基于模糊自適應PID的無人駕駛車輛路徑跟蹤控制
2021-10-15 10:41:52張佳奇楊佳龍葛平淑
大連民族大學學報 2021年3期
關鍵詞:模型
張佳奇,張 濤,楊佳龍,葛平淑,肖 鵬
(大連民族大學 機電工程學院,遼寧 大連 116605)
路徑跟蹤控制問題是無人駕駛車輛領域中的重要研究內容之一,有利于降低交通事故,提高車輛主動安全性能。目前,路徑跟蹤控制模型主要分為預瞄跟隨模型和智能控制模型兩大類[1]。預瞄跟隨模型的基本原理是在路徑前方設立預瞄點,使車輛獲取預瞄點所處位置信息,即未來路徑曲率及行駛偏差,并根據這些信息控制無人駕駛車輛,以實現對目標道路的有效跟蹤。控制算法大多采用PID控制、模糊控制、滑模控制及最優控制等[2-4],其優點在于魯棒性強且參數易調節,但較少考慮車輛動力學和駕駛環境約束的影響。智能控制模型將智能控制算法引入駕駛員模型,目前主要有基于模糊邏輯[5]、神經網絡[6]、模型預測[7]和深度強化學習等算法[8]。智能控制模型模擬人的思維能力,使系統更加智能化,但需要較大計算量,現階段實時性不易達到。
綜上,本文基于預瞄理論建立考慮縱向車速的運動學模型,以前輪轉角作為控制系統的輸入,設計基于橫向偏差和航向偏差的模糊自適應PID路徑跟蹤控制算法。分析量化因子和比例因子的選取原則,利用模糊理論對PID參數進行自適應調整,基于Carsim與Simulink對所提算法進行聯合仿真實驗。
1 考慮縱向車速的車輛預瞄運動學建模
1.1 慣性坐標系下車體運動學模型
車輛與道路的相對運動關系如圖1。
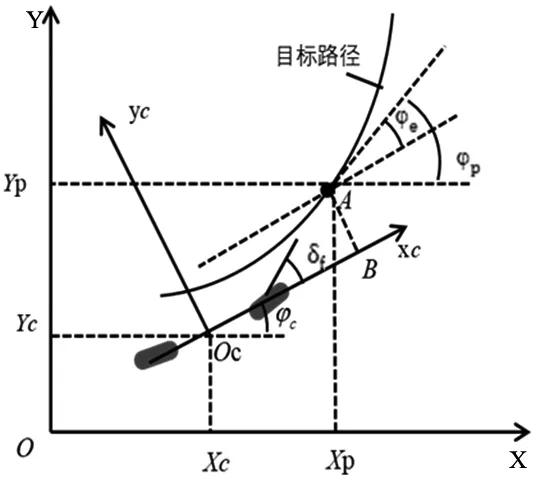
圖1 車輛和道路的相對運動關系
在車輛坐標系中,假設車輛質心坐標為(xc,yc),橫坐標與X軸夾角為φc,則得到車輛的運動學模型如式(1)。
(1)
式中:ωc為車輛質心處的橫擺角速度;vc為質心處的縱向速度。由公式(1)能夠進一步推導出車輛下一時刻的行駛軌跡,設車輛目標道路上的預瞄點為A,坐標為(XP,YP),切線方向與X軸形成的夾角為φp,從而得出車輛的運動學模型如下:
(2)
式中:xe為車輛前方預瞄距離;ye為車輛質心處與預瞄點之間的橫向偏差;φe為車輛質心處與預瞄點之間的航向偏差。
