無刷雙饋獨立發電系統的改進無參數預測電流控制
2021-10-24 15:00:08陳俊杰黃守道
電工技術學報 2021年19期
徐 偉 陳俊杰 劉 毅 黃守道 高 劍 黃 誠
(1.強電磁工程與新技術國家重點實驗室(華中科技大學)武漢 430074 2.湖南大學電氣與信息工程學院 長沙 410082 3.湖北環一電磁裝備工程技術有限公司 武漢 430205)
0 引言
無刷雙饋感應發電機(Brushless Doubly-Fed Induction Generator,BDFIG)是一種新型交流感應電機。BDFIG的定子包含兩組不同極對數的獨立繞組,即功率繞組(Power Winding,PW)和控制繞組(Control Winding,CW)[1]。與雙饋感應發電機相比,無電刷、無集電環的雙饋感應發電機具有使用壽命長、可靠性高、維護成本低等優點[2]。BDFIG既可用于并網發電,也可用于獨立發電,在風力發電和船舶軸帶發電領域具有廣闊的應用前景[3]。
BDFIG運行時具有異步電機的特點,異步電機控制策略經改進后可應用于BDFIG[4]。目前標量控制[5]、矢量控制[6]、直接轉矩控制[7]等幾種經典控制方法已應用于BDFIG系統,但以上傳統的控制策略都有各自的優缺點。BDFIG標量控制具有控制算法簡單、無需辨識電機內部參數、對控制器要求不高等優點,但其動態響應較慢,尤其是抗負載擾動能力差[8]。BDFIG矢量控制調速范圍寬,還能實現對電機轉矩和功率因數的獨立控制,但該方法對所需參數的精度要求更高,計算更為復雜,這使得電機的動態響應速度在一定程度上受到影響[9]。BDFIG直接轉矩控制策略結構簡單,動態和靜態性能良好,但該方法存在磁鏈和轉矩脈動大,低速運行時難以控制、過程復雜、計算量大等問題[10]。為了進一步提高系統運行性能,國內外學者對BDFIG的新型控制策略展開了研究,包括預測控制、智能控制、模糊控制、無源性控制、自抗擾控制等。其中,預測控制因其概念直觀、易于理解、系統易于非線性化、動態響應快等優點而備受關注[11-12]。
預測控制主要包括無差拍控制、模型預測控制、廣義預測控制等[13]。其中,模型預測控制(Model Predictive Control,MPC)在工業領域的應用更為廣泛。MPC的主要特點是利用系統模型來預測控制變量的未來行為。根據預先定義的優化準則,控制器將通過這些信息來確定最優的功率器件工作方式[14]。目前,MPC已成功地應用于功率變換器和電機驅動,如PWM整流器、感應電機、永磁電機和傳統雙饋電機驅動等[15-21]。在文獻[19-20]的基礎上,文獻[22]提出了一種適用于獨立發電系統的BDFIG模型預測電流控制(Model Predictive Current Control,MPCC)方法。該方法采用MPCC代替傳統的PI電流控制環,使得CW電流可以很好地跟蹤給定電流,因此PW輸出的電壓幅值和頻率也得到了改善,獲得了良好的動態性能。但該方法在一個控制周期內只施加一個電壓矢量,導致CW電流含有較大紋波。對此,文獻[23]提出了一種帶有調制算法的有限控制集MPC策略,通過在每個采樣周期中選擇兩個相鄰的有源矢量以及一個零矢量的調制算法來最小化代價函數。與傳統的有限控制集MPC策略相比,該策略具有電流紋波小、控制精度高等優點,同時保持了傳統方法的高穩態性和快動態響應的特點。此外,文獻[24-25]還分別提出了BDFIG的模型預測功率控制(Model Predictive Power Control,MPPC)和模型預測轉矩控制(Model Predictive Torque Control,MPTC)方法。以上方法均依賴電機數學模型,由于BDFIG電磁特性復雜且部分電磁參數在電機運行的過程中可能會發生變化,因此上述方法在實際工業應用中的效果并不理想,需要一種更加適用于BDFIG的不依賴電機參數的預測控制方法。
近年來,已有學者對模型預測電流控制進行改進[26],基于檢測到的電機狀態信息來判斷電流變化趨勢,形成了一種不依賴電機參數預測控制方法,即無參數預測電流控制(Nonparametric Predictive Current Control,NPCC)[27-29]。該方法雖已在永磁同步電機和同步磁阻電機上進行了實驗驗證,但還未有應用于BDFIG的相關報道[28-29]。由于BDFIG特殊的拓撲結構,其數學模型更為復雜,文獻[28-29]所提出的方法并不能直接應用于BDFIG。基于此,本文提出了一種新的適用于BDFIG的NPCC方法。
1 BDFIG數學模型
1.1 BDFIG基礎模型
本文采用旋轉dq坐標系下的BDFIG數學模型,其中坐標系轉速與CW同步轉速相同[30]。動態數學模型可表示為
式中,U、i、Ψ分別為電壓、電流和磁鏈矢量;ω為角速度;R、L和p分別為繞組電阻、電感和極對數;下標1、2和r分別代表PW、CW和轉子參數。
1.2 應用于BDFIG的MPCC電流預測模型
文獻[22]已將MPCC方法應用于獨立BDFIG控制,其推導出的預測電流表達式為

式中,k為時間;下標d和q分別為d軸和q軸分量;σ2、D2d和D2q均為中間變量。
MPCC的最終目標為實現電流跟蹤和電流幅值限制。這些控制目標可以用式(4)所示的代價函數表示。

