CarSim和Matlab/Simulink聯合仿真分布式驅動電動車ACC研究
2021-10-19 03:13:34沈子鑒曾慶東
重慶理工大學學報(自然科學) 2021年9期
沈子鑒,李 剛,曾慶東
(遼寧工業大學 汽車與交通工程學院, 遼寧 錦州 121001)
隨著輔助駕駛技術的迅速發展,前方預警、緊急制動和自適應巡航控制等功能在汽車上的應用越來越多,其中自適應巡航控制系統簡稱為ACC(adaptive cruise control)系統,它是常規巡航控制系統的擴展[1]。
自適應巡航控制系統的部分功能與傳統的巡航控制系統一樣,可以使車輛保持設定的恒定速度,但是重要的區別在于,具有ACC功能的車輛面對前方行駛較慢的車輛時,會自動減速行駛,然后以設定的距離跟隨較慢的車輛,一旦前方道路通暢,ACC系統將會控制車輛保持到先前設定的巡航速度。在此過程中,駕駛員可以隨時優先于ACC控制系統[2],接管車輛的控制權。通過自適應巡航功能的控制,在保證駕駛員輕松安全行駛的情況下,使車輛能夠和諧地集成到交通流中。
分布式驅動被認為是未來電動汽車發展的終極驅動形式。分布式驅動電動車具有四輪驅動力矩可以獨立控制的優點,并且沒有傳統機械傳動系統,降低了整車質量,同時為底盤布置提供了更大的發揮空間,使控制更加精確、靈活,極大地提高了傳遞效率[3-4]。將自適應巡航系統與分布式驅動電動汽車相結合,可為ACC系統在分布式驅動電動汽車上的應用提供合理方案。
1 ACC控制架構設計
整車控制結構如圖1所示,分為4個部分:信號接收器、上層控制器、下層控制器和執行器。信號接收器是自適應巡航控制器所有輸入信號的匯集,如自車車速、駕駛員設定車速、縱向相對距離和相對速度。上層控制器是通過信號處理后,根據主目標運動狀態信息計算巡航模式的期望加速度和跟車模式的期望加速度,然后經過兩種模式的切換邏輯判斷輸出最終確定的期望加速度。下層控制器分為驅動控制器和制動控制器兩部分,分別根據上層控制器輸出的期望加速度計算對應的期望驅動力矩和期望制動壓力。
