基于OODA環的對地攻擊流程半實物仿真驗證方法
2021-10-21 12:41:16張昊金琳乘王勝男
航空學報 2021年8期
張昊,金琳乘,王勝男
航空工業沈陽飛機設計研究所,沈陽 110035
未來戰爭具有深度信息化、智能化、無人化的特點,無人作戰的相關概念和技術飛速發展,如何更好地將無人飛行器應用于現代戰爭已經成為備受關注的研究熱點[1-4]。對地攻擊無人機作為信息化戰爭的戰場作戰單元,可以獨立完成探測-識別-決策-打擊-評估的作戰流程閉環[5-6]。
機載航電軟件和設備是影響對地攻擊無人機作戰能力的關鍵,其中對目標的攻擊流程是無人機重要的任務環節。為保證飛行試驗任務成功和無人機安全,需對無人機和環境要素進行充分的地面驗證。但是在地面難以創造出飛行和戰場環境,需合理設計驗證方法驗證對地攻擊流程的正確性和可行性。
目前在驗證系統過程方面,不同的工程方向根據自身研究對象的實際情況形成了一些驗證方法。在航天領域,由于在地面難以創造出失重和真空的復合環境,對太空過程的驗證一般利用各種物理環境近似的方法分階段實施[7-9]。在數據處理領域,對數據處理過程的驗證方法多是通過判讀處理結果的正確性或信號效果進行評價[10-12]。在網絡技術領域,對網絡功能流程的驗證一般采用計算機仿真的手段,通過系統運行和數據流向的正確性實現驗證方法的構建[13-16]。在飛行器領域,學者們一般采用半實物的地面仿真試驗來驗證飛機飛行過程的可靠性或導彈攻擊飛行過程的有效性[17-19]。
在飛行器的任務過程領域,對飛行任務過程的驗證方法和手段還停留在計算機仿真層面,尚未涉及像航天過程和飛行過程一樣的半真實環境驗證方法,而無人機對地攻擊的任務過程需要在飛機設計時就依靠機載設備條件得到可靠有效的驗證。
為了解決以上問題,本文采用觀察-判斷-決策-行動(Observation-Orientation-Decision-Action, OODA)環的思想,將對地攻擊流程驗證工作融入攻擊流程半實物試驗中,分析了無人機對地攻擊流程,依托真實機載設備構建了半物理的驗證系統,在計算機仿真部分融合攻擊過程的精度模型,形成了一種無人機對地攻擊流程驗證的新思路。
1 無人機對地攻擊流程分析
1.1 作戰流程
現代化戰爭中戰場形勢瞬息萬變、實時數據龐大、對抗環境復雜,戰爭形態已經由傳統的“平臺中心戰”向“網絡中心戰”轉變,無人機正在作為網絡節點參與到體系對抗中來。對地攻擊型無人機具備偵察探測能力、數據分析融合能力、自主決策能力和對地攻擊能力,其對地攻擊的過程遵循著感知-判斷-決策-行動的OODA環周期。對地攻擊型無人機對地上目標攻擊過程是一種復雜、連續的信息處理與信息操縱過程,具體對地攻擊的作戰過程可分為信息感知、威脅研判、自主決策和攻擊執行4個階段[20],與OODA環一一對應,如圖1所示。

