基于模型的多電飛機能源優化特性仿真分析
2021-10-22 08:46:36劉海港劉亮王鵬周維
航空學報 2021年8期
劉海港,劉亮,王鵬,周維
航空工業沈陽飛機設計研究所,沈陽 110035
傳統飛機二次能源主要為電能、液壓能和氣壓能三種,為機載設備提供不同形式的能源[1-3]。提高能源利用效率是多電飛機(More Electric Aircraft,MEA)的重要發展目標之一,其中一個重要的內容就是采用電能來取代液壓能、氣壓能,并通過系統集成控制實現能源的優化利用[4-6]。本文將采用基于模型的方法開展能源優化特性分析,并提出了一種電氣設備的多物理域模型,能夠實現不同機載系統的能源利用特性的大規模集成仿真。
在多電飛機中,飛控系統是實現多電化的重要機載系統,舵面由電能代替液壓能進行驅動,執行裝置采用電力作動器(Electric Actuator)[7-8]代替液壓作動器(Hydric Actuator)[9-10]。因此以飛控系統為對象,構建仿真模型,仿真分析使用飛控系統在不同能源供能時,能源的傳送、變換中的功率損耗等飛控系統能源優化特性。
1 飛控系統的能耗系統結構
飛控系統的主要能耗是為作動器提供能源,以驅動飛機舵面。此外,另一部分是能源變換、能源傳送、作動器工作中的損耗[11-13]。
飛控系統的能源結構如圖1所示,傳統飛機采用液壓能驅動飛機舵面,由液壓泵實現發動機輸出的機械能到液壓能的變換,經液壓管路傳送到液壓作動器,如圖1(a)所示。而多電飛機更換為電能驅動舵面,由發電機實現發動機機械能到電能的變換,經電纜傳遞到作動器,如圖1(b)所示。圖中,ΔPi為散熱功率。

圖1 飛控系統的能耗系統功率流
多電飛機的電力作動器有兩種,即機電作動器(Electromechanical Actuator,EMA)和電液作動器(Electrohydraulic Actuator,EHA),其重要的特點是在能源傳送中實現電能的消耗[14-16]。
由上述所知,如果進行飛機能源利用特性的仿真,需要建立能源變換、能源傳送和執行裝置的能源利用特性的模型[17-18]。
2 機載設備的多物理域模型