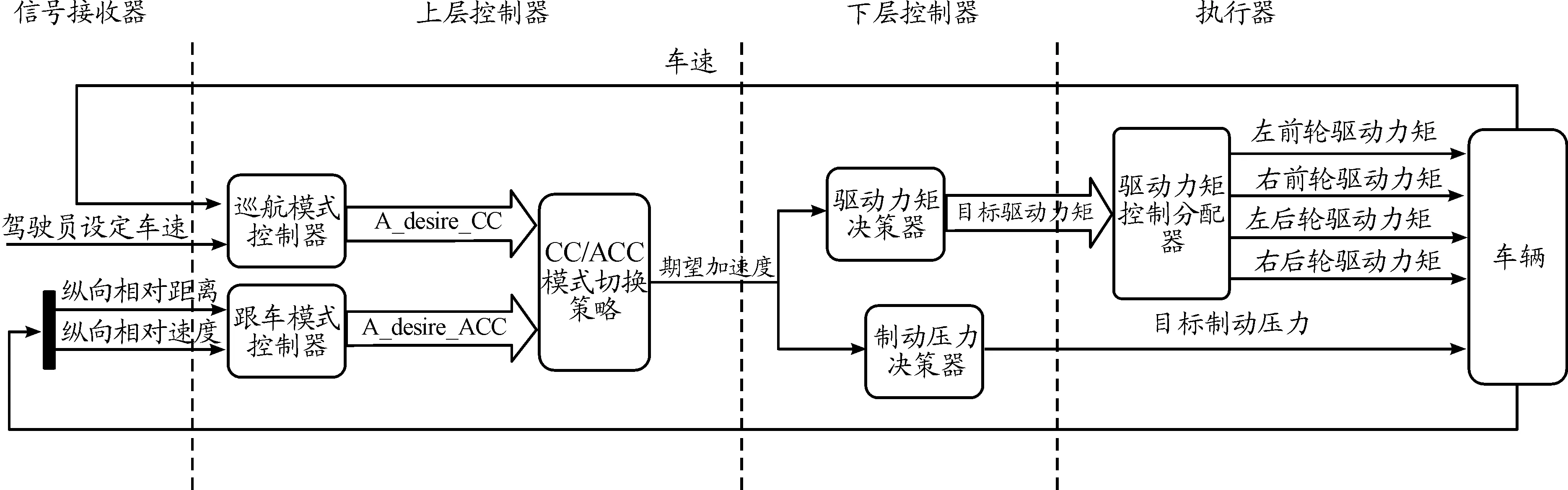
圖1 整車控制結構框圖
2 ACC上層控制器設計
自適應巡航控制系統的上層控制器是根據前方目標車輛的運動狀態信息計算期望加速度。首先建立車距模型,其次分別通過PID控制和LQR控制算法解算巡航模式和跟車模式下的期望加速度,最后設計不同模式間的切換策略。
2.1 車距模型建立
安全距離模型其實是計算汽車跟前方主目標車輛保持多少距離合適,它是自適應巡航控制系統的主要控制策略之一。安全距離并不是一個固定的長度單位,而是所謂的TTC[5-6],即假設保持當前相對速度,兩車發生追尾所需要的時間。
如果安全距離模型的輸出結果過大,則會導致與前方車輛的間隙較大,并且會造成后方車輛的抗議,給交通道路利用率帶來更大的壓力;如果安全距離模型輸出的計算結果過小,則會與前面行駛的車輛保持比較近的間隙,有追尾風險,安全車距是最小停車距離與當前車速的函數[7]。
目前大部分安全車距的研究分為3種車距策略:恒車距、恒時距和變時距。恒車距策略是使所駕駛的車輛與前方目標車輛保持固定的距離,這顯然不符合駕駛習慣并且無法滿足駕駛員對舒適性的要求。恒時距即固定車間時距CTH(constant time headway),與可變車間時距VTH(variable time headway)的區別在于車間時距的數值是否為固定值。可變車間時距是隨車速變化的量。選用恒時距策略計算期望距離:
ddes=τ·v+d0
(1)
式中:ddes為期望的跟車車距(m);τ為車間時距,選用固定值,取值范圍為1.4~2.8 s;v為所駕駛車輛的實際車速(m/s);d0為兩車之間的最小安全距離(m),取值為3~8 m。
2.2 巡航模式期望加速度計算