1.2 基于預瞄的轉向角生成器
預瞄點(XP,YP)處的道路曲率半徑R與預瞄距離xe和航向偏差φe之間的關系可以表示為
(3)
車輛期望前輪轉角:
δf=tan-1(L/R)。
(4)
將式(4)代入式(3)中得到:
δf=tan-1(2Lsinφe/xe)。
(5)
航向誤差φe可跟根據預瞄距離xe和預瞄點處橫向軌跡誤差ye表示:
sinφe=ye/xe。
(6)
預瞄距離xe的大小與縱向車速vc有關:
xe=kvc。
(7)
式中,k為調整比例系數。
將式(6)和式(7)代入式(5)中,可得前輪期望轉角:
(8)
1.3 航向誤差生成器
車輛當前質心點OC加上預瞄距離xe得到點B,點B在目標路徑上的投影即為預瞄點A,從而得到當前目標方向φp:
(9)
車輛當前質心位置OC,坐標為(xc,yc),預瞄點A處坐標為(XP,YP),從而得到:
(10)
由(6)式和(8)式進一步得出航向偏差:
φe=φp-δf。
(11)
2 路徑跟蹤控制器設計
模糊自適應PID是在傳統PID的基礎上增加模糊控制規則庫,根據建立好的規則對PID參數進行自適應調整。模糊控制在解決非線性及不確定問題上具有較好的控制效果。本文設計模糊自適應PID從而實現自動駕駛車輛的路徑跟蹤控制。控制框圖如圖2。
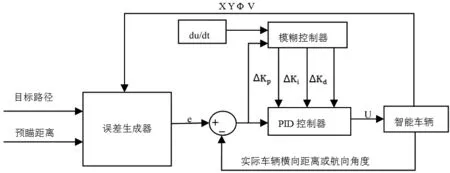
圖2 模糊自適應PID路徑跟蹤控制框圖
控制器輸入分別為橫向偏差ye、橫向偏差變化率yec,航向偏差φe及航向偏差變化率φec。輸出為ΔKp、ΔKi、ΔKd。將控制輸入、輸出的基本論域規劃為13個等級,控制輸入輸出采用三角形隸屬度函數,中間隸屬度函數較為陡直的區域分辨率高,控制靈敏度也比較高,輸入、輸出變量隸屬度函數如圖3。
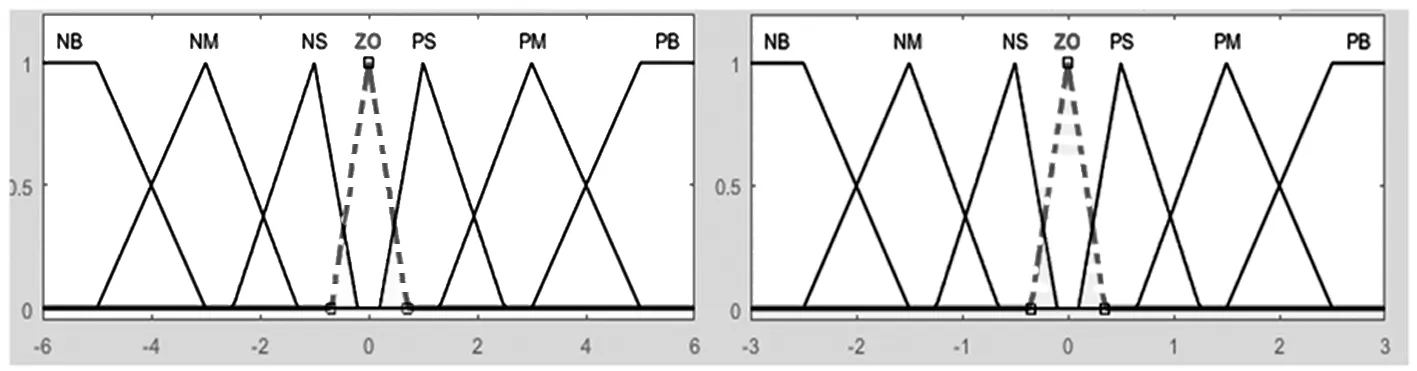
a)輸入變量隸屬度函數 b)輸出變量隸屬度函數
從汽車駕駛的經驗角度制定出一套模糊控制規則。采用if-then語句進行模糊規則庫的建立,具體可表示如下:
ifyeis NB andyecis NB
thenΔKpis PB andΔKiis NBΔKdis PS
