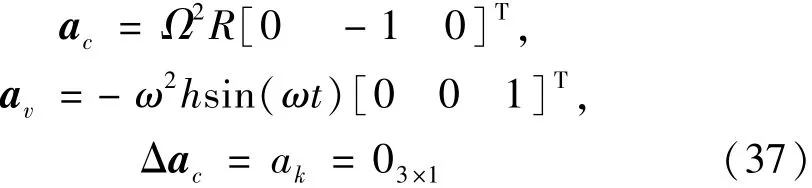
此時(shí)離心-振動(dòng)復(fù)合校準(zhǔn)裝置輸出的加速度可表示為

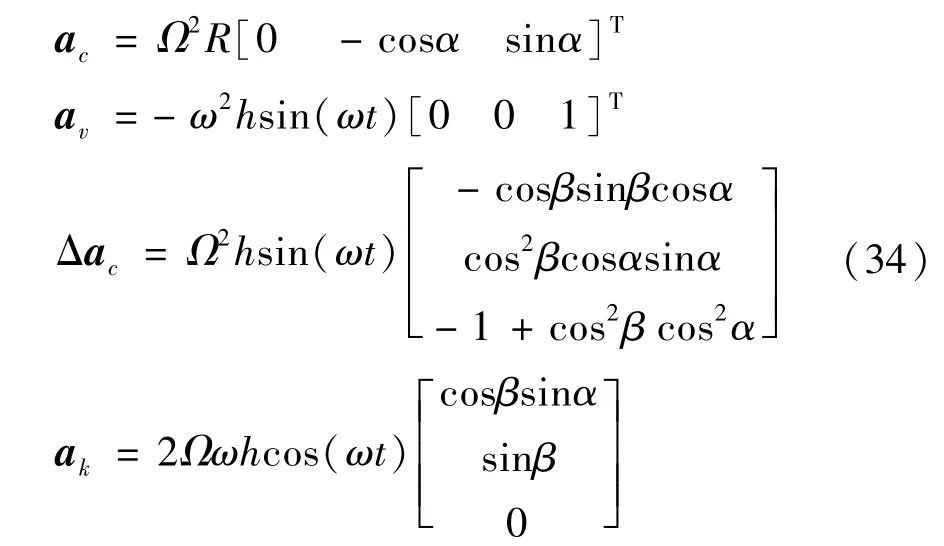
這種情況下,加速度計(jì)坐標(biāo)系中,只有水平方向的恒加速度與豎直方向的振動(dòng)加速度作用,不產(chǎn)生同一方向的復(fù)合。第二種是使得振動(dòng)臺(tái)振動(dòng)方向與離心機(jī)旋轉(zhuǎn)平面平行,稱為“順臂振動(dòng)”。令α=-π/2,β=0,得到離心-振動(dòng)復(fù)合校準(zhǔn)裝置產(chǎn)生的加速度分量為
再考慮重力的影響,此時(shí)離心-振動(dòng)復(fù)合校準(zhǔn)裝置輸出的加速度可表示為

這種情況下,加速度計(jì)坐標(biāo)系中,將有豎直方向的恒加速度與振動(dòng)加速度組成的復(fù)合加速度,而且有明顯的科氏加速度。科氏加速度垂直于離心機(jī)轉(zhuǎn)速方向和振動(dòng)方向組成的平面,在順臂振動(dòng)情況下,如果加速度計(jì)IA與離心力方向一致,那么科氏加速度屬于橫向加速度,加速度計(jì)的橫向靈敏度是確定加速度計(jì)模型的重要參考。在給定橫向靈敏度的前提下,橫向加速度越大,顯然對(duì)加速度計(jì)IA輸出信號(hào)的干擾越大。
3 不確定度分析
以理想順臂振動(dòng)情況下的離心-振動(dòng)系統(tǒng)輸出加速度為例進(jìn)行分析,首先給出理想的順臂振動(dòng)情況下離心-振動(dòng)復(fù)合校準(zhǔn)裝置輸出加速度的形式(不含重力加速度),即
式中:Ω為離心機(jī)角速度,rad/s;R為離心機(jī)工作半徑,即離心機(jī)轉(zhuǎn)軸到振動(dòng)臺(tái)平衡位置的距離,m;H為振動(dòng)臺(tái)的位移,m。若令振動(dòng)臺(tái)位移的表達(dá)式為

式中:ω為振動(dòng)臺(tái)角頻率,rad/s;t為時(shí)間,s。
則有
根據(jù)公式(41)和(43)

