康護智能小車設計
2021-10-25 02:13:36陶筱云劉潤揚張煒瑋胡宇航
科技信息·學術版 2021年19期
關鍵詞:機械臂
陶筱云 劉潤揚 張煒瑋 胡宇航
摘要:近年來,智能家居逐漸走入大眾家庭,但針對老年人居家護理的智能家居仍出于市場空缺狀態。人步入老年,面對病痛、記憶力與體力的衰退,生活質量均有所下降。針對老年人的這些問題,就需要一個能定時定點為其提供一些生活用品的智能家居,本設計針對解決老人居家養老護理問題進行討論,基于STM32單片機,結合OPENMV、機械臂等硬件設計康護智能小車。設計能實現智能小車在指令下尋找固定目標并到達指定地點,為用戶提供指定用品的功能,具備智能家居產品特點,在居家養老領域有重要意義。
關鍵詞:STM32;智能小車;機械臂
0 引言
隨著我國老年人人口基數不斷增大,我國逐漸邁入人口老齡化社會。面對老年人記憶力和體力等不斷下降的問題,老年人日常護理成為年輕人心頭之患。且近年來隨著科技發展,智能家居逐漸被普及,但針對老年人日常護理需求的智能產品遲遲沒有出現。針對老人腿腳不便且記憶力較差的情況,希望能夠有智能產品能夠按時定點為老人提供日常生活中所需要的物品。
康護智能小車利用OPENMV結合AprilTag,可以實現智能小車尋找固定目標的需求,即達到了“定點”的要求。通過OPENMV自帶的視覺算法,加上AprilTag的3D定位原理且每一個AprilTag庫中的圖像均具有獨立標識,與二維碼相似,但更為簡單,提高識別的實時性,可在OPENMV內置的STM32單片機中得到所在的方向、3D位置和標識,通過串口通信將數據傳到小車主控STM32單片機上,在STM32中完成識別得到的標識與指令中的標識相匹配,通過3D位置的條件判斷是否成立,傳輸相應指令到STC89C52RC單片機上,驅動相應電機轉動。利用機械臂的抓取動作結合Apriltag識別,實現了提供指定物品的功能。結合避障、語音識別等功能加以程序編寫,實現智能小車在一般家庭戶型中自動匹配指令中的對應,并前往所在處,即可完成智能小車前往固定目標的需求。設計的重點是智能小車尋找到固定地點并提供指定物品。
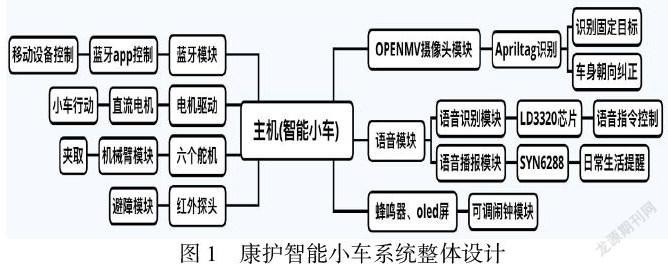
1 系統整體設計
智能小車主體利用STM32F103RC主控,結合三輪小車電機驅動,電源模塊,OPENMV視覺算法攝像頭模塊和apriltag3D定位算法,通過串口通信,與OPENMV自帶的STM32F427VG通信獲取AprilTag的相關信息,經計算判斷過后,與STC89C52RC單片機通信,控制電機轉動圈數和轉動方向控制智能小車的前進、后退、轉向以及行進距離。本文主要討論的是OPENMV與AprilTag結合得到所需數據對于智能小車尋找固定目標的方法。系統整體結構圖如圖1所示。
2功能模塊設計
2.1 OPENMV攝像頭模塊
本設計所采用的OPENMV攝像頭模塊基于STM32F427VG ARM Cortex M4 處理器,搭載OV7725 感光元件和一個2.8mm焦距鏡頭,可以處理640×480 8-bit 灰度圖或者320×240 16-bit RGB565 彩色圖像。利用MicroPython語言進行編程,并且內置MicroPython和OPENMV Cam特定的函數庫,還可以添加第三方函數庫,可以實現感光元件、機器視覺、神經網絡等特定功能,可讀性較高,且編譯過程簡單。能夠實現幀差分算法、顏色追蹤、標記跟蹤、人臉檢測等功能。
OPENMV對于AprilTag的識別十分迅速,且精確度較高,標識識別準確率高,因此通過在不同物體或地點上設置不同的APRILTAG,就可以實現智能小車準確前往指令內的目標,即實現固定目標的尋找。
其控制芯片STM32F427VG基于ARM Cortex M4 處理器,模塊整體工作電壓在3.3V-5.0V。有一異步串口總線,可用于與其他單片機通信。并且含有一μSD卡槽,可用于程序的存儲,便于OPENMV脫機使用,也可以存儲攝像頭傳回的圖像、視頻等。
2.2 主控芯片與輔助芯片
STM32F103RC是32位ARM微控制器,基于ARM 32位的Cortex-M3內核,工作電壓在2.0V-3.6V,工作溫度在-40℃-85℃,同時含有睡眠、停機和待機模式,降低功耗和成本。共有三個異步通信串口,保證數據接收和發送分別進行,提高容錯率。串口一接收OPENMV傳來數據,串口二接收語音識別或APP傳來的指令數據,并把二者進行匹配;串口三發送小車行進指令到STC89C52RC單片機,STC89C52RC單片機接收指令后,控制電機做出相應動作。