較傳統飛機相比,多電飛機增加了大量新型機載設備,均含有電子部件(包括功率電子部件和微電子部件)。這里以機電作動器作為典型電氣設備來分析構建其多物理域模型。
2.1 機電作動器的結構與多物理域模型
2.1.1 機電作動器結構
機電作動器的原理框圖如圖2所示,其核心部件為無刷直流電動機,輸出端的減速器由齒輪減速器與滾珠絲杠組成,將旋轉運動變為直線運動,電源測電力電子裝置由脈沖寬度調制(Pulse Width Modulation,PWM)控制的逆變器、電磁干擾(Electromagnetic Interference,EMI)濾波器組成,并通過嵌入式系統實現控制器的作動控制。
圖2所示的機電作動器裝置,從結構上可分為功率變換和信息變換兩部分。
1) 功率變換部分
結構上由逆變器、電動機、機械裝置和電源側的EMI濾波器組成,其主要功能是實現電能到機械能的變換。與此同時,設備各部分均有功率損耗,將部分電能、機械能變換為熱能,形成次要的功率變換過程。
2) 信息變換部分
結構上由控制器、數據采集和PWM信號發生器組成,主要功能是完成設備運行中的控制。除此之外,還可以實現設備運行狀態的監控、與上位機和其他設備的通訊等功能。
2.1.2 多物理域模型的基本結構
提出的多物理域模型如圖3所示,是將圖2中電氣設備的功率變換關系作為模型的重要組成部分,實現功率數據的傳遞,形成功率流;信息傳遞關系在根據參考信號完成對設備功率控制的基礎上,提取狀態信息,形成信息流。這里將功率變換的模型稱為功率變換模塊(Power Convert Model,PCM),而信息變換的模型稱為信息變換模塊(Signal Convert Model,SCM)。
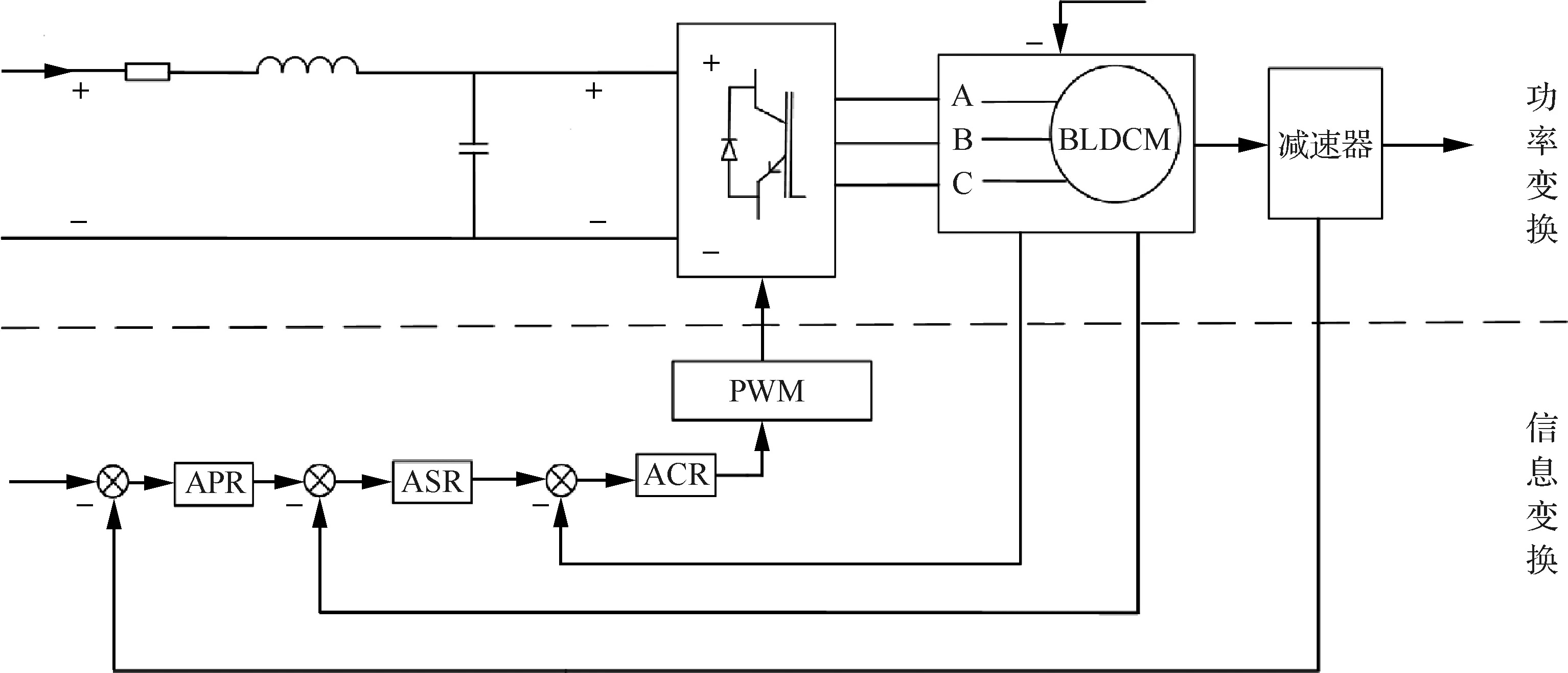
圖2 機電作動器的結構

圖3 電氣設備的多物理域模型結構
2.2 模型的功率變換模塊
圖3中的功率變換模塊(PCM)表現出電氣設備實現的功率變換特性,是將一種物理域的能量變換為另一種物理域的能量(如發電機實現機械能到電能的變換),而用電設備是實現電能到各種形式能源的變換。因此,PCM將電氣設備的運行過程表征為多物理域能源變換的過程,而SCM表征的是設備的控制方法和過程。
