永磁同步電機改進型雙矢量模型預測電流控制*
2021-10-23 06:27:04胡明茂
電機與控制應用 2021年9期
楊 鋒, 胡明茂, 陳 鑫,2
(1.湖北汽車工業學院 機械工程學院,湖北 十堰 442002;2.奇瑞商用車有限公司,安徽 蕪湖 241000)
0 引 言
永磁同步電機(PMSM)具有結構簡單且控制精度高等許多優點,目前已經廣泛應用于各種不同領域[1-2]。隨著計算機和現代控制理論的發展,出現了許多不同的電機控制方法。矢量控制和直接轉矩控制是應用最為廣泛的控制方法,這2種方法也是到目前為止比較成熟的控制策略[3-5]。除了這2種方法之外,模型預測控制(MPC)越來越受到眾多學者的關注。MPC可分為無限型和有限型控制集模型預測控制[6]。有限型控制集模型預測控制利用了電壓型逆變器的離散開關狀態進行優化。對控制對象進行仿真建模,計算出電機對開關狀態的響應,并且對開關狀態進行評估,選擇出最佳響應對應的電壓矢量作用到逆變器中。
然而傳統的MPC在每個采樣周期只能選擇一個電壓矢量作用到逆變器中,很難得到滿意的系統穩定性。在此基礎上,許多學者將占空比控制引入到傳統的MPC策略中。文獻[7-11]均是通過在傳統的MPC中加入占空比控制,占空比是用零矢量和1個有效矢量進行的計算得到,該方法得到了良好的系統穩定性。但該方法也有缺陷,零矢量不一定得到全局最優,因此需要將電壓矢量組合放到2個有效電壓矢量,豐富了電壓矢量的組合且增加組合的可能性。也有很多學者從多橋臂逆變器角度入手,來提高電機的穩態波動。文獻[12]提出了一種五橋臂逆變器單矢量模型預測電流控制(MPCC),利用一個有效矢量和零矢量進行占空比計算,減少了電磁轉矩的波動。文獻[13]在文獻[12]的基礎上改進了占空比算法。主要利用無差拍原理,得到2臺電機q軸電流跟蹤到參考值需要的時間,選出合適的有效矢量,提高了系統的運行性能。文獻[14]對電壓組合所有的可能性進行評估,選擇出最優電壓矢量及其作用在電機上的時間,但是同時也增加了計算量。文獻[15]通過q軸無差拍原理來解決電壓矢量開關組合順序問題,但開關組合的次數還是偏大,計算繁瑣。
本文主要以PMSM為研究對象,在傳統單矢量MPCC基礎上,提出一種改進的雙矢量模型預測電流控制(TV-MPCC),每個扇區用零電壓矢量和1個有效電壓矢量或者2個有效電壓矢量合成1個期望電壓矢量,從而增加電壓范圍覆蓋方向和幅值,利用價值函數最小值原理,選出最優電壓矢量。仿真表明所提出的方法具有較好的可行性和有效性。
1 PMSM數學模型
依據電機學原理,表貼式PMSM在旋轉坐標系d-q下的定子電流狀態方程可表示為[16]

(1)

(2)
式中:ωre為轉子電角速度;ψf為轉子磁鏈;Ld、Lq分別為定子d、q軸電感;Rs為定子電阻;ud、uq分別為定子電壓d、q軸分量。
通過歐拉法對式(1)和式(2)進行離散化處理可以得到:

(3)

(4)
Ed(k)=ωre(k)Lsiq(k)
(5)
Eq(k)=-ωre(k)Lsiq(k)-ωreψf
(6)
式中:id(k)、iq(k)分別為在當前時刻d、q軸的電流值;id(k+1)、iq(k+1)分別為下一個采樣時刻d、q軸的電流預測值;Ts為采樣周期;Ed(k)、Eq(k)分別為在當前時刻d、q軸的電機反電動勢;ud(k)、uq(k)為當前時刻d、q軸的電壓值。
2 改進型TV-MPCC
在矢量控制中用到了2個電流環進行控制,而在傳統的單矢量MPCC中只有1個速度PI環,這樣PI參數的整定在很大程度上得以簡化。MPC可以把不同的模型加入到價值函數中進行考慮,本文采用的控制目標為,電機d、q軸的電流能夠跟隨其參考給定值,以定子電流d、q軸分量與參考值的差的絕對值的和作為價值函數。

