雙饋風機附加頻率控制對系統調頻動態的影響
2021-10-20 02:12:16張政彭曉濤李少林梁愷許饒琪張銳
電力建設 2021年10期
張政,彭曉濤,李少林,梁愷,許饒琪,張銳
(1.武漢大學電氣與自動化學院,武漢市430072;2.中國電力科學研究院有限公司,北京市 100192;3.合肥陽光智維科技有限公司,合肥市 230088)
0 引 言
雙饋風電機組(doubly-fed induction generator based wind turbine,DFIG-WT)由于采用最大功率跟蹤控制(maximum power point tracking,MPPT)模式,其轉子轉速與電網頻率解耦,不能為系統提供類似于同步機慣性響應特性的動態頻率支撐,因此大規模風電并網會削弱系統慣性,使系統在負荷擾動后產生更大的頻率波動[1-2]。為改善雙饋風機有功頻率響應特性,使風機參與到系統頻率控制中,雙饋風機的附加頻率控制策略得到了廣泛的研究[3-5],其中,利用組合頻率微分和偏差信號實現風機慣性支撐和下垂控制的附加頻率控制,成為改善風電系統頻率響應特性的重要手段。但是這些附加控制在使風機具有頻率支撐能力的同時,也對系統動態特性產生了一定的影響[6-7]。風機與系統通過有功調頻產生相互作用的通道,從而可能使系統調頻動態環節與雙饋風電機組的多物理控制環節發生耦合作用,進而對系統負荷-頻率控制的動態特性產生影響[8-9]。因此,有必要對雙饋風機附加頻率控制給系統調頻動態帶來的影響進行進一步研究。
近年來,已有很多文獻圍繞利用小干擾分析方法針對風機附加頻率控制對系統小干擾穩定性的影響進行了研究。文獻[10]采用阻尼轉矩分析法,分析了雙饋風機采用基于頻率偏差的下垂控制對多機風電并網系統小干擾功角振蕩的影響,以及雙饋風機接入位置和同步機慣性時間常數與下垂控制對系統小擾動功角穩定影響特性的關系。文獻[11-14]則研究了風電虛擬慣量控制對風電并網多機系統小干擾穩定性的影響。其中,文獻[11]通過理論推導和基于DigSILENT仿真的特征值模態分析,研究了工作在MPPT模式下的雙饋風電機組采用附加虛擬慣性控制對四機兩區系統機電振蕩模式的影響;文獻[12]通過時域仿真,借助模式分析法研究了雙饋風電機組采用基于頻率微分反饋和基于變流器控制環節時間常數調整的附加虛擬慣量控制,以及控制策略不同控制參數對風電并網區域系統的發電機主導振蕩模態小干擾穩定的影響;文獻[13]研究了雙饋風電機組鎖相環動態與虛擬慣量控制對風機并網四機兩區系統區間振蕩模態的影響;文獻[14]通過建立考慮鎖相環動態的直驅風電機組虛擬慣性控制模型,針對鎖相環振蕩模態與系統機電模式在復平面分布位置的不同情況,利用特征值分析研究了虛擬慣性控制對系統機電振蕩模式動態特性的影響。但是,用于這些影響研究的系統對象都沒有考慮互聯系統的調頻動態特性,并且在反映風電機組多物理控制環節對系統小干擾穩定動態特性的耦合關系方面,由于考慮側重點不同,并未對風電機組動態進行詳細建模。此外文獻[15]通過建立一次調頻的直驅永磁風電系統小信號模型,基于特征值分析研究了不同風速下風電參與系統一次調頻的小擾動穩定性,但也未研究對多機多區系統調頻動態的影響。
基于上述分析,從分析雙饋風機附加調頻控制對互聯系統負荷-頻率控制動態特性的影響出發,同時考慮風電并網電力系統的運動模態通常由多動態環節耦合作用而成的特點[16-17],本文通過建立詳細描述雙饋風機多物理控制環節耦合特性的狀態空間模型,以及描述互聯系統二次調頻動態特性的數學模型,利用特征值模態和參與因子分析方法,研究風機附加調頻控制對風機參與系統調頻的小干擾穩定動態特性影響,并利用時域仿真驗證理論分析結果的合理性。