功率變換模塊(PCM)如圖4所示。其中Ys為輸入功率(電源功率)的勢變量,Xs為輸入功率的流變量,YL為輸出功率(負載功率)的勢變量,XL為輸出功率的流變量。功率損耗輸出一般均為熱功率,環境溫度Tw為勢變量,C為控制信號,損耗形成的熱流Фw為流變量。

圖4 電氣設備PCM的變換關系
多電飛機能源系統涉及到電能、機械能、液壓能、氣壓能和熱能等功率類型,相應的勢變量和流變量如表1所示。
表1中勢變量和流變量應根據設備的性能、運行場景來定義,例如電動機輸出功率也可以將電磁轉矩作為勢變量,旋轉轉速作為流變量,電流源的電功率也可以將電流作為勢變量,電壓作為流變量。
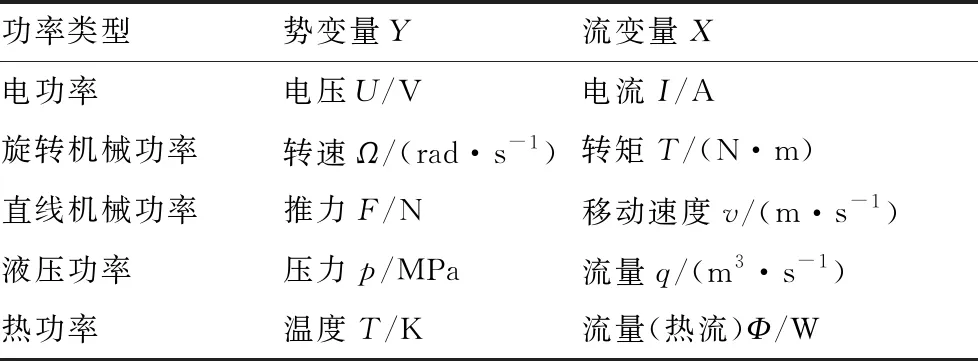
表1 不同功率形式的勢變量和流變量
根據圖4所示的功率變換模型(PCM)的輸入/輸出變量關系,用解析式方法可描述為
(1)
式中:傳遞函數W1(s)、W2(s)、W3(s)和W4(s)反映了功率變換過程中變量之間的動態特性。在進行系統集成時,輸入和輸出變量就是集成的接口變量,其中Ys和Xs與源端設備連接,YL和XL與負載端設備連接。
2.3 機電作動器的多物理域模型
這里以機電作動器(EMA)為例,構建多物理域模型。EMA是位置伺服控制系統,經減速器和滾珠絲杠輸出功率,可用推力F和移動速度v描述,也可以用舵面旋轉速度Ωa和舵面阻力矩TL描述。舵面旋轉速度Ωa和舵面阻力矩TL描述的PCM如圖5所示。
2.3.1 機電作動器的PCM模型
圖5所示的PCM解析式可以表示為

圖5 機電作動器的PCM
(2)
式中:G1(s)、G2(s)、G3(s)和G4(s)為EMA內部控制的傳遞函數;usc為電動機的控制電壓;TLc為舵面阻力矩TL、機械裝置的摩擦轉矩和阻尼轉矩之和。
2.3.2 機電作動器的SCM模型
EMA的信息變換模塊(SCM)如圖5所示,其實現舵面位置θa、電動機轉速度Ωm=kΩΩa和電動機電樞電流Id的三閉環控制,其中kΩ為電動機角速度Ωm與舵面旋轉角速度Ωa之間的等效減速比。信息變換模塊(SCM)解析式為
usc=DUs=
(3)
