基于動態邊緣率的長大隧道車輛控速系統構建與效果分析
2021-10-22 09:49:00狄海波李世佳楊飛雄刁成良
工程與建設 2021年4期
黃 兵, 狄海波, 李世佳, 楊飛雄, 刁成良
(1.四川雅康高速公路有限責任公司,四川 成都 610047;2.武漢理工大學,湖北 武漢 430063)
0 引 言
隨著社會的發展,人民生活水平的提高,汽車保有量逐漸上升,交通事故率也隨之增加,據統計,有90%的高速公路交通事故由駕駛員因素導致,其中比例最高的是車輛超速,達到了10%[1],由此可見,超速現象在我國較為多見,形勢嚴峻。因此,為了減輕事故強度、降低事故發生率,必要措施是降低車速和車速差。通常把在某一路段上行駛的所有車輛因速度不同造成的車速不均勻現象稱作車速差,也叫車速離散度。
為降低車速及車速離散度,國內外學者基于視覺信息對駕駛員影響的規律,利用邊緣率改變時空頻率,通過增大路緣標線相對于人眼運動的時間頻率使駕駛員高估車速,進而誘導駕駛員主動采取制動降低車速[2]。國外有學者[3]研究發現,駕駛員會受邊緣標線的影響從而采取降低車速的行為;還有學者[4]發現駕駛員在決策停車距離和跟車距離時會受到邊緣標線的影響,這一結果是通過計算機仿真試驗實現的,并得出了邊緣率和光流率與理想加速度的關系模型。Katz[5]設計了相同距離的邊緣率路面標記實驗,前后試驗的數據對照結果表明車輛平均速度下降了6 km/h。關于國內的研究,杜志剛等[6]根據駕駛員對速度和車距的視覺效應與環境相適應的原則,將視錯覺標線和韻律感曲線相結合,誘導車輛提前減速,使隧道運營安全水平得到了提高。另外還有國內的學者[7-9]研究了駕駛員在行車過程中控制車速或調整跟車間距時邊緣標線的影響模型,模型驗證了能顯著影響車頭時距和車速的主要因素是邊緣率標線的時間頻率、鋪設角度等因素。
但目前的研究都停留在靜態邊緣率的層面,其對所有的車輛均采取同一控速方案,針對性較低。
鑒于此,本文以現階段的靜態邊緣率算法模型,設計系統內部控制邏輯圖,構建動態邊緣率控制系統,使控速系統更具針對性,提高隧道運營安全。同時還設置靜態邊緣率對比實驗,分析動態邊緣率的降速效果。