式中,i2ref為從PW電壓控制環得到的電流參考值。
2 改進無參數預測電流控制方法
由文獻[25]可知,系統模型參數的敏感性大大限制了MPCC在BDFIG中的應用。因此本文提出了一種不依賴系統參數的改進NPCC方法,該方法可以有效抑制系統參數變化帶來的擾動。NPCC根據測量到的電機狀態信息而不是模型參數來獲得最優電壓矢量,從而跟蹤電流參考值。
2.1 預測電流推導
以d軸電流推導為例,根據式(2)和式(3),可以得到k時刻電流變化值為
根據式(5),k-1、k-2時刻的電流變化值可分別表示為


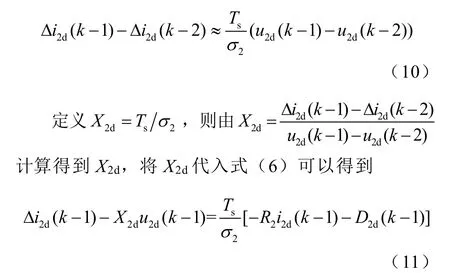
將式(3)代入式(8),相鄰兩時刻的電流變化值之差可以表示為

Δu2d(k?2),A2Δi2d(k?2)以及A1Δi1q(k?2)在不同工況下的值如圖1所示,計算用到的電機參數見表1。

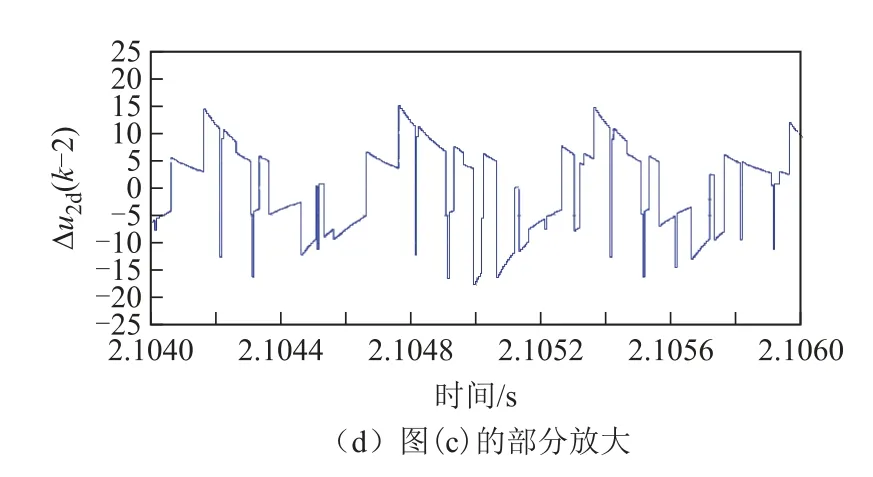
圖1 不同工況下式(9)各項的值Fig.1 Values of different parts in formula(9)under different operation conditions
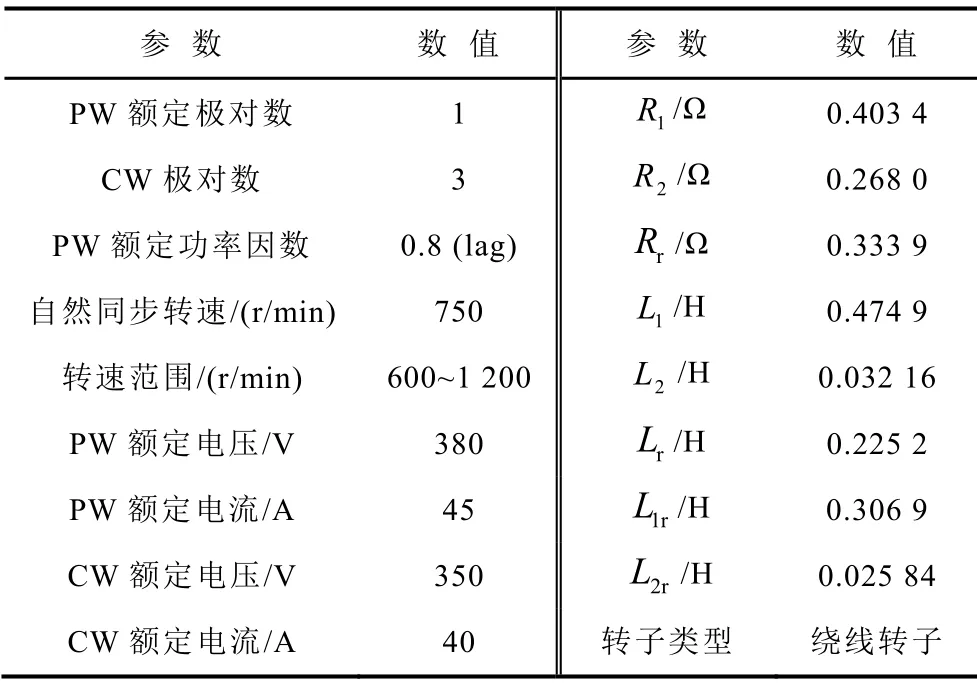
表1 仿真用BDFIG主要參數Tab.1 Main parameters of the BDFIG in the simulation
圖1中的工況為在0.5s時開啟網側變流器,在1.5~2.5s之間將電機轉速從600r/min提高到900r/min,在2.5s時增加一組負載。從圖1可以看出,在此工況下,式(9)后兩項的值小于第一項的值的10%。因此,式(9)的后兩項可以近似忽略。由此得到,i2d(k?1)≈i2d(k?2)、i1q(k?1)≈i1q(k?2),進一步有D2d(k?1)≈D2d(k?2),因此式(8)可以簡化為
根據式(11),可以類推k、k+1時刻的電流變化值為