在分布式驅動電動車的巡航控制系統中,通過控制四輪驅動電機的驅動力矩控制車輛達到希望的車速。巡航控制系統的架構設計成分層控制結構,分為上層控制器和下層控制器[8]。上層控制器決定車輛加速度的期望值,在上層控制器設計的性能要求中,保證控制器的穩態跟蹤誤差為零是必要的,即車輛的速度應該收斂于駕駛人設定的期望速度值。
巡航控制系統常用實現算法主要有經典PID控制算法、增量式PID控制算法、自適應控制算法等,其中在工程實踐中應用最為廣泛的是經典PID控制算法[9]。因為該算法簡單易于調節,可靠并且魯棒性高,尤其是針對巡航控制系統中駕駛員設定速度與車輛當前車速偏差量的這種單一控制變量的調節,PID控制算法完全可以達到速度控制的效果。
式(2)是PID控制算法最原始的表達式:
(2)
離散化處理后得到式(3):
(3)
e(t)=Vx-Vset
(4)
巡航控制系統選擇的典型算法是使用速度誤差作為反饋的PI控制,經過大量調節試驗,最終選取參數Kp為0.5,Ki為0.1。巡航模式下的期望加速度表達式如下:
Ades_CC=-Kp(Vx-Vset)-Ki(Vx-Vset)
(5)
2.3 跟車模式期望加速度計算
自適應巡航控制車輛的縱向控制系統結構通常也為分層控制設計,與巡航控制系統相同,它同樣是由一個上層控制器和一個下層控制器組成的。上層控制器決定著每輛車的期望加速度,下層控制器決定執行驅動電機或制動系統控制命令達到所計算出來的期望加速度。
線性二次型調節器(linear quadratic regulator,LQR)理論是現代控制理論中最早發展成熟的一種狀態空間設計方法,是基于模型的控制器,它用車輛的運動狀態使誤差最小化。通過這種方法,可以得到狀態線性反饋的最優控制規律,容易構成閉環最優控制[10]。自適應巡航控制車輛可以看作是線性二次優化問題,LQR調節器的目的是找到控制量u,使x足夠小,此時系統達到了穩定狀態,同時也要u足夠小,因為這樣便意味著系統花費了最小的控制代價達到目的。本文中通過狀態反饋控制原理,使跟隨距離誤差、速度誤差以及控制輸入最小化。