1 適用性分析
邊緣率的研究主要集中在高速公路,現階段對于隧道內的邊緣率研究較少,鑒于隧道內的環境與高速公路環境存在著差異,其亮度不足、有害物質濃度高、噪聲大、能見度小、壓迫感強、景色單一。研究表明,一定濃度的有害物質會對駕駛員的身體健康造成一定程度的損害,甚至使得駕駛員反應遲鈍,影響駕駛員行車安全;過大的噪聲會導致駕駛員煩躁不安、專注力下降,應急反應能力下降;隧道內強烈的壓迫感以及單一的景色會使駕駛員下意識加速。因此有必要分析在隧道內應用邊緣率標線的適用性。
邊緣率指的是在單位時間內路緣間隔標志物穿過駕駛員視野邊緣的數量,在邊緣率周期已知的情況下,駕駛員就可以通過邊緣率來對行駛速度進行一個主觀感知。如果邊緣率增大,那么駕駛員的感知速度也就隨之增大。
邊緣率的定義公式如公式(1)所示:
f=v/λ
(1)
式中:v為速度,m/s;λ為邊緣率周期長度,m;f為邊緣率,Hz。
邊緣率的改變主要是時空頻率的改變,Shen[10]通過實驗發現并驗證了感知速度與時空頻率的函數關系,如式(2)所示,由式(2)可知時空頻率與主觀感知速度和物理速度都有聯系。
(2)
式中:Vp為感知速度,m/s;V為物理速度,m/s;ft為時間頻率,Hz;fs為空間頻率,cycles/s;n為擬合參數。
在行駛過程中,物理速度一定時,時空頻率越大,駕駛員在單位時間內看到的路緣標志物就越多。單位時間內駕駛員視野邊緣里通過的路緣標志物越多,駕駛員感知到的速度就越大,導致高估車速。
由此可知,邊緣率正好利用駕駛員感受到時空頻率改變獲取的視覺信息來高估實際車速,從而讓駕駛員下意識做出踩剎車的駕駛行為,達到降速的效果,提高隧道行車安全。但鑒于隧道內環境特點,利用普通的路面邊緣標線的控速效果不佳。而且本次的控速方式為動態邊緣率控制,因此考慮使用LED燈來達成動態邊緣率效果。選取白色作為LED燈的顏色,與其他顏色相比白色能夠提供更亮的照明效果,除此之外還能夠有效減輕駕駛員的眼部疲勞,使駕駛員更專注于駕駛,另外白色的辨認效果較好[11],因此LED燈的顏色選用白色,其亮暗比為1∶1。
2 邊緣率LED燈動態控速系統構建