圖1 無人機對地攻擊作戰過程Fig.1 UAV air-to-ground attacking process
對無人機對地攻擊流程的驗證手段需要從感知-判斷-決策-行動的OODA環出發,充分考慮實際作戰過程中的各種因素,在驗證環境中通過實物驅動或數字仿真的手段逼近真實戰場作戰過程,使攻擊流程得到有效驗證。
1.2 感知過程
無人機的感知過程是通過數據鏈接收、本機探測得到戰場的態勢信息,進行傳感器數據融合、目標樣本積累和特征融合,經過本機的處理單元進行處理、學習和分析,優化產生可供無人機使用的信息,完成對戰場的態勢感知和目標識別。
在高對抗干擾、高實時響應戰場環境下,無人機裝備的多種傳感器,如合成孔徑雷達、激光雷達、多譜或超譜傳感器等,提取到的戰場信息數據形式與數據格式差異巨大,所包含的信息屬性不能保持一致,得到的數據也會存在模糊或丟幀現象,導致偵測信息的威脅特征不明顯或在時間和空間維度上不連續。
對地攻擊型無人機還需要應對戰場中存在的偽裝、誘餌等能模擬真實目標的外形、溫度、電磁特性等有限特征的手段;其中存在的敵方對抗系統也會對成像偵察、紅外偵察以及電磁偵察等手段進行干擾。
1.3 判斷過程
無人機的判斷過程是對戰場信息感知過程得到的數據信息分析、歸類處理,結合起飛前的任務規劃與裝訂信息,篩選識別任務目標,對不斷到來的數據逐步判別達到對敵方意圖和作戰計劃辨別的目的。
當前環境下,“人工智能(AI)、云、網、群、端”已經逐步成為智能化戰爭中的制勝手段,對OODA環路中判斷環的影響與干擾因素蜂擁而至。敵方行為方式不再與傳統戰術戰法相同,包括分化與離散、集結與聚合、突然襲擊等,在廣域化的對抗環境下,敵方元素規模龐大、行為單元密集、關系演進詭變,無人機的威脅研判過程已經成為攻擊過程的重要環節。
1.4 決策過程
決策是智能化戰爭對抗的核心和中樞。自主決策過程體現在完成起飛與引導航路的飛行后,無人機根據戰場環境和裝訂任務的變化改變自身飛行策略,自適應地調整任務規劃。
無人機利用數據、知識、場景等驅動方式,根據復雜、多變的態勢條件和敵方的實時作戰意圖,預測敵方行為、籌劃飛行航線、制定最優的飛行和攻擊方案、優化攻擊列表序列等,在任務規劃時就考慮無人機對各種戰場對抗因素的適應性,為后續的行動打擊環節奠定有利條件。
在高度不確定的戰場條件下,無人機的自主決策功能通過先驗知識以及與環境交互得到的信息,進行分析和策略定制;通過態勢信息及預測信息,針對防空威脅和所攻擊目標的毀傷特征,制定攻擊方案以及對突發情況采取的機動措施,提高作戰效能。
1.5 行動過程