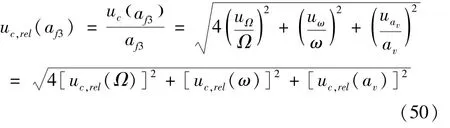
其幅度為

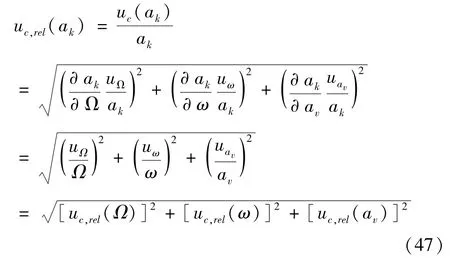
式中:Av=ω2h,為振動(dòng)臺(tái)的振動(dòng)加速度幅度。則科氏加速度相對(duì)不確定度表達(dá)式可以寫為
根據(jù)公式(41)和(44)

其幅度為

式中:af1=Ω2R為離心機(jī)輸出的加速度;af2=ω2h為振動(dòng)臺(tái)輸出的加速度;af3=Ω2h=Ω2av/ω是振動(dòng)臺(tái)在離心力場中運(yùn)動(dòng)運(yùn)動(dòng)引起的“偽振動(dòng)加速度”。af的相對(duì)標(biāo)準(zhǔn)不確定度的平方等于af1、af2和af3的相對(duì)標(biāo)準(zhǔn)不確定度的平方和。離心機(jī)輸出加速度的相對(duì)標(biāo)準(zhǔn)不確定度和振動(dòng)臺(tái)輸出加速度的相對(duì)標(biāo)準(zhǔn)不確定度根據(jù)各自的校準(zhǔn)結(jié)果給出。這里只需要分析af3的相對(duì)標(biāo)準(zhǔn)不確定度
現(xiàn)在,考慮以下因素對(duì)輸出加速度幅度的影響:
1)標(biāo)準(zhǔn)加速度計(jì)輸出電壓測量引入的標(biāo)準(zhǔn)不確定度分量
使用Agilent的3458A真有效值電壓表讀取標(biāo)準(zhǔn)加速度計(jì)的電壓輸出。從檢定證書得到,在測量范圍10-2~10 V內(nèi),電壓測量誤差為0.02%,測量準(zhǔn)確度優(yōu)于讀數(shù)的0.05%;估計(jì)由電壓幅度測量誤差引入的對(duì)測量不確定度評(píng)估的貢獻(xiàn)值為0.05%,認(rèn)為是均勻分布,有

2)振動(dòng)臺(tái)波形失真對(duì)標(biāo)準(zhǔn)加速度計(jì)輸出電壓測量影響的標(biāo)準(zhǔn)不確定度
振動(dòng)臺(tái)產(chǎn)生的正弦運(yùn)動(dòng)中存在諧波失真,且混雜有交流噪聲等其他干擾。這里將影響最大的三次諧波引入的靈敏度誤差作為總諧波失真所引起的測量誤差。根據(jù)GB/T 13823.3-92《振動(dòng)與沖擊傳感器的標(biāo)準(zhǔn)方法》要求,振動(dòng)臺(tái)加速度波形失真da≤5%。實(shí)測160 Hz處,da=2.5%由其帶給電壓測量的最大相對(duì)誤差為:Δda=d2a/2±da/9≈0.31%。認(rèn)為是均勻分布,有:

3)非理想振動(dòng)對(duì)加速度計(jì)輸出電壓測量影響的標(biāo)準(zhǔn)不確定度
非理想振動(dòng)包括橫向、搖擺和彎曲振動(dòng)等。離心-振動(dòng)系統(tǒng)中,科氏加速度是主要的橫向振動(dòng)。這里認(rèn)為橫向振動(dòng)影響為最大。根據(jù)橫向靈敏度測試結(jié)果,可以得到加速度計(jì)最大橫向靈敏度方向,使之與主振動(dòng)方向平行。根據(jù)GB/T 13823.3-92要求,振動(dòng)臺(tái)臺(tái)面中心橫向加速度幅值應(yīng)不大于主振方向加速度幅值的10%,標(biāo)準(zhǔn)加速度計(jì)最大橫向靈敏度不大于2%。實(shí)際采用的標(biāo)準(zhǔn)加速度計(jì)的最大橫向靈敏度為0.19%,實(shí)測160Hz點(diǎn),臺(tái)面橫向振動(dòng)比為5.63%。假設(shè)橫向靈敏度ST和橫向振動(dòng)比a T未知,但是在給定范圍內(nèi)是矩形分布的,那么,由橫向振動(dòng)引入的電壓測量誤差最大為:Δv=STaT=1.07%,引起的相對(duì)誤差為