1 考慮附加頻率控制的雙饋風機數學模型
1.1 雙饋風電機組數學模型
DFIG-WT是利用雙饋感應發電機(doubly-fed induction generator,DFIG)將風力機捕獲的風能轉換為電能的機組,與傳統同步發電機不同的是,DFIG除定子與電網相連外,轉子也經背靠背變流器與電網相連,其結構如圖1所示。
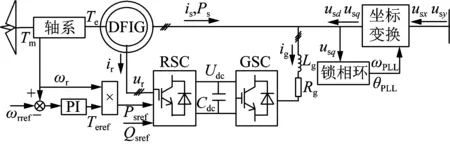
圖1 雙饋風電機組結構圖Fig.1 Structure diagram of a DFIG-WT
DFIG-WT由DFIG、背靠背變流器及其直流環節、濾波電路、軸系等多動態物理環節,以及轉子側變流器(rotor side converter,RSC)控制、網側變流器(grid side converter,GSC)控制、直流環節控制、鎖相環控制、轉速控制等多時間尺度控制環節構成[18]。各物理控制環節的數學模型如圖1所示。圖中,Tm、Te和Teref分別表示風電機組傳動鏈軸系的機械轉矩、電磁轉矩及其參考值;ωrref和ωr分別表示發電機轉子轉速參考值和實際值;Ps和Psref分別表示定子輸出有功及其指令值;Qsref表示定子輸出無功指令值;ir和is分別表示發電機轉子和定子繞組電流;ig表示GSC交流側輸入電流;Udc和Cdc分別表示變流器直流側端電壓和濾波電容;Lg和Rg分別表示GSC交流側濾波電感和電阻;ur表示發電機轉子繞組端電壓;usd和usq分別表示風電機組并網點電壓d、q軸分量;ωPLL和θPLL分別表示并網點電壓的角頻率和相位。
1)DFIG數學模型。
DFIG數學模型由同步旋轉dq坐標系的電壓方程和磁鏈方程組成。考慮感應電機的三相平衡,并不考慮磁鏈飽和效應和零序分量影響,將磁鏈方程代入電壓方程,經整理可建立發電機四階微分方程[19],如式(1)所示。
(1)
式中:urd、urq和ird、irq分別表示RSC交流側輸出電壓和電流的d、q軸分量;usd、usq和isd、isq分別表示發電機定子繞組電壓和電流的d、q軸分量;Rs、Rr分別表示發電機定子和轉子的電阻;Xss=Xs+Xm;Xrr=Xr+Xm;Xs表示定子繞組感抗;Xr表示轉子繞組感抗;Xm表示定子和轉子繞組間的互感抗;ωb和ωs分別表示基準角頻率和系統同步電氣角頻率,且ωs=ω/ωb,當參考坐標系的旋轉速度ω設置為ωb時,同步電氣角頻率與基準角頻率相等;s為ωr與ωs之間的轉差率。
2)變流器控制數學模型。
為實現雙饋風電機組的變速恒頻并網運行,DFIG轉子需采用交-直-交變流器實現交流勵磁控制。RSC根據DFIG輸出有功和無功指令參考值Psref、Qsref,經比例-積分(PI)控制確定轉子d、q軸電流分量參考值irdref、irqref,利用此電流參考指令經PI控制產生用于PWM控制的調制電壓指令urdref和urqref,在為轉子勵磁繞組提供變頻三相交流電壓時,也分別利用q、d軸電壓分量實現定子輸出有功和無功的解耦控制。GSC利用直流環節端電壓控制偏差,經PI控制產生交流側輸入電流d軸分量參考值igdref,利用定子端電壓變化量產生輸入電流q軸分量參考值igqref,再利用此2個電流參考值,經PI控制產生用于PWM控制的調制電壓信號ugdref和ugqref,實現直流環節電容端電壓恒定控制的同時,并可以利用無功調節阻尼定子端電壓變化。上述RSC和GSC控制過程的數學模型分別如式(2)和式(3)所示。