模糊自適應PID控制器計算自適應調整參數:
(12)
式中:Kp、Ki、Kd為初始PID參數;k1、k2、k3為比例因子;ΔKp、ΔKi、ΔKd是經模糊規則調整得到的參數。
模糊自適應PID最終輸出參數:
式中,e(k)表示第k個采樣時刻輸入的偏差。
利用Mamdani的模糊推理方法,根據極大值極小值法得到模糊控制量的輸出矢量,解模糊選取重心法,模型輸出曲面如圖4。

圖4 模型輸出曲面
在建立模糊規則庫的基礎上,對量化因子和比例因子的選取也做了相應的仿真分析。利用設定不同的航向誤差范圍,通過設定閾值,整定出車輛偏航誤差大與誤差小兩種情況的比例因子與量化因子。實驗結果表明:
(1)當路徑跟蹤偏差比較大時,此時應增加橫向偏差對控制輸出的影響,量化因子起主導作用,應加大橫向偏差比例因子與航向誤差比例因子的比值。控制偏差在閾值45°的仿真結果如圖5。
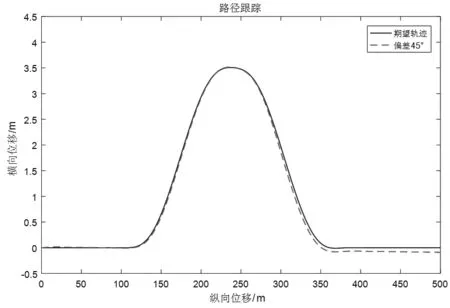
圖5 偏差閾值45°時路徑跟蹤效果
(2)當路徑跟蹤偏差較小時,控制量應著重考慮超調給系統帶來的影響,要以系統穩定性為主要出發點,這時應加航向偏差相對橫向偏差的控制權重,加大航向偏差的量化因子,減小橫向偏差的量化因子,控制輸出量的比例因子也應減小。控制偏差在閾值12°的仿真結果如圖6。
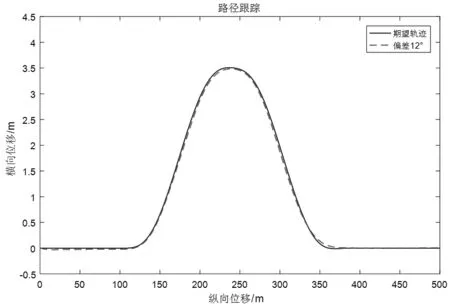
圖6 偏差閾值12°時路徑跟蹤效果
3 基于Carsim與Simulink聯合仿真的路徑跟蹤控制仿真
基于CarSim軟件建立車輛模型,設置各子系統和行駛工況的參數。在MATLAB/Simulink中構建系統路徑跟蹤控制策略。在CarSim中設置控制變量的輸入與輸出,獲取車輛實時動態響應。CarSim的輸入接口為前輪轉角,輸出接口為航向角、質心縱向速度、質心坐標位置、車輛與目標道路的前視距離、前方道路目標點的位置等。在Simulink中建立轉角生成器及路徑跟蹤控制器。聯合仿真流程如圖7,控制策略如圖8。
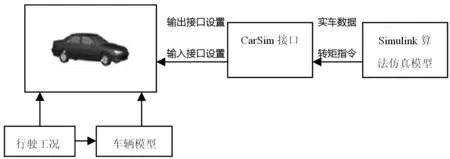
圖7 CarSim/Simulink聯合仿真流程
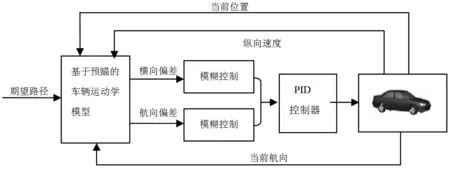