由于無人機的作戰任務是對地攻擊,機載武器一般是激光制導炸彈和衛星制導炸彈,其攻擊流程的OODA環的行動過程是指根據任務規劃和攻擊決策信息完成火控解算、攻擊引導、武器投放和目標指示的攻擊過程。
無人機的行動過程直接關系到本次攻擊任務的完成情況,在攻擊過程中無人機投放狀態、戰場風環境、目標指示精度等多種因素都會對制導炸彈的命中概率造成影響。衛星制導炸彈對目標打擊精度主要在于武器自身精度,激光制導炸彈則主要在于激光制導精度和武器自身精度。目標的易損特性和武器的命中誤差直接影響著制導炸彈的毀傷效果,影響著整個攻擊流程的最終判定結果。
因此在無人機對地攻擊流程的驗證過程中需要考慮攻擊過程中存在的各種誤差因素,對攻擊流程中的誤差鏈建模形成有效的毀傷傳遞仿真環節,來保證對地攻擊流程的有效驗證。
2 基于OODA環的半實物驗證系統
2.1 系統架構
半實物驗證方法是近年來研究復雜系統驗證的可靠手段,同時也是進行效能評估的重要方法。半實物驗證的主要目的是評估系統的任務品質并檢測設計缺陷與偏差,驗證平臺一般按照目標系統的真實構造進行構建,具備模擬無法真實構建的驗證條件。
基于OODA環的攻擊流程半實物仿真驗證系統通過真實機載設備與計算機仿真相結合的方式,機載嵌入式軟件與相應的設備可以在新型飛機初期設計定型試驗中得到有效的驗證。依靠高實時性的反射內存交換網絡,計算機仿真環境可以便捷地引入相應的試驗驗證條件,以及存儲驗證過程中的通信數據與系統信息,從而形成整個攻擊流程驗證的數據閉環。系統架構如圖2所示。
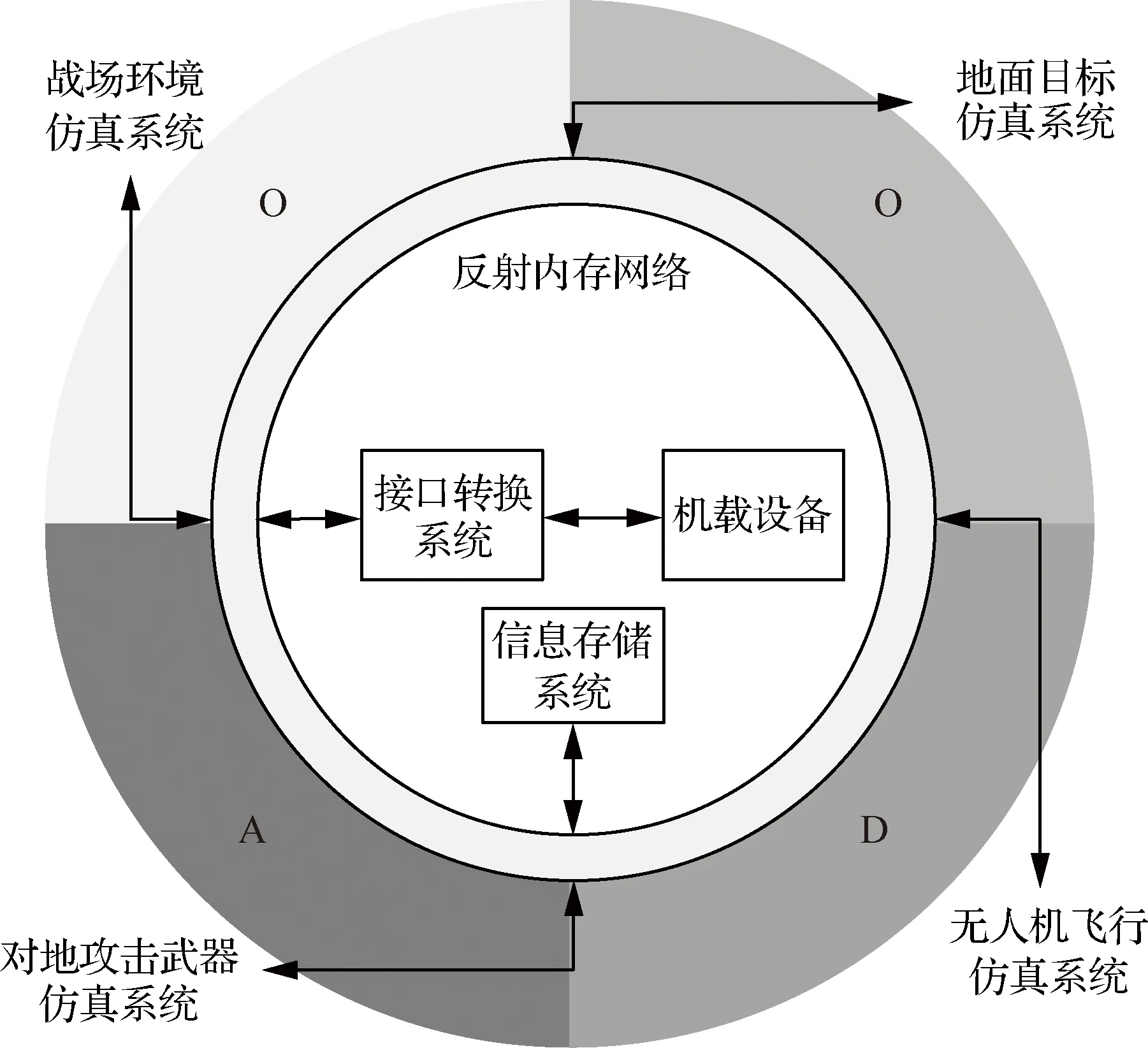
圖2 半實物驗證系統結構Fig.2 Structure of semi-physical verification system
2.2 實時接口網絡
本文采用的半實物仿真驗證系統基于Windows系統開發,具有應用軟件平臺豐富和軟件實體便于使用人員操作的優勢,同時也受到內核設計中按照源碼分條(排隊)式執行的影響在同步性方面存在不足。因此在半實物驗證系統架構的設計中,對仿真系統按功能劃分進行物理式分離,分為戰場環境仿真系統、信息存儲系統、接口轉換系統、飛行仿真系統、目標仿真系統和武器仿真系統6個子系統,結合反射內存網絡的數據通信方式,彌補Windows開發帶來的同步性影響,形成高實時性的半實物驗證系統。
反射內存網絡采用多個獨立的計算機共享通用數據集的方式,形成了一種共享計算機內存的網絡系統。反射內存網絡中的計算機應用軟件在ns級的時間內將需要共享通信的數據寫入內存網卡空間中,并在μs級時間內通過網絡將信息同步到網絡上所有帶有反射內存卡的計算機上。
