基于二自由度PID前饋解耦的恒溫恒濕控制系統設計
2021-10-26 13:15:26邱巧迪徐世許張鸚琦王鵬程王偉
機械制造與自動化 2021年5期
關鍵詞:設計
邱巧迪,徐世許,張鸚琦,王鵬程,王偉
(1. 青島大學 自動化學院,山東 青島 266071; 2. OMRON公司,山東 青島 266032)
0 引言
隨著科研技術的不斷發展,對溫濕度性能指標的控制提出了更高的要求。在進行生物、醫藥、化學等科研實驗時需要溫濕度恒定,溫濕度的控制精度直接決定實驗的成敗[1]。但目前國內市場大部分的國產環境實驗箱都只對溫度或相對濕度單參數控制,無法滿足實際實驗需求[2]。部分進口實驗箱雖然實現了溫濕度聯合控制,但是價格昂貴,后期也存在維護困難等缺點。
針對恒溫恒濕箱的市場現狀,開發了基于二自由度PID前饋解耦控制的恒溫恒濕控制系統[3]。通過解耦技術和二自由度PID算法的運用,減小了溫度和相對濕度的互相擾動,提高了控制精度[4],保證實驗箱可以長時間穩定運行,同時通過引入物聯網模塊和觸摸屏,既簡化工作人員的操作流程,又可以在服務器端遠程監管實驗箱,提高了設備智能化水平。
1 硬件設計
系統硬件包括NX控制器、溫控模塊、除濕模塊、加濕模塊、溫濕度傳感器等。NX控制器通過Ethernet/IP與OMRON NA觸摸屏通信,通過溫濕度傳感器采集信號,各傳感器信號以模擬量形式被采集到NX控制器中,并對傳感器信息進行分析,使用RS-485串口通信調節溫控驅動板、除濕驅動板和無線發射器的工作狀態,組成了整個系統的硬件結構。在NX控制器中,利用Sysmac Studio編程軟件編寫程序,實現了溫濕度信號采集、數據轉換、溫濕度控制量計算等功能。系統的硬件結構如圖1所示。

圖1 控制系統硬件結構
2 階躍響應實驗建模
在實際控制中,溫濕度存在耦合情況,若不對溫度和相對濕度兩個回路進行解耦,兩個回路之間互相干擾,會對控制效果產生極大的負面影響,嚴重時會導致溫濕度振蕩從而破壞系統的正常工作。在恒溫恒濕試驗箱系統的運行過程中,箱體內風機、LED燈等電子元件散熱以及箱體縫隙處的內外空氣交換也會對溫濕度造成干擾[5],但是經過實驗驗證這些因素對溫濕度的擾動極弱,因此可以忽略這些因素對溫濕度的擾動,只考慮溫濕度之間的耦合關系,將溫濕度控制系統近似為雙輸入雙輸出系統[6],其控制原理如圖2所示。
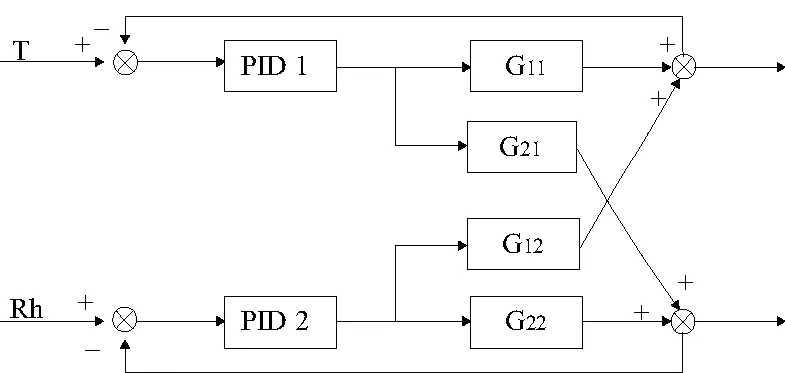
圖2 恒溫恒濕箱控制原理
考慮到溫濕度耦合的復雜機理,采用階躍響應實驗建立被控系統的數學模型。文獻[7]提出在溫濕度變化過程中具有大時滯和大慣性等特性,因此對其進行了數學解析和建模[8],得到了一階傳遞函數如式(1)所示。
(1)
式中:K為被控系統的放大系數;T為慣性時間常數;τ為時滯時間;s為拉普拉斯變換后新的空間中的變量。
采用Sysmac Studio軟件中的數據跟蹤功能實時跟蹤溫濕度變化數據,并使用Matlab繪制階躍響應曲線,重復多次測試并解出合適的數學模型[9]。
設置濕度控制階躍響應實驗,在箱體內部溫濕度穩定的情況下,調節濕度PWM控制字,實現調節電壓占空比從而調節加濕進水量,溫度回路則不加以控制,循環持續地進行加濕動作。濕度控制過程中溫度對象的數學模型如式(2)所示。
G12(s)=0
(2)
G12環節的產生是由于該系統采用的蒸汽加濕和冷凝除濕法調節濕度。
階躍響應曲線無量綱化,即令
(3)
解得
(4)
式(4)中僅有T和τ兩個參數,t為表示時間的變量,在濕度實驗響應曲線中取兩個不同時刻點代入式(4)中,通過計算得出T22與τ22。因此濕度控制過程相對濕度被控環節如式(5)所示。
(5)
G22環節為濕度控制環節。
以同樣的方式進行溫度控制階躍響應實驗,在溫濕度穩定和系統開環的情況下,調節溫控 PWM 控制字,調節電壓信號,改變半導體制冷片運行功率,使用 Matlab 處理得出階躍響應曲線,通過計算得到溫度控制過程被控環節:
(6)
(7)
G21環節的產生則是由于溫度的改變直接影響相對濕度,G11環節為溫度控制環節。
3 解耦環節設計
常見的解耦環節設計方法有前饋補償解耦設計、對角陣解耦設計和單位陣解耦設計等。該系統采用前饋補償解耦設計方法,解耦環節的加入,使系統在解耦的基礎上通過設計簡單的控制器就可以達到極高的控制品質。溫度、濕度的前饋補償解耦原理如圖3所示。

