一種基于多操縱面控制分配的IDLC人工著艦精確控制方法
2021-10-21 12:40:10張志冰張秀林王家興史靜平
航空學報 2021年8期
張志冰,張秀林,*,王家興,史靜平
1. 航空工業沈陽飛機設計研究所,沈陽 110035
2. 西北工業大學 自動化學院,西安 710089
艦載機是一種以航母為軍事基地的特殊飛行器,艦載機不但能夠執行對海、陸、空目標攻擊,還能完成預警、偵查、電子對抗等諸多作戰任務。艦載機在賦予航母強大作戰能力的同時,也存在著安全起飛和降落等重大技術難題,特別是在著艦(降落)過程中,受艦尾流擾動、航母甲板運動、人機耦合、光電系統時間延遲等多種不利因素的影響,危險性最強,事故率最高。著艦過程看上去酷炫無比,實則非常艱難且驚心動魄,因而艦載機著艦控制技術[1-3]成為各國航空母艦/艦載機系統發展的一項關鍵和重要技術。
艦載機在著艦時,一般工作在低動壓大迎角階段[4],美軍F-14、F-18等艦載機著艦主要采用Backside操縱方式[5-7],即:使用縱桿控制飛機迎角,油門桿控制下滑;而側桿控制滾轉角,方向舵用于協調荷蘭滾運動。這種傳統的著艦控制方式存在著操縱通道功能耦合、著艦精度不高等多種不利。例如:當飛機存在下滑道負向偏差時,飛行員推油門桿以增加升力、消除下滑道偏差,與此同時升力增加使速度軸向上偏轉,因而迎角減小;為穩定迎角并保持迎角升力,飛行員同時需要拉桿使機體軸向上偏轉,這使得俯仰角也相應增加,因而飛機的油門桿和縱桿通道之間存在著較為復雜的功能耦合關系。這種耦合極大的增加了飛行著艦操縱的身心負擔,特別是在艦尾流擾動作用下,飛行員通常在一次著艦的最后18 s內,需要對飛行姿態進行200~300次調整[5]。
為了提高著艦精度和可靠性,并降低飛行員的身心負擔與培養成本,美國從2014年開始開展艦載機精密進近與著艦增強引導綜合控制技術的研究,簡稱魔毯技術[8-10](Maritime Augmented Guidance with Integrated Controls for Carrier Approach and Recovery Precision Enabling Technologies,MAGIC CARPET)。2016年6月,在“喬治·華盛頓”號航母上對“魔毯”系統進行的598次測試中,只有一次脫鉤情況發生,飛行員們對“魔毯”頗為滿意,它使得駕駛員在著艦前的操作由原來的幾百次減少至10~20次。
魔毯系統有2種工作模式:航跡角速率模式(Flight Path Angle Hold,FPAH)和增量航跡(Delta Path,DP)模式。這2種工作模式之所以能夠大幅降低著艦操縱次數的關鍵在于采用了綜合直接力控制(Integrated Direct Lift Control,IDLC)技術。相比于常規力矩式飛行控制系統通過操縱面改變力矩,間接地對航跡進行調整[6],直接力控制[7-8]通常采用升降舵與襟翼構成一對可平衡俯仰力矩的控制面,直接對作用于飛機的力進行控制,因此可以消除力和力矩的耦合。這樣做的優點在于消除了軌跡運動(速度、航跡角)和姿態運動(迎角、俯仰角速率)的耦合,減小了從操縱到軌跡改變的時間滯后,這對于要求軌跡控制“快、穩、準”的著艦控制十分有利。
中國某艦載機氣動設計采用三翼面布局方式(如圖1所示),除后緣襟翼和升降舵外,前緣機動襟翼、鴨翼也具備一定的大迎角增升能力,特別是鴨翼采用全動式設計,著艦時鴨翼后緣下偏可達20°左右,能夠產生強勁的脫體渦,主翼因此可以獲得額外的升力補充。除此之外,鴨翼正偏同時會產生抬頭力矩,能夠抵消后緣襟翼下偏所產生的低頭力矩,降低對升降舵的配平要求,并在一定程度上減小升降舵上偏所帶來的升力損失。先進的三翼面氣動布局在給直接力控制帶來諸多潛力和優勢之外,也存在一些需要技術上需要解決的難題,比如:① 后緣襟翼、平尾、鴨翼、前緣襟翼均具有增升能力,而平尾和鴨翼也都具有俯仰配平能力,如何根據直接力控制和力矩平衡的要求完成對操縱面的分配與控制是IDLC技術實施需要解決的重要問題;② 某艦載機外側襟副翼設計面積較大,具備相當的增升能力,在功能劃分上不僅要用于增升控制,還要參與滾轉控制,如何實現對襟副翼的協調控制是控制通道解耦的關鍵。這些問題都是IDLC技術實施必須要解決的問題。

圖1 艦載機航模Fig.1 Carrier-based aircraft model
基于以上分析,本文擬開展基于多操縱面控制分配的IDLC人工著艦精確控制方法研究,主要目標有3個:① 對MAGIC CARPET系統著艦過程的控制特點進行分析,基于此提出一種解耦設計的IDLC控制律結構;② 基于三翼面布局飛機的特點,提出基于多操縱面控制分配的IDLC控制方法;③ 通過數字仿真驗證基于多操縱控制分配的直接力控制方法的有效性,并對比分析該方法相對于常規控制著艦的優點。
1 MAGIC CARPET系統功能分析
1.1 MAGIC CARPET系統著艦過程
MAGIC CARPET系統是美國海軍開發的一套艦載機機載輔助著艦系統,它主要涉及著艦平視指引顯示(Head-up Display,HUD)、綜合直接力控制、飛行軌跡角速率控制、飛行軌跡增量控制、迎角恒定的動力補償控制等幾項關鍵技術。該系統就像是為艦載機飛行員配備的“專職副駕駛”,可以利用一系列飛行控制算法,對飛機的高度、速度、風速、進場的角度等因素進行計算,綜合判斷出最合適的條件,并導引飛行員執行它所建議的降落程序。如圖2所示,基于MAGICCARPET的艦載機著艦系統工作過程[5,11]可描述如下:

圖2 基于魔毯技術著艦的基本結構Fig.2 Basic structure of landing based on MAGIC CARPET technology
1) 當艦載機處于航母后方接收到交通管制中心的著艦許可之后,艦載機首先按照規定完成等待航線,然后直線進入等待區的馬歇爾點,向航母靠近,如圖3所示。整個過程中飛行員需要不斷調整飛機的姿態和高度,在此階段艦載機處于常規力矩式控制方式。

圖3 艦尾等待航線與進場航線Fig.3 Stern holding route and approach route
2) 當飛機距離航母約10海里(1海里=1 852 m), 高度位于400 m左右,艦載機轉為著艦構型,飛行員放下襟翼、尾鉤和起落架,接通IDLC控制模式。IDLC包含FPAH和DP 2種工作模態[8-9],當桿位移處于±1~±2 inches(1 inches=2.54 cm)之間時,控制系統處于FPAH工作模態,此時飛行員根據菲涅爾透鏡光學著艦系統(Imprived Fresnel Lens Optical Landing System,IFLOLS)引導、慣導系統計算出來的航跡角,來進行航跡角速率的控制[8-9];當桿回中時飛機的航跡角速率為0,航跡角保持不變。若桿位移大于±2 inches,意味著飛行員需要對飛機進行較為緊急的操縱,控制系統將自動切出IDLC模式,轉為常規力矩式控制模式。
FPAH模態工作時,飛機的俯仰角和航跡角會以相同的速率進行改變,能夠讓迎角始終保持在基準配平值,而迎角保持有利于對下滑道的快速修正。
3) 當飛機在距離航母約6海里處,飛行員進行著艦檢查,在距離航母約3海里處捕捉到下滑窗口,直接進行下滑著艦,此時IDLC控制處于DP模態,桿位移處于±1 inches之內。
DP模態僅在著艦的下滑階段接通,該模態根據飛機當前速度、迎角、下滑引導參考路徑和航母運動速度,自動計算出駕駛桿處于中立位置時的參考航跡角(通常處于3.5°~4°,風很大時為4°),而桿位移與飛機航跡角相對于參考航跡角的偏差相對應。當IFLOLS的“肉球”偏離基準光心時,表明飛機偏離基準下滑道,飛行員根據“肉球”偏離基準光心的大小和極性,完成下滑軌跡的修正,如圖4所示。
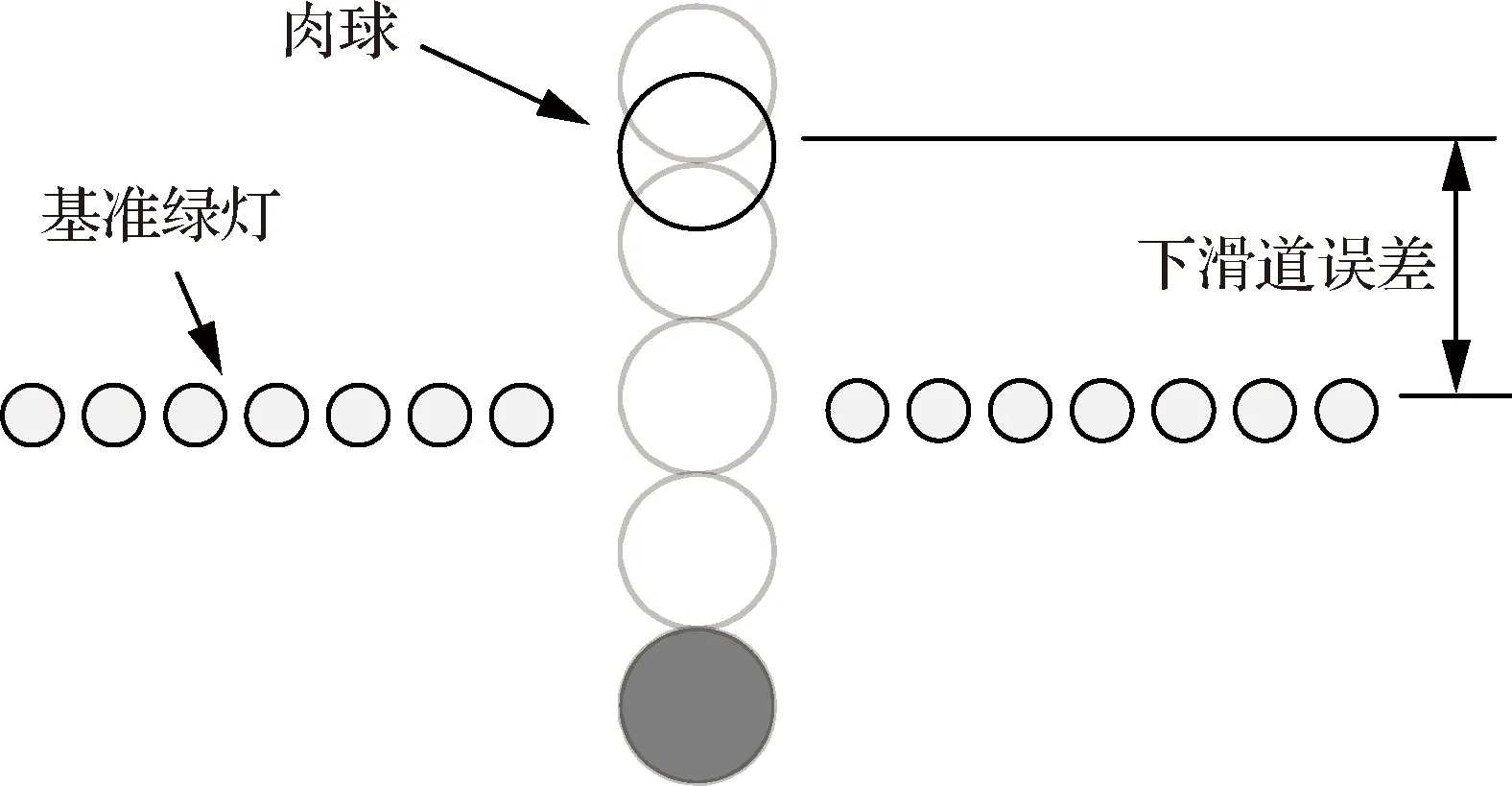
圖4 IFLOLS“肉球偏差”Fig.4 IFLOLS “Meatball Deviation”
1.2 MAGIC CARPET系統著艦過程分析三翼面氣動布局飛機IDLC技術實施分析
分析IDLC對于飛機縱向控制的特點不難發現:IDLC對于著艦下滑迎角的保持、力矩平衡的控制是由IDLC控制律自動完成的,而油門桿也可以處于自動控制狀態。MAGIC CARPET雖然是一種人工著艦控制系統,但它在底層呈現出了隱藏式的自動控制策略,具備高度的輔助駕駛功能,因而能極大地降低了飛行員的負擔。從這一角度來看,MAGIC CARPET可以視為是一種半自動的著艦控制技術,IDLC是這種著艦控制技術的核心。IDLC系統設計涉及艦尾流建模與抑制[12-15]、直接力控制[16-20]、甲板運動預測與動力補償[21-23]、參考航跡角計算等環節,其中直接力控制是FPAH模態和DP模態控制律設計的基礎,是艦尾流抑制的關鍵,受篇幅限制本文主要對基于多操縱面控制分配的直接力控制技術進行介紹。