式中:Wacr、Wasr、Wapr分別為電流、轉速、舵面位置調節器的傳遞函數。SCM還可以包含模型仿真信號測量、與上位機等其他設備通訊等內容。
2.3.3 機電作動器的損耗模型
根據機電作動器的結構,功率損耗模型包括電力電子裝置的損耗ΔPape、電動機的電磁損耗ΔPaem(包括銅損耗ΔPacu和鐵損耗ΔPafe)和機械損耗ΔPam。對于該模型而言,電力電子裝置的損耗主要決定于電樞電流,電動機的機械損耗主要決定于電動機角速度,其余影響因素對模型的準確度影響較小,模型中進行忽略。機電作動器的損耗模型可表示為
Φw=ΔPape+ΔPacu+ΔPafe+ΔPam=
(4)
式中:kape、kacu、kafe、kamc分別為電子損耗ΔPape、銅損耗ΔPacu、鐵損耗ΔPafe和機械損耗ΔPam與電樞電流Is和電動機角速度Ωa之間的計算系數。
3 飛控系統設備的多物理域模型結構
3.1 含有SCM的多物理域模型
機載設備中含有閉環控制功能時,多物理域模型需要含有信息變換模塊(SCM)。
3.1.1 直流發電機多物理域模型
繞線型270 V直流發電機由同步發電機和整流電路組成,通過控制同步發電機的勵磁電流if,達到使輸出電源電壓穩定的目的[19-20]。直流發電機是將機械功率變換為電功率,其PCM模型如圖6所示。輸入機械功率的勢變量為發電機轉速ng,流變量為發電機的轉矩Tg;輸出電功率的勢變量為電源電壓Ug,流變量為用電設備的綜合電流Ig。圖7沒有畫出SCM部分,其控制功能是實現輸出電壓Ug的穩定在270V。

圖6 直流發電機的PCM

圖7 液壓泵的PCM
直流發電機損耗在同步發電機發電機銅損耗ΔPgcu、發電機鐵損耗ΔPgfe和機械損耗ΔPgm外的基礎上,增加了整流電路損耗ΔPgr,其損耗ΔPgs可以表示為
Φw=ΔPgs=ΔPgcu+ΔPgfe+ΔPgr+ΔPgm=
(5)
式中:變量ig為發電機輸出電流;ng為發電機轉速;kgcu、kgfe為發電機的銅損耗和鐵損耗系數;kgr為功率電子損耗系數;kgm為機械損耗系數。
3.1.2 液壓泵多物理域模型