(7)
在1個采樣周期中,有8種開關狀態可以選擇,其中包含了2個零矢量和6個有效矢量。在第i(i=0,1,2…7)個電壓矢量作用下,結合電壓重構,由價值函數預測下一時刻的d、q軸電流值。
2.1 TV-MPCC原理
本文提出的PMSM TV-MPCC在每個扇區的期望電壓矢量通過2部分合成,第1部分期望電壓矢量由一個有效矢量和零矢量合成,第2部分期望電壓矢量由2個有效矢量合成。根據價值函數最小值原理,把這2部分得到的期望電壓矢量代到價值函數中進行比較,最小值對應的期望電壓即為最優期望電壓。表1為有效電壓矢量和零矢量合成期望電壓矢量,表2為2個有效電壓矢量合成期望電壓矢量。

表1 有效電壓和零矢量期望電壓矢量合成

表2 兩個有效值期望電壓矢量合成
改進的MPCC框圖如圖1所示,控制策略采用的是id*=0,q軸電流給定值是通過速度環PI控制器得到。在模塊TV-MPCC中,2部分的期望電壓矢量作用時間ti,tj可以通過電流給定值和反饋值計算得到。
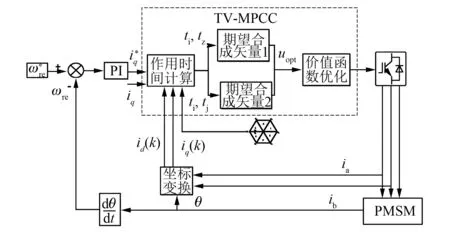
圖1 TV-MPCC系統控制框圖
2.2 矢量作用時間計算
在計算矢量作用時間時,不但需要考慮d軸無差拍跟蹤,還需要考慮q軸無差拍跟蹤。可以通過式(1)、式(2)得到零電壓矢量作用的時間,dq軸電流斜率的計算式:

(8)

(9)
在式(1)和式(2)中,可以得到2個相鄰的有效電壓矢量ui、uj作用時,d軸和q軸電流的斜率為

(10)

(11)

(12)

(13)
式中:udi、udj、uqi、udj分別為ui、ui在d、q軸的電壓分量。
在第1部分中,采用有效矢量和零矢量進行作用。根據無差拍原理,下一采樣時刻電流預測值等于給定值,因此d、q軸的電流預測公式可以改為

(14)

(15)
式中:ti為ui的作用時間;tz為零矢量的作用時間。
2個電壓矢量作用總時間為Ts。即滿足:
Ts=ti+tz
(16)
通過式(8)~式(16)可以得到:

(17)
tz=Ts-ti
(18)
計算出ti、tz以后,需要判斷是否在0~Ts中,如果ti<0,則ui作用時間為0,全部由uj作用整個周期。若ti>Ts,則ui作用時間為Ts,uj作用時間為0。
在第2部分中,采用2個有效電壓矢量進行作用。同理可得,d、q軸的電流預測公式可以改為

(19)

(20)
并且滿足:
Ts=ti+tj
(21)
通過式(8)~式(13)和式(19)~式(21)可以得出:

(22)
tj=Ts-ti
(23)
根據計算得到的ts、tj值進行判斷。如果ti<0,則ui作用時間為零,全部由uj作用整個周期。若ti>Ts,則ui作用時間為Ts,uj作用時間為零。
2.3 期望電壓矢量合成
由就近原則可知,期望電壓矢量通過零矢量和有效矢量合成,或者通過2個有效矢量合成。每個扇區只能合成一個期望電壓矢量,6個扇區可以合成6個期望電壓矢量,因此通過12次預測選擇出最優電壓矢量。圖2為零矢量和有效矢量合成圖,圖3為2個有效矢量合成圖。
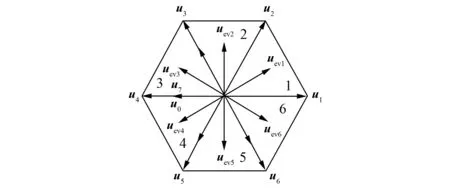
圖2 零矢量和有效電壓矢量合成圖