根據受控車輛和前車的運動狀態可以建立狀態空間模型,寫成如下形式:

(6)
在狀態空間方程中狀態向量是由自車與前車相對距離和相對速度組成的矩陣:
(7)
控制量u是自車加速度,常系數矩陣A和控制系數矩陣B都是由系統本身的參數決定,即

(8)
為了達到上述效果,定義代價函數:

(9)
式中:Q為狀態權重矩陣,R為控制權重矩陣,2個權重矩陣定義如下:
(10)
設計的狀態反饋控制器為:
u=-Kx
(11)
可以通過求解方程式(9),根據李雅普諾夫的第二公式和黎卡提方程確定目標車輛的期望加速度:
ATP+PA-PBR-1BTP+Q=0
(12)
在式(12)中,P是黎卡提方程的正定穩態解,取反饋矩陣K如下:
K=R-1BTP
(13)
因此,根據設計的狀態反饋控制器,計算所需的期望加速度:
Ades=u=-Kx
(14)
LQR最優設計是指設計出的狀態反饋控制器K要使二次型目標函數J取最小值,而K是由Q和R唯一決定的,因此Q、R的選擇尤為重要。經過大量的反復調試,確定Q中狀態權重系數ρ1為1,ρ2為0.1,R中控制權重系數r為50。
自適應巡航系統跟車模式的上層控制器輸入量有2個:一個是傳感器感知前方目標車輛與自車的縱向相對速度ΔV,另一個是縱向相對距離ΔD與期望距離ddes的差值。經過k1、k2的調節,獲得輸出量為跟車模式下的期望加速度Ades_ACC,如表達式(15)所示,經過反復調試后其中的參數k1取為0.14,k2取為0.1。
Ades_ACC=k1(ΔD-ddes)+k2ΔV
(15)
2.4 巡航與跟車模式切換策略設計
巡航模式和跟車模式有各自的上層控制器,分別用不同的控制算法計算對應模式下的期望加速度,兩種情況下得到的期望加速度會有差異,而最終輸出的期望加速度值影響整車的驅動和制動控制,因此,巡航和跟車2種控制模式的選擇邏輯至關重要。跟車和巡航模式切換邏輯如圖2所示。