液壓泵是液壓能的變換裝置,將發動機輸出的機械功率變換為液壓功率,其中輸入機械功率的勢變量為液壓泵角速度Ωp,流變量為液壓泵產生的轉矩Tp,輸出液壓功率的勢變量為壓力pp,流變量為流量qp。液壓源采用變量柱塞泵,SCM實現壓力的測量,并且通過控制斜盤的角度γβ來控制排量Vpm,保證液壓源壓力pp的穩定。
液壓能變換裝置為液壓泵,將發動機輸出的機械功率變換為液壓能,其功率損耗可以分為容積損耗ΔPhvp和機械損耗ΔPhmp兩部分,可表示為
Φw=ΔPhvp+ΔPhmp=
(6)
由式(6)可見,容積損耗ΔPhvp與液壓源的壓力pp的平方成正比;機械損耗與液壓泵的角速度Ωp成正比。航空采用的是恒壓液壓源,如果忽略液壓泵角速度Ωp的變化,則損耗不會因為輸出功率的變化而變化,即使在輕載或空載的情況下損耗也基本不變。
3.1.3 液壓作動器多物理域模型
液壓作動器由閥門控制引入液壓源,驅動油缸中的活塞運動,進而驅動飛機舵面運動。液壓作動器將液壓功率變換為機械功率,即輸入功率為液壓功率,液壓源壓力pp為勢變量,流量qp為流變量,而輸出功率為機械功率,舵面推力Fa為勢變量,舵面移動速度va為流變量,其PCM模型如圖8所示。
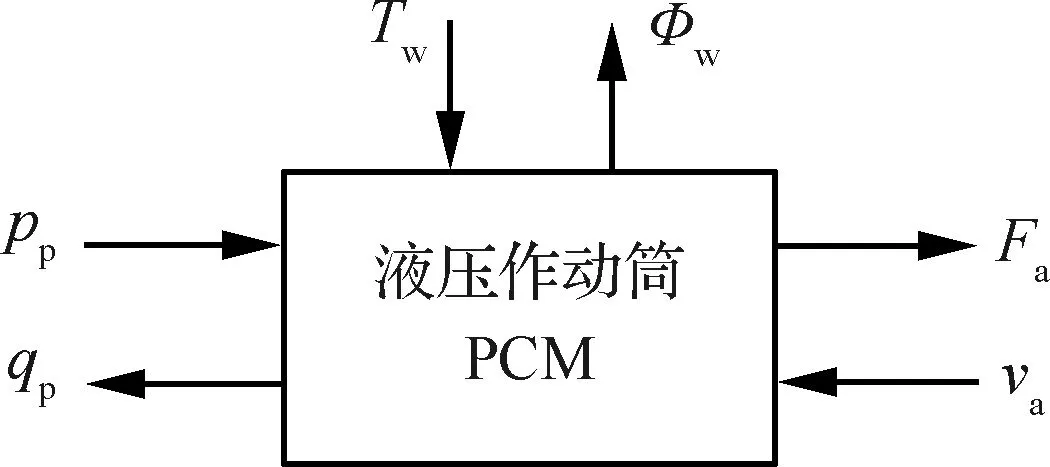
圖8 液壓作動器的PCM
液壓作動器信息控制模塊(SCM)的控制功能為測量移動位置,并根據移動位置控制閥門開關,即pp的ON/OFF。
液壓作動器的損耗ΔPhas為油液泄漏損耗ΔPhyd和機械損耗ΔPham兩部分,可表示為
Φm=ΔPhyd+ΔPham=
(7)
式中:λc為泄漏系數;Fhaf為作動筒的摩擦力;pa為作動筒活塞兩邊油缸的壓力差,決定于液壓源壓力pp;va為活塞移動的速度。khyd、kham分別為泄漏損耗和機械損耗對應的損耗系數。液壓作動器的泄漏損耗決定于液壓源的壓力,而機械損耗受作動器移動速度的影響。
3.2 不含SCM的多物理域模型
為了進行圖1所示飛控系統的能源利用特性的仿真,電纜、油管路也需要建立相應的模型。而這種設備因為沒有控制功能,因此沒有SCM。
3.2.1 電能傳送多物理域模型
電纜作為電能的傳送設備,只是因有一定的電阻而產生損耗,仿真中也將其用標準模型來描述,如圖9所示。PCM模型輸入電功率的勢變量為輸入電壓Us1,流變量為輸入電流Is1;輸出電功率,勢變量為輸出電壓Us2,流變量為輸出電流Is2。