采用反射內存網絡構建的半實物仿真驗證系統形成了分布式實時同步網絡的架構,在對地攻擊流程的驗證中具備實時模擬戰場單元的能力,形成了一套實時的數據驅動仿真閉環。圖3顯示的是反射內存網絡系統通過數據控制與交換設備控制整個網絡的工作流程與管理信息,各入網計算機按照設定的網絡內存卡地址可同步對網絡內所有反射內存進行共享。

圖3 反射內存網絡系統Fig.3 Reflective memory network system
2.3 機載設備與環境交聯
為了實現機載設備與驗證環境中仿真系統的互聯互通,使驗證環境產生真實可靠的驅動數據,接口轉換系統將光纖總線數據轉化為機載通信數據發送給環境中的機載設備。同時接口轉換系統也作為機載設備和驗證環境的物理隔離,形成對機載設備和光纖總線的雙向保護。
接口轉換系統將真實的機載設備和仿真驗證環境形成交聯,使半實物驗證系統的功能閉環。圖4為接口轉換系統的組成框圖。

圖4 接口轉換系統組成Fig.4 Formation of interface conversion system
接口轉換系統通過特定的適配電纜與機載設備連接,在非總線信號處理功能中完成設備與環境間離散信號和脈沖信號的A/D與D/A轉換,同時將音頻/視頻信號打包轉換。接口轉換系統通過自身的反射內存模塊與高速實時的反射內存網絡連接,在總線信號處理功能中完成與其他子系統和機載設備的信息數據交換。
3 精度模型
3.1 感知精度模型
無人機的態勢感知能力主要由數據鏈能力和機載傳感器能力組成,因此在對無人機攻擊流程進行半實物驗證時需要將感知精度模型劃分為數據鏈精度模型和傳感器精度模型。
數據鏈的精度水平主要體現在任務數據傳輸延時,指揮中心將任務信息傳輸至無人機的時間延遲為上行延遲tup,無人機將戰場信息傳輸至指揮中心的時間延遲為下行延遲tdown。數據鏈精度僅對無人機攻擊任務傳遞目標時造成影響,表示為
tdelay=tup+tdown
(1)
傳感器精度分為本機狀態測量精度和目標狀態測量精度,本機狀態的測量值主要包括高度h、航向ψ、空速V、升降速度Vh、馬赫數Ma、攻角α和側滑角β;目標狀態的測量值主要包括目標斜距ST、目標俯仰角φTy和目標方位角φTz。這些載機和目標的測量精度均是傳感器測量誤差xi,因此可以采用服從于正態分布的指標精度εi表示,當指標精度等于3σ時,其概率密度為
(2)
當無人機的感知過程受到敵方或戰場環境干擾時,其對目標的探測精度模型還需要加入探測概率模型。考慮到對地攻擊無人機對地面目標的定位手段主要是光學傳感器,戰場煙幕干擾是主導的干擾條件,因此將目標的圖像對比度作為探測概率輸出結果。
圖5給出了光電測量系統測量物體視在亮度的方式,物體受太陽輻射的影響射出一定光譜范圍的輻射光,其經過大氣后的衰減可以用大氣消光模型計算,大氣在太陽的照射下產生的大氣背景光亮度亦可被光學傳感器捕捉。