圖8 路徑跟蹤控制策略
選取路徑較為復雜的U型線、伯努利雙紐線兩種工況進行仿真分析。
(1)U型線工況。選取20 km·h-1、40 km·h-1、60 km·h-1的車速,基于U型道路,對PID控制器和模糊自適應PID控制器進行仿真,路徑跟蹤效果如圖9。從仿真結果來看,模糊自適應PID較傳統PID控制算法,具有較好的車輛路徑跟蹤性能,使目標車輛更能可靠穩定地跟蹤期望軌跡。表明模糊自適應PID較傳統PID,具有較好的路徑跟蹤性能,隨著速度的增大,系統的非線性明顯,傳統PID控制效果逐漸變差,模糊自適應PID依舊能夠較好地跟蹤路徑。

a)速度20 km·h-1 b)速度40 km·h-1 c)速度60 km·h-1
(2)伯努利雙紐線工況。伯努利雙紐線工況較為復雜,能更好地體現測試車輛的各項駕駛性能。本文選取20 km·h-1、40 km·h-1、60 km·h-1的車速,基于伯努利雙紐線,對PID控制器和模糊自適應PID控制器進行仿真,仿真結果如圖10。在直線路段或者速度較低時,兩種控制方法都能較好地跟蹤路徑。但隨著車速的增加,在曲線路段,常規PID控制器參數由于不能及時調整,誤差逐漸增大。模糊自適應PID控制由于能及時調整控制器參數,跟蹤效果較PID更優。在車速較高的曲線路段,模糊自適應PID的跟蹤效果還可以進一步提高。分析原因,一方面車速提高,車輛動力學特性明顯;另一方面,彎曲路段時,基于預瞄的車輛運動學模型有待進一步優化。
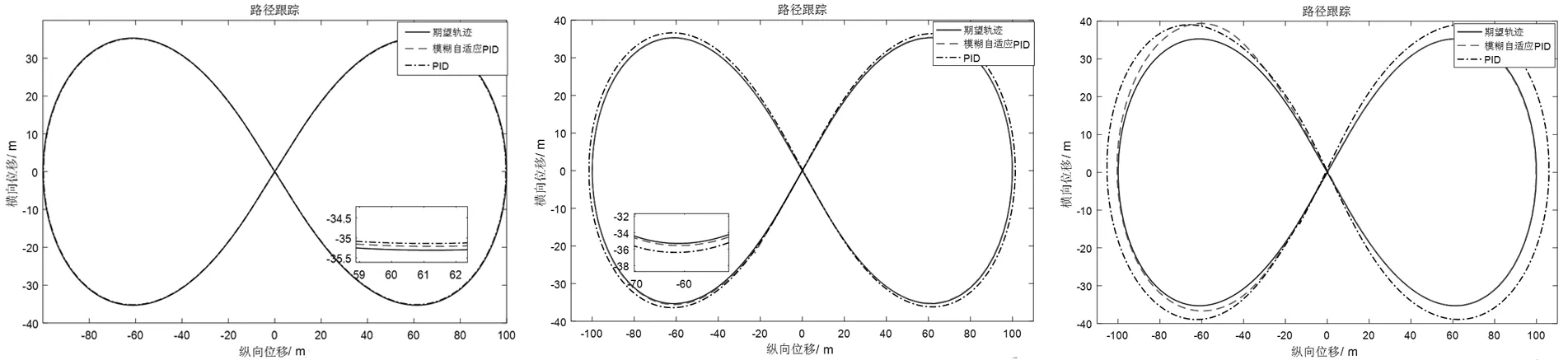
a)速度20 km·h-1 b)速度40 km·h-1 c)速度60 km·h-1
4 結 語
本文基于車輛運動學預瞄及誤差模型設計了基于模糊自適應PID的路徑跟蹤控制器,基于CarSim/Simulink聯合仿真進行實驗驗證。仿真結果表明,本文所設計的模糊自適應PID控制器在直線路段或速度較低的曲線路段能夠精確可靠地跟蹤期望路徑。下一步將基于本文研究基礎,重點探討高速且曲率較大的道路上的路徑跟蹤控制模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19