圖3 前饋補償解耦系統
圖中GB21和GB12為前饋解耦環節,要實現溫度和相對濕度回路的解耦,需要應用不變性原理如下:
U1(s)G21(s)+U1(s)GB21(s)G22(s)=0
(8)
U2(s)G12(s)+U2(s)GB12(s)G11(s)=0
(9)
解上式得出前饋補償環節:
(10)
(11)
在前饋補償環節計算過程中,GB21(s)滯后時間65s與GBB22(s)滯后時間55s相差不大,近似處理成二者相等,解得:
(12)
GB12(s)=0
(13)
GB12(s)為溫度前饋補償環節,GB21(s)為濕度前饋補償環節。
4 二自由度PID控制器設計
根據本文恒溫恒濕箱控制系統的功能需求,對PID控制器進行設計(圖4),要求溫濕度既可以滿足優良的設定值跟蹤性能,又要具有干擾抑制的定值控制性能,而傳統的PID控制器無法做到二者兼備,傳統PID控制器傳遞函數如式(14)所示。
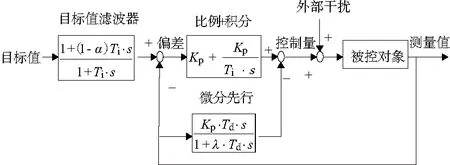
圖4 帶設定值濾波器的二自由度PID
(14)
式中:Kp表示比例系數;Ti表示積分時間常數;Td表示微分時間常數。
由圖4可知二自由度PID算法在結構上等價于在微分先行PID算法的基礎上引入帶可調參數α的濾波環節。微分先行PID算法只對輸出測量值進行微分作用,消除了設定值改變時微分元素引起的輸出跳變,即微分沖擊,保證了控制器運行的穩定性。而比例先行PID算法則是使比例環節只對測量值起作用,從而消除比例沖擊的影響。二自由度PID算法則是將微分先行PID算法與比例先行PID算法的特性糅合在一起,當參數α、λ在0~1之間任意取值時得到介于微分先行PID算法和比例先行PID算法的調節效果。
5 仿真與實現
5.1 Simulink仿真
為了驗證二自由度PID控制器和前饋補償解耦控制設計對溫度和相對濕度的控制效果,使用Matlab中的Simulink搭建了溫濕度解耦控制系統模型,控制器環節分別對二自由度PID算法和常規PID算法進行仿真,并對比其控制效果。
基于上述得到的溫濕度被控回路、前饋補償環節的傳遞函數,將溫度目標值設定為20℃,相對濕度目標值設定為45%,利用Simulink組態的二自由度PID控制的仿真模型如圖5所示,二自由度PID控制器仿真如圖6所示。