(2)
(3)

3)軸系數學模型。
軸系數學模型用于描述連接風力機和感應發電機的轉子角速度動態變化過程,通常可采用兩質量塊進行建模,其數學模型如式(4)所示。
(4)
式中:ωt為風力機轉子機械角速度;ωr為發電機的轉子轉速;θ為軸系扭轉角度;Ht為風力機的慣性質量常數;Hg為發電機的慣性質量常數;風力機和發電機的轉子之間通過剛性系數為K、阻尼為D的彈簧軸連接。
4)轉速控制數學模型。
轉速控制用于產生定子輸出功率指令,實現風電機組功率跟蹤運行,其動態數學方程如式(5)所示。
(5)

5)直流環節數學模型。
直流環節數學模型主要用于描述電容端電壓的動態變化過程,其數學模型如式(6)所示。
式中:ugd、ugq和igd、igq分別為GSC交流側輸入電壓和電流的d、q軸分量;urd、urq和ird、irq分別為RSC交流側輸出電壓和電流的d、q軸分量。
6)濾波電路數學模型。
濾波電路數學模型用于描述GSC動態調節輸入功率時,GSC交流輸入電流的動態變化過程,其數學模型如式(7)所示。
(7)
7)鎖相環數學模型。
鎖相環主要用于通過跟蹤端電壓相位來實現變流器與交流電網的同步,其同步dq坐標下的數學模型如式(8)所示[6]。
(8)
式中:kp7和ki7是鎖相環的PI控制參數。根據由鎖相環得到的相角θPLL,可將雙饋風機的端電壓由xy坐標系變換到dq坐標系,坐標變換的公式如式(9)所示。
(9)
式中:usx和usy是以αβ靜止坐標系表示的風機并網點電壓。
綜合上述微分方程可知,DFIG-WT模型包括20個狀態變量,分別為[isd,isq,ird,irq,x1,x2,x3,x4,x5,x6,x7,θ,ωt,ωr,x8,UDC,igd,igq,ωPLL,θPLL]。
現代大型風電場包含數量眾多的風電機組,在研究中若采用包含每臺風機及其控制模塊的詳細模型,不僅會増加運算的復雜程度,而且在利用特征值法進行小干擾穩定分析時可能會出現“維數災”的問題。現有研究對這一問題的解決方法是先將風電場聚合等效為1臺或少數幾臺等值風電機組,同時根據研究需要對模型的某些部分進行簡化處理。本文同樣利用聚合法將風電場中多臺風機用1臺等值風電機組代替,同時由于模型總體階數不算太高,出于對模型準確性和計算精確度的考慮,未對風機進行進一步簡化處理。
1.2 風電機組附加調頻控制數學模型
由于雙饋風機利用電力電子裝置并網運行時,其功率跟蹤運行方式使轉子動能與電網頻率變化解耦,無法為頻率擾動提供轉動慣量支撐和頻率調節響應[3]。隨著同步發電機被風電并網替代而退出運行,這種解耦也使電力系統的同步旋轉慣量減少,對頻率擾動時的慣量支撐能力減弱,因此風電機組的調頻控制研究也日益受到關注。利用頻率微分和頻率偏差實現雙饋風機慣性支撐和下垂控制的組合頻率控制是一種典型附加頻率控制方案[5],如圖2所示。該控制策略可使雙饋風機在2種頻率支撐時間尺度上發揮調頻作用,從而改善風電并網系統的頻率響應特性。
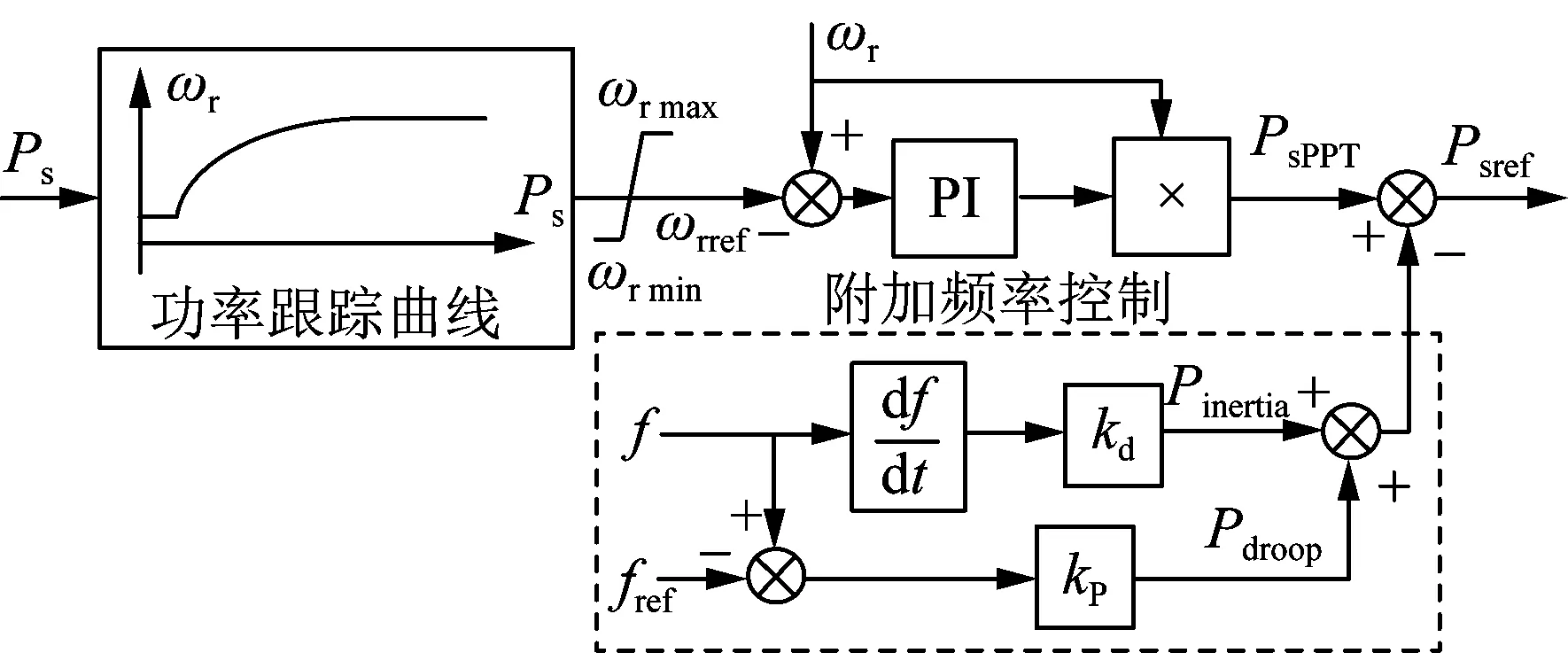
圖2 雙饋風電機組附加頻率控制原理圖Fig.2 Additional frequency control scheme of DFIG-WT
如圖2所示,附加頻率控制策略是根據電網頻率f及其參考值fref的偏差在風電機組功率跟蹤控制指令PsPPT上疊加慣量響應有功指令Pinertia和調頻響應有功指令Pdroop,使風機在頻率變化時能利用變槳減載、超速減載、轉子動能等有功儲備進行頻率支撐的有功調節[20]。其中,Pinertia由頻率偏差微分信號經比例環節kd確定,即:
(10)
Pdroop由頻率偏差信號經下垂控制比例環節kp確定,即:
Pdroop=kp(f-fref)
(11)
數學模型表明附加頻率控制給系統動態特性帶來的影響主要體現在慣性響應的微分環節增加了系統的階數,并通過引入新狀態變量Δf而產生一個新的模態。同時,由于系統狀態空間描述的輸入系數矩陣元素值與狀態變量穩態值有關,采用附加頻率控制后,風機的有功指令值在頻率擾動時與不采用附加頻率控制時不同,因此狀態變量穩態值的不同也會使采用附加頻率控制前后的狀態系數矩陣元素值不同,從而使求解的特征值也不同。
2 無附加調頻的系統調頻動態特性
為進一步分析頻率擾動下的風電并網系統的調頻動態特性,以及風機附加頻率控制對其動態特性的影響,基于1.1節討論的雙饋風機數學模型和等值風電機組建模方法[21],采用MATLAB/Simulink建立含雙饋風機參與互聯電力系統負荷頻率控制調頻動態數學模型,如圖3所示。
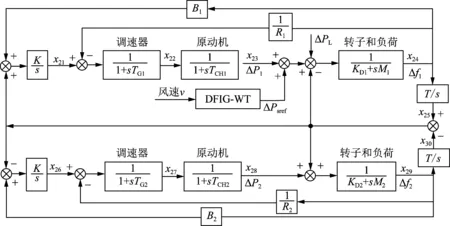
圖3 含風電互聯電力系統調頻控制原理圖Fig.3 Frequency-regulation scheme of interconnected power system with wind power generator
模型中TG和TCH分別表示調速器和原動機一階慣性響應時間常數;M表示同步發電機轉子角動量,等于轉子轉動慣量J乘以同步電氣角速度ω0;KD表示負荷的頻率調節效應系數;B1、B2和R1、R2分別表示系統1、2的頻率調節效應系數和等值發電機的頻率調差系數;K和T都表示比例放大系數。由圖3可見,依據前述風電機組狀態空間模型建立的等值雙饋風電機組接入互聯系統1時,由于互聯電力系統包含x21—x30所示的10個狀態變量,因此圖3所示含風電互聯電力系統共包含30個狀態變量,如表1所示。
圖3中等值同步發電機和等值風電機組出力分別設為500 MW和300 MW,等值負荷設為1 300 MW,互聯系統調頻動態數學模型的相關參數和雙饋風機參數參見附錄A。采用MATLAB/Simulink的Control design toolbox對仿真模型在穩態運行時進行線性化,基于所得系統狀態系數矩陣求解特征值,并利用復數特征值計算相應振蕩頻率和阻尼比,所得系統調頻動態的運動模態分析結果如表2所示。結果表明,系統共有7對共軛復特征根和16個實特征根,分別對應7個振蕩模態和16個非振蕩模態。所有特征值均位于虛軸左側,表明系統調頻動態具有較好小干擾穩定性。
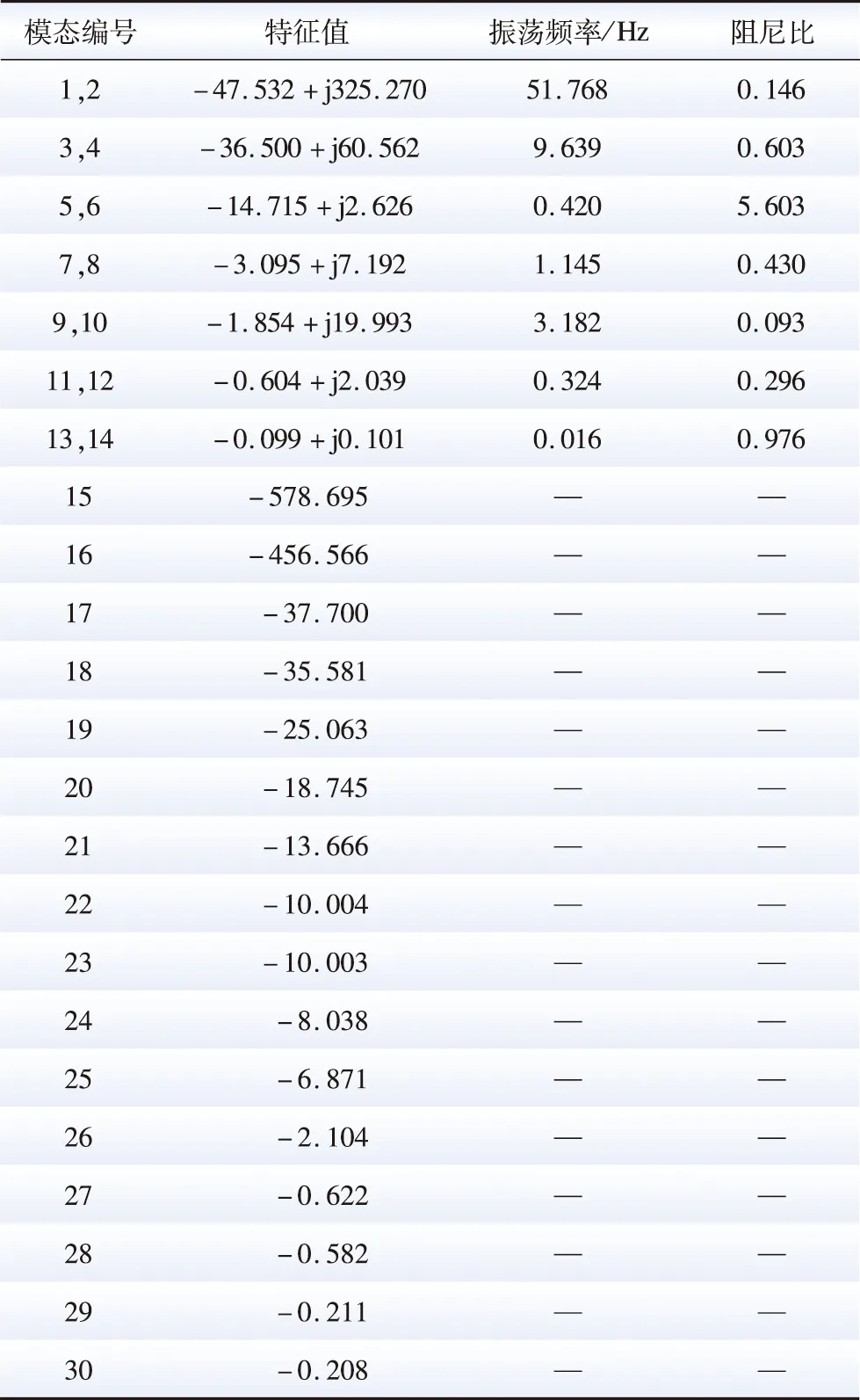
表2 無附加頻率控制時系統調頻動態的模態分析結果Table 2 Modal analysis results of frequency-regulation dynamic of power system without additional frequency control
進一步對各振蕩模態的參與因子進行分析,所得結果如圖4所示。
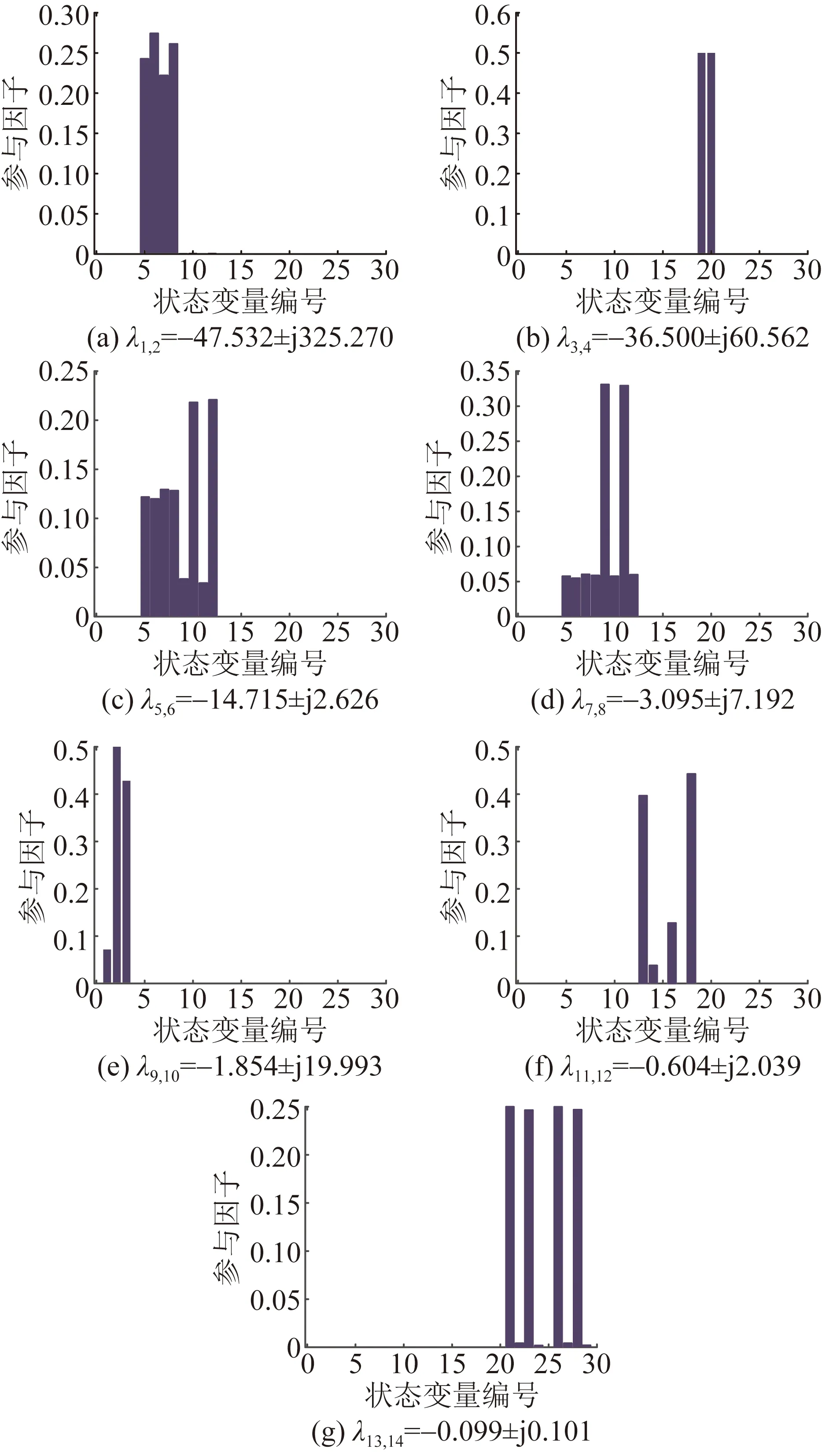
圖4 振蕩模態參與因子分析Fig.4 Participation factor analysis of oscillation modes