直接力是指直接產生按照愿望改變軌跡的力,不同于常規的力矩控制方法,直接力控制方案直接地對作用于飛機的力產生影響,因此可以消除力和力矩的耦合,從而消除軌跡運動和姿態運動的耦合,達到減小滯后時間的目的。因此解耦控制方法是實現直接力控制的關鍵。為了在工程上實現基于直接力的精密航跡控制,應具備如下2方面的要求:
1) 飛機應具備一對或多個滿足直接力控制的操縱面,以配平力矩并產生凈升力,從而實現對飛機縱向的直接力控制。
2) 在理論方法上應找到一種能夠便于工程應用,并能夠實現解耦控制的方法,以實現飛機姿態與航跡的解耦,從而消除軌跡運動和姿態運動耦合。
根據上述分析,本文對相關工程對象進行了分析,采用如下技術途徑實現上述設計要求:
1) 操縱面功能分配:通過鴨翼、前緣襟翼、后緣襟翼、襟副翼、與平尾構成一組能夠實現飛機縱向直接力控制的控制面。實施時,前緣襟翼、后緣襟翼、襟副翼聯動下偏,改變整個機翼的彎度,從而產生主要的升力貢獻。考慮到該工程對象采用全動式鴨翼設計,鴨翼后緣下偏可達20°左右,產生的脫體渦能夠增加主翼的升力,因此當切入著艦構型時,根據載荷情況使鴨翼與上述操縱面聯動下偏至預偏角,以增加升力。而平尾向上偏轉產生抬頭力矩來抵消上述操縱面偏轉產生的低頭力矩。
特別需要指出的是:鴨翼正偏的同時會產生抬頭力矩,因而也能夠抵消升力增加所產生的部分低頭力矩,降低對升降舵的配平能力要求,并在一定程度上減小升降舵上偏所帶來的升力損失。該組合方式可以在現有飛機上進行改裝升級,即有針對性的對這些控制面的氣動特性進行深入研究,設計直接升力控制方法并借助于飛行控制計算機(FCC)對直接升力進行輔助控制。
2) 解耦方法選擇:特征結構配置(Eigen-structure Assignment,EA)與動態逆方法是2種典型的可用于解耦設計的控制方法[19],二者都具有較好的解耦控制能力。考慮到非線性時變的動態逆控制律結構在工程化實施時不易與現有飛控系統相結合,本文采用特征結構配置方法進行解耦設計。特征結構配置方法通過特征向量與極點配置來實現對飛機縱向運動短周期模態(迎角、俯仰角速率)與長周期模態(航跡角、速度)的解耦,非常便于直接力控制的實現;并且這一方法在控制律形式上呈現出比例控制的特點,也特別容易工程化應用。
2 基于EA的直接力解耦設計
本文提出的基于多操縱面控制分配的IDLC控制系統結構如圖5所示,除典型IDLC著艦系統所包含的FPAH控制、DP控制、迎角穩定與力矩平衡控制、基于迎角恒定的動力補償控制等功能模塊外,在系統內環還設計了一種具有解耦功能的EA調節器。其目的是通過內環EA調節器設計將飛機的自然特性調整為滿足一級品質、且長周期變量與短周期變量解耦的特性。