STC89C52RC單片機是基于51內核的8位CMOS單片機,具有低功耗的優點,工作電壓在2.0V-3.3V,工作溫度在0℃-75℃,含有一個異步通信串口,可供其與STM32F103RC主控芯片通信。
2.3 小車基本功能模塊
電機驅動主要是通過L298N驅動模塊,可同時控制兩個二相直流電機,即兩個電機分別同時控制左右轉向輪,在判斷條件成立后分別執行前進、后退、轉向等功能。利用I/O口可直接提供控制信號,模塊輸出電壓最高可達50V。模塊所需工作電壓位4.5V-46V,工作溫度為-25°C-130°C。具有啟動性能好,啟動轉矩大的優點。
避障模塊主要利用小車前方的兩個紅外傳感器,對小車前方物體進行避障,檢測到極限距離內存在紅外反射時,小車優先執行避障程序。兩個紅外傳感器,能做到小車前方180°范圍內是否存在障礙,加上軟件設計部分保證小車朝向始終為正向,即可保證小車能正常行進。
2.4 機械臂模塊
在小車上加裝機械臂,大大的提升養老的實用性,在攝像頭模塊和Apriltag識別的輔助下,機械臂可以拾取地面上的雜物或通過編程進行實現定時定點為老人夾取所需藥品或生活用品,防止老人被雜物絆倒或者滑倒,也減少了老人自己拿取藥物出現錯誤的的可能性。本設計利用六個TBS2701舵機,實現機械臂在前后左右及斜向六度自由運動,靈活性更高,能夠實現的操作也更多。結合金屬機身與抓夾,延長機械臂的使用壽命,同時也能保證動作精度更高。具備以下特點:
(1)承載能力足——能夠抓取一定重量的物體以及小車機身在運動時機械臂的轉動慣性。
(2)剛度高——用于適應外界環境的變化,比如過熱或者過冷的天氣。
(3)導向性能好——設置導向裝置或者定位輔助裝置。
(4)重量輕——減少小車運動狀態下的負荷以及提升其靈活性,在不改變功能的前提下減輕機械臂重量。
2.5藍牙模塊
通過藍牙ATK-HC50模塊與STM32單片機相連,結合APP inventor,進行圖像化APP開發。在APP內編程可實現藍牙連接、地點指令轉換相應數字代碼、預設時間等功能,即可使現實中使用的模擬信號轉換為程序內使用的數字信號,使程序更不容易出錯,指令更加精準,簡化了單片機之間串口通信的難度。通過藍牙連接到手機,再通過我們自主開發的APP可以實現手機遠程控制小車,在不方便發聲或語言有障礙的情況下,依然可以操控智能小車。
2.6 鬧鐘模塊
本設計采用4×4矩陣式鍵盤與52單片機結合實現鬧鐘功能。通過鬧鐘功能+語音播報系統可以實現提醒老人按時吃飯喝水以及吃藥等日常行為,保證了老人的日常規律作息,在一定程度上使老人的身體更加健康。鬧鐘主要由時、分,以及鬧鐘狀態組成,鬧鐘的對外接口主要由鬧鐘初始化,檢測鬧鐘,設置鬧鐘,關閉鬧鐘等操作組成。
設計利用52單片機與OLED屏,結合矩陣鍵盤,實現用戶自主調時;也可以通過藍牙模塊與手機APP相連,實現家人進行預設或老年人無需移動自由操控,減低老年人的操作壓力,提升用戶的使用體驗。
3 結論
設計基于STM32單片機,利用OPENMV攝像頭模塊,結合AprilTag,設計了康護智能小車的尋找固定目標的功能。經過兩種方案多次利用實物重復對比實驗,將AprilTag置于天花板處時,小車在尋找固定目標時,更加精確,且受到誤差影響較小,并結合高優先級的小車中斷避障方案,可保證小車在較簡單的家庭戶型中為使用者提供基本的日常生活輔助。結合語音識別功能和藍牙app模塊,小車能夠在指令下到達目標id碼處,簡化操作,提高使用體驗。進一步可改進小車行進中避障功能的優先級,調整小車的避障方法,讓小車能夠在更復雜的家庭布局中正常行進。
利用六度機械臂可以實現抓夾的動作,結合攝像頭模塊、Apriltag識別和編程,可以完成在預制時間下,為用戶夾取指定物品,到達指定地點的功能。
參考文獻
[1]何浩楠,陳宇濤,蔣占陽,陳健,施一劍.基于AprilTag的智能小車拓展定位追蹤應用[J].現代信息科技,2020,4(16):24-27+30.
[2]鄭才國,江劍.基于STM32單片機智能小車設計[J].工業控制計算機,2021,34(09):143-144+146.
[3]劉忠超,范靈燕,翟天嵩,趙志遠.基于STM32體感交互式仿上肢采摘機械臂設計[J].中國農機化學報,2021,42(09):164-169.
基金項目:國家級大學生創新創業訓練計劃項目“康護智能小車”(項目號:202110066005)
猜你喜歡
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
