基于ADAMS的某攜行具動態仿真分析
2021-10-26 13:15:18周君濤何永蔣瀟蓉郁家耀薛濱
機械制造與自動化 2021年5期
周君濤,何永,蔣瀟蓉,郁家耀,薛濱
(南京理工大學 機械工程學院,江蘇 南京 210094)
0 引言
在戰場上,士兵的主要目標是生存和作戰,而負重能力的大小是決定士兵能否順利實現這一目標的重要因素之一。士兵通常需要在負重的前提下,完成各種高難度的動作。
在進行一個時間較長、強度較高的行走時,士兵往往需要承載較大載荷。根據調查研究發現,士兵在負重20kg的前提下,行軍20min后,吸氧量增加了33%,此時士兵的體能開始逐漸下降。當負重比較大時,執行某些高難度的軍事任務會對士兵的身體造成傷害,降低軍隊作戰能力。KNAPIK J J等[1]發現士兵在負重作業時,小腿及腳踝處易受傷,因此會降低移動能力和操作武器能力,削弱部隊的作戰能力,增加戰斗傷亡的風險[2]。JENNINGS B M等[3]在調查研究中發現,在持續作戰情況下,有80%的士兵由于負重過大,從而導致骨骼肌損傷,甚至無法正常行走。
為解決上述問題,本文設計了一款多功能攜行裝置,主要通過輪轂電機驅動,使用減震彈簧來實現攜行具的穩定行駛,達到減輕人體負重的效果,并針對單兵攜行裝置運載炮彈行駛過程中的動力響應問題進行了建模分析研究。
1 攜行裝置的結構設計
單兵攜行裝置主要有兩種設計方案:第一種是通過人機工程學方法對攜行方式進行改進與創新,使得負載在人體上的受力分布更加合理,王義斌等[4]設計了用于實現負荷行走功能的下肢助力機械外骨骼;第二種是通過開發附加攜帶裝置,用于攜帶重型的負載。附加攜帶裝置具有獨立行進結構,可以為士兵承擔負荷。本文基于第二種方案進行結構設計。
如圖1所示,攜行具與人體之間有個牽引機構,用腰帶6連接。當士兵勻速向前行進時,輪轂電機2帶動車輪1向前運動,在電機的作用下,減少了牽引力。在平坦路面行駛時,士兵只需提供牽引方向;在翻越障礙時,需要提供翻轉力矩。極大程度上節省了士兵的體能。同時在腰部與攜行具之間設計一個阻尼-減震裝置7,以減少碰撞時產生的接觸力,起到保護人體的作用。承力板4與車輪之間安裝了兩個彈簧3,起到減震作用。控制器5用來控制電動機的啟動、調速以及暫停。
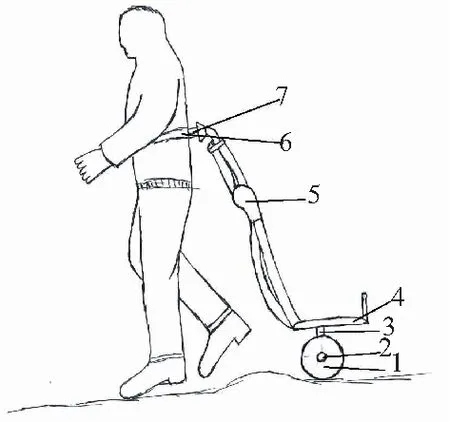
1—車輪;2—輪轂電機;3—彈簧裝置;4—承力板;5—控制器;6—腰帶;7—阻尼減震裝置。
2 攜行裝置的建模
2.1 基本假設
攜行裝置的運動是負載、架體、車輪、腰帶之間相互耦>合作用的過程,當輪轂電機驅動行進時,腰帶與人體腰部之間產生碰撞力,對腰帶產生力矩。在分析攜行裝置系統受力以及運動的基礎上,考慮到負載、架體以及車輪的材料和結構參數的影響,基于以下假設建立攜行裝置耦合物理模型:
1) 整個攜行具裝置系統近似為一個多剛體系統;
2) 當攜行裝置行進時,將腰帶彈性變形部分簡化成剛性介質,并沿水平方向運動;
3) 將地面與障礙物設置為砂土狀態,當橡膠輪胎與其進行接觸時,裝置軸線方向上受平衡力,裝置沒有磨損、行進過程中沒有發生形變。
在此基本假設下,進行三維實體建模,通過在炮彈、車體以及腰帶各部件之間添加各種約束、運動副以及接觸關系,從而創建攜行裝置數字樣機。
2.2 攜行裝置實體建模
多剛體動力學的核心在于建模與求解問題。ADAMS中使用的是歐拉-拉格朗日方法,其采用的是第一類Lagrange方程建立系統的動力學方程,在ADAMS/View中對機械系統的分析一般包含3個步驟[5]:1)建立機械系統的實體模型;2)定義系統內部的約束及拓撲關系;3)動力學模型求解及結果后處理。本文先使用三維建模軟件SolidWorks建立攜行裝置以及炮彈的模型,將三維模型導入ADAMS軟件中,在ADAMS中對其施加各部件之間的約束以及接觸關系。
2.3 各部件約束以及接觸關系施加
在攜行裝置各個部位定義以下的約束。
轉動副:車輪與車軸之間使用軸承連接,輪轂電機帶動車輪繞車軸勻速向前運動,在此處定義一個轉動副,并通過轉動副對車輪轉速進行定義;連接桿的上端與腰帶的右端定義一個轉動副,使其能夠上下轉動,如圖2所示。