式中,下標“sw=i”(i∈{0,1,…6,7})表示功率器件的開關狀態為8個可能的開關狀態之一。
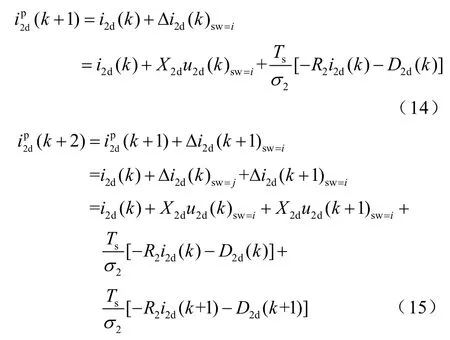
從而,k+1時刻及含有延遲補償的k+2時刻的預測電流值為
式中,下標“sw=i”表示k時刻開關狀態為i。
由前文可知,存在i2d(k?1)≈i2d(k?2)及D2d(k?1)≈D2d(k?2)的近似關系。結合式(11),式(15)可以改寫為

同理可以推導出q軸預測電流表達式為

另外NPCC的代價函數與MPCC相同,如式(4)所示。
2.2 改進NPCC控制方法的實現
本文提出用改進的NPCC方法代替獨立BDFIG控制系統[31]中CW側的傳統PI電流控制環,整體控制結構如圖2a所示。其中改進的NPCC結構如圖2b所示。
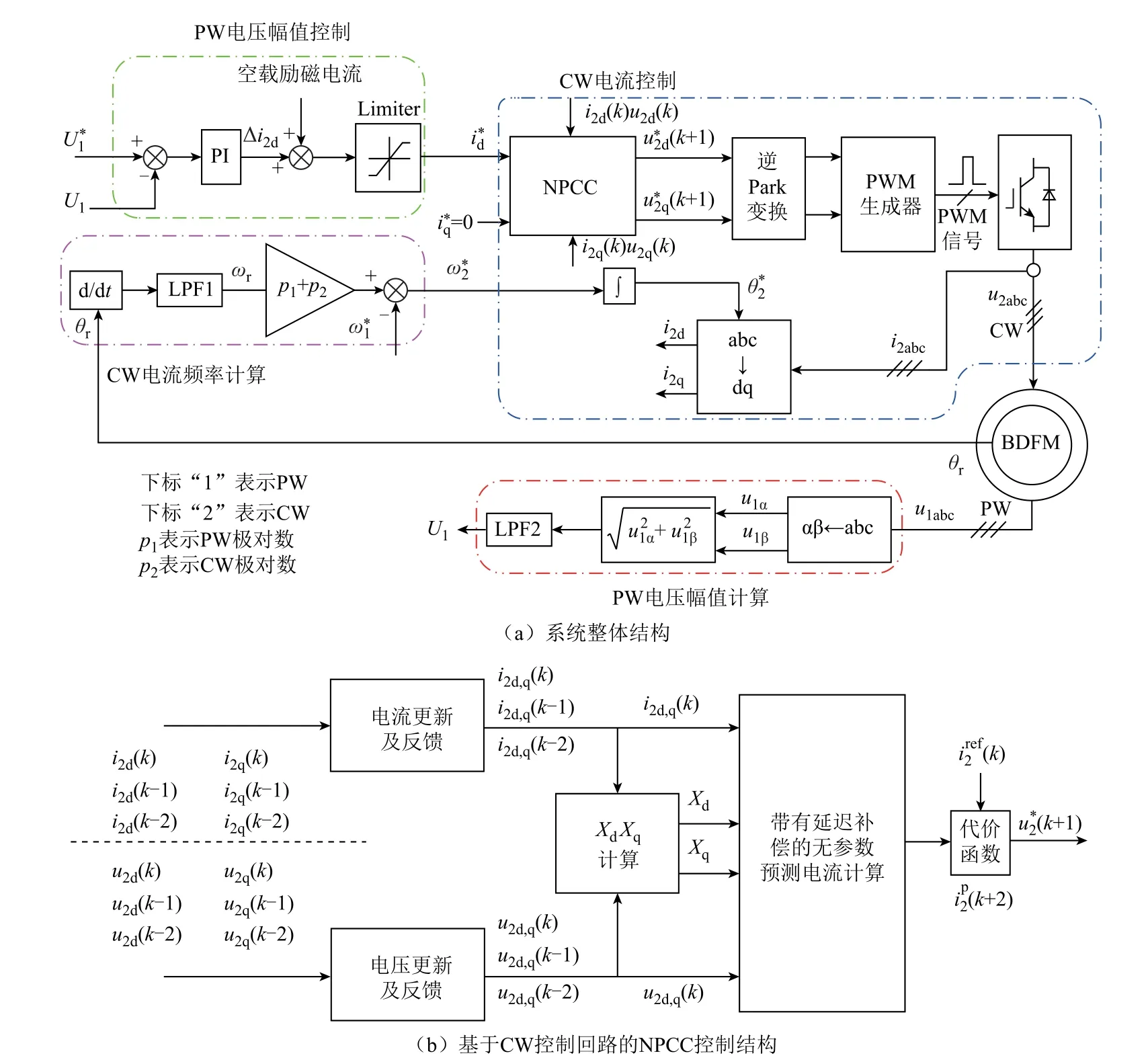
圖2 基于NPCC方法的獨立BDFIG控制方案Fig.2 The NPCC based control scheme for the standalone BDFIG system
結合以上結構,可以看出改進NPCC控制方法實現的一般步驟為:
1)從PW電壓控制回路獲得CW電流的d軸分量參考值,另外q軸分量的參考值設為零,即=0。
2)更新CW電壓和電流信息,即i2(k)、u2(k)、i2(k?1)、u2(k?1)、i2(k?2)及u2(k?2)。
3)計算X2d及X2q,具體步驟如下:
(1)根據式(18)計算CW電流變化值
(2)根據式(19)計算X2d及X2q
從圖 1d可以看出在系統運行的過程中u2d(k?1)≠u2d(k?2)并不總是成立,這將導致X2d計算值過大,影響控制性能。因此作如下近似:在每個采樣周期內,如果>0 .05成立,則根據式(19)計算X2d;如果|u2d(k?1)?u2d(k?2)|≤ 0.05,X2d則需與上一時刻的值保持相同,同理計算X2q。
4)根據式(16)和式(17)計算帶有延遲補償的預測電流值。
5)選擇合適的開關狀態以使代價函數最小化。
6)將得到的d、q坐標系下的最優電壓矢量經過逆Park變換,變換到α、β坐標系中,再經過PWM生成器得到理想的開關序列。