圖5 IDLC控制系統結構示意圖Fig.5 Structure diagram of IDLC control system
對于飛機縱向運動,在給定任意初始狀態和輸入時,描述飛機縱向運動變量V(t)、α(t)、q(t)、θ(t)的響應均可以寫成模態的線性組合的形式:
x(t)=C1e-σ1tsin(ω1t+α1)+
C2eσ2tsin(ω2t+α2)+M
式中:e-σ1tsin(ω1t+α1)和eσ2tsin(ω2t+α2)分別表示縱向運動長周期模態和短周期模態;系數C1、C2反映了長、短周期模態對該變量影響大小。如果能夠通過EA設計實現長、短周期模態解耦,即意味著在短周期變量α(t)、q(t)響應表達式中的系數C1極小,因而長周期變量V(t)受到艦尾流擾動或油門桿輸入作用,對短周期變量α(t)、q(t)的影響較小。反之,短周期變量受到擾動或輸入作用,對長周期變量的影響也很小。
艦載機下滑著艦時,IDLC系統工作要求迎角能夠穩定保持在預設參考值(8.1°~9.1°),而速度也處于恒定控制狀態。因而EA調節器的這種解耦控制能力十分有助于油門通道與縱桿通道的解耦設計。此外,不論是FPAH模態,還是DP模態,當桿回中時,EA調節器仍具有抑制艦尾流擾動、穩定飛機下滑狀態的特性。基于上述原因,本文采用EA調節器進行飛機自然特性的調整。
下面對EA調節器的解耦控制、基于多操縱面控制分配的直接力控制技術進行介紹。
2.1 EA調節器設計
特征結構是系統的特征值、特征向量的統稱,通過特征結構配置,可以使系統達到預定的性能要求,并實現模態之間的解耦[24-25]。
設線性時不變系統的狀態方程為
(1)
式中:rank(B)=m,rank(C)=r,x∈Rn,u∈Rm
Moore的研究表明[3]:若系統可控,且所配置的特征向量滿足下列條件時:

3)vi∈span{Nλi}.
可求得反饋增益矩陣K。
2.2 求解反饋增益矩陣
假設反饋形式為
u=Ky
(2)
則閉環系統為

(3)

則原系統可變換為

(4)

線性變換前后,系統的特征值不變,特征值λi的特征向量變為
(5)
根據特征根與特征向量的關系有
(6)
即為
(7)

(8)

相應地,I與A也可分塊如下:
(9)
根據分塊矩陣運算規則,從式(9)中取第一行等式可得
(10)
即為
(11)

式(11)等效變換為
同理,對于其他期望特征值λ1,λ2,…,λr及對應的可達特征向量有
?
總的表達式可寫為
(12)

由式(12)可得反饋增益矩陣為
(13)
2.3 特征向量的可配置性


圖6 可達特征向量的幾何解釋示意圖Fig.6 Geometric interpretation of reachable
(14)
由于可達到的特征向量必須屬于所需子空間,因此
(15)
(16)
根據標量函數對向量與矩陣的微分運算,可得
(17)
若?J/?zi=0,則有

(18)
(19)
2.4 飛機縱向運動模態解耦設計
系統的特征值決定了系統的穩定性與響應速度;系統的特征向量決定了該系統的各個模態之間的耦合關系及耦合程度。因此預置合適的閉環特征向量是實現解耦的關鍵。對于已選擇好的特征值,只要使特征向量中需要解耦的模態所對應的元素為零,就可以得到滿足解耦要求的設計結果。對于飛機縱向運動,為使短周期模態和長周期模態間實現解耦,以達到短周期模態不影響前飛速度,長周期模態不影響迎角,特征向量可按如下方式配置:

其中:×表示該處可取任意值,但該向量不一定可達。
依照式(13)計算輸出反饋矩陣K,特征結構配置只可精確配置r個特征值及其對應的特征向量,其中每一特征向量中至多可以有m個指定元素。若要提高特征向量的可配置性,需增加B陣的秩,此時需增加控制變量個數。若想對m以上元素進行精確配置,需增加輸入控制量的維數。
本文基于V(t)、α(t)、q(t)、θ(t)狀態反饋進行特征結構配置,因此r=rank(C)=4,可對縱向4個特征值進行配置,采用平尾和襟翼2個控制面作為控制量,因此m=rank(B)=2,可將每個特征向量的2個元素指定為0進行解耦設計,求解的反饋矩陣KEA∈R2×4。
3 基于三翼面飛機的多操縱面直接力控制分配設計
艦載機著艦時,后緣襟翼等操縱面下偏,艦載機轉為著艦構型。對于三翼面布局飛機而言,為增加著艦升力,鴨翼、前緣襟翼、襟副翼也將與后緣襟翼一起聯動下偏,因此IDLC控制分配模塊解算的輸出是各個操縱面相對于下滑配置值的增量值,如圖5所示。設鴨翼、前緣襟翼、后緣襟翼、襟副翼的下滑著艦配置值以及平尾配平值分別用δc0、δLEF0、δf0、δea0、δe0表示,相應的各個操縱面控制分配模塊輸出的增量值用Δδc、ΔδLEF、Δδf、Δδea、Δδe表示,則各個舵面執行器總的輸入可表示為
(20)