4)標(biāo)準(zhǔn)加速度計(jì)靈敏度幅值的穩(wěn)定性引入的標(biāo)準(zhǔn)不確定度分量
根據(jù)統(tǒng)計(jì)數(shù)據(jù),標(biāo)準(zhǔn)加速度計(jì)靈敏度的年穩(wěn)定度要優(yōu)于0.2%,視之為正態(tài)分布,則有

5)環(huán)境對(duì)標(biāo)準(zhǔn)加速度計(jì)靈敏度幅值的影響引入的標(biāo)準(zhǔn)不確定度分量
估計(jì)測試環(huán)境的溫度、安裝扭矩、工裝和電纜固定等對(duì)標(biāo)準(zhǔn)加速度計(jì)靈敏度幅值的影響小于0.07%,認(rèn)為是均勻分布,則有

6)環(huán)境對(duì)適配放大器增益的影響引入的標(biāo)準(zhǔn)不確定度分量
測試環(huán)境對(duì)適配放大器增益的影響,一般估計(jì)不大于0.02%,看作均勻分布,則

7)振動(dòng)頻率測量引入的標(biāo)準(zhǔn)不確定度分量
一般采用頻率計(jì)對(duì)振動(dòng)信號(hào)的角頻率ω進(jìn)行測量。采用標(biāo)準(zhǔn)信號(hào)源HP33220A,頻率準(zhǔn)確度可達(dá)2×10-6。考慮時(shí)標(biāo)準(zhǔn)確度、觸發(fā)誤差、頻率漂移以及測試環(huán)境的溫度影響等因素,認(rèn)為其對(duì)測量不確定度的影響為0.04%,且為均勻分布,因此

8)離心機(jī)角速度平均值測量引入的標(biāo)準(zhǔn)不確定度分量
角速度平均值誤差主要是由角速度測量裝置和方法決定的。這里采用定時(shí)測角法進(jìn)行測量,即在給定時(shí)間內(nèi)測量轉(zhuǎn)過的角度。用公式表示為

則測量的相對(duì)誤差可以表示為

式中:時(shí)間t的測量采用高精度晶振,時(shí)間精度可達(dá)10-7s,取Δt=1×10-7s;角度θ則通過德國海德漢公司的RON 786光柵角度編碼器測量,角度誤差Δθ=2″。設(shè)置定時(shí)t=0.1 s,測得轉(zhuǎn)過的角度θ=36°。則角速度平均值的相對(duì)誤差為

且為均勻分布,則

9)離心機(jī)輸出加速度的標(biāo)準(zhǔn)不確定度
按照離心機(jī)的檢定結(jié)果,離心機(jī)輸出加速度的標(biāo)準(zhǔn)不確定度為3.431×10-5,認(rèn)為是均勻分布,則

10)振動(dòng)臺(tái)輸出加速度的標(biāo)準(zhǔn)不確定度
按照振動(dòng)臺(tái)的檢定結(jié)果,振動(dòng)臺(tái)輸出加速度的標(biāo)準(zhǔn)不確定度為0.78%,認(rèn)為是均勻分布,則

11)系統(tǒng)噪聲的影響
所謂系統(tǒng)噪聲,是指功率放大器不加信號(hào)時(shí),振動(dòng)臺(tái)輸出的電壓波形。系統(tǒng)噪聲是由電壓測量系統(tǒng)噪聲、離心機(jī)系統(tǒng)噪聲以及其他背景噪聲綜合引起的。振動(dòng)臺(tái)輸出加速度波形失真實(shí)際上包含了這類噪聲的影響。因此不單獨(dú)列出系統(tǒng)噪聲引起的不確定度。
根據(jù)表3所示的不確定度分配表,計(jì)算科氏加速度幅度的相對(duì)標(biāo)準(zhǔn)不確定度為