圖2 轉動副
移動副:當士兵向前拉著裝置行進時,對人體與地面定義一個移動副。如圖3所示。

圖3 移動副
固定副:繪制的砂土以及障礙模塊分別固定在地面上;承力框、鉸支座、連接桿與控制器等各零件之間采用焊接使其固定。
彈簧副:如圖4(a)中所示,在承力框下方左右兩端放置彈簧副來代替三維軟件中攜行裝置的彈簧;如圖4(b)中所示,在腰帶與連接處放置一個彈簧副,以此減小裝置運行中產生的碰撞力,從而起到保護人體的作用。
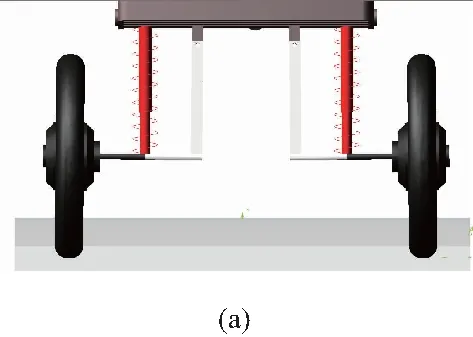
圖4 彈簧副
接觸:輪轂電機帶動車輪向前行駛時,與地面之間存在摩擦力;運動過程中,承載物與承力板之間存在摩擦力。
定義全局坐標系的方向,其中水平方向與攜行具的行進方向相反,垂直方向與重力方向相反。繪制地面與障礙部分,并設置相應的參數,設車體前進方向為前。在對各部件定義約束和接觸的基礎上,對整個模型施加重力,并結合動態計算,完成對攜行裝置多剛體動力學模型的建立,如圖5所示。

圖5 單兵攜行裝置多剛體動力學模型
2.4 碰撞力模型
攜行裝置仿真模型由多個部件構成,在ADAMS中進行動力學仿真時,除了添加必要的運動副,還需要定義各個部件之間的接觸約束,從而模擬炮彈與攜行裝置之間的動態響應。接觸碰撞模型將碰撞過程歸結為“自由運動-接觸變形”,它通過計入碰撞體接觸表面的彈性和阻尼,建立了描述碰撞過程中力和接觸變形之間的本構關系[6]。在ADAMS中采用非線性等效彈簧-阻尼法來模擬接觸過程,該模型在數學上便于處理[7]。法向接觸力F可表示為
(1)
式中:k為Hertz接觸剛度;e為≥1的指數;g為接觸點法向穿透距離;c為阻尼因子。
切向接觸力Ft采用庫侖摩擦定律,可表示為
Ft=μ(|Vt|)sign(Vt)F
(2)
式中:Vt為切向速度;μ為摩擦系數。
3 攜行具動態性能仿真結果與分析
本文根據行進過程中翻越障礙的高度不同,對腰部受力和承載物的動態響應進行仿真計算,分析攜行具以及承載物的通過性,受力曲線如圖6-圖7所示。
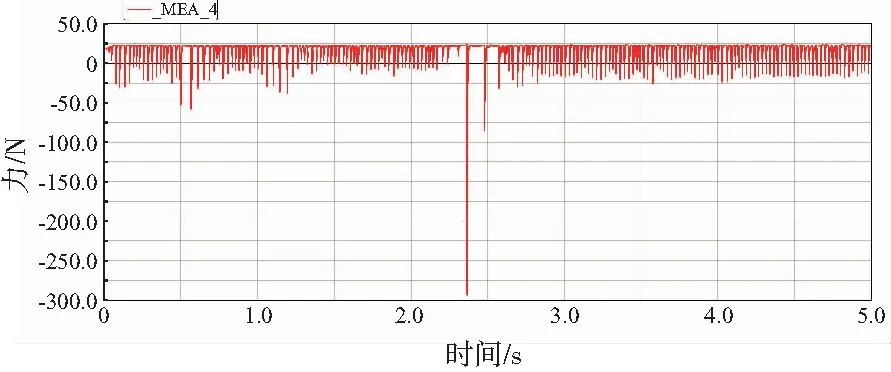
圖6 翻越20mm障礙時腰部受力曲線圖