2.1 系統組成
邊緣率LED燈控速系統包含測速儀、配電箱、LED燈控制終端、車速控制終端、第一無線數據傳輸模塊、第二無線數據傳輸模塊、邊緣率LED燈燈設備,該系統如圖1所示。
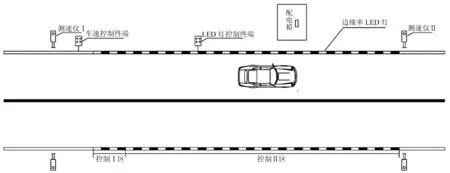
圖1 基于動態邊緣率的LED燈控速系統
2.1.1 測速儀
測速儀,如圖2所示,分為測速儀Ⅰ和測速儀Ⅱ,分別安裝于系統的開端和末端。測速儀Ⅰ被用來記錄起點車速;測速儀Ⅱ被用來記錄終點車速。通過對比起點車速和終點車速的參數,判斷駕駛員是否受系統影響采取了一定的減速行為,從而檢驗邊緣率LED燈的動態控速效果如何。

圖2 測速儀
2.1.2 車速控制終端
車速控制終端用于存儲邊緣率LED燈控制方案,它被安裝于邊緣率LED燈和測速儀之間,
2.1.3 無線通信模塊
無線通信模塊用于將LED燈控制方案無線傳輸至LED燈控制終端。
2.1.4 LED燈控制終端
LED燈控制終端用于接收方案并產生燈控信號,并將信號傳輸至邊緣率LED燈。
2.2 控速系統構建
2.2.1 速度采集
考慮到隧道路段環境的特殊性,為了避免對隧道內車輛的正常運行造成影響,保證采集的車速數據的有效性,同時保證采集者的人身安全,選用NC-200地磁型交通流檢測器作為隧道路段內車速采集設備。同時采用雷達槍對車速數據進行隨機采樣,與檢測器結果進行對比,若車速數據的差距過于顯著,則重新采集直到數據樣本有效,車速采集設備如圖3所示。

圖3 NC-200地磁型交通流檢測器和雷達槍
車速數據采集時段為白天,車速數據采集交通流條件為自由流交通。
2.2.2 動態控速方案
通過速度采集設備采集到的車速以及系統鋪設路段的限速值,確定最高車速vmax,減速目標車速vt。即控速樣本對象為車速處于[vt,vmax]內的超速車輛。以區間長度Δv為單位,對超速區間進行劃分,從減速目標車速vt開始,每隔Δv劃分一個控速區間,速度區間為[vt,vt+Δv]、[vt+Δv,vt+2Δv]…,則第m個控速區間為[vt+(m-1)Δv,vt+mΔv],r∈[1,M],其中M為(vmax-vt)/Δv,為控速區間數量,取整值。