7)將CW電壓參考值對應的開關序列發送到變頻器以生成所需的CW電流。
從上述步驟可以看出,該控制方法不需要任何電機參數,從而可以有效避免因電機參數變化帶來的擾動。
3 仿真驗證
本節對所提出的方法在BDFIG獨立發電系統中兩種典型工況及變電機參數工況下的運行性能進行了仿真驗證。仿真中使用的BDFIG參數見表1。
3.1 X2d、X2q理論值與實際值
由原文理論推導可知,X2d和X2q的理論值為,其中。以恒轉速下變負載工況為例,在仿真中檢驗閾值為0.05時,X2d、X2q的理論值與實際值之間的關系。仿真在次同步轉速(600r/min)下進行,初始負載為一組三相平衡阻性負載,每相阻值為25?。在0.4s時,系統中再增加一組與初始負載完全相同的負載。仿真結果如圖3所示,其中下標-r與-c分別表示實際值和理論值。
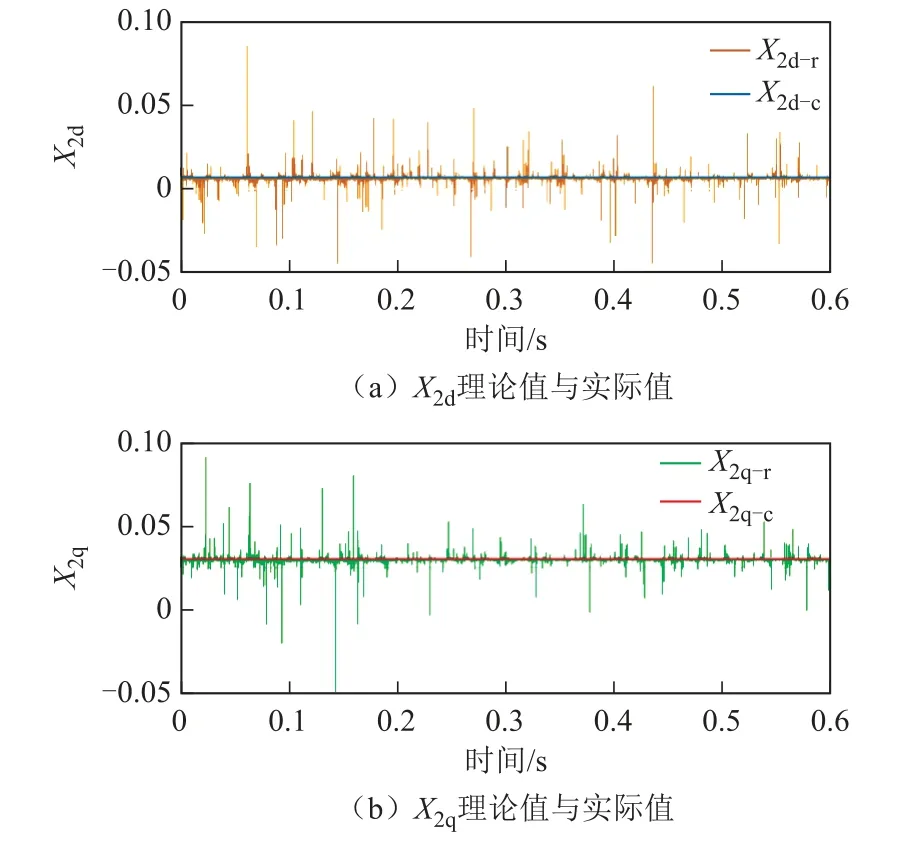
圖3 X2d和X2q的理論值與實際值Fig3 Theoretical and practical values of X2d and X2q
3.2 恒定轉速下變負載
仿真分別在次同步轉速(600r/min)和超同步轉速(900r/min)下進行,初始負載為一組三相平衡阻性負載,每相阻值為25?。2.5s時在系統中再增加一組與初始負載完全相同的負載,其仿真結果如圖4和圖5所示。從圖4a和圖5a可以看出,當負載變化時,PW電壓不會顯著波動,基本能保持恒定的電壓輸出。根據整體控制方案,CW電流d軸分量的參考值為PW電壓幅值控制回路的輸出,CW電流q軸分量的參考值為零。因此,從圖4c和圖5c中可以看到,在突然加載的情況下,CW電流d軸分量的參考值在小幅超調后升高并穩定,而CW電流q軸分量的參考值始終保持為0。采用該方法的控制系統,CW電流d、q軸分量的實際值可以快速穩定地跟蹤其參考值。結果表明,本文提出的基于NPCC的控制方案不僅滿足了系統基本控制要求(即在變負載情況下維持PW電壓的頻率和幅值恒定),而且具有MPCC動態響應快的優點。仿真結果表明,在次同步和超同步速下,所提出的改進NPCC控制方法在負載突變時具有良好性能。