圖3 2個有效矢量合成圖
計算2部分期望電壓矢量時,第1部分期望電壓矢量可以根據式(17)、式(18)計算出零電壓矢量和有效電壓矢量作用時間,再根據式(24)和式(25)計算2個交軸的期望電壓矢量分量:
(24)
(25)
同理,第2部分期望電壓矢量可以根據式(22)、式(23)計算出2個有效電壓矢量作用時間,再按照式(26)、式(27)計算2個交軸的期望電壓矢量分量:
(26)
(27)
TV-MPCC策略具體步驟為
(1) 通過采樣,得到當前時刻的電流值,再根據式(8)~式(13)得到電流率。
(2) 根據表1和表2選擇基本電壓矢量,用式(17)、式(18)、式(22)、式(23)計算得到2部分的作用時間。
(3) 根據式(24)~式(27)分別計算2部分電壓矢量的d軸和q軸分量。
(4) 把2部分計算得到期望電壓矢量的d軸和q軸分量代入到式(3)和式(4)中,分別得到2部分d軸和q軸的電流預測值。
(5) 把2部分計算出的電流預測值分別代入到價值函數中,將價值函數最小值對應的電壓矢量作用到逆變器中。
3 仿真與分析
在MATLAB/Simulink環境中搭建仿真模型,驗證改進的TV-MPCC算法的有效性和可行性,并對仿真結果進行研究分析,表3給出了仿真時PMSM的主要參數。
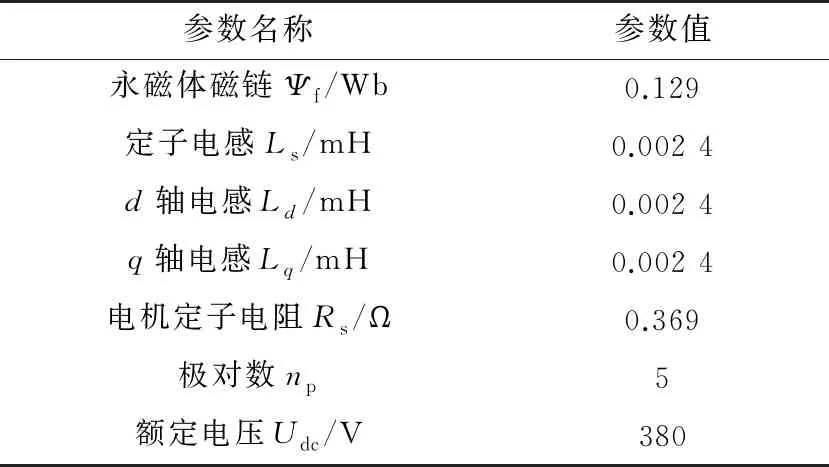
表3 PMSM主要參數
為了證明本文算法的可行性,在同樣條件下搭建傳統單矢量MPCC系統仿真模型,采樣時間為0.000 01 s。仿真時間為1 s,在0.6 s時施加負載10 N·m,在0.8 s時負載突變為5 N·m。輸出的轉矩如圖4所示。
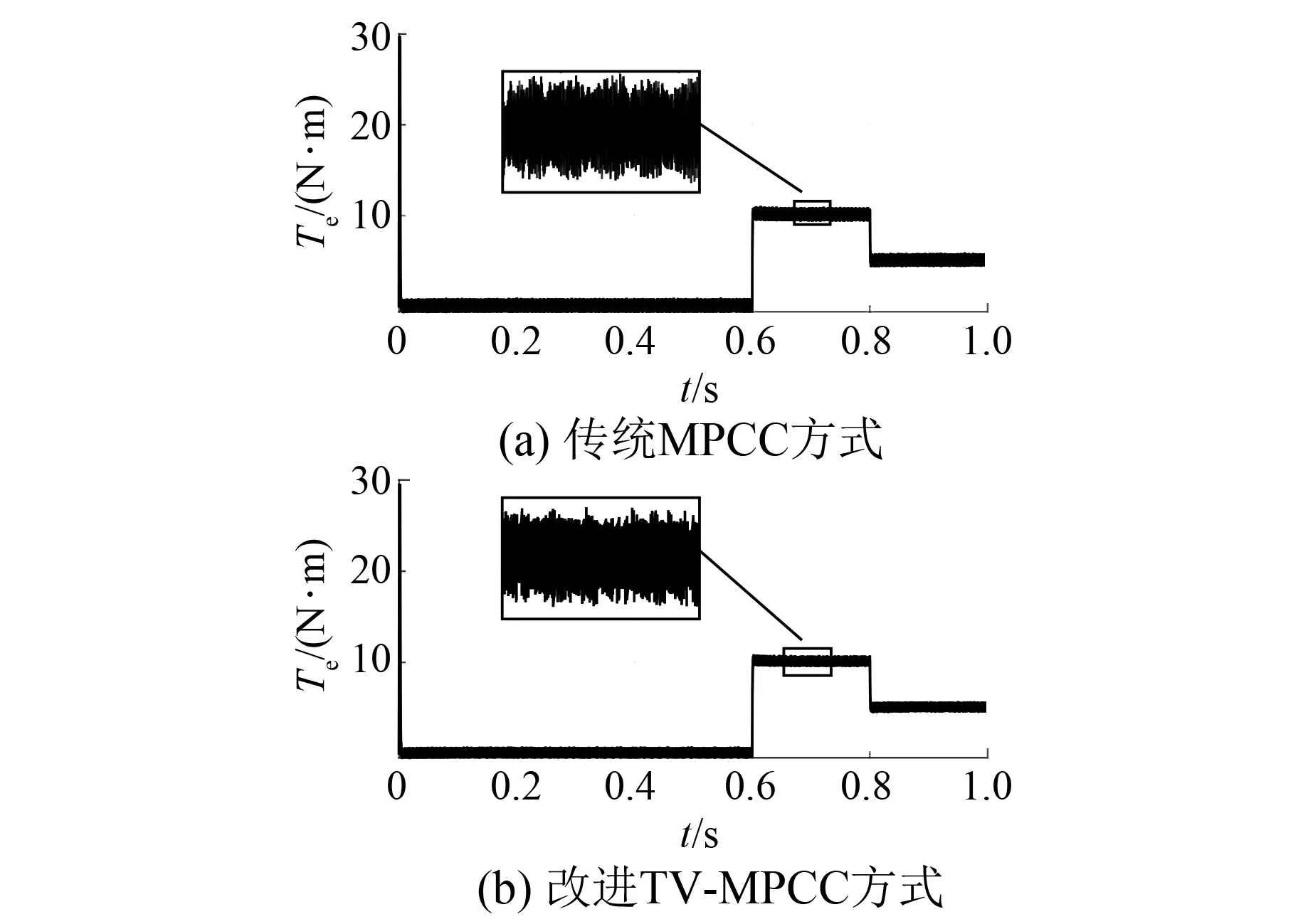
圖4 MPCC轉矩波形