(21)
控制分配方法采用模塊化的設計思想進行操縱面的控制分配設計,如圖7所示,在以該結構進行控制系統設計時,控制律的輸出表征了飛機運動對于期望直接力或力矩的需求,而分配律則根據操縱面偏轉量與期望直接力或力矩的關系求解出各個操縱面的偏轉角指令。雖然采用特征結構配置方法可以實現基于平尾和襟翼的解耦控制,但對于需要利用前緣襟翼、鴨翼進行復雜協調的著艦控制,控制分配結構更有利于對于操縱面控制方式和組合方式的調節。采用控制分配構型的優點在于:不需要考慮控制律設計的問題,只需要關注如何將控制律所要求的虛擬控制量最優地分配給控制面,這一做法簡化了控制律的設計,在操縱面出現故障或損傷時, 易于重新進行控制作用的劃分, 提高了系統的可靠性。
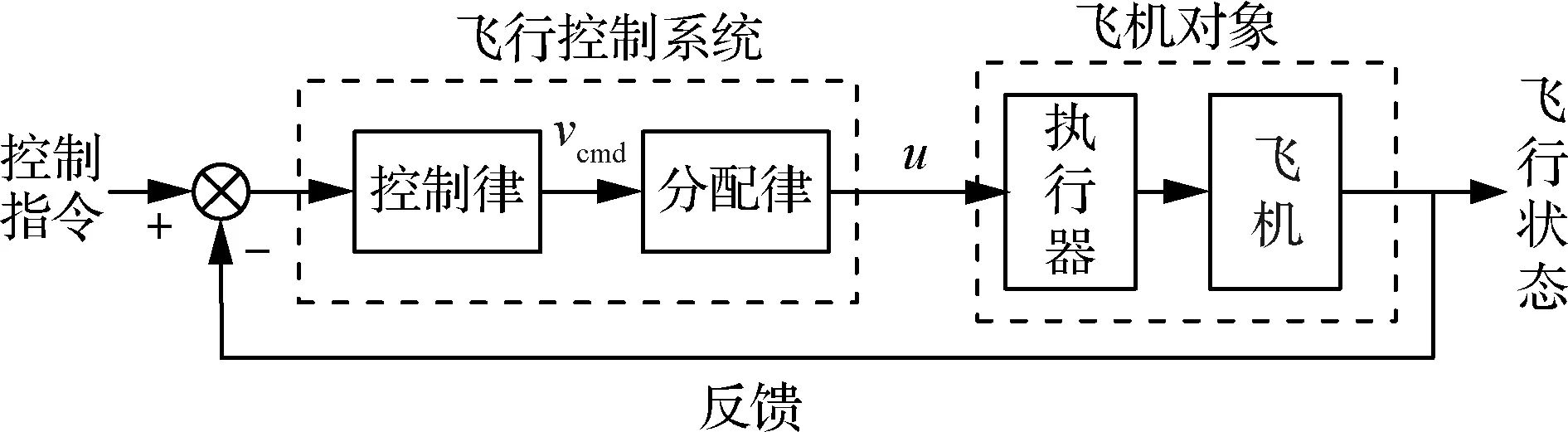
圖7 模塊化飛行控制系統框圖Fig.7 Block diagram of modular flight control system
對于圖5所示的IDLC系統結構,控制分配模塊的輸入由FPAH控制律、DP控制律、迎角穩定與力矩平衡控制律的輸出確定。FPAH控制律和DP控制律,其輸出反映的均是修正下滑道偏差所需要的直接升力增量,可用ΔvL表示。簡單起見,采用PID方法設計FPAH控制律和DP控制律,對著艦控制分配問題進行描述。
1) FPAH模態控制律
(22)
2) DP控制律
(23)
3) 迎角穩定保持控制律
Kqq-KvLΔvL
(24)
總體來說,迎角穩定保持控制律反映了下滑著艦對俯仰操縱力矩的需求,可用Δvm表示。
除上述因素外,控制分配設計還需要考慮襟副翼功能復用的問題,滾轉通道的控制也需要有襟副翼,設下滑著艦對滾轉操縱力矩的需求用Δvl表示。
綜上所述,艦載機下滑著艦縱向控制需重點考慮對直接升力、俯仰操縱力矩、滾轉操縱力矩的需求。令虛擬控制量v等于
v=[ΔvL,Δvm,Δvl]T
則下滑著艦直接力控制分配問題可描述為:已知v(t)∈R3,及映射Be:Rm→R3(m≥3),求解不定方程:
Beu(t)=v(t)
(25)
使控制變量Δu(t)在不超出控制約束的前提下滿足下滑著艦的性能指標。
對于本文所研究的三翼面布局飛機,控制變量Δu(t)表達式為
相應地,控制效能矩陣描述為
(26)

至此,便完成了三翼面飛機多操縱面直接力控制分配的建模。現有控制分配問題求解方法如:直接分配法、偽逆法、面搜索法、線性規劃等方法均可用于直接力著艦控制分配問題的求解。其中,偽逆法工程實施簡單易行,簡便起見下文采用偽逆法進行分配求解示例。當采用偽逆法進行分配求解時,操縱面輸出為
(27)
4 仿真分析
根據本文提出的基于多操縱面控制分配IDLC艦載機人工精確控制方法,搭建某三翼面布局飛機非線性六自由度仿真模型,完成方法的有效性驗證。
4.1 基于EA的解耦控制
選擇高度H=300 m、V=70 m/s、后緣襟翼δf=20°作為基準狀態對飛機進行配平,依據式(21)選擇平尾和襟翼作為控制變量,線性化得到飛機縱向運動小擾動方程為


