欠驅動無人艇有限時間軌跡跟蹤控制
2021-10-21 08:50:27孫宏放張愛國
科技信息·學術版 2021年14期
孫宏放 張愛國

摘要:針對考慮外界干擾的欠驅動無人艇軌跡跟蹤控制問題,本文利用有限時間理論和滑模控制技術設計了一種有限時間控制方案。為了簡化控制器的設計,將軌跡跟蹤誤差系統分解為位置誤差和速度誤差兩個子系統。首先基于位置誤差子系統,為無人艇設計虛擬速度指令,使得位置誤差子系統在有限時間內達到穩定。然后利用雙曲正切函數,設計一種新型滑模變量和有限時間跟蹤控制方案,使得無人艇的速度誤差子系統趨于穩定。最后通過李雅普諾夫理論證明了控制器的穩定性,仿真結果說明了本文所設計方案的有效性。
關鍵詞:欠驅動無人艇;有限時間控制;軌跡跟蹤控制;滑模控制
引言
快速而精確的軌跡跟蹤控制是無人艇執行各種任務的基礎,隨著無人艇在邊防巡邏、極地探測、調查取證等領域的廣泛應用,無人艇軌跡跟蹤控制問題成為了各國的研究熱點。近年來,涌現出了PID控制、反步控制、滑模控制等多種軌跡跟蹤控制方法 [1-6]。忽略無人艇自身的不確定性和外界干擾,文獻[1-2]提出了一種非線性PD控制器,形式簡單便于應用。為了處理擾動和系統不確定性,文獻[3]和[4]設計了一種基于反步法的魯棒姿軌跡蹤控制器。文獻[3,4]有一個共同的缺點:基于反步法設計的控制方案可能存在“微分爆炸問題”,使得控制力矩趨于無窮大。為了解決這一問題,文獻[5-7]為無人艇設計了基于動態面的非線性控制方案。滑模控制對外界擾動和系統參數不確定性具有強魯棒性,在無人艇控制領域具有廣泛的應用[8-10]。
忽略外界擾動和系統參數不確定性對系統的影響,文獻[8]為無人艇設計了軌跡跟蹤控制方案。值得注意的是,無人艇所處工作環境具有各類干擾因素(主要由風力和水流產生),若忽略這些擾動因素對系統的影響,可能無法達到理想的控制精度,甚至造成系統失穩。鑒于此,文獻[9,10]利用積分滑模控制和神經網絡技術為全驅動無人艇設計了魯棒抗干擾控制器,可有效處理外界擾動。考慮欠驅動無人艇的抗干擾魯棒控制,文獻[11-13]結合自適應律和滑模控制策略,為無人艇設計了可在線估計未知干擾的控制算法。考慮無人艇在行駛過程中所受到的狀態約束和控制輸入約束,文獻[14,15]利用邊界層李雅普諾夫函數,為水面無人艇設計了漸進軌跡跟蹤控制方案。