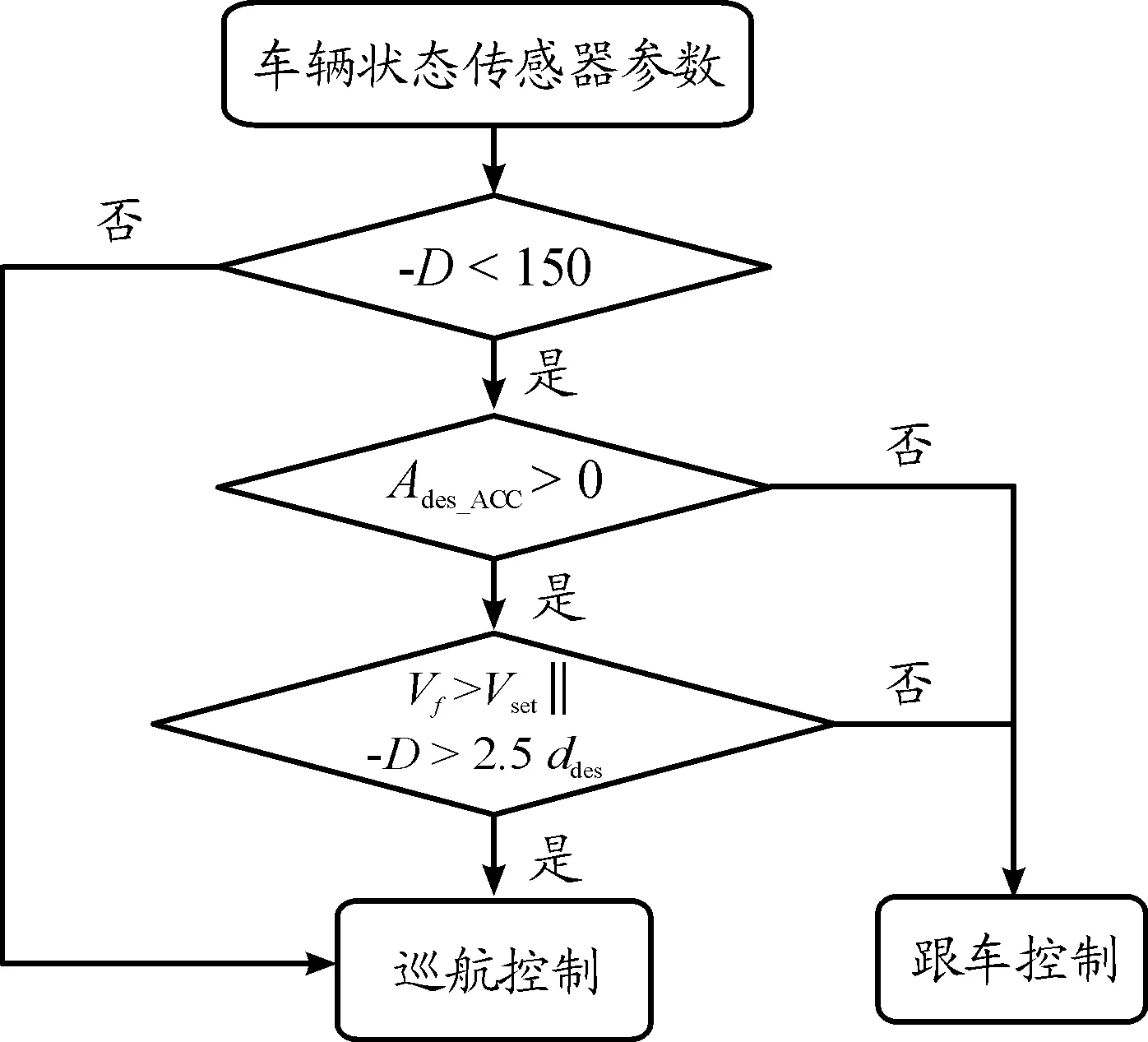
圖2 跟車和巡航模式切換邏輯框圖
1) 巡航控制是建立在前方無車或者前方車與本車處于一個比較安全的狀態下執行的,在本文中設定的傳感器探測距離是150 m。如果前方無車,傳感器會返回150 m,若前方有車,則會返回毫米波雷達和視覺傳感器探測信息融合后的兩車相對距離。因此,當兩車相對距離ΔD為150 m時,說明前方無車,執行巡航控制。
2) 當ΔD<150 m時,說明前方有車,此時進一步考慮兩車的距離是否安全,這一點通過ACC上層控制器計算出的跟車模式的期望加速度Ades_ACC進行判斷,當Ades_ACC>0時,ACC控制器認為前車較遠或者前車速度比本車快,還有加速的空間,即此時兩車狀態比較安全;當Ades_ACC<0時,說明兩車目前處于不是很安全的狀態,需要制動以達到與前車保持一定的安全距離狀態,此時進行ACC控制。
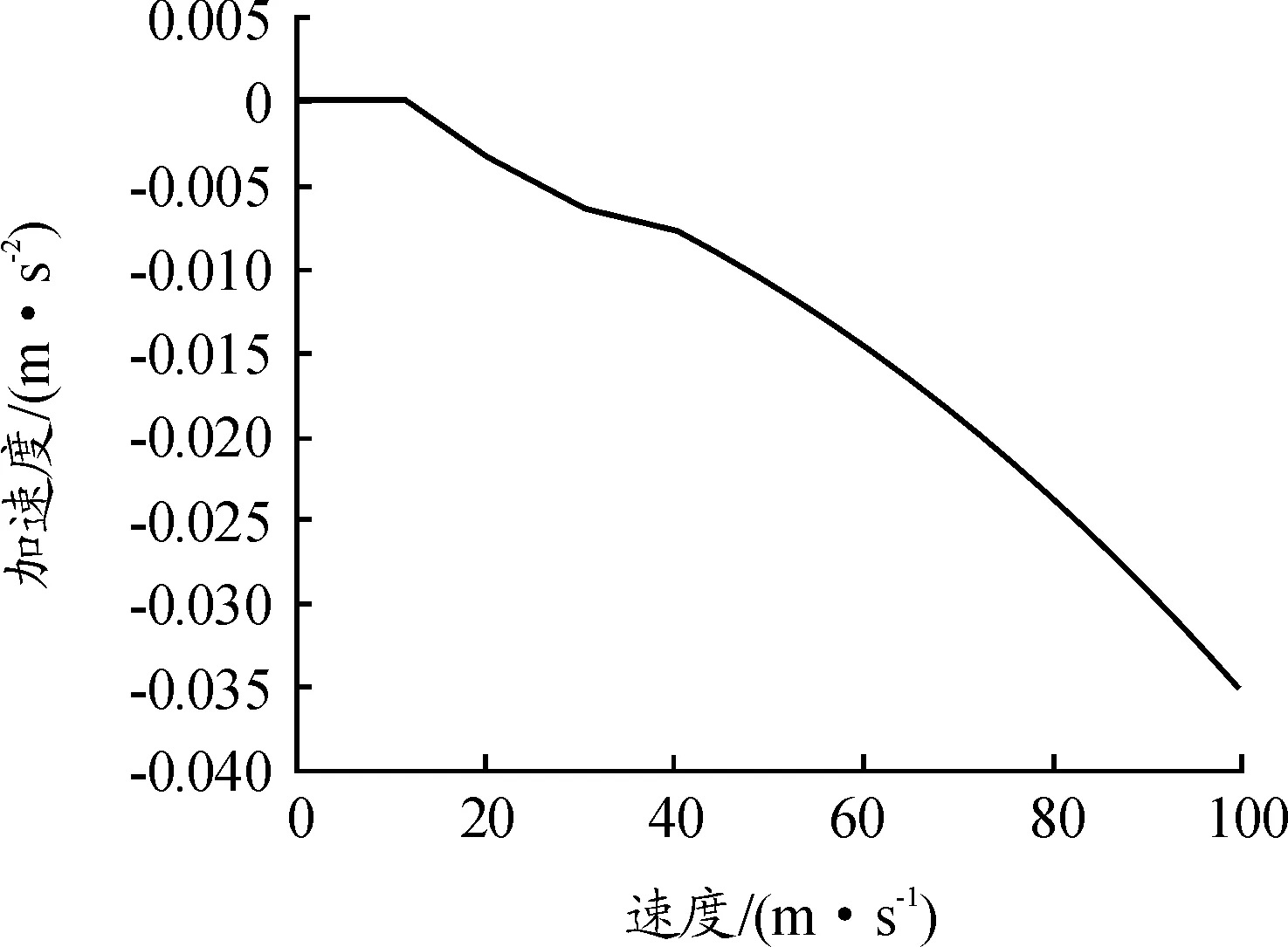
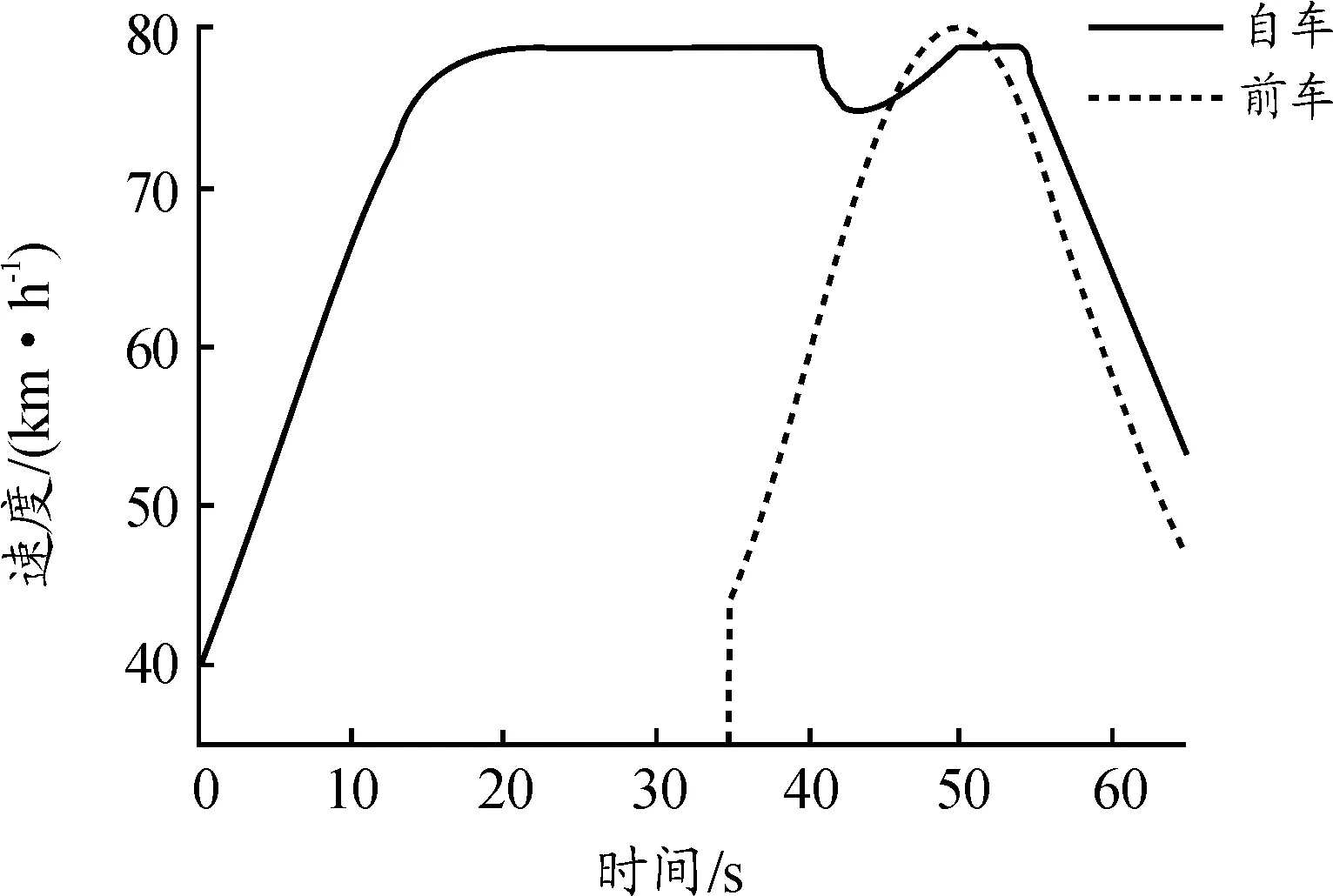
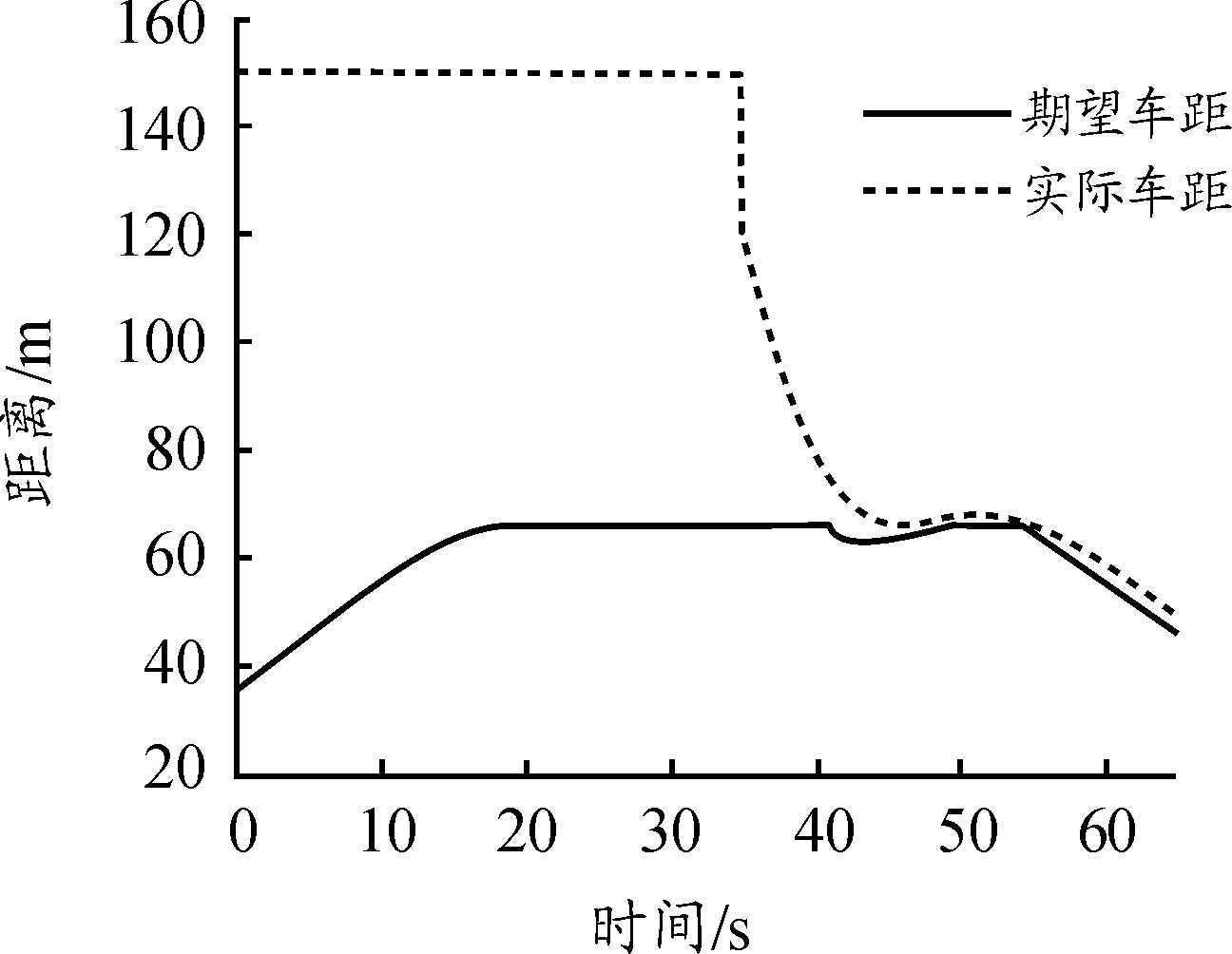
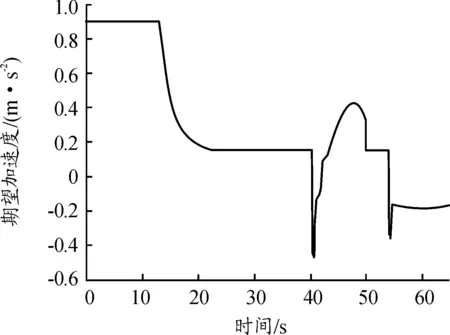
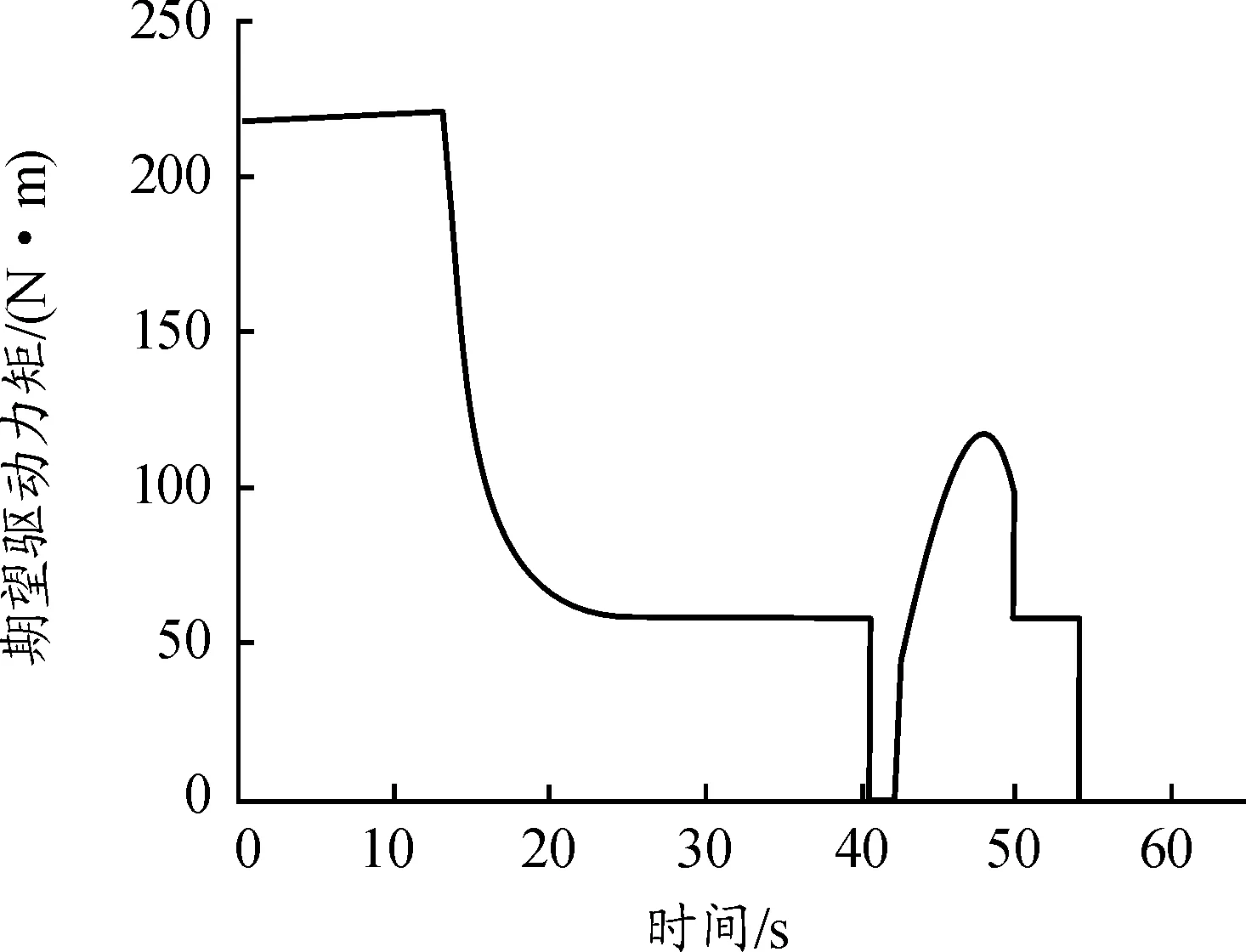
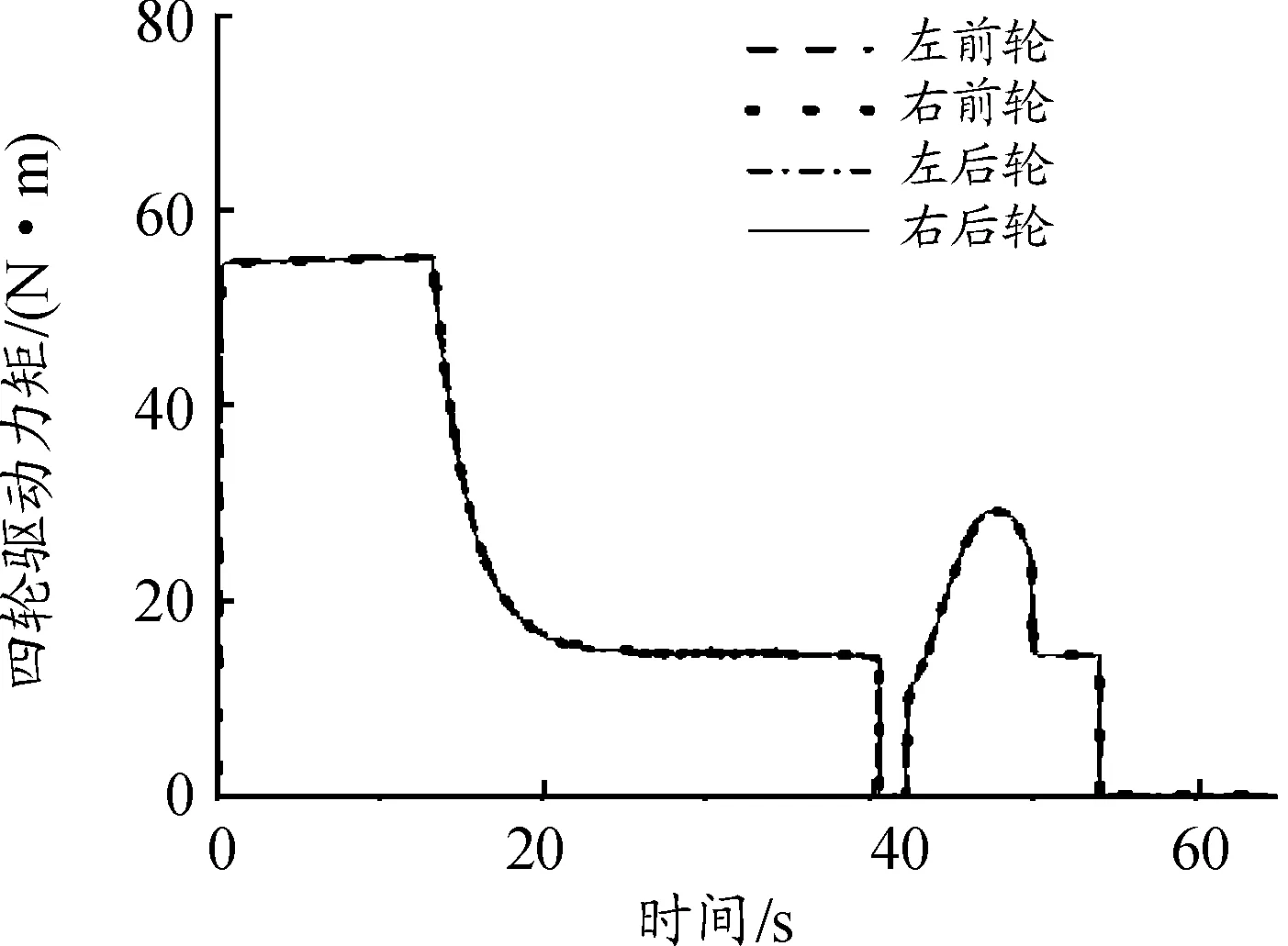
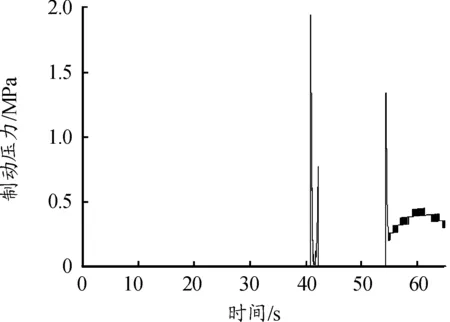