圖4 轉速為600r/min時變負載仿真結果Fig.4 Simulation results under the variable load at the rotor speed of 600r/min

圖5 轉速為900r/min時變負載仿真結果Fig.5 Simulation results under the variable load at the rotor speed of 900r/min
3.3 恒定負載下變轉速
仿真在次同步轉速(600r/min)下啟動,初始負載為一組三相平衡阻性負載,每相阻值為25?。2s時,原動機以300r/min/s的加速比開始加速,并在2.5s時達到自然同步轉速(750r/min),在3s時達到超同步轉速(900r/min),仿真結果如圖6所示。從圖6a可以看出,在轉速變化過程中,BDFIG發電系統始終保持恒頻恒壓輸出。結果表明,所提出的NPCC方法在整個速度范圍內對獨立BDFIG發電系統是有效的。從圖6b可以看出,在轉子轉速從次同步速度加速到超同步速度的過程中,CW電流實現了平滑換相,這符合BDFIG的工作原理。此外,從圖6c可以看出,實際的CW電流的d、q軸分量能一直很好地跟蹤其參考值。以上仿真結果驗證了所提方法具有良好的動態性能。

圖6 恒定負載下的變轉速仿真Fig.6 Simulation results under the constant load and variable rotor speed
3.4 變電機參數對比仿真
在實際應用中,如果BDFIG的溫度升高,電機繞組電阻將變大。另外,如果系統過載,便會發生磁飽和現象,繞組的自感和互感將會減小。而傳統的MPCC方法過度依賴電機參數,遇到類似情況時,會嚴重影響控制系統性能,甚至導致系統失控。由式(2)和式(3)可知,CW和PW的電感對預測電流的計算影響很大。為了驗證所提出的電流控制方法對電機參數變化的魯棒性,僅啟動電流環,在相同工況下分別對MPCC和NPCC兩種方法進行測試,以對比兩種方法的參數魯棒性。
仿真時選用的負載為每相阻值為25?的三相阻性負載,轉速為600r/min。在0.4s時,分別將CW和PW的自感和互感降低20%,兩種方法仿真結果分別如圖7和圖8所示。
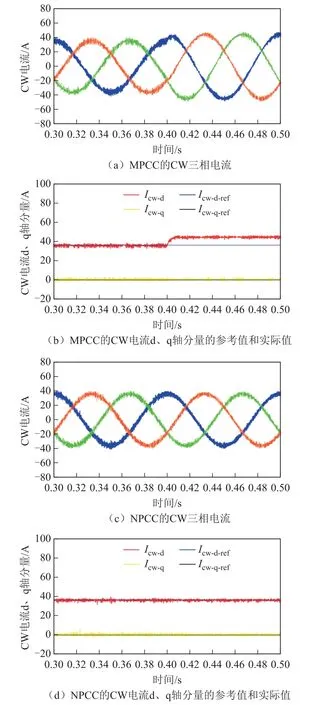
圖7 轉速為600r/min且CW自感和互感減小20%的仿真結果Fig.7 Simulation results under 80% CW self-inductance and mutual-inductance at the rotor speed of 600 r/min