求得其短周期、長周期的特征根分別為
相應的特征向量為

分別給定Δα=5°,Δθ=5°的初始擾動,系統分別在短周期變量擾動和長周期變量擾動作用下的狀態響應曲線如圖8所示。從響應結果看,飛機縱向自然特性呈現出長短周期模態強耦合的特征,任一變量受到初始擾動,都會使其他變量受到較強擾動。

圖8 短周期和長周期干擾對系統狀態的影響Fig.8 Influence of short period and long period interference on system state
選取期望的特征根為
選取期望的特征向量為
采用式(13)求得反饋增益矩陣為
KEA=

同樣給予反饋系統Δα=5°、Δθ=5°的初始擾動,系統在短周期變量擾動、長周期變量擾動作用下的狀態響應曲線如圖9所示,舵面變化曲線如圖10所示。由圖9(a)可知:迎角受到5°擾動后,俯仰角的變化量|Δθ|max≤0.08°,速度的變化量|Δv|max≤0.03 m/s;由圖9(b)可知:俯仰角受到5°擾動后,迎角的變化量|α|max≤0.2°,q快速收斂。這表明:EA方法不僅實現了長短周期的模態解耦,還改善了系統的穩態性能。

圖9 解耦后迎角和俯仰角擾動對系統狀態的影響Fig.9 Influence of angle of attack and pitch angle disturbance on system state after decoupling
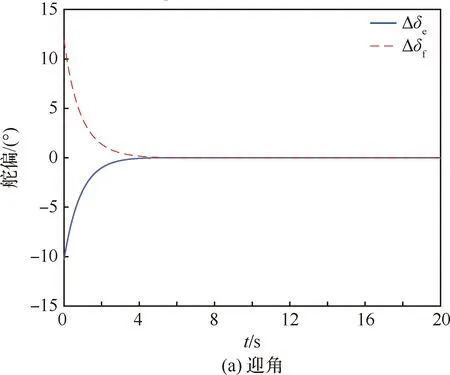
圖10 解耦后俯仰角和迎角擾動下的舵面變化曲線Fig.10 Control surface change curves under pitch angle and angle of attack disturbance after decoupling
本文設計的EA調節器的目的是為了實現長短周期解耦,航跡與姿態的解耦,傳統的SAS增穩系統反饋迎角和俯仰角速率的主要目的是進行增穩控制。圖11給出帶有“EA調節器解耦控制”模塊與帶有“傳統的SAS增穩系統”分別在5°航跡角擾動下的迎角α和俯仰角速率q的變化曲線。通過EA調節器解耦后的系統迎角的變化量|α|max≤0.2°,q快速收斂,而傳統SAS增穩系統呈現震蕩狀態。這表明:EA方法較傳統SAS增穩系統實現了長短周期的模態解耦,系統的穩態性能也更好。

圖11 5°航跡角擾動下的迎角和俯仰角速率變化曲線Fig.11 Angle of attack and pitch angle rate curves under track angle 5° disturbance
4.2 基于多操縱面控制分配的直接力著艦
以4.1節設計的EA調節器作為內環,基于式(22)~式(24)進行FPAH控制律、DP控制律、迎角穩定保持控制律的參數整定。飛機在H=300 m、V=70 m/s狀態下直接力控制分配的效能矩陣Be為
(28)
各操縱面的位置限制如表1所示

表1 操縱面位置限制
在著艦構型下,鴨翼、前緣襟翼、后緣襟翼、襟副翼下偏有利于增加飛機的升力,參照美國F-18艦載機著艦時根據載荷配置情況分上、中、下3個區間聯動預偏襟翼和副翼的做法,本文將上述操縱面配置在表2所示位置。

表2 操縱面預偏設置
(29)
根據表2計算并設計各個操縱面相對于預偏基準Δδ的控制約束如表3所示。
基于表2和表3分析結果進行下滑配平,采用直接分配法對式(25)進行分配求解,并完成式(22)~式(24)控制律參數的整定。對FPAH模態和DP模態進行仿真分析