3) 當滿足Ades_ACC>0后,判斷設定車速Vset與前車車速Vf的關系,若Vset 下層控制器是設計出控制分布式驅動電動車的驅動和制動的輸入量,即4個車輪的驅動力矩和制動系統[11]的制動壓力,達到上層控制器所設計的期望加速度。 本文中載體是分布式驅動電動車,縱向行駛由4個輪邊電機獨立驅動,下層控制器根據行駛動力學方程計算電機驅動力矩。 汽車行駛驅動力等于車輛行駛阻力,包括滾動阻力、空氣阻力、加速阻力和坡度阻力[12],表示為: Ft=Ff+Fw+Fi+Fj (16) 其中滾動阻力為: Ff=mgf (17) 式中:m為分布式驅動電動車質量,f為滾動阻力系數,在仿真中道路模型選用路面滾動阻力系數為0.018。 空氣阻力為: (18) 式中:CD為空氣阻力系數,A為車輛迎風截面積,u為受控車輛行駛速度。 仿真工況均為平坦路面,因此,坡度阻力可以忽略不計,即 Fi=0 (19) 加速阻力為: (20) 式中:δ為車輛旋轉質量換算系數,取值為1.2,du/dt為受控車輛的加速度。 由于分布式驅動電動車通過四輪電機驅動,沒有變速器和差速器等傳動器件,忽略傳動比和效率的影響,簡化驅動力為: (21) 式中Tt為四輪總驅動力矩。 綜上所述,將式(17)~(21)代入式(16)中,得到: (22) 每個車輪的驅動力矩Ti采用平均分配原則,公式如下: (23) 制動控制的下層控制器根據期望加速度的大小解算出制動壓力[13],發送給CarSim中的執行器模型,實現制動控制。制動逆模型的制動力矩為: (24) 式中:Tb為下層控制器求解的制動力矩,m為受控車輛的質量,Ades為上層控制器計算的期望加速度,CD為空氣阻力系數,A為迎風截面積,r為車輪半徑,u為受控車輛行駛車速。 最終制動壓力為: (25) 式中,kb為制動增益系數,取值為25。 根據下層控制器可以計算出對應的電機驅動力矩和制動壓力,需要通過設計驅動或者制動的切換邏輯判斷此時應該加速還是減速控制。自適應巡航是一種舒適性功能,過大的加速度變化和頻繁的加減速調節都會使駕駛艙內乘客感到不適,所以合理的加減速切換邏輯對ACC的功能有很大的影響。 