表3 不確定度分配表

其中

而復(fù)合加速度的幅度的相對(duì)標(biāo)準(zhǔn)不確定度為

4 設(shè)備及組成
以離心機(jī)為主體,振動(dòng)臺(tái)安裝在離心機(jī)臂(或臺(tái)體)上,一般分為振動(dòng)臺(tái)順臂安裝和垂臂安裝兩種情況,即:離心加速度與振動(dòng)加速度同向;離心加速度與振動(dòng)加速度垂向[11-12]。
垂臂安裝情況下,離心加速度與振動(dòng)加速度理論上沒有耦合,獨(dú)立施加在加速度計(jì)上,即加速度計(jì)受到三個(gè)相互獨(dú)立的加速度輸入:來自離心機(jī)的離心加速度、來自振動(dòng)臺(tái)的振動(dòng)加速度以及重力加速度。
順臂安裝情況下,由于振動(dòng)臺(tái)臺(tái)面及臺(tái)面上夾具、夾具及加速度計(jì)有相對(duì)于離心機(jī)旋轉(zhuǎn)平面的運(yùn)動(dòng),將產(chǎn)生額外的科里奧利加速度,簡稱“科氏加速度”。科氏加速度矢量與振動(dòng)加速度矢量、離心機(jī)旋轉(zhuǎn)角速度矢量相互垂直。科氏加速度與振動(dòng)加速度密切聯(lián)系,與離心機(jī)旋轉(zhuǎn)角速度也密切聯(lián)系。這種情況下,加速度計(jì)受到四個(gè)加速度輸入:來自離心機(jī)的離心加速度、來自振動(dòng)臺(tái)的振動(dòng)加速度、由于相對(duì)離心機(jī)旋轉(zhuǎn)平面運(yùn)動(dòng)產(chǎn)生的科氏加速度以及重力加速度。
我所研制的“離心-振動(dòng)復(fù)合校準(zhǔn)裝置”整體結(jié)構(gòu)主要由離心轉(zhuǎn)臺(tái)、振動(dòng)臺(tái)、控制系統(tǒng)組成,如圖5所示。
圖5 離心-振動(dòng)復(fù)合校準(zhǔn)裝置
5 實(shí)驗(yàn)結(jié)果
針對(duì)離心機(jī)產(chǎn)生的“偽振動(dòng)”對(duì)校準(zhǔn)結(jié)果的影響,本文采用獨(dú)立控制的兩組線圈,一組產(chǎn)生基礎(chǔ)振動(dòng)信號(hào),稱為“基礎(chǔ)線圈”;另一組產(chǎn)生用于抵消“偽振動(dòng)”的激振力,稱為“補(bǔ)償線圈”。如圖6所示。兩組線圈采用獨(dú)立的激勵(lì)電流接口(IN1,OUT1和IN2,OUT2),獨(dú)立進(jìn)行控制。在振動(dòng)臺(tái)臺(tái)體內(nèi)部設(shè)置了一只非接觸式電渦流位移傳感器,實(shí)時(shí)監(jiān)測振動(dòng)臺(tái)活動(dòng)部件(動(dòng)圈)偏離理想平衡位置的位移,并根據(jù)該位移的變化,調(diào)整補(bǔ)償線圈的激勵(lì)電流,使其產(chǎn)生一個(gè)與實(shí)際“偽振動(dòng)”相反的振動(dòng),達(dá)到補(bǔ)償“偽振動(dòng)”的目的。圖7為本文采用的振動(dòng)臺(tái)及其控制系統(tǒng)的實(shí)物圖。上位機(jī)與下位機(jī)通過無線方式通信。無線動(dòng)態(tài)數(shù)據(jù)采集獲得振動(dòng)臺(tái)動(dòng)圈位置、動(dòng)圈溫度以及振動(dòng)臺(tái)臺(tái)面上安裝的傳感器信號(hào)等數(shù)據(jù),并發(fā)送到上位機(jī)控制中心。上位機(jī)通過實(shí)時(shí)監(jiān)測振動(dòng)臺(tái)動(dòng)圈的位置,來調(diào)節(jié)補(bǔ)償線圈的電流大小和方向,實(shí)現(xiàn)對(duì)“偽振動(dòng)”的抵消。