圖5 大氣傳輸模型Fig.5 Atmospheric transport model
目標/背景的視在對比度可以表示為
(3)
式中:It為目標經過大氣傳輸后的光譜輻照亮度;Ibg為背景經過大氣傳輸后的光譜輻照亮度。
在存在煙幕影響時,目標和背景經過大氣傳輸后的光譜輻照亮度均發生改變,其中,It可表示為煙幕成分的質量消光系數、煙霧濃度和視線上煙幕路徑長度的函數:
It=f(αOBS,COBS,LOBS)
(4)
式中:αOBS為質量消光系數;COBS為煙霧濃度;LOBS為視線上煙幕路徑長度。
3.2 判斷精度模型
無人機通過感知過程得到戰場威脅信息后,需要根據自身狀態和威脅特性對戰場條件中的威脅進行判斷。攻擊流程仿真驗證的判斷環節精度建模的工作主要是建立無人機對戰場威脅的估計模型,主要體現在對敵方防空火力系統能力的判斷。
對地攻擊無人機在感知過程可以得到敵方雷達位置坐標(xs,ys,zs)并根據其特征得到敵方雷達的最大探測半徑Rs,因此對空預警雷達對無人機的發現概率與二者相對位置的關系為
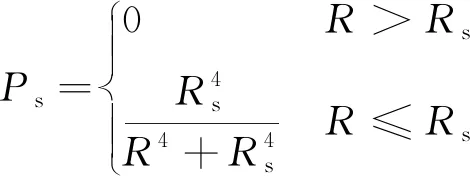
(5)

地空導彈也是敵方防空火力系統的重要組成部分,無人機需要對防空導彈的殺傷區進行判斷估計。在防空火力區域內,地空導彈對殺傷距離dsy內的目標可以實現概率殺傷,殺傷概率由目標的速度VT、距離RT、高度hT和航向ψT決定,可表示為
Pk=fk(VT,RT,hT,ψT)
(6)
因此無人機根據當前飛行狀態可以估計地空導彈的水平殺傷區范圍及殺傷概率,在指定高度地空導彈的水平殺傷區如圖6所示。圖中O為地空導彈發射點,OS為地空導彈射向,OP垂直于鉛垂射向面構成右手系,MNKL多邊形區域表示指定高度地空導彈的水平殺傷區,dsj為殺傷區近界,dsy為殺傷區遠界。
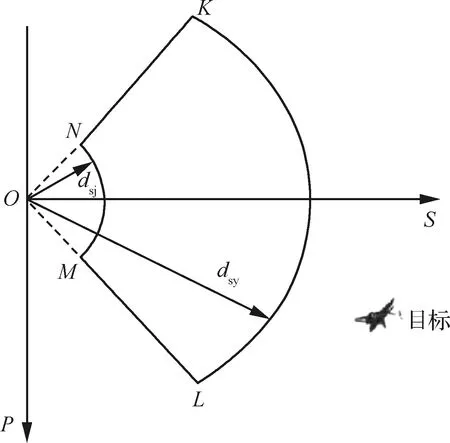
圖6 地空導彈水平殺傷區Fig.6 Ground-to-air missile horizontal killing area
3.3 攻擊精度模型
在OODA環的行動階段,無人機執行火控解算、攻擊引導、武器投放和目標指示等動作,在此過程中武器的落點系統誤差和無人機目標指示誤差均會對武器的落點精度造成影響,從而最終影響對地攻擊任務的完成情況。
武器的落點系統誤差表征著武器自身的精度水平,一般以圓概率誤差(CEP)進行考核,轉換服從于正態分布的概率密度表示為

(7)
因落點在彈道方向及其水平方向上系統散布基本相同且獨立,因此可以得到落點偏差的標準差:

(8)
無人機使用激光制導炸彈時,會射出激光指示目標位置引導激光導引頭進行末制導,此過程帶來的目標指示誤差主要與機目距離和激光光斑偏差有關,可表示為