圖8 轉速為600r/min且PW自感和互感減小20%的仿真結果Fig.8 Simulation results under 80% PW self-inductance and mutual-inductance at the rotor speed of 600 r/min
由圖7a和圖7b可以看出,當CW自感和互感減小時,用MPCC方法得到的CW電流d軸分量實際值不再跟蹤電流指令,最終產生了一定的穩態誤差。而圖7c和圖7d所示的NPCC方法在參數變化時仍能很好地跟蹤CW電流指令,幾乎不受CW電感變化的影響。由圖8a和圖8b可以看出,當PW的自感和互感減小時,采用MPCC方法的控制系統CW電流d軸分量在短暫大幅超調后,出現了較大的穩態誤差,CW電流的q軸分量在短暫變化后恢復為指令值。如圖8c、圖8d所示,在PW的電感變化時,采用NPCC方法的控制系統CW電流的d分量和q分量在小幅波動后均迅速趨于穩定,繼續很好地跟蹤指令值。
仿真結果表明,采用MPCC的BDFIG發電系統受電機參數的影響較大。當系統參數發生變化時,CW電流的d軸分量將出現穩態誤差,進而會導致發電電壓出現穩態誤差。在同樣工況下,NPCC方法可有效避免該問題,且NPCC的動態響應速度和電流跟蹤精度均優于MPCC。因此,本文提出的用于獨立BDFIG的改進NPCC方法能顯著提高系統對電機參數變化的魯棒性。
4 實驗驗證
本節對本文所提方法在一個5kV·A的BDFIG獨立發電實驗平臺中進行了恒轉速變負載、恒負載變轉速及變電機參數等工況下的實驗驗證。平臺實物圖如圖9所示,實驗中使用的BDFIG參數見表2。
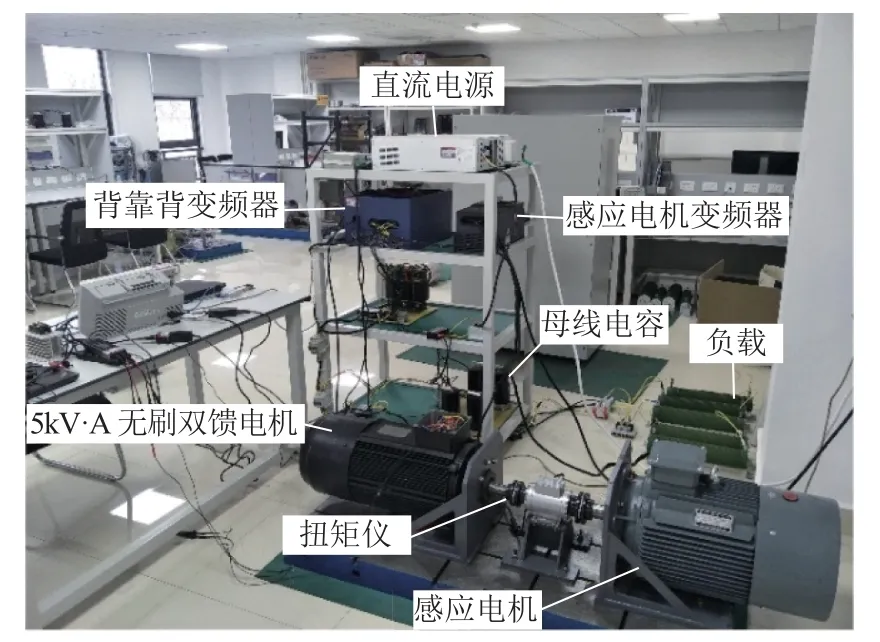
圖9 5kV·A無刷雙饋獨立發電平臺Fig.9 The 5kV·A standalone BDFIG experimental platform
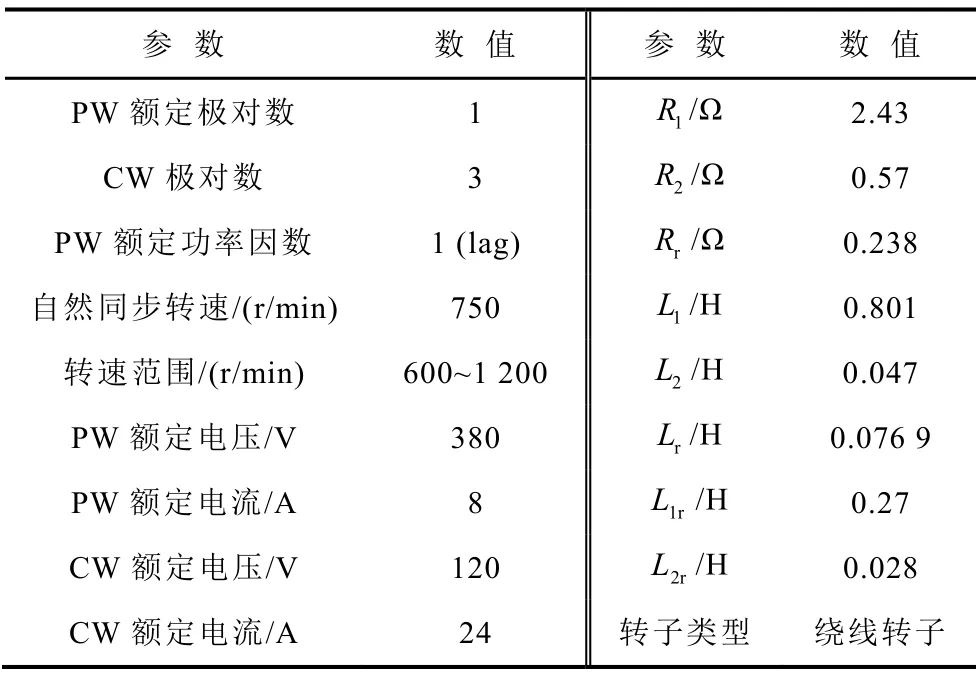
表2 實驗用BDFIG主要參數Tab.2 Main parameters of the BDFIG in the experiment
實驗程序中,關于式(19)中CW的d軸電壓獲取方法的問題,目前采用的方案是將通過NPCC算法計算得到的CW電壓dq軸分量參考值,存儲到寄存器中,同時送入逆Park變換模塊,然后通過SVPWM調制產生所需的CW電壓。NPCC算法是一種離散控制方法,它從8個電壓矢量從選出一個最優矢量。而采用SVPWM算法控制IGBT的開通和關斷,可準確輸出這8個電壓矢量中的任一電壓矢量,因此理論上CW電壓的參考值和實際值完全一致。由于逆變器死區以及IGBT管壓降的影響,獲得X2d和X2q計算公式分母中電壓值的最好方式是對CW電壓進行采樣、濾波和坐標變換。但由于硬件條件有限,目前僅在網側變流器中安裝了電壓傳感器用于并網鎖相,而機側變流器中無電壓傳感器。待后續硬件條件升級,在機側變流器加裝電壓傳感器后,將采用實際采樣值進行計算,計算精度較現有方案會有提升。
4.1 恒定轉速下變負載
實驗在次同步轉速(600r/min)下進行,初始負載為一組功率等級1kW的三相平衡阻性負載,每相阻值為160?。3.7s時在系統中再增加一組功率等級2kW的三相平衡阻性負載,阻值為80?,并在4.8s時將其卸載。實驗結果如圖10所示。從實驗結果可以看出,在采用NPCC算法的獨立發電系統恒轉速下運行時,當負載發生變化,系統可以維持穩定的發電頻率及幅值,同時CW電流快速跟蹤給定值。