圖6 雙線圈獨(dú)立控制補(bǔ)償離心力示意圖
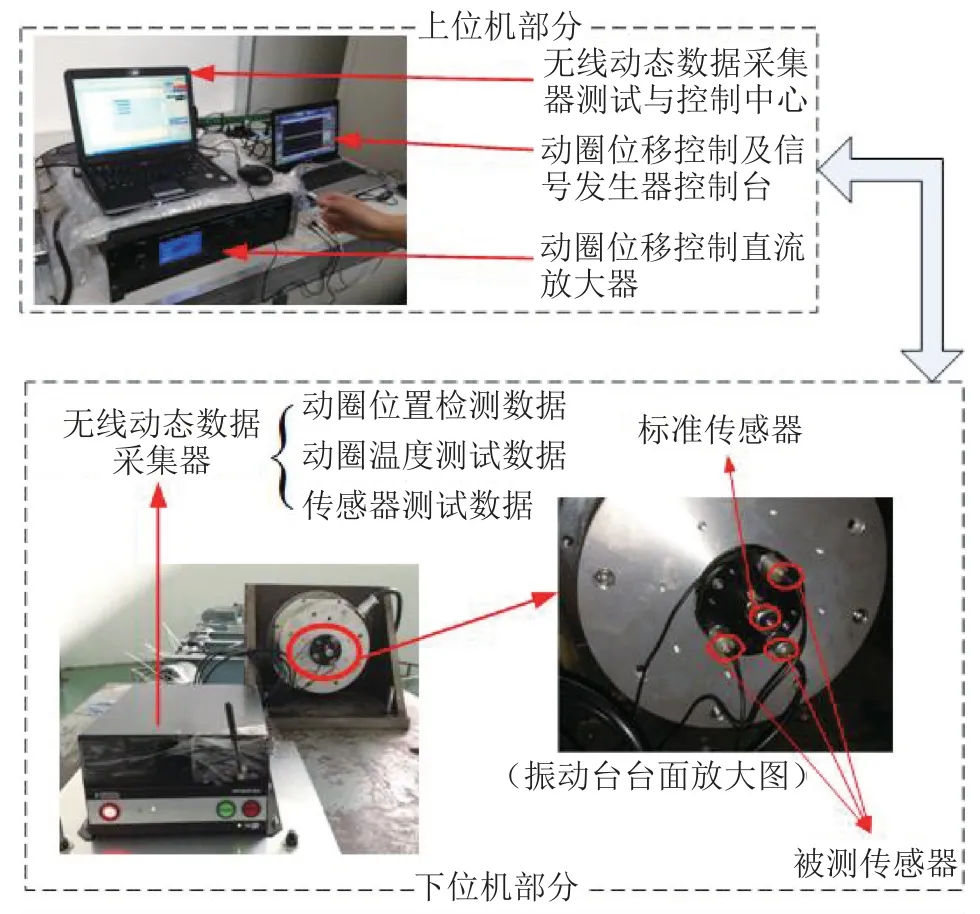
圖7 電磁振動(dòng)臺(tái)控制系統(tǒng)
由于電磁控制簡單實(shí)用,響應(yīng)速度快,這套方案取得較為滿意的實(shí)際效果。總體而言,在20~100 Hz的情況下,該方案能夠很好的抵消“偽振動(dòng)”影響;在100~2000 Hz情況下,這種影響還是比較明顯的。圖8是施加雙線圈獨(dú)立控制之后的振動(dòng)臺(tái)輸出信號(hào)。圖8(a)為在輸入信號(hào)恒加速度20g,振動(dòng)幅度20g,振動(dòng)頻率40 Hz下的振動(dòng)臺(tái)輸出信號(hào);圖(b)為在輸入信號(hào)恒加速度5g,振動(dòng)幅度20g,振動(dòng)頻率40 Hz下的振動(dòng)臺(tái)輸出信號(hào);圖8(c)為在輸入信號(hào)恒加速度20g,振動(dòng)幅度20g,振動(dòng)頻率160 Hz下的振動(dòng)臺(tái)輸出信號(hào)。圖8(a)和圖8(b)的信號(hào)顯示,振動(dòng)臺(tái)的輸出信號(hào)是與設(shè)置一致的。圖8(c)的信號(hào)顯示,當(dāng)振動(dòng)頻率較高時(shí),“偽振動(dòng)”影響沒有得到很好的消除。相反地,補(bǔ)償線圈提供了額外的激振力,施加在振動(dòng)臺(tái)動(dòng)圈上,使得振動(dòng)幅度變大。