(9)
式中:LMT為無人機和目標的斜距;(ΔxTp,ΔzTp)為激光光斑實際照射位置與目標實際位置(xT,zT)的偏差;εpx、εpz為激光指示系統的角偏差分解結果。
4 實例分析
4.1 驗證條件
為了對某無人機的對地攻擊流程進行驗證,在仿真驗證環境的精度模型中設定不同的通信能力、傳感器能力、敵方防空火力系統配置、武器誤差和目標指示誤差,形成低、中、高(L、M、H)3種不同水平的戰場對抗強度,戰場對抗強度也表征著無人機所處戰場環境的不確定性。在編號為m、n、p的態勢環境下(對應的戰場對抗強度分別為L、M、H),分別對序號為A、B、C的機載軟件進行3次地面目標攻擊驗證,測試條件見表1。
表1 測試條件
4.2 攻擊結果
機載軟件A、B、C分別在半實物仿真驗證環境中進行了9次試驗,若無人機在執行武器投放前被敵方偵測則攻擊流程失效,選擇有效攻擊流程對目標的摧毀百分比作為驗證攻擊流程有效性的判斷條件,試驗結果見表2。
表2 試驗結果
表2顯示了機載軟件在半實物驗證的試驗結果,可以看出軟件B的失效次數最多,有效攻擊流程對戰場目標的摧毀水平也最高,軟件C沒有失效次數但對戰場目標的摧毀水平低于軟件B和軟件A。
試驗過程和結果表明,軟件B在判斷和決策過程中嚴格依據感知過程信息數據進行決策,導致其在中、高對抗強度的戰場態勢中全部失效,受數據鏈誤差、定位誤差和敵方防空變化的影響,在武器投放前被預警雷達偵測,在低強度的對抗條件下,表現出了明顯的攻擊行動過程的導向性,達成了較高水平的對目標摧毀能力。
軟件A的失效次數均出現在高對抗強度條件的態勢環境中,在判斷和決策過程中對戰場干擾和敵方防空的精度敏感程度介于軟件B、軟件C之間,其對戰場感知和判斷模型精度的裕量依舊不夠。
軟件A和軟件C在對戰場目標的摧毀能力上與軟件B相比稍弱,但攻擊過程的失效次數大幅下降,可以根據任務和無人機使用需要進行適應性使用。
5 結 論
1) 通過對無人機攻擊流程的分析,將攻擊流程劃分為感知、判斷、決策和行動4個過程,構建實時半實物仿真環境與機載設備交聯,對感知、判斷和攻擊精度建模,形成機載嵌入式軟件運行的半實物驗證系統。
2) 以任務失效次數和對目標的摧毀能力為評判條件,通過不同戰場強度的試驗態勢條件,驗證并分析了3套機載嵌入式軟件的工程可行性。
3) 在飛機設計階段利用半實物仿真驗證系統對機載設備進行驗證,可以在設備上機前暴露設計缺陷,指導軟件的功能分配和適應性調整,進一步優化無人機的OODA打擊閉環過程,為攻擊流程的工程設計提供支撐。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年11期)2019-01-07 01:28:02