圖5 溫濕度控制系統二自由度 PID解耦控制仿真

圖6 二自由度PID控制器仿真
完成模型搭建工作后需要對模型中的PID參數進行整定。首先常規PID控制器采用經驗法進行手動參數整定,并得出較為合理的PID參數如下:
Kp1=0.5;Ki1=0.000 73;Kd1=400
(15)
Kp2=0.5;Ki2=0.000 90;Kd2=200
(16)
其次通過引入二自由度參數對比得出二自由度PID控制器的控制優勢。二自由度PID解耦控制中的PID參數與常規PID控制參數相同,二自由度參數如式(17)和式(18)所示。
α1=0.65;λ1=0.1
(17)
α2=0.65;λ2=0.1
(18)
將參數代入仿真程序中,運行得到常規PID解耦控制和二自由度PID解耦控制的溫度控制過程曲線如圖7所示,相對濕度控制過程曲線如圖8所示。

圖7 溫度控制過程曲線

圖8 相對濕度控制過程曲線
在仿真驗證二自由度PID控制器使用時,通過調節PID參數,首先使外部干擾響應性能達到最優,然后利用目標值濾波器對設定的參數值進行處理,使該算法目標值響應性能也達到最優,進而實現二自由度最佳控制。而傳統的 PID 控制器無法做到二者兼備,即如果重視目標值跟蹤性能整定 PID 參數,則會對外部擾動的響應速度變慢;如果強調外部干擾響應性能調節 PID 參數,又會產生過沖的現象。通過分析圖7和圖8,得到控制系統動態性能指標見表1。通過對比可以看出,采用二自由度PID解耦設計的溫濕度控制系統的動態性能指標得到了顯著提升,并且溫濕度的調節時間、穩態誤差完全滿足系統設計需求。針對本文所描述的恒溫恒濕箱被控系統的設計需求,要求溫濕度既可以滿足優良的設定值跟蹤性能,又要具有干擾抑制的定值控制性能,該系統完全符合設計需求。

表1 常規PID解耦控制和二自由度PID解耦控制性能指標
5.2 系統實現
系統軟件實現了登錄、溫濕度趨勢查看、溫濕度參數設置、光照設置、狀態監控等功能,可實時對系統進行控制。恒溫恒濕箱控制系統經調試完成后投入實際使用,醫療平臺要求溫度范圍在 5℃~90℃時的穩態控制精度達到±0.1℃,相對濕度范圍10%~80%時的控制精度達到±1%,由云醫療平臺網站上截取實際溫濕度控制效果如圖9所示。
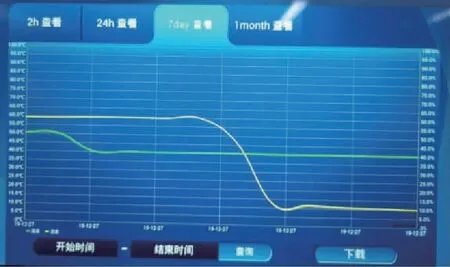
圖9 二自由度PID解耦控制系統實際運行效果
恒溫恒濕箱在初始50℃的條件下變更溫度設定值為40℃,在1h內快速響應達到設定值,調節過程超調量1.3℃,穩態誤差為0,并且在后續的濕度調節過程中保證溫度恒定無抖動。箱體濕度保持在60%穩定運行,未受溫度調節干擾,將濕度設定為10%,系統在3h內達到極限控制濕度,超調量小,穩態誤差為0.2%,保證了試驗箱的穩定運行。
6 結語
本文設計了一種基于二自由度PID前饋解耦恒溫恒濕控制系統,實現了對恒溫恒濕箱的溫度和相對濕度的精確控制,具有穩定性好、效率高、操作簡單等優點,并利用Sysmac Studio對NX控制器進行編程。現場運行效果表明,該控制系統極大地提高了工人操作效率和控制品質,且恒溫恒濕箱工作穩定可靠。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04