圖4(a)中傳統的單矢量MPCC仿真結果圖顯示,當轉矩發生突變時,轉矩波動較大。采用TV-MPCC時,由于雙矢量控制增加了2個有效矢量合成和有效矢量與零矢量合成,再從其中選出最優矢量,最優矢量可選范圍增加。與傳統MPCC相比,空載時穩態下的轉矩誤差(標準差)減小了4.4%,負載為10 N·m時,轉矩誤差減少了3%,轉矩誤差負載為5 N·m時,減少了4.68%。說明了本文提出的方法對轉矩穩態性能有一定的提高。
圖5給出了傳統MPCC和改進TV-MPCC的轉速波形,電機起動時,改進的TV-MPCC的轉速超調量和傳統控制方法相差不大。當波形穩定時,兩者波形基本沒有波動。證明了改進TV-MPCC對電機起動后轉速環性能沒有影響。
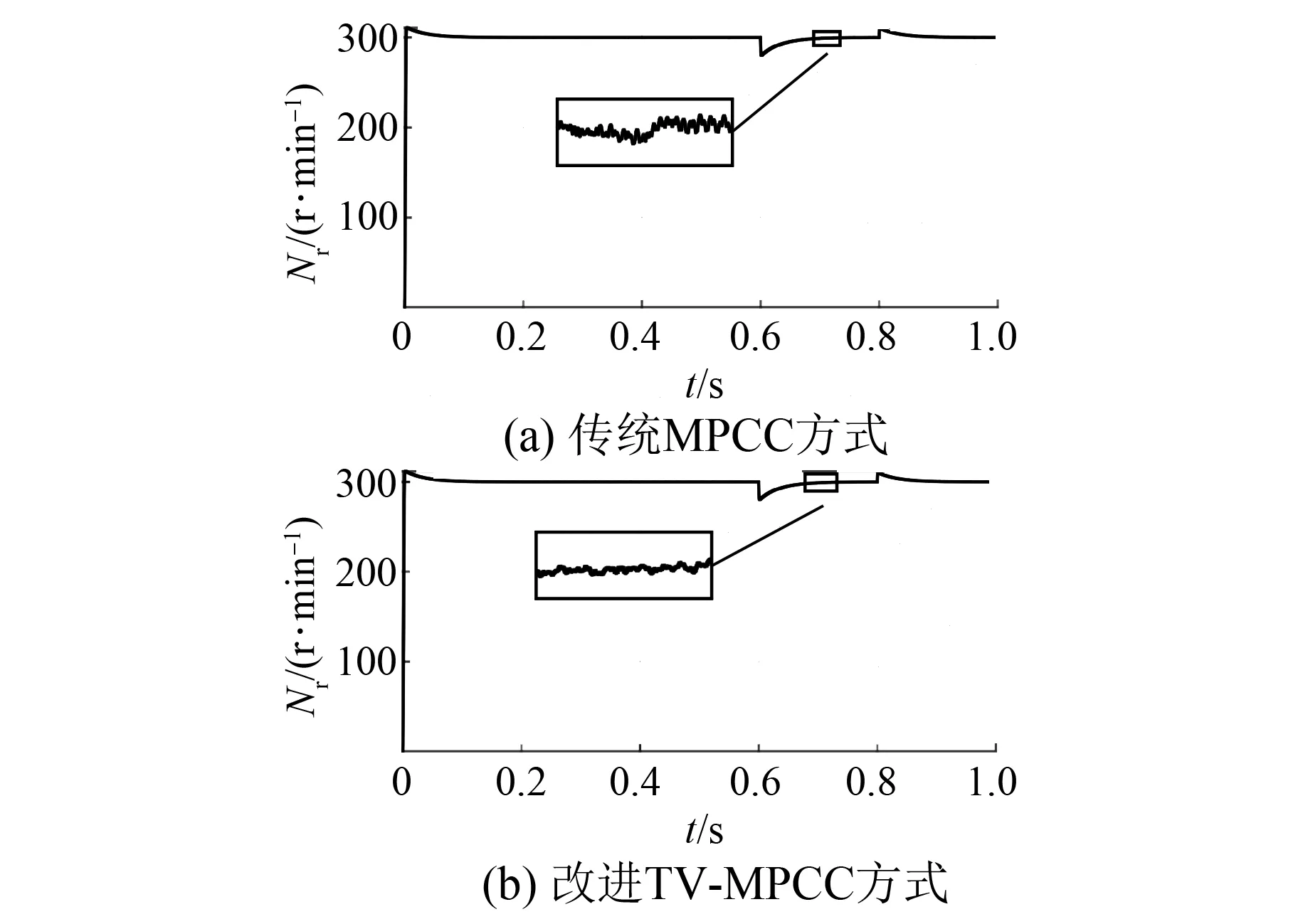
圖5 轉速波形
圖6為2種方法的d、q軸電流波形。改進TV-MPCC在起動后,很快達到了穩態,在穩態時改進TV-MPCC的電流和轉矩比傳統MPCC幅度有所降低。由圖7可以看出a相電流波動也有所降低。