由圖4中振蕩模態的參與因子分析可見,λ1,2所確定模態的振蕩頻率是51.768 Hz,雙饋感應發電機的狀態變量[isdisqirdirq]是最大參與因子,表明該振蕩模態由感應發電機轉子和定子電流控制的相互耦合作用產生。λ3,4所確定模態的振蕩頻率是9.639 Hz,狀態變量[ωPLLδPLL]的參與因子分析表明,該模態由鎖相環動態主導。λ5,6和λ7,8的振蕩頻率分別是0.42 Hz和1.145 Hz,根據參與因子分析可知,2個模態分別是由RSC的無功和有功外環控制與感應發電機相互作用主導的低頻振蕩。λ9,10所確定模態的振蕩頻率是3.182 Hz,僅有軸系部分的3個狀態變量[θωtωr]參與,屬于軸系振蕩。λ11,12所確定模態的振蕩頻率是0.324 Hz,狀態變量[x5x6igdUdc] 的參與因子分析表明,該模態由濾波環節、直流環節和GSC相互作用的直流電壓恒定控制產生。λ13,14所確定模態的振蕩頻率是0.016 Hz,是由互聯系統調頻動態相互耦合作用產生。并且風機與系統振蕩模態的耦合作用環節相互獨立,λ1—λ12所確定的6種振蕩模態僅與雙饋風機的狀態變量相關,互聯系統負荷-頻率控制的振蕩模態也僅與調頻動態環節的狀態變量相關,這也表明無附加頻率控制的雙饋風機接入系統,不會對互聯系統負荷-頻率控制的振蕩模態產生影響,并且有功輸出控制與系統頻率變化解耦。對比各振蕩模態的阻尼比可知,系統調頻控制的小干擾穩定動態特性優于雙饋風機的小干擾穩定動態特性。
系統16個非振蕩模態的參與因子分析結果如表3所示。
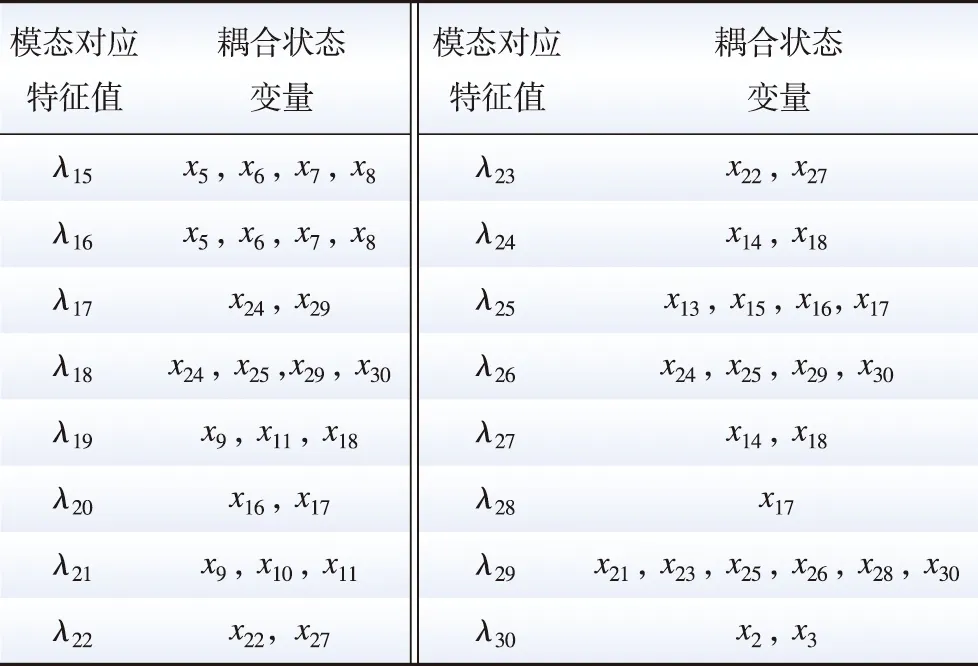
表3 非振蕩模態的參與因子分析結果Table 3 Participation factor analysis of non-oscillation modes
表3中,λ17、λ18、λ22、λ23、λ26和λ29所確定非振蕩模態是僅由互聯系統調頻動態環節主導的模態,而其他非振蕩模態都只與雙饋風電機組的狀態變量相關。分析結果同樣表明,無附加頻率控制的雙饋風機沒有對系統負荷-頻率控制的非振蕩模態產生影響。
根據各模態的參與因子分析的結果,總結了DFIG各組成物理控制環節耦合作用的調頻運動模態,如表4所示。結果表明,感應電機與其他組成部分相比,在振蕩模態和非振蕩模態中的參與程度均較高,分別與51.768、0.42、1.145 Hz的振蕩模態和2個非振蕩模態存在耦合作用。因此在DFIG各組成物理控制環節中,感應電機對系統調頻動態的影響作用最大。
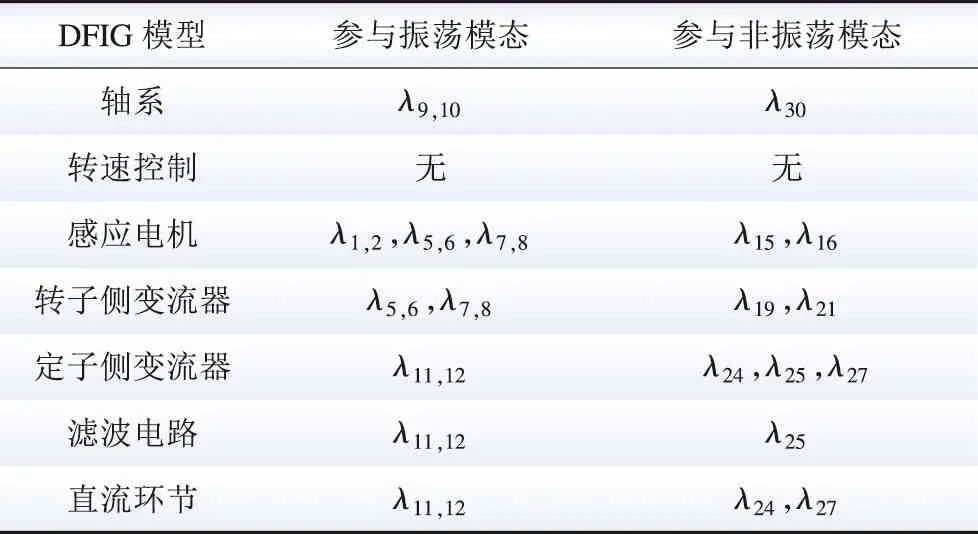
表4 DFIG各組成環節對系統調頻動態耦合作用的情況對比Table 4 Comparison of the dynamic coupling effect of each DFIG component on the system frequency regulation
3 有風電調頻的系統調頻動態特性
3.1 附加調頻控制對調頻動態的影響
將圖3所示仿真模型的DFIG-WT采用圖2所示附加頻率控制,并設5 s時刻等值發電機1的有功負荷增加100 MW,雙饋風機采用附加頻率控制前后系統頻率和風機輸出有功的動態響應如圖5和圖6所示。
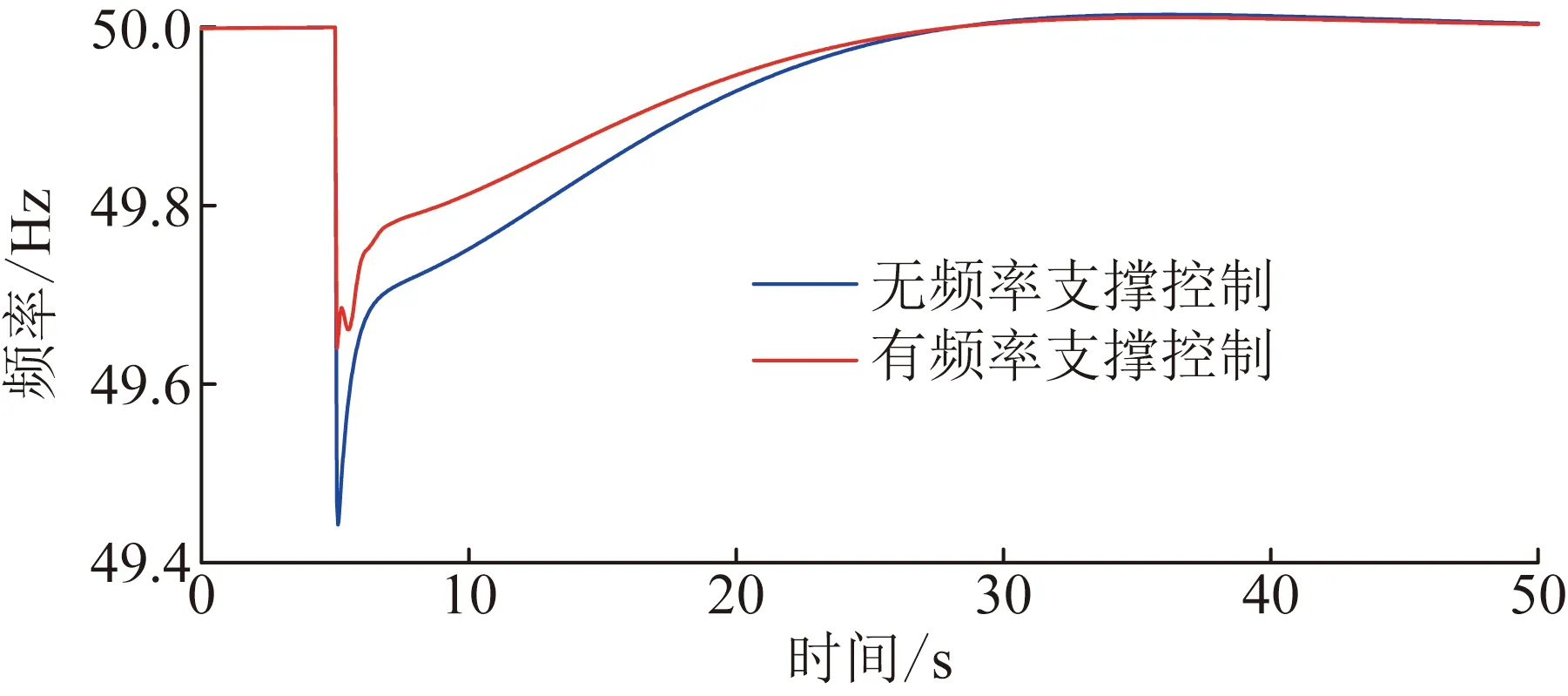
圖5 DFIG-WT采用附加頻率控制前后的系統頻率響應Fig.5 System frequency response when DFIG-WT with or without additional frequency control