剩余的車速區間[vt+MΔv,vmax]將被合并至第M個控速區間作為一個控速區間。由于采集速度的局限性,系統鋪設后最高車速可能高于vmax,但數量較少,因此將其合并至第M個控速區間作為一個控速區間。按照圖4所示的流程計算每個速度區間的周期長度值和鋪設總長度,可將系統控制方案簡化為表1所示M+1種模式。
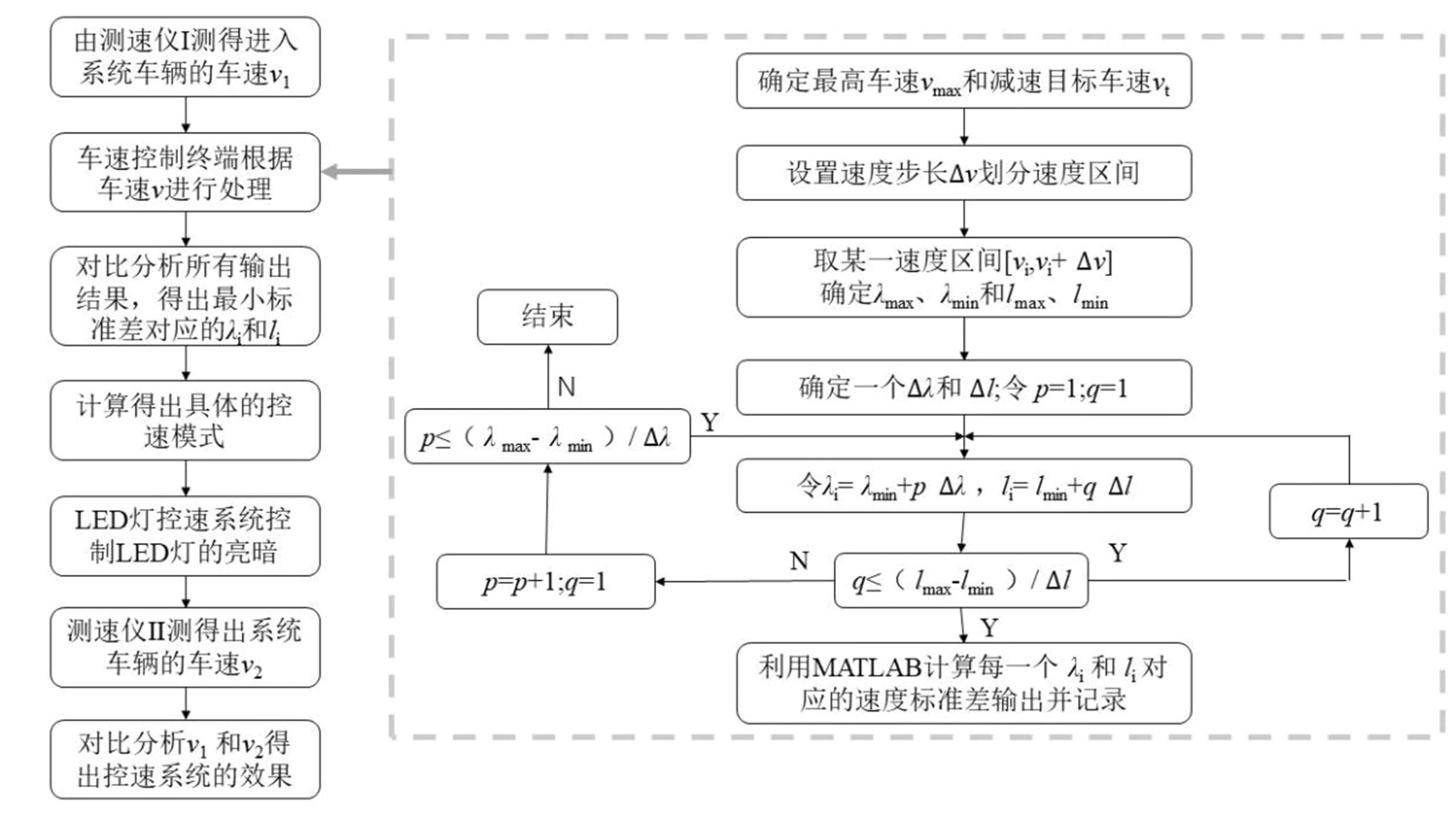
圖4 動態控制方案算法框架
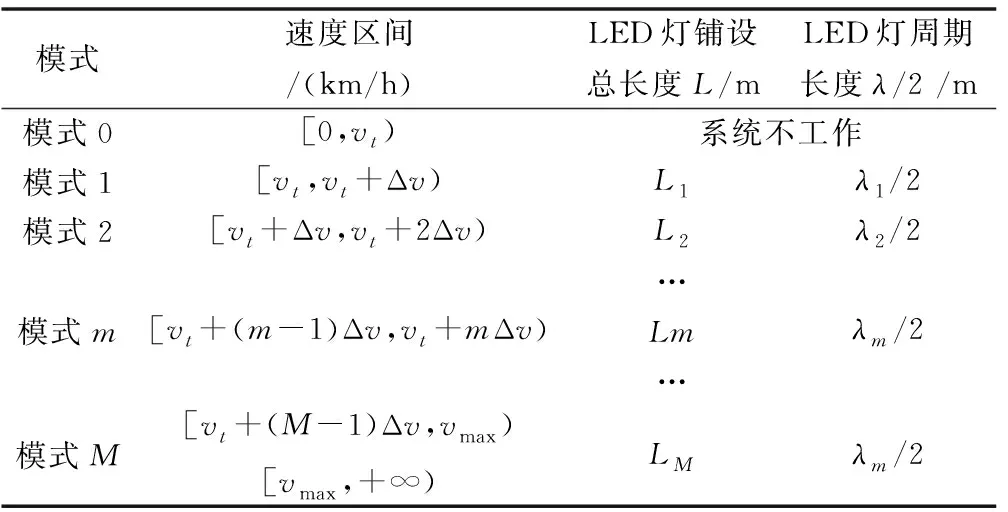
表1 動態系統控制方案
2.2.3 系統電路控制方案
邊緣率動態控制系統內部的控制邏輯圖如圖5所示,由測速儀Ⅰ測出進入系統車輛的車速,與表1中的速度劃分區間進行對比,得出m,再通過LED燈控速終端中的內置MATLAB控制程序,控制單刀多擲開關和多到多擲開關都接至m擋,此時該電路控制就會輸出Lm和λm/2,從而使LED燈處于模式m,對系統內的車輛進行有針對性的控速。其中每個控制器的主要是控制LED燈的輸出長度,根據表1中的模式進行計算,確保每一個擋輸出的是該模式下的鋪設總長度和周期長度。
圖5 內部控制邏輯圖
3 效果分析
為了驗證邊緣率LED動態控制系統,選取二郎山隧道安裝該系統,隧道全長13.4 km,設計速度和限速值都為80 km/h。通過兩種速度采集裝置采集到的車速確定最高車速為105 km/h,減速目標車速75 km/h。經過圖4所示的流程計算,M取3共計4種模式及每種模式對應的周期長度值和鋪設總長度,見表2。
表2 動態系統控制方案(隧道兩側模式相同)
由表2可知,安裝在二郎山的動態控制系統中各模式的L和λ存在重復,因此可將電路控制邏輯圖簡化,如圖6所示。
圖6 二郎山控制邏輯圖
將邊緣率LED燈動態控制系統安裝后,在二郎山隧道安裝系統并進行調試,現場如圖7所示。邊緣率LED燈動態控速系統的布設完成后,車輛運行狀態下邊緣率現場效果如圖8所示。
圖7 實地安裝與系統調試

圖8 車輛運動狀態下邊緣率