圖7 翻越30mm障礙時腰部受力曲線圖
3.1 臺階高度對腰部受力分析
由上述受力曲線圖6-圖7可知,當裝置翻越20mm障礙時,腰帶部位受力最大為293.9N,受力時間為2.37s;當裝置翻越30mm障礙時腰帶部位受力最大為421.2N,受力時間為2.76s。由此可以得出結論:在一定范圍內,攜行具翻越的障礙高度對人體影響不大。我國汽車側面碰撞的乘員保護法規GB 20071-2006規定,腹部受力峰值應該≤2.5kN,所以本文仿真結果符合標準。
3.2 攜行裝置的承載物速度與加速度分析
由受力曲線圖8-圖9可知,當裝置翻越20mm障礙時,承載物質心垂向最大速度為1351.67mm/s,垂向最大加速度為7.6×105mm/s2,承載物質心水平最大速度為1477.87mm/s,水平最大加速度為1.26×105mm/s2;由圖10-圖11可知,當裝置翻越30mm障礙時,承載物質心垂向最大速度為1201.46mm/s,垂向最大加速度為2.2×106mm/s2,承載物質心水平最大速度為1653.44mm/s,水平最大加速度為1.76×106mm/s2。由此可以得出結論:障礙物的高度對承載物的質心垂向速度影響較小。

圖8 翻越20mm障礙時承載物 質心點水平、垂向速度
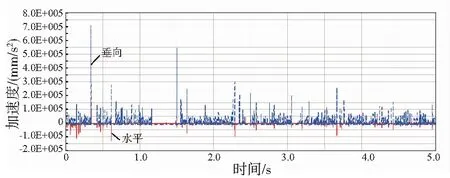
圖9 翻越20mm障礙時承載物 質心點水平、垂向加速度
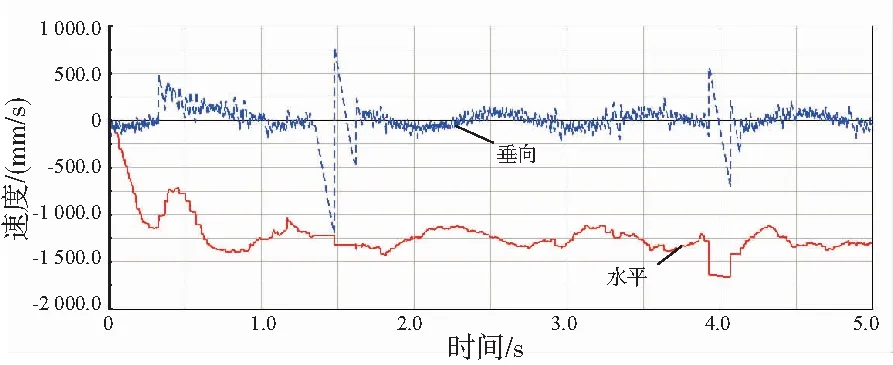
圖10 翻越30mm障礙時承載物 質心點水平、垂向速度

圖11 翻越30mm障礙時承載物 質心點水平、垂向加速度
4 結語
本文運用ADAMS動力學仿真平臺對某行具進行仿真分析得出以下結論,在無需人力強硬拉扯裝置,以一個恒定的速度步行并翻越障礙物時:
1)本文設計的單兵攜行裝置,通過性良好;
2)在士兵牽引攜行裝置翻越障礙時,其高度對人體作用影響較小;
3)在翻越障礙時,障礙的高度對其承載物的動態響應影響較小;在實際過程中,當翻越障礙時,應該減緩速度,平穩越障,以避免承載物掉落。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
海峽姐妹(2020年9期)2021-01-04 01:35:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
山東青年(2016年1期)2016-02-28 14:25:25
核科學與工程(2015年4期)2015-09-26 11:59:03
當代修辭學(2014年3期)2014-01-21 02:30:44
公務員文萃(2013年5期)2013-03-11 16:08:37