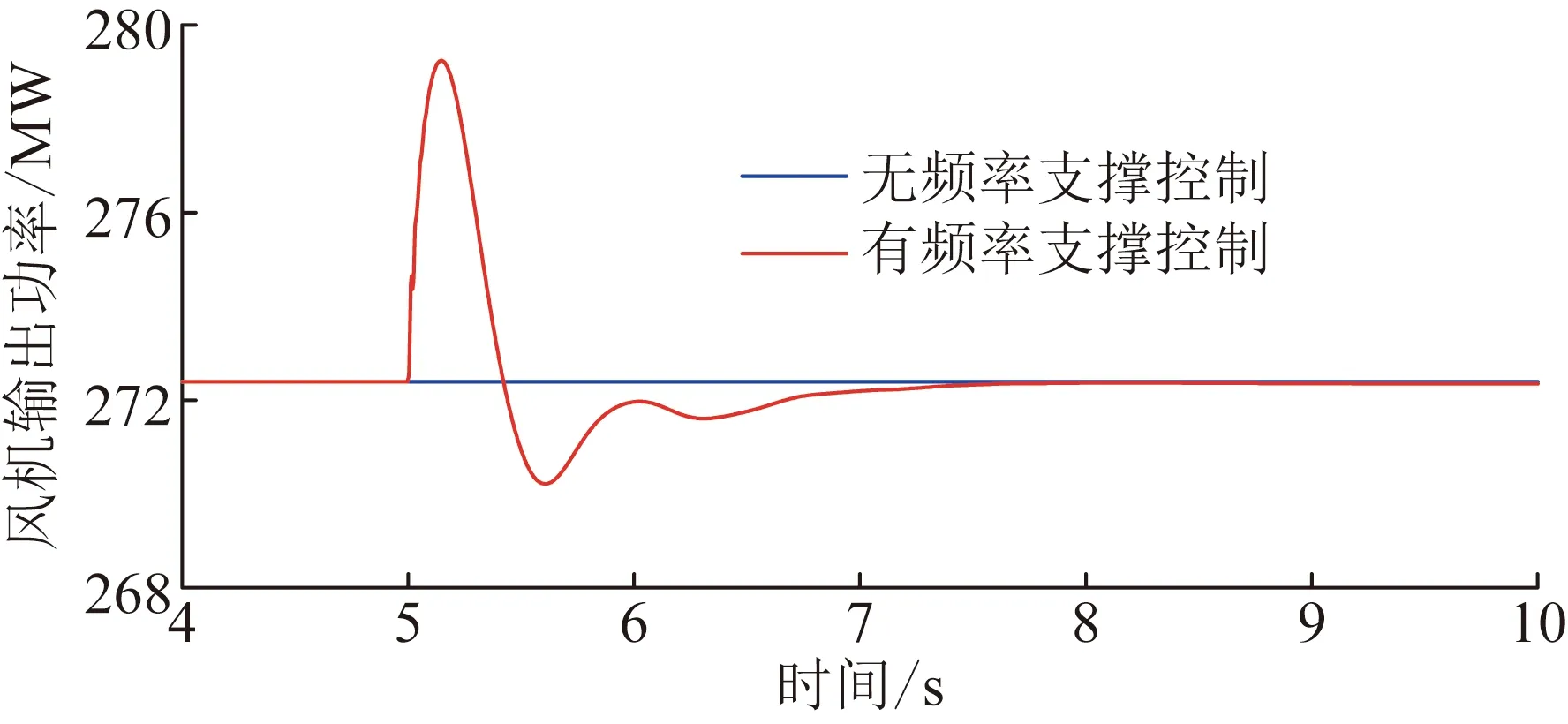
圖6 DFIG-WT采用附加頻率控前后的有功輸出Fig.6 Output power of DFIG-WT with or without additional frequency control
對比結果驗證了附加頻率控制的有效性。圖5的對比表明,采用附加頻率控制后,系統的頻率最低點從48.44 Hz提高到49.62 Hz,系統頻率恢復穩態的動態過程對比說明附加控制在提高系統頻率支撐能力的同時,也能夠優化系統的頻率調節特性。圖6的對比則說明,附加頻率控制能使雙饋風機在頻率擾動期間利用附加調頻有功指令Pinertia和Pdroop增加有功輸出,以提供慣量支撐和調頻響應。
上述系統中,由于附加頻率慣量支撐使系統引入了頻率f作為新增狀態變量x31,因此基于特征值分析得到的運動模態也增加為31個,如表5所示。
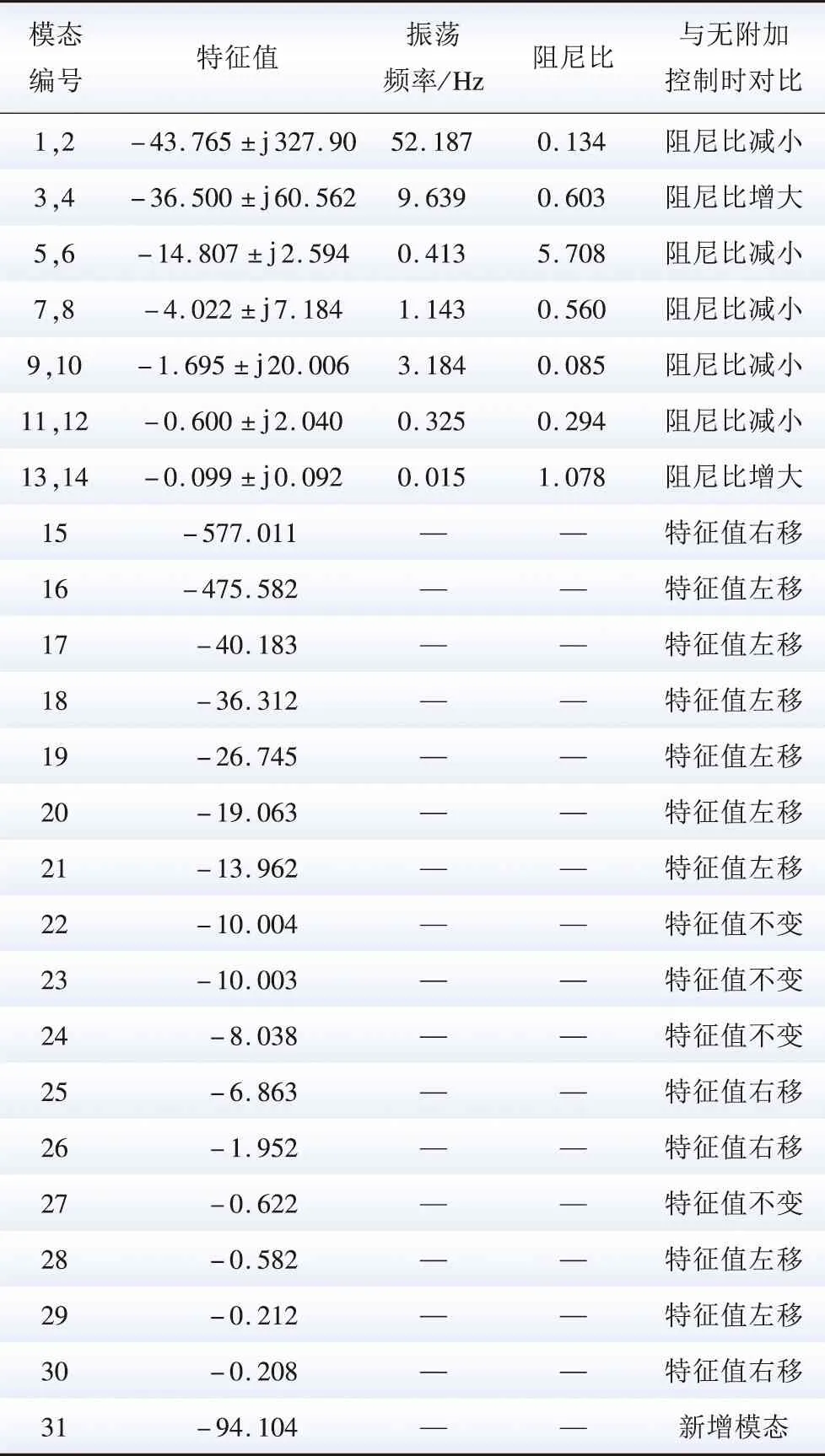
表5 有附加頻率控制時系統調頻動態的模態分析Table 5 Mode analysis results of frequency-regulation dynamic of power system with additional frequency control
與表2相比,風機附加頻率控制的引入使系統負荷-頻率控制動態增加一個特征值λ31=-94.104,并且此特征值在負實軸上離虛軸較遠,其所對應非振蕩模態將不會對系統負荷-頻率控制的小干擾穩定動態特性產生影響。對比其他特征值,采用附加頻率控制后所計算的特征值都在未采用附加頻率控制時的特征值附近,說明附加頻率控制雖然對系統各模態的小干擾穩定動態特性產生影響,但影響程度不明顯。
對各模態進行參與因子分析可確定采用附加頻率控制前后,各模態的耦合作用環節的變化。通過對比2.2節中各模態參與因子的變化可知,λ31、λ7,8和λ17所確定模態的參與因子發生變化。采用附加頻率控制后,上述3種模態參與因子的分析結果如圖7所示。其中,λ31是采用附加頻率控制后新增的模態,由模態的耦合狀態變量可知,該模態由慣量支撐控制、系統1的二次調頻、雙饋感應發電機定子轉子有功電流分量控制相互耦合作用產生。
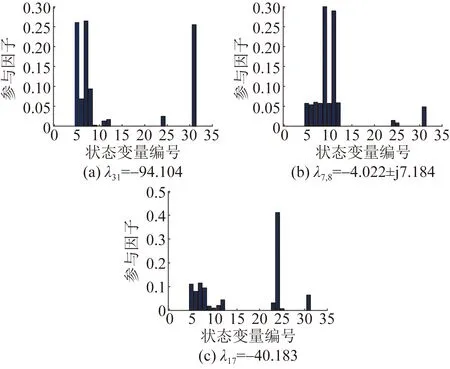
圖7 λ31、λ7,8和λ17的參與因子分析Fig.7 Participation factor analysis of λ31,λ7,8 and λ17
對比圖4和圖7中λ7,8所確定模態的參與因子變化可見,附加頻率控制使系統調頻動態環節與風電機組動態環節發生耦合作用,對比阻尼比變化可知,該耦合作用使雙饋風機的該振蕩模態的小干擾穩定動態特性變差。而λ17所確定非振蕩模態的參與因子表明,x31也具有一定的參與作用,并且該狀態變量使雙饋風機的感應發電機和RSC控制環節參與耦合作用,結合特征值在負實軸的位置變化可知,附加頻率控制提高了該模態的動態穩定性。在其他模態中,因x31的參與因子接近于0,使附加頻率控制在其他模態中沒有使雙饋風機的物理控制環節與系統調頻動態發生耦合作用。圖7仿真結果也同時表明,附加頻率控制使風機對與其電氣聯系較強區域系統的調頻動態產生影響,對電氣聯系較弱系統的調頻動態則影響不大。
3.2 附加調頻控制參數對動態特性的影響
在附加頻率控制中,kd和kp這2個參數不僅會影響慣性支撐和下垂控制的作用效果,而且對風機動態特性也會產生影響,為此,基于參數攝動法進一步研究2個參數變化對調頻動態特性的影響。