文獻[1-15]所設計的控制方案雖然可以達到軌跡跟蹤控制的目的,但控制系統都是漸進穩定的,時間趨于無窮大時系統才會達到穩定狀態。相比于漸進穩定控制方案,有限時間控制方案可在有限時間內完成控制任務,具有更高的控制精度,同時控制方案對外界擾動具有更強的魯棒性。因此,針對無人艇的有限時間控制問題引起了國內外學者的廣泛關注[16-18]。基于一種新型有限時間擴張狀態觀測器,文獻[16]提出了一種自適應控制方案,可有效解決無人艇協同控制問題。針對同一問題,文獻[17]將該觀測器和輸出前饋控制方案相結合,提出了一種新型無人艇編隊控制方案。考慮多個無人艇在編隊過程中受到的視線距離約束和視線角約束,文獻[18]提出了一種基于邊界層李雅普諾夫函數的容錯控制方案。
雖然文獻[16-18]可解決無人艇有限時間控制問題,但所針對的對象為全驅動無人艇,無法解決欠驅動無人艇的有限時間控制問題。著眼于這一點,本文利用滑模控制策略,為無人艇設計了一種有限時間抗干擾控制方案。在設計控制器的過程中,通過嚴格的數學推理和數值仿真驗證了本文所設計控制器的有效性。
1 ?無人艇的數學模型
參考文獻[19],無人艇的三自由度運動學和動力學模型可描述為:
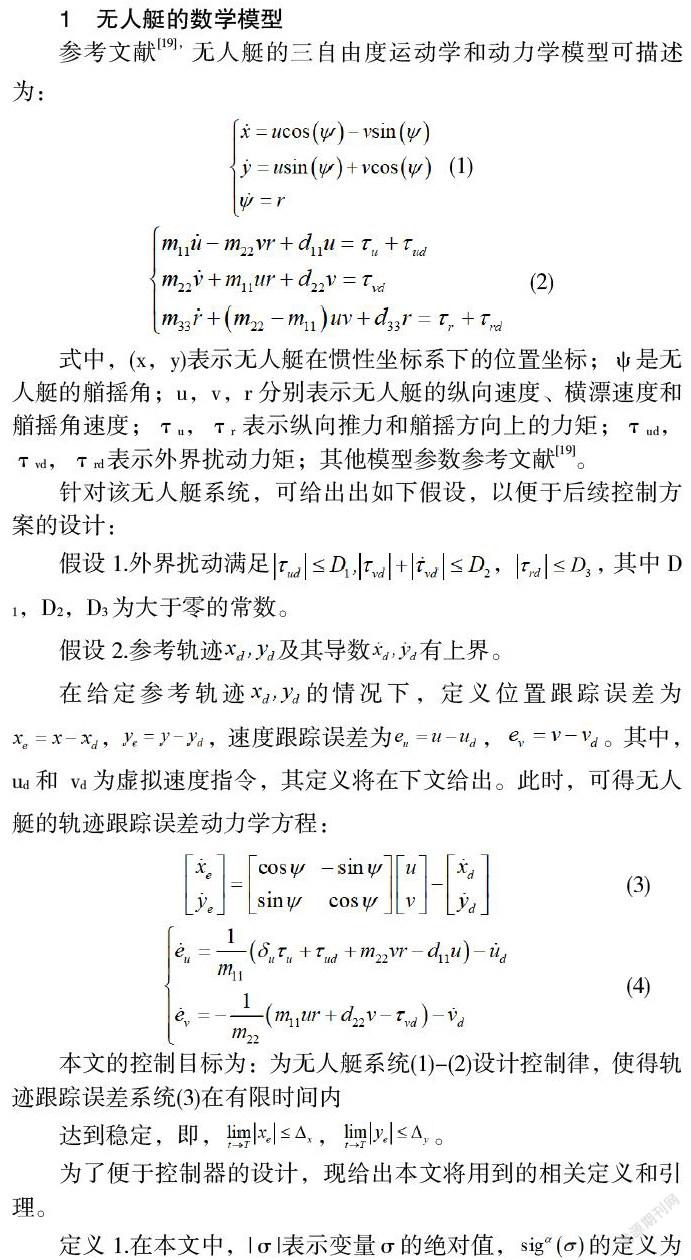
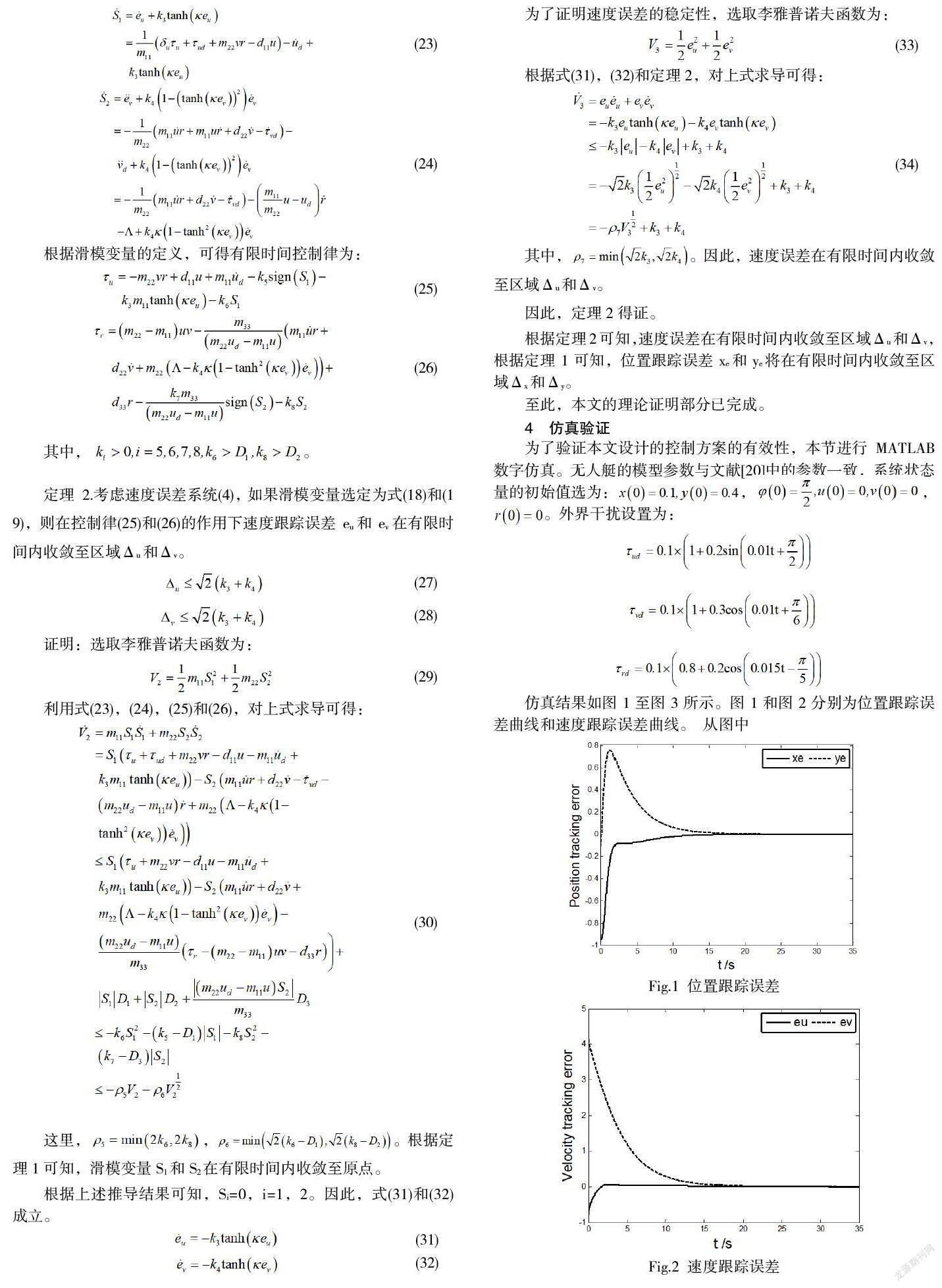
根據定理2可知,速度誤差在有限時間內收斂至區域Δu和Δv,根據定理1可知,位置跟蹤誤差xe和ye將在有限時間內收斂至區域Δx和Δy。
至此,本文的理論證明部分已完成。
4 ?仿真驗證
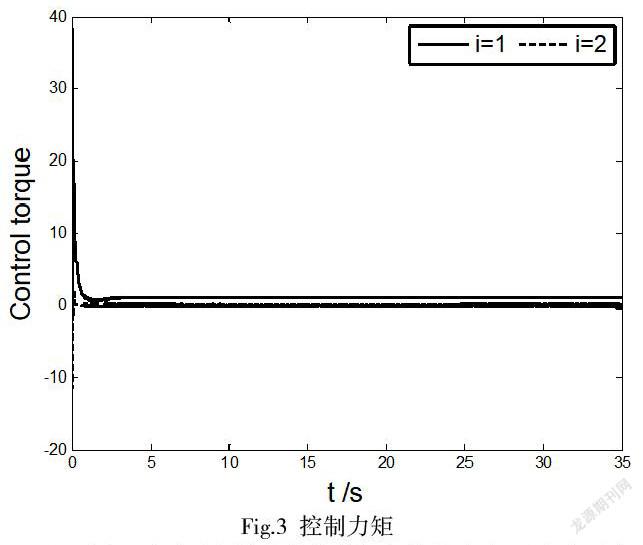
可以看出,在本文所給出的控制方案的作用下,無人艇可在15S內準確跟蹤參考軌跡。圖3為控制力矩曲線,從圖中可看出,本文所設計的控制方案的最大輸出力矩為20N·m。在初始時刻無人艇的跟蹤誤差較大,需要較大的力矩控制其跟蹤給定軌跡。系統達到穩定后,無人艇的控制力矩趨于平穩。根據仿真結果可知,本文所設計的控制方案可使無人艇準確跟蹤參考軌跡。
5 ?結論
針對無人艇的軌跡跟蹤控制問題,本文利用雙曲正切函數提出了一種非奇異有限時間滑模面,并在此基礎上設計了有限時間軌跡跟蹤控制器。該控制器在外界干擾的影響下,依然能夠在有限時間內完成對參考軌跡的跟蹤。
參考文獻
[1]Yunsheng F,Xiaojie S,Guofeng W,et al.On fuzzy self-adaptive PID control for USV course[C]//2015 34th Chinese Control Conference (CCC).IEEE,2015:8472-8478.
[2]Miao R,Dong Z,Wan L,et al.Heading control system design for a micro-USV based on an adaptive expert S-PID algorithm[J].Polish Maritime Research,2018,25(2):6-13.
[3]Xu H,Oliveira P,Soares C G.L1 adaptive backstepping control for path-following of underactuated marine surface ships[J].European Journal of Control,2021,58:357-372.
[4]Deng Y,Zhang X,Zhao B,et al.Event-triggered compound learning tracking control of autonomous surface vessels in the measurement network[J].Ocean Engineering,2021,228:108817.
[5]Dai S L,He S,Ma Y,et al.Cooperative Learning-Based Formation Control of Autonomous Marine Surface Vessels With Prescribed Performance[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2021.
[6]Zheng Z,Sun L,Xie L.Error-constrained LOS path following of a surface vessel with actuator saturation and faults[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2017 (99):1-12.
作者簡介:
孫宏放(1978.8),男漢族 安徽桐城人 學歷:博士研究生 職稱:副研究員,從事科技創新、人才引進、成果轉化和產業化等工作。
張愛國(1978.4),男漢族 山東巨野人 學歷:博士研究生 職稱:助理研究員,從事平臺搭建、創業孵化、成果轉化和產業推廣等工作。