將車輛模型初速度設置為100 km/h,4個輪邊電機的驅動力矩設置為0,同時制動壓力也設置為0,聯合CarSim和Simulink仿真得到分布式驅動電動車滑行的怠速曲線,如圖3。 圖3 分布式驅動電動車滑行的怠速曲線 如果直接將滑行曲線作為加減速切換的界限,會導致系統不穩定,影響舒適性和平穩性。為了避免系統過于頻繁的切換,采用設定門限值的方法,給車輛加速和減速的變換提供緩沖的空間。設置門限值主要是為了避免加減速頻繁切換。若超過上門限值之后,則切換到驅動控制,輸出當前下層控制器計算的扭矩值;若降低到下門限值之后,則切換到制動控制,輸出當前下層控制器計算的制動壓力。 若Ades>a+Up,則車輛切換至驅動控制,其中Ades為期望加速度,a為實際加速度,Up為切換加速度的上限閾值,取值0.003 m/s2。 若Ades 綜合工況的設計是前半程無目標車,設置初速度40 km/h,巡航目標車速為80 km/h,后半程距離本車120 m處出現前車,并且前車以42 km/h的初速度加速行駛到82 km/h后減速行駛。 兩車車速隨時間的變化如圖4所示,時間在0~35 s內自車處于巡航模式,車輛以40 km/h的初速度加速到設定期望車速80 km/h后,保持定速行駛,在35 s時刻前車出現在120 m處。可是根據巡航和跟車模式切換邏輯,實際相對距離遠遠大于期望車距時,仍然處于定速控制,隨著兩車慢慢靠近,40 s后開始轉變為跟隨前車行駛模式。當前車車速大于巡航設置車速時,本車不再跟隨前車加速,而是保持最高80 km/h的速度行駛,當前車車速降低后,繼續跟隨前車行駛。 圖4 車速隨時間變化曲線 圖5為實際車距與期望車距的對比,0~35 s前方沒有目標車輛,期望車距與速度有關,18 s后達到飽和值恒定不變,直到40 s后跟車模式計算的期望車距與實際車距維持穩定的趨勢。根據圖4和圖6結果,基本實現平穩控制車速。