分別改變kd和kp研究特征值變化情況,小信號穩定性分析表明,系統特征值在參數大范圍變化時變化情況較為復雜,不僅不同模態對參數變化的敏感度不同,而且不同模態的穩定性變化也不同。圖8分別對比了模態7、8和模態1、2在保持kp=10、kd=1,振蕩頻率和阻尼比分別對kd和kp變化的響應。由圖8可見,模態7、8的阻尼比在kd增加到12.04時減小為0,模態1、2的阻尼比在kp增加到1 327時減小至0,系統在此2種參數作用下達到臨界穩定狀態。分析結果也表明,附加調頻控制參數的變化范圍存在使系統保持穩定的限制。
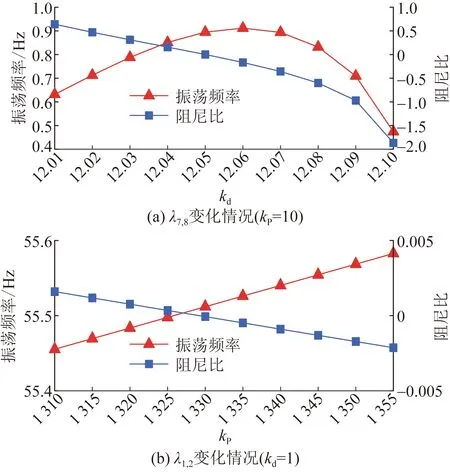
圖8 臨界穩定附近的模態阻尼比和振蕩頻率變化Fig.8 Modal damping ratio and oscillation frequency variation near critical stability
在參數限定范圍內,進一步研究各模態振蕩頻率和阻尼比對kd和kp小范圍變化的響應靈敏度,以明確系統調頻動態特性在參數設定值附近的穩定性。
保持kp=10,令kd以0.1的步長從0.1增加到1,系統7個振蕩模態的振蕩頻率和阻尼比變化情況如圖9所示。
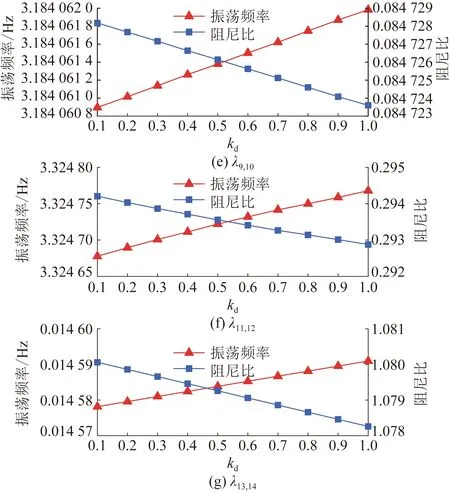
圖9 λ1-14振蕩頻率和阻尼比隨kd的變化Fig.9 Affection of oscillation frequency and damping ratio of λ1-14 with kd change
圖9中,λ1,2和λ13,14所確定振蕩模態的振蕩頻率和阻尼比隨kd增大而分別增大和減小。λ5—λ8所確定振蕩模態的振蕩頻率和阻尼比隨kd增大而分別減小和增大。λ3,4所確定振蕩模態的動態特性不隨kd變化而變化,λ9—λ12所確定振蕩模態的動態特性也對kd變化不敏感。
對于非振蕩模態,選取僅與互聯系統調頻動態環節相關的6個模態,研究kd變化時附加頻率控制對系統調頻動態特性的影響。相關模態特征值變化情況如圖10所示,圖中紅色和藍色叉號分別表示加入附加頻率控制前后的特征值。其中λ17、λ18、λ22、λ23、λ26所確定的模態,其特征值隨kd的增大而向左移動,λ29所確定模態的特征值隨kd增大而向右移動。
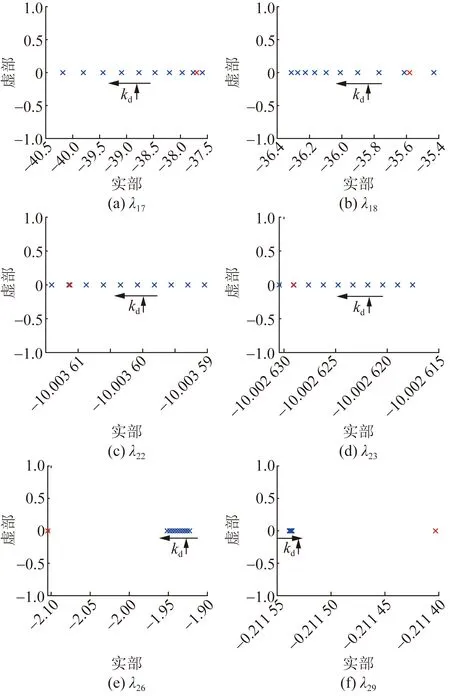
圖10 部分非振蕩模態特征值隨kd的變化Fig.10 Affection of eigenvalues of part of non-oscillation modes with kd change
保持kd=1,kp以0.1的步長從1增加到10,系統7個振蕩模態的振蕩頻率和阻尼比變化情況如圖11所示。圖11中,λ1,2和λ5,6所確定振蕩模態的振蕩頻率和阻尼比隨kp增大而分別增大和減小。λ7,8所對應振蕩模態的振蕩頻率和阻尼比都隨kp增大而增大。λ13,14所確定振蕩模態的振蕩頻率和阻尼比隨kp增大而分別減小和增大。λ3,4所對應振蕩模態的振蕩頻率和阻尼比不隨kp變化而變化。λ3,4所確定振蕩模態的動態特性也不隨kp變化而變化,λ9—λ12所確定振蕩模態的動態特性也對kp變化不敏感。
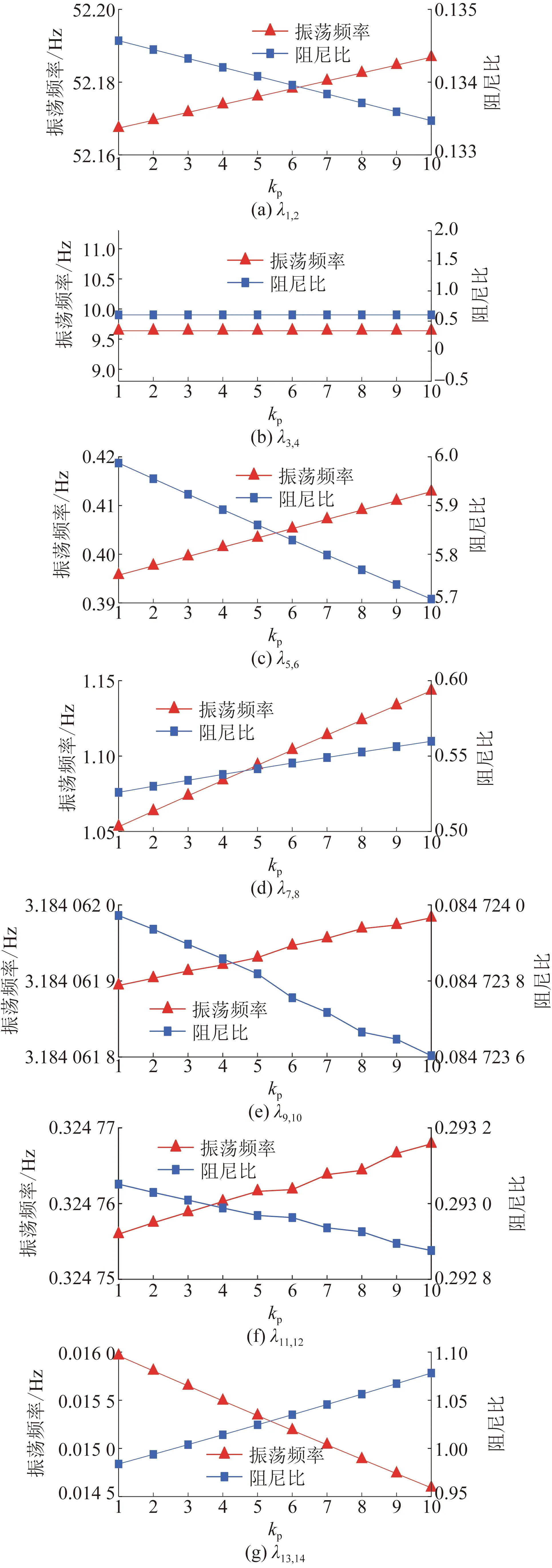
圖11 λ1-14振蕩頻率和阻尼比隨kp的變化Fig.11 Affection of oscillation frequency and damping ratio of λ1-14with kp change