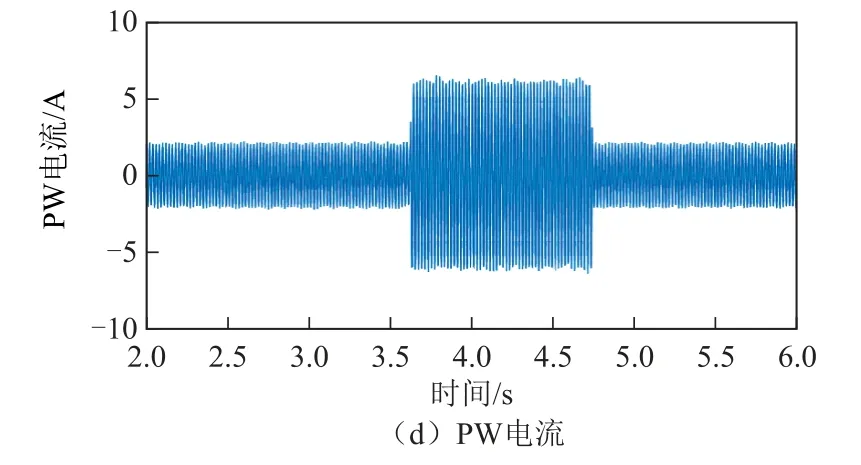
圖10 變負載實驗結果Fig.10 Experimental results under the variable load
4.2 恒定負載下變轉速
實驗在次同步轉速(600r/min)下啟動,初始負載為一組功率等級1kW的三相平衡阻性負載,阻值為160?。14s時,原動機以30r/min/s的加速比開始加速,并在19s時達到自然同步轉速(750r/min),在24s時達到超同步轉速(900r/min),實驗結果如圖11所示。從實驗結果可以看出,在轉速變化過程中,BDFIG發電系統始終保持恒頻恒壓輸出,同時CW電流實現了平滑換相。

圖11 變轉速實驗結果Fig.11 Experimental results under the variable speed
4.3 變電機參數對比實驗
由前文推導可知,CW和PW的電感對MPCC預測電流的計算影響較大,電機電阻變化對MPCC預測電流影響較小。因此,為了驗證所提出的方法對電機參數變化的魯棒性,本節將分別進行電阻、電感參數變化工況下的MPCC和NPCC對比實驗,對比檢驗兩種方法的參數魯棒性。變電機參數工況通過在電機端口串聯電阻、電感近似模擬電機參數變化以及過載導致勵磁電感變化來實現。為了驗證所提出的電流控制方法對電機參數變化的魯棒性,在相同工況下分別運行MPCC和NPCC兩種電流控制器,以對比它們的參數魯棒性。
首先進行變電機電阻參數的實驗,實驗時選用的負載為每相阻值為25?的三相阻性負載,轉速為600r/min。進行MPCC實驗時,在6.5s將電阻值為0.2?的電阻接入CW繞組與變頻器之間,并在8.5s時將其短路,實驗結果如圖12所示。NPCC實驗在10s時,將值為0.2?的電阻接入CW繞組與變頻器之間,并在11.5s時將其短路,實驗結果如圖13所示。實驗結果表明,當電阻參數發生變化時,以上兩種方法的CW電流的d軸分量不會發生突變,穩定的跟蹤參考值,不會產生穩態誤差,實驗結果與理論推導基本一致。

圖13 采用NPCC時CW電阻變化的實驗結果Fig.13 Experimental results under the CW resistance change with NPCC
然后,進行變電感實驗。所用的BDFIG的PW自感較大,由于實驗條件所限,難以找到與之相匹配的電感接入系統,因此僅進行CW自感變化的實驗研究。進行MPCC實驗時,在4.8s將20mH的電感接入CW繞組與變頻器之間,并在8.1s時將其短路切除,實驗結果如圖14所示。進行NPCC實驗時,在3.8s將20mH的電感接入CW繞組與變頻器之間,并在6.5s時將其短路切除,實驗結果如圖15所示。實驗時選用的負載為每相阻值為25?的三相阻性負載,電機運行轉速為600r/min。實驗結果表明,采用MPCC時,當電感參數發生變化,CW電流的d軸分量將出現穩態誤差,進而導致發電電壓出現穩態誤差。在同樣工況下,NPCC方法可有效避免該問題。
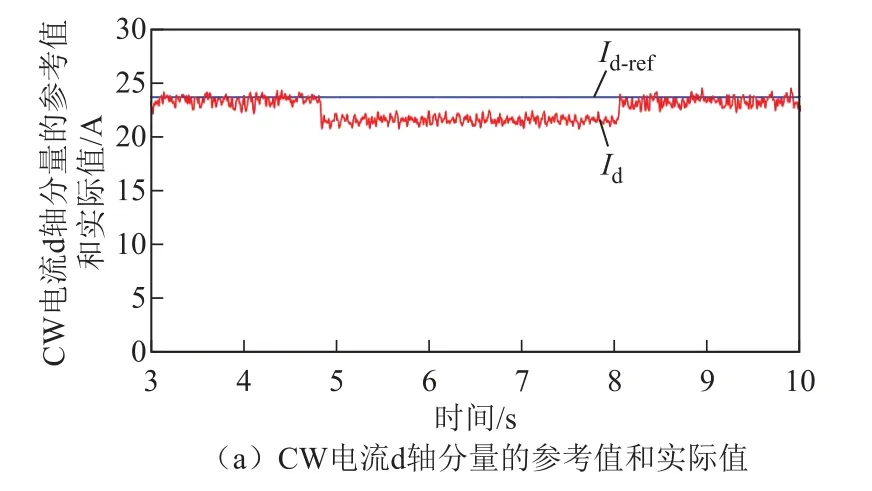