通過PID控制車速平穩達到期望車速,期望加速度平滑過渡。圖4中顯示40 s時開始減速,對應圖6在該時間段卻有減速度輸出,圖4中35 s目標車出現,但此時由于距離較遠,自車仍處于速度控制模式而繼續勻速行駛,直到40 s時,切換到跟車模式,開始減速。圖6中35~40 s加速度為正值,是由于克服行駛阻力,為保證勻速行駛計算的期望加速度為很小的正值是合理的,所以契合該時間段為勻速過程。 圖5 實際車距與期望車距曲線 綜合工況下的期望加速度和期望驅動力矩變化曲線如圖6、7。 圖6 期望加速度曲線 圖7 期望驅動力矩曲線 由圖可見,2條曲線的變化趨勢一致。在0~15 s,PID算法解算出來的加速度大于飽和值,故保持0.9 m/s2不變,隨后受控車輛車速逐漸增加到設定速度80 km/h,加速度越來越小,直到速度保持80 km/h,加速度才保持穩定。40 s時開始跟車控制,切換為LQR算法解算的期望加速度跟隨目標車。 圖8為四輪驅動力矩曲線,趨勢同期望加速度和期望驅動力矩曲線變化趨勢一致。圖9為綜合工況的制動壓力曲線,在40 s時剛好切換為跟車模式的期望加速度,下層控制器根據加減速切換邏輯最終輸出制動壓力值,55 s后持續制動是由于車速較高,前車減速時要想自車車速迅速降下來需要制動的參與,施加較小的制動壓力是合理的。 圖8 四輪驅動力矩曲線 圖9 制動壓力曲線 設計的上層控制器能夠合理地解算巡航和跟車模式的期望加速度,設計的下層控制器解決了不同模式下所需的驅動力矩和制動壓力的計算問題。提出了巡航和跟車模式切換策略,以及加減速控制切換邏輯,最后通過Matlab/Simulink和CarSim聯合仿真,證明了在巡航和跟車結合的復雜綜合工況下,自適應巡航控制的分布式驅動電動車都能夠平穩、合理地行駛。3 ACC下層控制器設計
3.1 驅動控制器設計
3.2 制動控制器設計
3.3 加減速控制切換策略設計
4 ACC控制策略聯合仿真驗證
5 結論