一種三自由度車載無人機升降調平裝置研究
2021-10-26 13:15:30張延芝
機械制造與自動化 2021年5期
張延芝
(江蘇無線電廠有限公司,江蘇 南京 210022)
0 引言
無人機可完成情報偵察、中繼通信、電子對抗、防空、制空、精確打擊等多種任務,其通常搭載于各種車輛的運動平臺上執行飛行任務。在2014年2月新德里汽車展上,雷諾發布的一款KWID概念車提出了車載無人機的應用,其車頂配備了四旋翼無人機。2017年路虎推出一款SUV車交付奧地利紅十字會,其車頂搭載一架小型四旋翼無人機,用于緊急情況下的搜尋和救援任務[1]。
隨著汽車科技和無人機技術的發展,車載無人機作為空地互補一體化作戰模式,打造了交互融合的作戰新體系,有效提升了系統協同作戰能力。在車載無人機系統模式下,戰車搖身一變成為小型“陸地航母”,無人機在車輛運動平臺上的成功起降及隨行儲運,成為車載無人機系統性能的重要技術指標之一。但車載無人機起降的水平度一般≤10°,在車輛可通過的大坡度山地、越野地等地形中,較難安全可靠地起降無人機。
一般車載無人機系統集成常見的是小型車輛配置較小起飛載荷、非系留式小型無人機。為滿足在大型越野車上集成整機起飛質量≥70kg的多旋翼系留無人機的使用需求,研究并設計了一種基于三自由度的車載無人機升降調平裝置,可用于大型越野車重載無人機系統集成中,在車輛任意方位大角度傾斜靜止或運動中,可進行無人機起降平臺的大行程升降與全向調平,保障了無人機的儲運與起降。
三自由度平臺廣泛應用于科研實驗室高精度運動平臺搭建、姿態控制、運動模擬與仿真等,以及艦船與汽車模擬器、3D/4D娛樂平臺、VR娛樂座椅等方面[2]。在升降調平裝置的設計中引用三自由度平臺的運動機理[3],對其常規應用逆向擴展,將其中的上下、俯仰、橫滾等3個自由度運動組合使用,使底座傾斜時,控制平臺恒定水平調平,從而可集成應用于車載無人機系統的升降調平裝置中[4]。
1 總體結構方案
升降調平裝置總體結構主要由三自由度調平平臺和絲桿滑塊升降機構組成,其總體結構方案見圖1。

圖1 總體結構方案