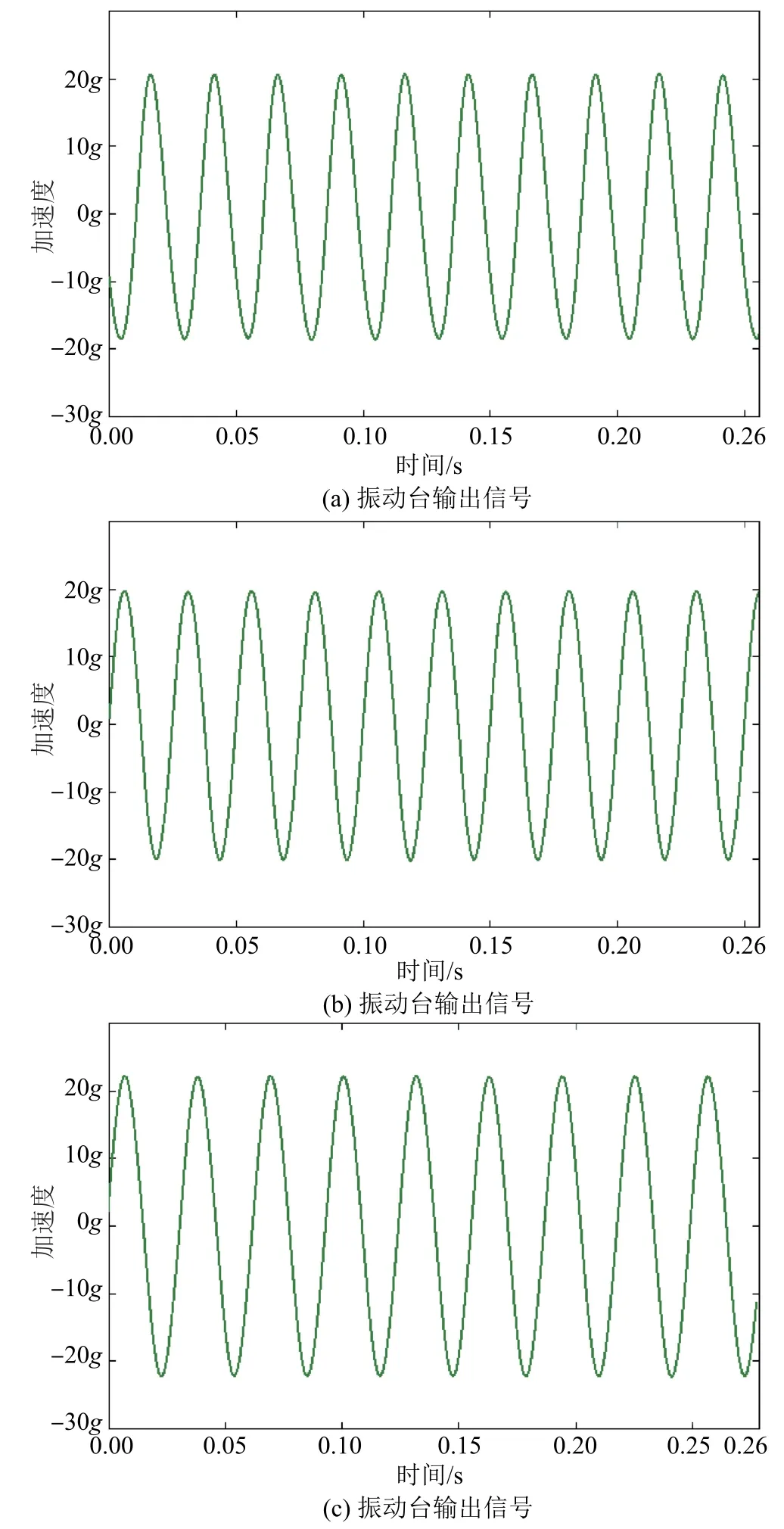
圖8 振動(dòng)臺(tái)輸出信號(hào)
6 結(jié)論
本文對(duì)離心-振動(dòng)校準(zhǔn)裝置進(jìn)行了詳細(xì)介紹,分別從動(dòng)不平衡問題、復(fù)合方式、復(fù)合模型三個(gè)方面進(jìn)行了研究。并采用數(shù)值方法對(duì)離心-振動(dòng)模型誤差進(jìn)行計(jì)算,分析了復(fù)合環(huán)境下動(dòng)不平衡的影響,討論了在順臂安裝和垂直安裝下受到的加速度大小,得出了在離心-振動(dòng)復(fù)合校準(zhǔn)裝置機(jī)械結(jié)構(gòu)固定的情況下,減小振動(dòng)臺(tái)振幅和離心機(jī)角速度,能夠削弱動(dòng)不平衡影響的結(jié)論。本文建立的校準(zhǔn)裝置和校準(zhǔn)方法,能夠模擬真實(shí)校準(zhǔn)環(huán)境,具有重要的理論價(jià)值和實(shí)際意義。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