圖9 傳輸電纜的PCM
電纜電阻Rcs的PCM解析表達式為
(8)
3.2.2 油管路多物理域模型
油管路是液壓源的傳送設備,油液的黏性導致流動過程中產生阻力,進而造成液壓源的壓力損失。液壓源的壓力損失可分為沿程壓力損失Δpλ和局部壓力損失Δpξ,沿程壓力損失是油液在等徑直管流動時所產生的壓力損失,而局部壓力損失是油液流經局部障礙(彎管或接頭)時的壓力損失。油管路的PCM模型如圖10所示,其中輸入為液壓功率,勢變量為輸入壓力pp1,流變量為輸入流量qp1;輸出也是液壓功率,勢變量為輸出壓力pp2,流變量為輸出流量qp2。

圖10 油管路的PCM
油管路的PCM的解析式為
(9)
其中油管路功率損耗是由壓力損失產生的,而壓力損失Δp∑包含各段直管的沿程壓力損失Δpλ和所有彎管或接頭的局部壓力損失Δpξ,表達式為
ΔpΣ=∑Δpλ+∑Δpζ=
(10)
式中:lh為各段油管路長度;dh為油管路的內徑;ρ為液體的密度;vh為液流速度;λh為沿程阻力系數;ξh為局部阻力系數。
4 兩種飛控系統的能耗特性分析
以一種5個主舵面的飛控系統為例,采用多物理域模型集成的方法,在完成某些飛行姿態的舵面控制時,對多電作動系統和傳統作動系統的功耗特性進行仿真,并進行兩種作動系統的功耗比較。
4.1 兩種飛控系統的仿真模型與數據
4.1.1 基于多物理域模型的飛控系統集成
兩種飛控系統均包括左右副翼、左右升降舵和方向舵5個舵面。如圖11所示,采用機電作動器模型和電源模型組合成多電飛控系統;采用液壓作動器模型和液壓源模型組合為傳統飛控系統。圖中,Tg為發電機轉矩,ng為發電機轉速,Us為電源輸出電壓,Is為用電設備的綜合電流,Usi為各電纜的輸入電壓,Isi為各電纜的輸出電流;Tp為液壓泵產生的轉矩,np為液壓泵轉速,pp為液壓源壓力,qp為流量,ppi為各油管路的輸入壓力,qpi為各油管路的輸出流量。
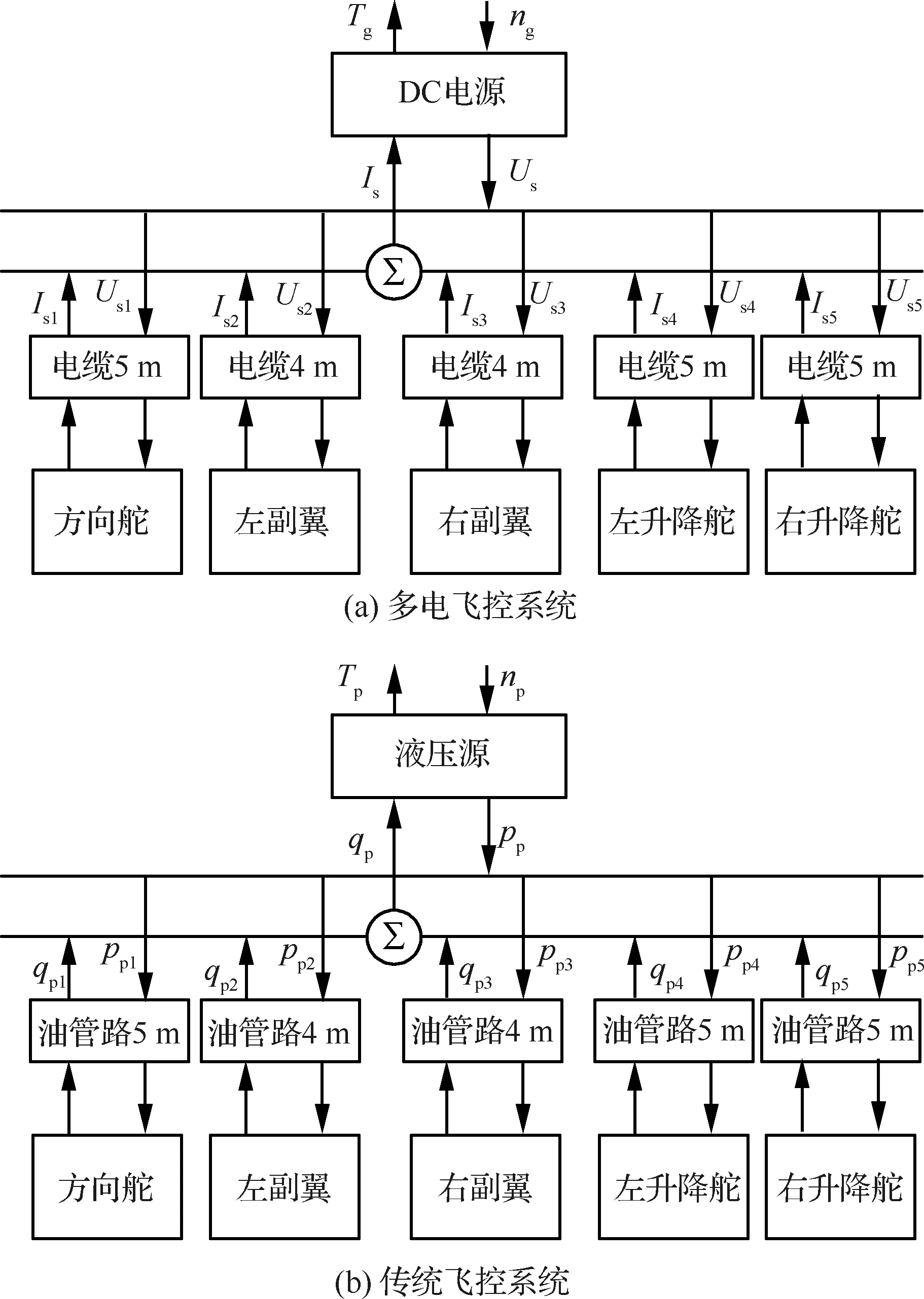
圖11 作動系統結構仿真