系統安裝試運行一段時間后,收集了一天的車速數據,且數據符合正態分布。分析處理得到安裝前后的平均速度、速度標準差和各區間速度比例,結果如圖9所示。由圖9可以看出控速系統效果明顯,途徑車輛的速度明顯發生了降低,駕駛員采取了一定的減速行為,平均車速和車速標準差分別下降了7.96%和13.45%。
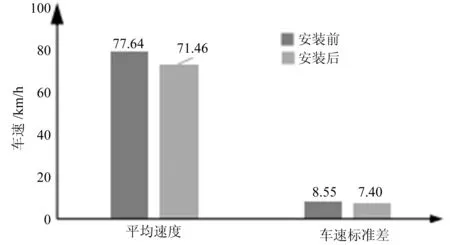
圖9 安裝邊緣率LED燈動態控速系統前后的車速指標對比
為了驗證動態邊緣率控速系統的效果,設計了6組靜態對比實驗,見表3,通過MATLAB編程控制隧道兩側處于不同的模式,并且該模式不隨進入車輛的速度發生改變。

表3 6組靜態對比方案
利用車速控制終端內的MATLAB程序,控制LED燈按照靜態設計方案實行亮暗,每種靜態方案采集半天實驗數據,對數據進行處理,其結果如表4。由于二郎山隧道通車不久,其交通量較低,劉瑩瑩等[12]的研究認為該路段車流處于穩定時其不同密度車速標準差介于5~15 km/h范圍。由表4發現動態方案和靜態6組方案的標準差都處于穩定的范圍,因此在車流處于穩定的前提下,僅考慮平均車速,發現動態邊緣率對平均車速的降低值最大,認為動態邊緣率降速效果更佳。
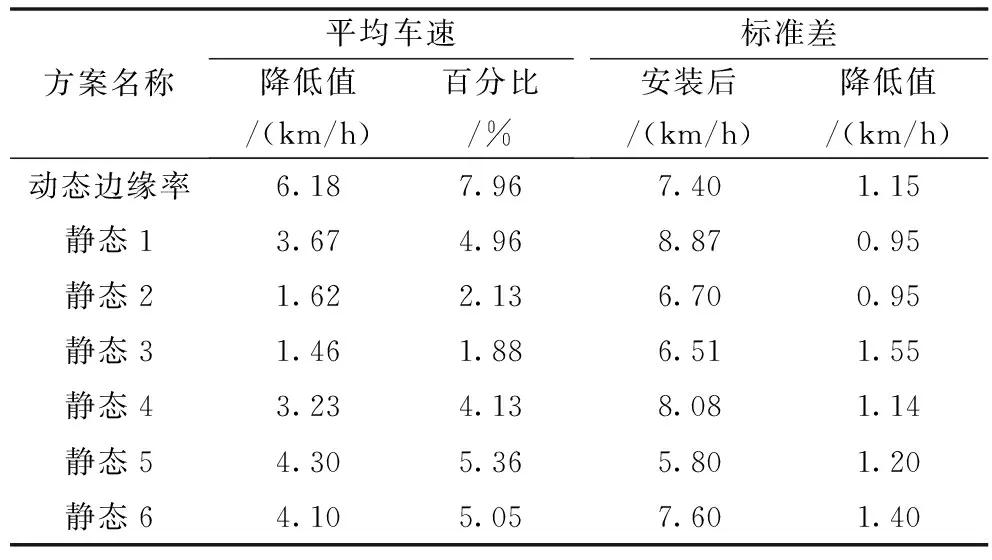
表4 六種靜態對比方案與動態邊緣率效果對比
4 結 論
(1) 本文為改進靜態邊緣率控速針對性的不足,提出了動態邊緣率控速系統框架,并設計系統內部控制邏輯圖,以平均車速和車速標準差作為降速目標,構建了針對性更強的動態邊緣率控制系統。
(2) 為驗證該動態系統的有效性,在二郎山隧道進行實地安裝,經統計分析發現該動態系統安裝后能進行有效控速。
(3) 針對動態系統設置了6組靜態對比實驗,發現在車流處于穩定的前提下,動態邊緣率系統較靜態邊緣率模型能更具針對性地進行控速。
論文構建的內部控制系統主要是邏輯層面,內部的電路及現場鋪設的復雜性有待進一步研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
汽車電器(2018年1期)2018-06-05 01:22:54
家庭影院技術(2017年9期)2017-09-26 03:41:45