圖6 d、q軸電流波形
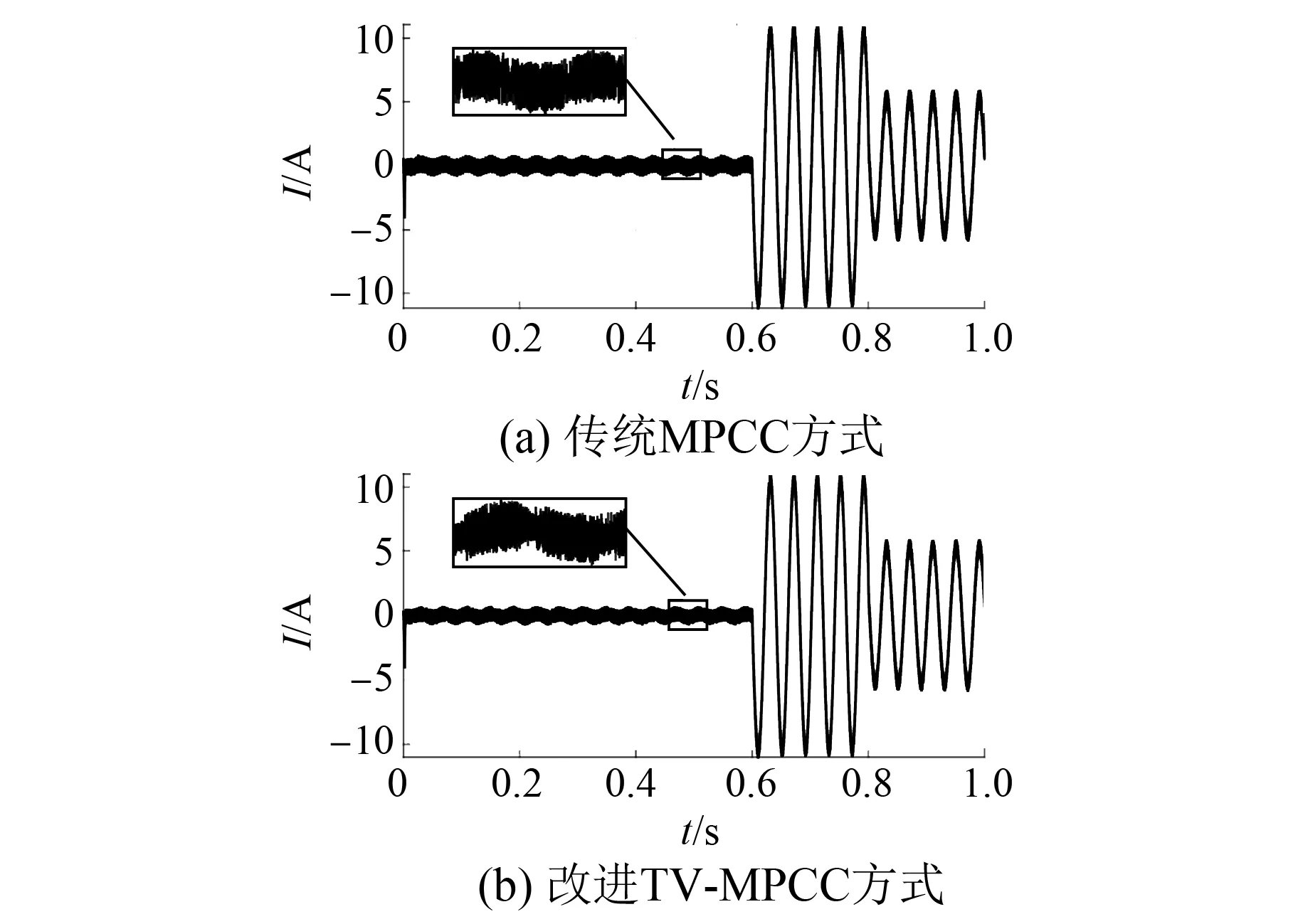
圖7 電機定子a相電流波形
為了將不同控制方法的誤差值進行對比,用To Workspace模塊將Simulink中傳統的轉矩id,iq軸的電流數據和改進后的轉矩,id、iq軸的電流數據傳到MATLAB工作區,形成離散數據。再用std函數(標準差函數)分別求出它們在0~0.6 s,0.6~0.8 s,0.8~1.0 s的標準差。標準差計算公式為

(28)
式中:σ為標準差;xn為某一時刻的轉矩或者電流值;μ為本組數據的平均值;N為本組數據的總個數。
表4顯示了不同控制方法的誤差。

表4 不同控制方法的誤差
結合圖6和表4可以看出,改進TV-MPCC對id、iq軸電流有明顯的控制效果。由此可以證明改進TV-MPCC的有效性。
4 結 語
本文在傳統單矢量MPCC基礎上,提出了一種改進TV-MPCC策略。在改進型控制策略中,期望電壓通過零矢量和有效矢量合成,或者通過2個有效矢量合成。根據價值函數最小值原理,在期望電壓矢量中選出最優電壓矢量。提出的TV-MPCC對比傳統單矢量MPCC,能夠降低電流脈動,實現無差拍控制。系統的穩定性在一定程度上得到改善,提高了電流的控制精度。