圖11中表示出各個作動器與電源/液壓源的傳輸距離,設計電纜通過電流為50 A,油管路存在3個彎頭,其中兩個彎曲度為135°,一個彎曲度為90°。在多物理域模型集成中,勢變量與流變量的計算為
(11)
或者
(12)
4.1.2 飛控系統設備參數
對于能源變換裝置,發電機效率通常高于液壓泵。為便于在額定狀態下進行比較,將兩種能源變換裝置(發電機和液壓泵)的額定功率和效率設置如表2所示。對于作動器,設定兩種作動器模型的參數如表3所示。

表2 能源變換裝置參數

表3 作動器參數
4.1.3 作動器功率特性
作動器實現的是位置控制,其功率特性如圖12所示,雖然兩種作動器的功率波形差別很大,但都屬于短時的脈沖負載[21]。
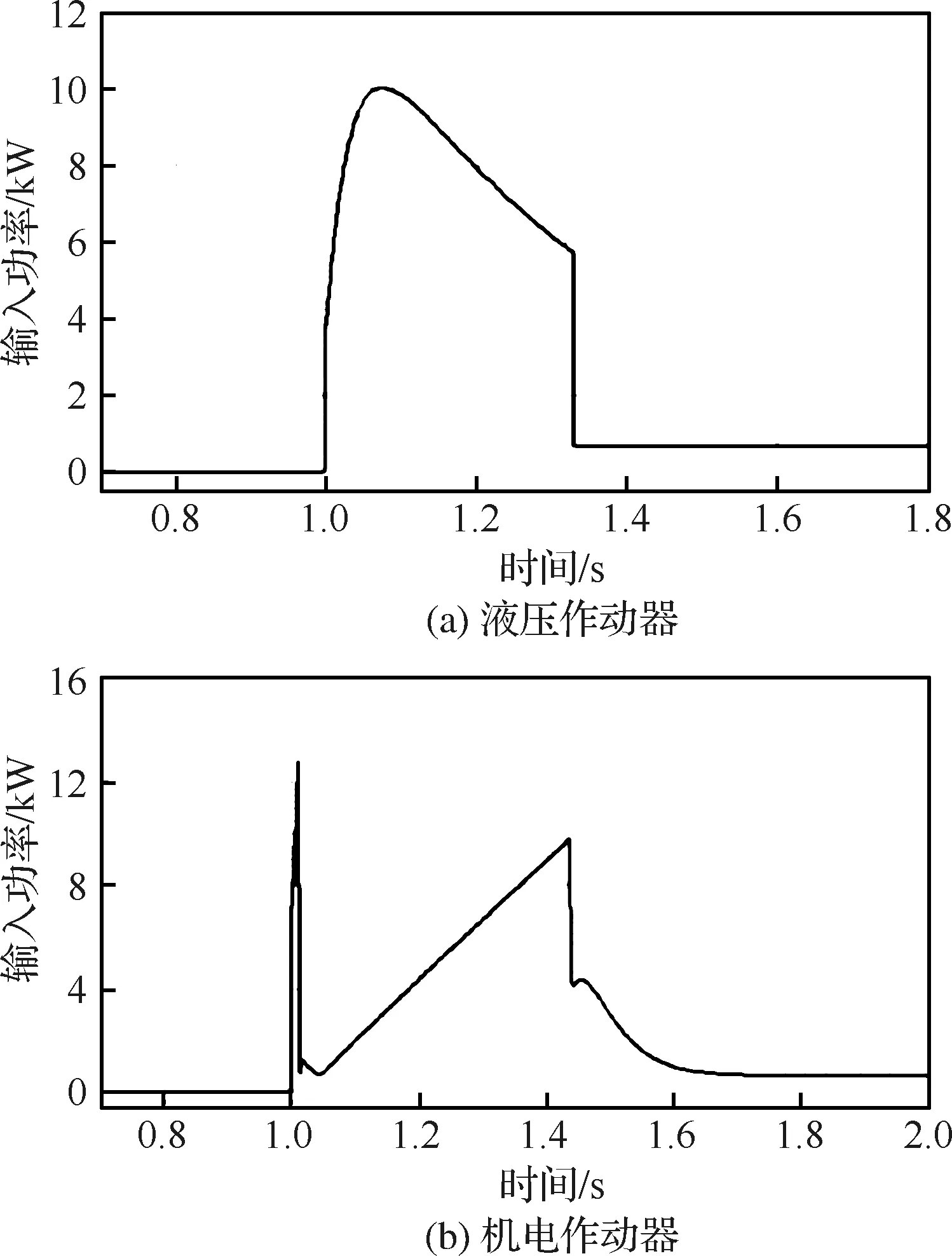
圖12 脈沖形狀的作動器輸入功率
對于圖12所示的脈沖功率特性,很難簡單地用機電設備本身的效率(%)、功率損耗(W)來分析系統的能源特性,因此采用消耗能量(J)進行能耗特性分析。
4.2 作動系統的功率特性仿真
4.2.1 飛行剖面設置
假設飛機完成表4所示的爬升、橫滾、偏航和俯沖4個飛行姿態,將不同舵面控制角度要求輸入到圖11的作動器上作為控制信號。由于采用了能量消耗進行能耗特性的比較與分析,仿真時設計的飛行剖面被壓縮在很短的時間范圍內(32 s)。
對表4所示的飛行剖面進行仿真,得到3種舵機的控制信號如圖13所示。
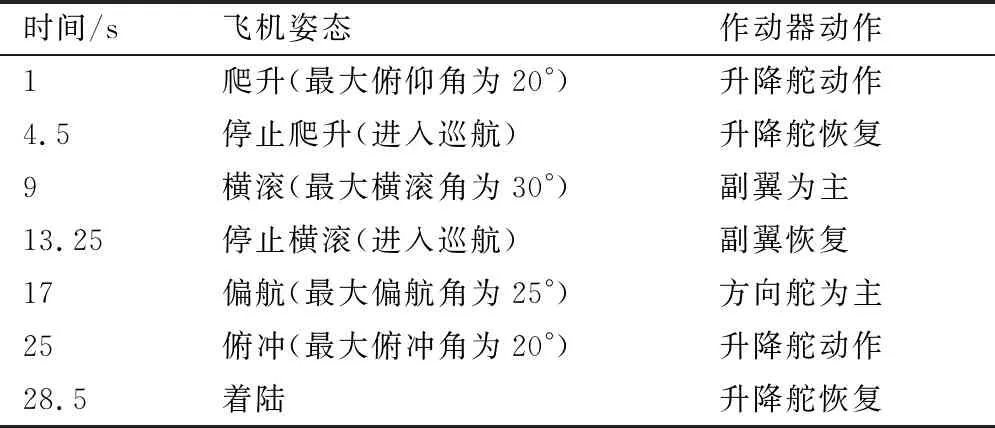
表4 飛機的飛行剖面

圖13 3種舵機的控制信號
4.2.2 機電作動系統功率特性仿真
將圖13的控制信號與圖11(a)的作動器模型連接,進行多電作動系統功率特性的仿真,得到完成飛行任務的功率特性如圖14(a)所示,而發電機從發動機傳動機匣提取的功率如圖14(b)所示。
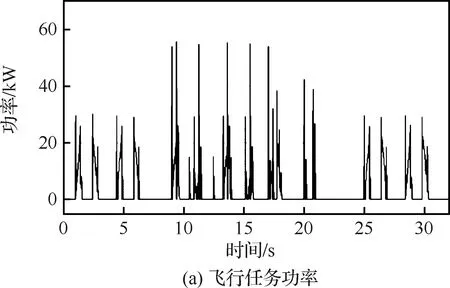
圖14 多電飛控系統的功率特性
4.2.3 液壓作動飛控系統功率特性仿真
將圖13的控制信號與圖11(b)的模型連接,進行傳統作動系統功率特性仿真。得到完成表4的飛行任務的功率特性如圖15(a)所示,而液壓源從發動機傳動機匣提取的功率如圖15(b)所示。多電作動系統和傳統作動系統的能源損耗對比數據如表5所示。