表3 操縱面控制約束
1) FPAH模態仿真結果
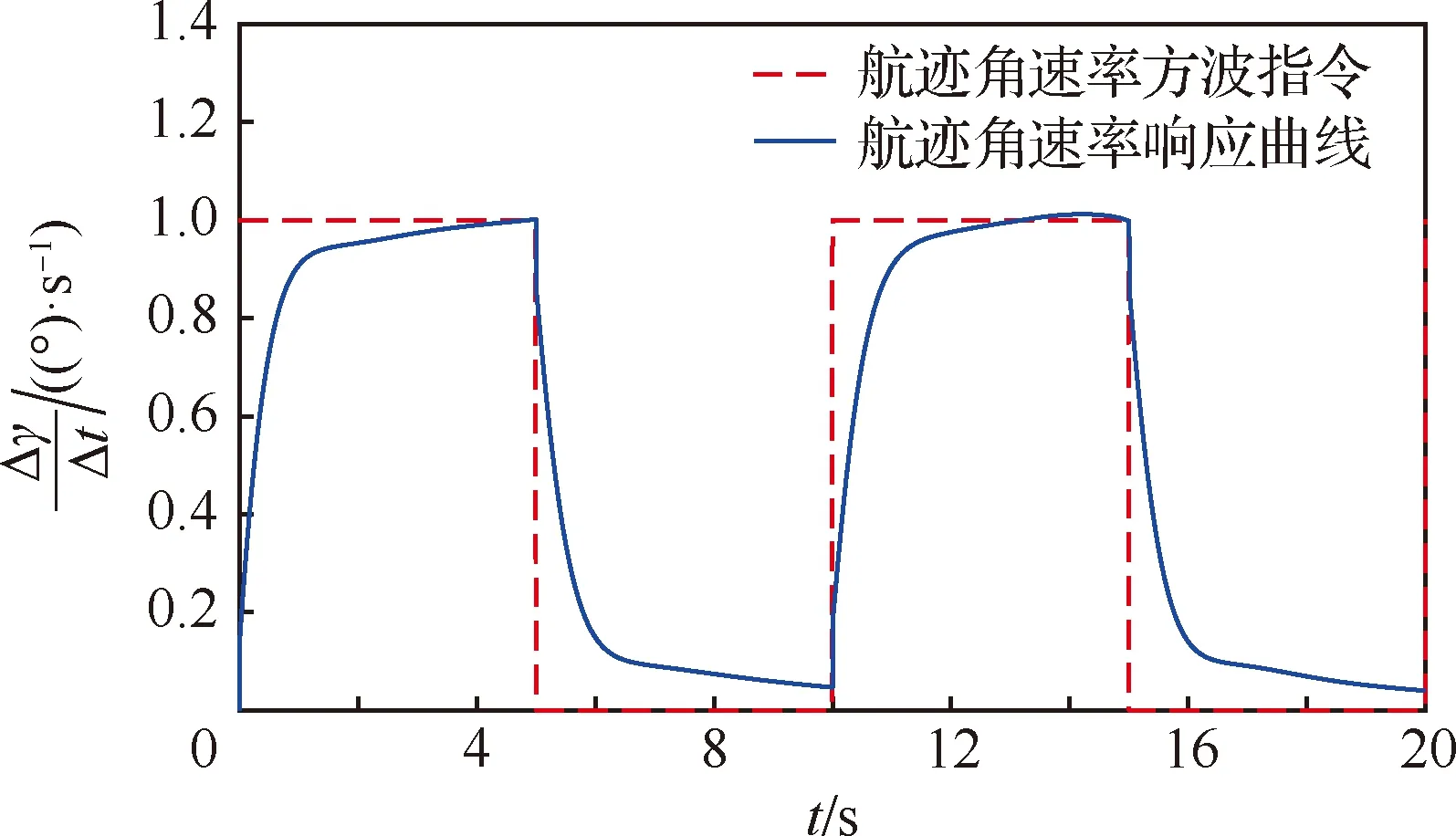
圖12 FPAH模態航跡角速率響應曲線Fig.12 Response curves of FPAH mode track angular rate
2) DP模態仿真結果
采用DP控制模態進行著艦下滑仿真,響應曲線如圖13所示。仿真分析:在50 s時接入λc=-3.5°航跡角下滑指令,飛機快速由平飛段過渡到下滑段,航跡角動態響應快速性較好,且迎角偏離下滑參考值最大不超過0.15°,這說明長短周期模態解耦性能較好,下滑迎角保持控制律展現出了良好的性能。整個下滑段飛機速度始終保持在配平值70 m/s,基于迎角恒定的動力補償油門控制效果良好。由于采用了多操縱面控制分配技術,極大地利用了諸多操縱面的增升效果,下滑迎角參考值減小至αref=4.3°,也呈現出了穩定的下滑控制。操縱面響應方面:升降舵負責迎角保持和俯仰力矩平衡,變化平穩最大出舵量為2.5°;襟翼負責航跡跟蹤,當航跡減小時,襟翼上偏減小升力,使航跡角快速跟蹤到期望值,速度軸和機體軸同時變化從而使飛行迎角保持不變,航跡角變化量等于俯仰角變化量,展現出了直接升力控制良好的性能,全程襟翼出舵量最大不超過6°。

圖13 DP模態下滑著艦狀態和舵面響應曲線Fig.13 Response curves of state and rudder in DP mode glide down and landing
直接力控制不同于常規方法以俯仰姿態控制軌跡,它能夠消除軌跡運動和姿態運動的耦合,直接地對作用于飛機的力產生影響,因此當艦載機航跡在受到艦尾流擾動影響時,直接力控制可以快速地對航跡角偏差進行動態調節,具有動態快、滯后時間短的優點。綜上,基于特征結構配置的直接力控制效果良好,達到了預期設計要求。
4.3 艦尾流擾動抑制
為了驗證該方法對于艦尾流的抑制作用,建立低空自由大氣紊流、雄雞尾流、航母縱搖誘導尾流和隨機尾流數學模型,設置甲板風速為18 m/s, 艦載機飛行速度為70 m/s,航空母艦縱搖幅度為1°,頻率為0.6 rad/s,初始隨機相位45°。艦尾氣流綜合后,各分量仿真結果如圖14所示。
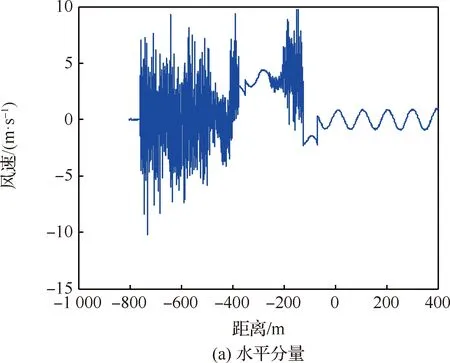
圖14 艦尾流各分量Fig.14 Each component of ship wake
控制艦載機處于DP模式,給予λc=-3.5°的持續航跡角參考指令,并加入艦尾流擾動,飛機的航跡角、迎角和俯仰角速率響應曲線如圖15 所示,副翼、升降舵、襟翼偏度的變化曲線如圖16和圖17所示。從仿真結果看,采用EA解耦設計多操縱面控制分配IDLC著艦控制方案相對于常規PID控制呈現出了更強的艦尾流抑制能力,著艦航跡角雖然出現了小幅振蕩,但遠優于常規力矩式控制。