對于非振蕩模態,選取僅與互聯系統調頻動態環節相關的6個模態,研究kp變化時雙饋風機附加頻率控制對互聯系統調頻動態特性的影響。相關模態特征值的變化情況如圖12所示,圖中紅色和藍色叉號分別表示加入附加頻率控制前后的特征值。其中λ17、λ18、λ22、λ23、λ26所確定的模態,其特征值隨kp的增大而向右移動,λ29所確定模態的特征值隨kp增大而向左移動。
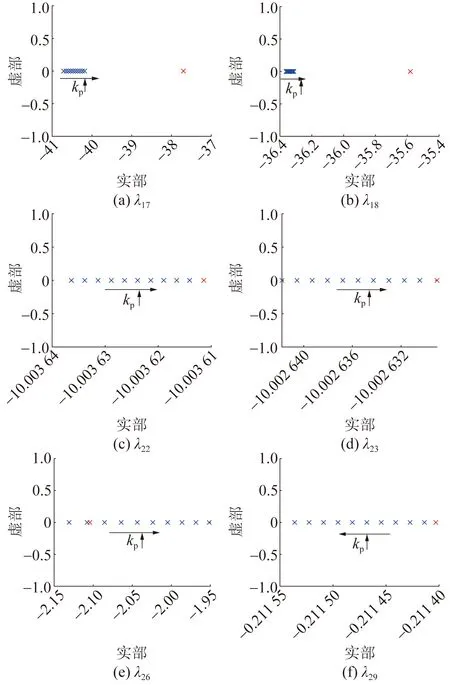
圖12 部分非振蕩模態特征值隨kp的變化Fig.12 Affection of eigenvalues of part of non-oscillation modes with kp change
綜上分析可見,kd和kp的參數變化對λ1,2和λ5,6所確定的雙饋風機振蕩模態、對λ13,14所確定的系統調頻振蕩模態、對λ7,8所確定的雙饋風機和系統調頻動態相互耦合作用振蕩模態,以及部分非振蕩模態的小干擾穩定動態特性都會產生影響。
3.3 時域仿真驗證
分別在kd恒定、kp變化和kp恒定、kd變化2種情況下對圖3所示系統進行時域仿真,并將風機有功輸出與無附加頻率控制時的情況進行對比,仿真結果如圖13所示。在31個模態中,由于λ1,2所確定模態的耦合狀態變量包括定子電流,因此風機輸出有功的動態響應將反映該模態小干擾穩定動態特性對控制參數變化響應。由3.1和3.2節的分析可知,加入附加頻率控制后,該振蕩模態的阻尼比會隨控制參數kd和kp增大而減小,圖13的仿真結果驗證了此動態特性的變化特點。
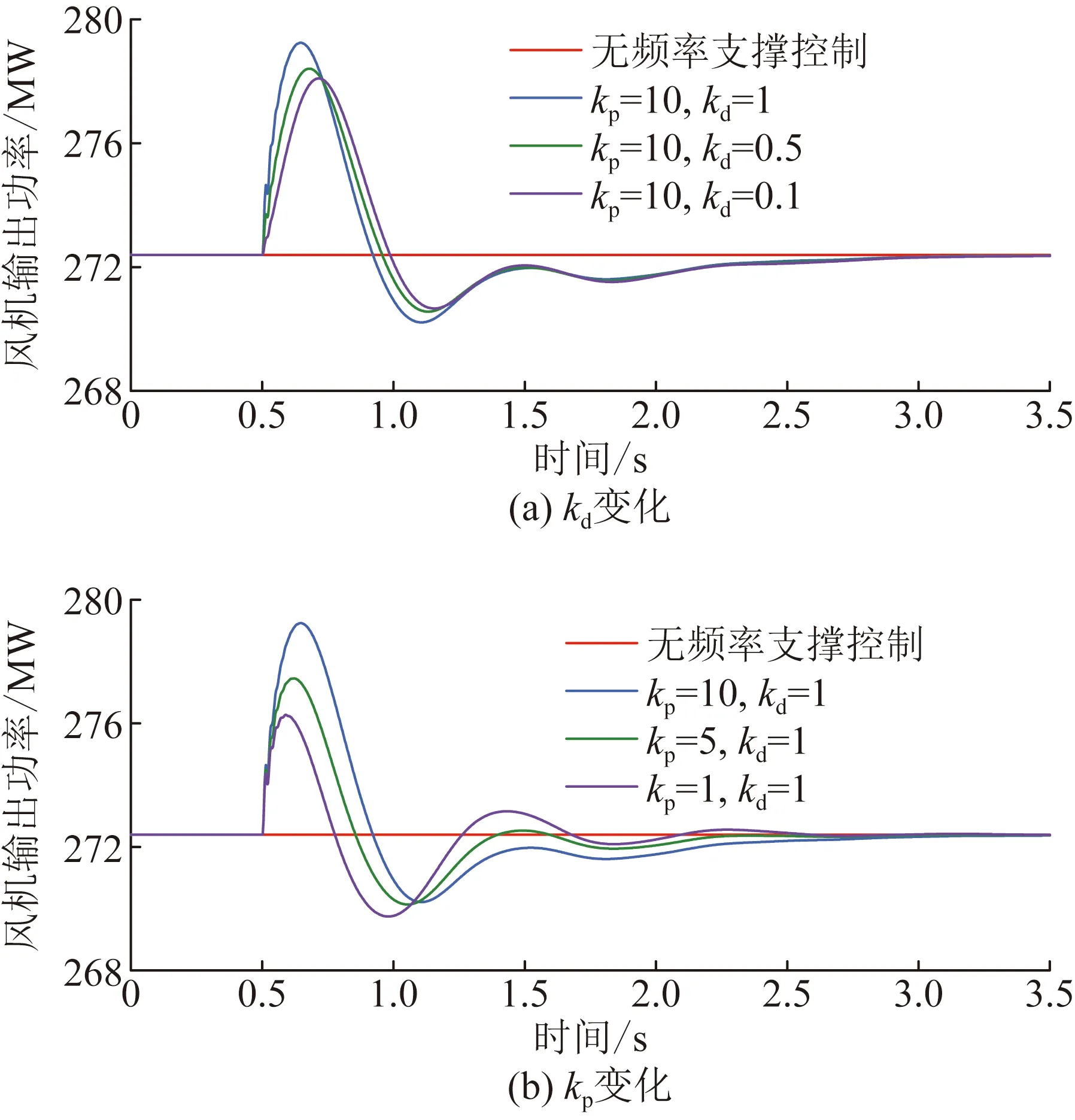
圖13 風機輸出功率動態響應Fig.13 Dynamic response of the output of DFIG
4 結 論
本文主要討論了等值風電機組附加調頻控制對區域系統調頻動態特性的影響。在建立雙饋風機詳細狀態方程基礎上,研究了采用頻率支撐控制風機對互聯電力系統調頻動態特性的影響。基于特征值模態分析和仿真驗證,得到以下結論:
1)含雙饋風機互聯電力系統的負荷-頻率控制包含分別由20個風機內部多物理控制環節和10個系統調頻動態環節耦合作用形成的多個模態,其中包括7個振蕩模態和16個非振蕩模態,并且這些模態都具有小干擾穩定性。
2)由慣性支撐和下垂控制組成的雙饋風機附加頻率支撐控制能有效提高系統的調頻動態特性,將系統受擾后的頻率最低點提高0.18 Hz。雖然頻率支撐控制對系統各模態小干擾穩定動態特性的影響不明顯,但使雙饋風機多物理控制環節和系統調頻動態環節在特征值為-4.022±j7.184的振蕩模態和特征值為-40.183的非振蕩模態上發生耦合作用,并使系統調頻動態增加一個特征值為-94.104的非振蕩模態。
3)在所有振蕩模態中,4個振蕩模態的振蕩頻率和阻尼比對頻率支撐控制的kd和kp參數變化具有較強敏感性,其余3個振蕩模態對參數變化敏感性較弱。同時,部分非振蕩模態的動態特性對頻率支撐控制的參數變化也具有敏感性。
當研究多風場接入系統不同位置時,可先根據電氣聯系強弱對系統進行分區,再分別研究不同區域中風機附加控制對系統調頻動態的影響。同時需要指出,模態分析結論僅針對本文提出的系統模型和運行工況,如何從理論角度將分析結論推廣到其他系統和不同運行工況,是后續研究值得深入開展的工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00