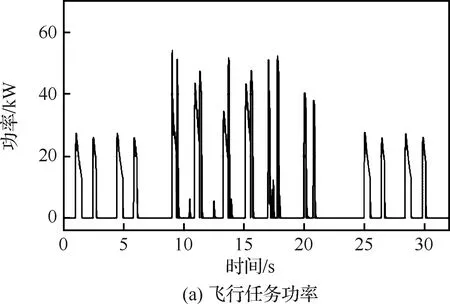
圖15 傳統飛控系統的功率特性

表5 兩種飛機飛控系統的能源損耗
4.3 兩種飛控系統能耗特性比較
根據表5的數據,多電飛控系統在能源利用上存在以下特點:
1) 因為完成相同的飛行任務,同時作動器的效率相近,作動器耗能的差別并不明顯,對整個飛控系統能耗情況的影響不大。
2) 兩種能源在傳送中功率損耗的區別比較大,電纜的傳輸耗能常常可以忽略。而油管路傳輸損耗一般不能忽略。并且飛機越大,則傳送距離越遠、路徑越彎曲,電能傳送的優勢會越明顯。
3) 由于作動器表現的是脈沖負載,式(6)的液壓泵的損耗不會因流量的減小而減小,而發電機的銅損耗會隨電流平方降低,同時,當EMA/EHA負荷減小時,銅損耗、鐵損耗和開關損耗還會進一步降低,這是多電飛機能夠達到能源優化的主要原因。
由以上分析可知,對于作動器類短時工作的設備,采用電力驅動比采用液壓能驅動,在能源利用上具有明顯的優勢。
5 結 論
1) 提出采用一種機電設備的多物理域模型,并集成為多電飛控系統和傳統飛控系統,進行能源利用特性的仿真與分析。
2) 通過2種能源的作動系統耗能特性的仿真數據可知,對于作動器等短時脈沖工作設備,使用電能相比傳統能源形式,在能源傳送、能源變換、能源利用上具有很大的優勢,能夠實現節能目標。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
故事作文·高年級(2021年12期)2021-12-21 02:32:35
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
大電機技術(2017年3期)2017-06-05 09:36:02
光學精密工程(2016年6期)2016-11-07 09:07:19
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
核科學與工程(2015年4期)2015-09-26 11:59:03
電力工程技術(2014年1期)2014-03-20 14:19:06