圖15 艦尾流擾動下的狀態響應曲線Fig.15 State response curves of ship wake disturbance

圖16 艦尾流擾動下常規PID控制舵面偏度Fig.16 Conventional PID control of rudder deflection under wake disturbance
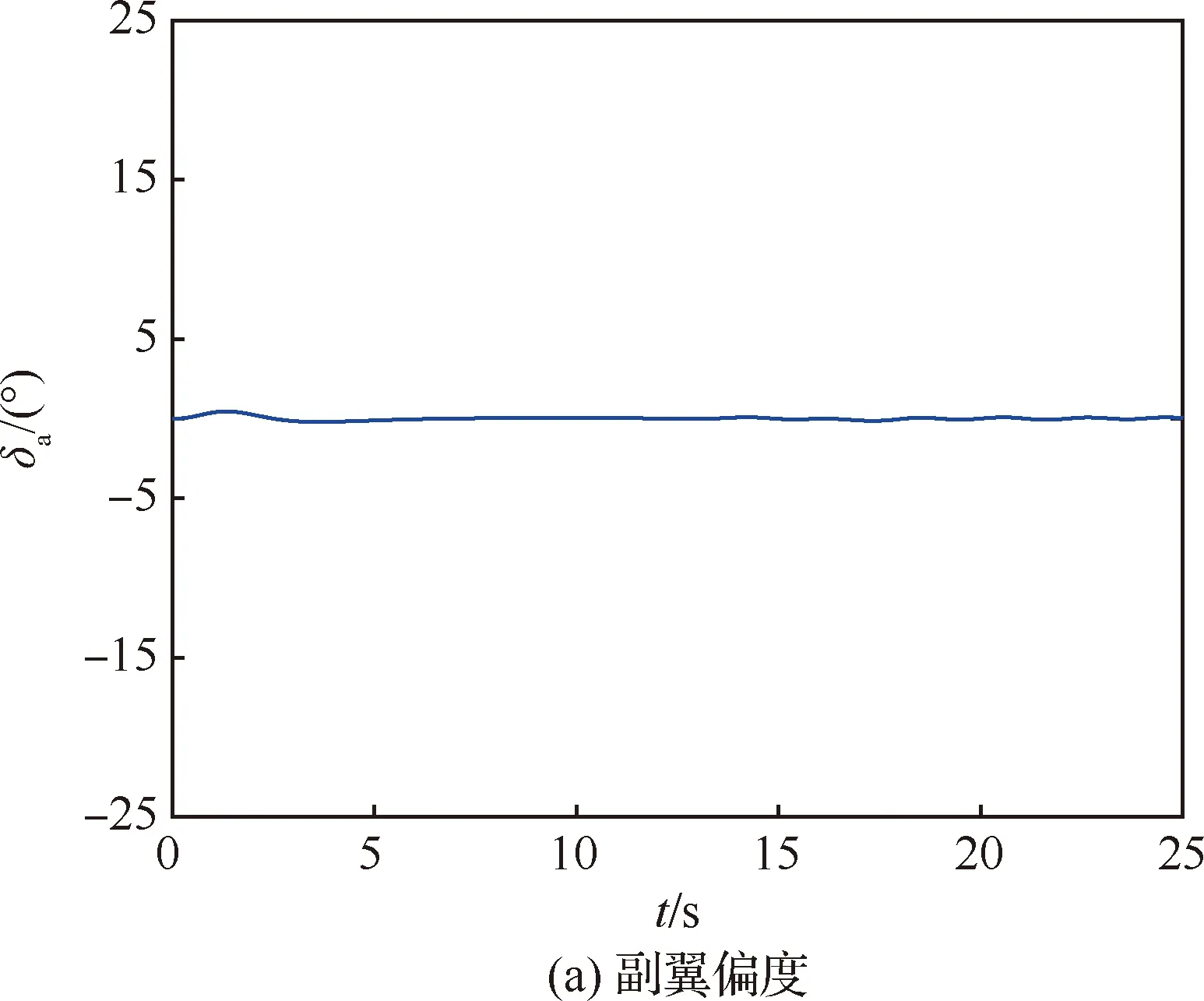
圖17 艦尾流擾動下直接力控制舵面偏度Fig.17 Direct force control of rudder deflection under wake disturbance
5 結 論
1) EA調節器能夠實現飛機縱向運動長短周期模態的解耦,在飛機長周期變量受到擾動或輸入作用時,對短周期變量的影響很小。EA解耦控制的這種特點十分有助于油門通道與縱桿通道的解耦設計,當縱桿回中時,還具有抑制艦尾流擾動、穩定飛機下滑狀態的能力。
2) 基于多操縱面控制分配的IDLC方法能夠充分發揮三翼面飛機操縱面的氣動優勢,特別是利用鴨翼正偏增升,不但可以增升,還可以降低對升降舵的配平能力要求,并在一定程度上減小升降舵上偏所帶來的升力損失。
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
鐵道通信信號(2020年9期)2020-02-06 09:15:22
當代陜西(2019年11期)2019-06-24 03:40:28
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00