圖14 采用MPCC時CW自感變化的實驗結果Fig.14 Experimental results under the CW self-induction change with MPCC
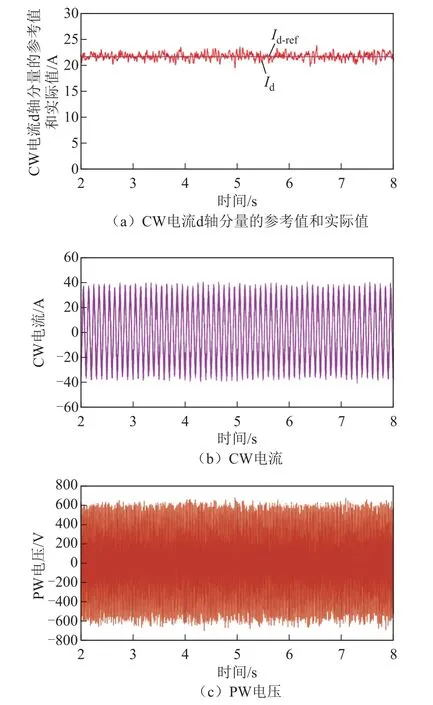
圖15 采用NPCC時CW自感變化的實驗結果Fig.15 Experimental results under the CW self-induction change with NPCC
以上變電機電感參數的實驗是在電機外部電路串聯或短接電感,模擬增大或減小電機自感。而實際應用中,電機電感變化主要是由于電機負載增大,電機電磁飽和導致勵磁電感減小。因此為了更準確地模擬實際工況,本小節還將進行過載工況下的MPCC與NPCC參數魯棒性實驗。實驗工況為:采用PW電壓閉環控制,維持PW線電壓有效值為70V,初始負載為一組每相阻值25Ω的三相阻性負載,PW電流約為1.6A。后期并入一組每相阻值4Ω的三相阻性負載,此時PW電流為11.6A,約為PW電流額定值的1.5倍。根據電機的設計方案,此時電機進入飽和狀態。進行MPCC實驗時,電機在6.5s進入飽和狀態,在9s退出飽和。進行NPCC實驗時,電機在4.6s進入飽和狀態,在6.8s退出飽和,具體實驗結果如圖16和圖17所示。從圖16a和圖17a可以看出,在增加大負載后,為了維持發電電壓恒定,CW電流d軸參考值將大幅增大,MPCC方法的CW電流d軸實際值并未完全跟蹤參考值,產生了穩態誤差,而NPCC方法的電流跟蹤性能良好,沒有受到參數變化帶來的影響,與仿真結果相符。

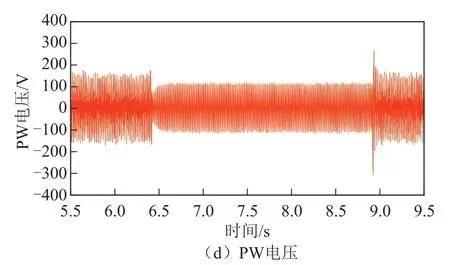
圖16 采用MPCC時電機過載的實驗結果Fig.16 Experimental results under overload with MPCC
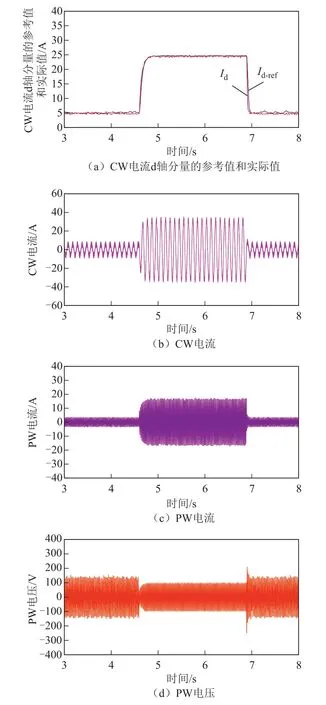
圖17 采用NPCC時電機過載的實驗結果Fig.17 Experimental results under overload with NPCC
綜合以上實驗結果,本文提出的獨立BDFIG系統的改進NPCC方法不僅在各種工況下動態性能良好,同時又能顯著提高系統對電機參數變化的魯棒性。
5 結論
本文提出了一種適用于獨立BDFIG系統的改進NPCC方法,給出了詳細推導過程與具體實現步驟,并用所提出的方法代替了傳統的基于PI控制器的CW電流環對獨立BDFIG發電系統進行控制。最后對該方法進行了仿真及實驗驗證。從仿真和實驗結果可以看出,在各種典型工況下,CW電流均能快速準確地跟蹤參考值,具有快速的動態響應性能,從而保持發電電壓幅值和頻率穩定。此外,在CW和PW電感變化時,所提出的NPCC方法幾乎不受電機參數變化的影響,其參數魯棒性高于傳統的模型預測電流控制方法。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
兒童故事畫報(2019年5期)2019-05-26 14:26:14
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56