三自由度調平平臺又為車載無人機的起降平臺,其主要由3組折返式伺服電動缸、頂部單軸鉸鏈和底部雙軸虎克鉸以及頂部平臺組成,安裝基座共用升降平臺。三自由度調平平臺具有俯仰、橫滾和微行程升降運動等3個自由度,通過聯動控制3個伺服電動缸,調節平臺水平方向360°的姿態,其全向調平傾斜角度可達22°,使車輛在任意方位40%坡度內的山地、越野地等地形上,也能調平無人機起降平臺[5]。
絲桿滑塊升降機構作為三自由度調平平臺穩固可靠的升降基座,其主要由兩組絲桿滑塊升降組件、一套驅動傳動組件和升降平臺組成。通過單輸入雙輸出減速機驅動兩側梯形絲桿滑塊升降組件,進行升降平臺的垂向運動。其能在任意位置停滯并滯留自鎖升降平臺,且易于增配模塊化手動裝置,用于應急手動升降。同時,解決了在三自由度調平平臺[6]的結構尺寸及穩定性要求的限制下,垂直升降行程較小的問題。
升降調平裝置的三維結構設計見圖2。
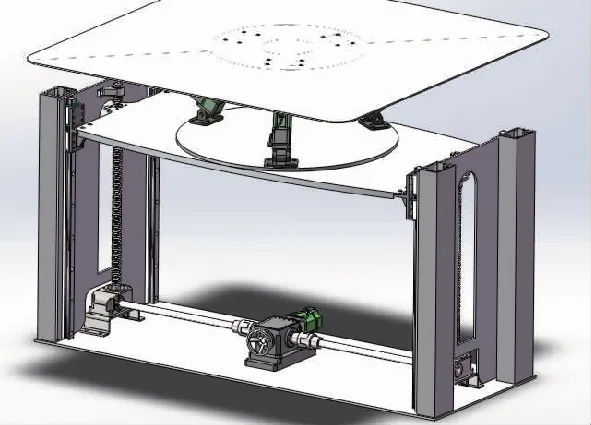
圖2 三維結構設計
升降調平裝置結構方案的主要性能指標及技術參數見表1。
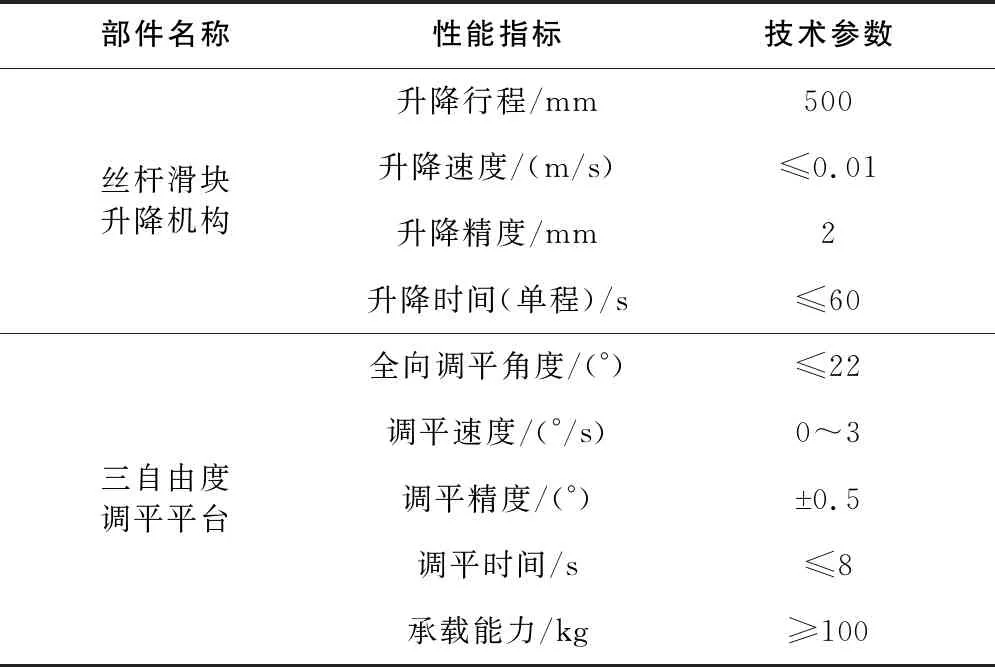
表1 運動性能指標
2 電氣系統原理
升降調平裝置電氣系統主要由全向調平控制單元、升降運動控制單元、檢測組件和運動控制模塊等組成,其電氣系統原理見圖3。

圖3 電氣系統原理
全向調平控制單元根據傾角傳感器采集調平平臺當前水平方向x軸、y軸的傾角值,通過解算后控制3個伺服電動缸的位移量,使調平平臺處于水平狀態。對傾角傳感器的傾角采集頻率與電動缸的運動響應頻率進行耦合匹配,實現平臺的實時動態調平。
升降運動控制單元根據位移傳感器采集的當前升降平臺高度位置信息,按上位機任務指令控制驅動傳動組件的伺服電機,完成升降平臺的上升、下降或置零動作。
檢測組件作為升降平臺的極限位置電氣限位,當位移傳感器出現故障時,上、下兩個限位開關控制升降平臺停止。
運動控制模塊作為升降調平裝置的主控制器,具有三自由度調平平臺姿態控制、升降平臺位置控制、工作流程控制、數據采集與處理、CAN通信、任務處理與故障報警等功能。
3 控制系統架構
控制系統主要由檢測組件和運動控制模塊兩部分組成,其控制系統架構見圖4。
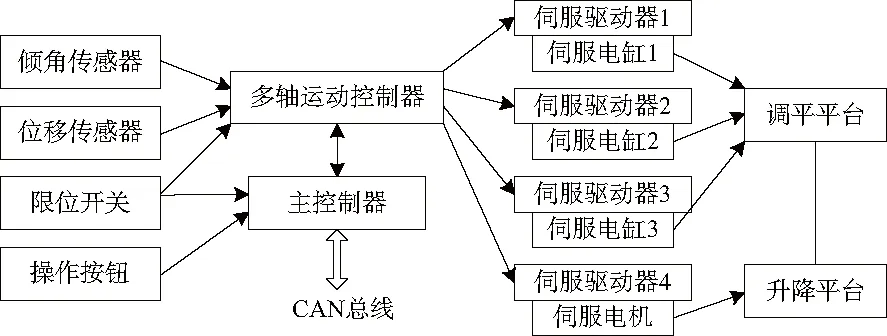
圖4 控制系統架構
檢測組件由測量調平平臺姿態角的傾角傳感器、測量升降平臺位置的位移傳感器及限位開關等組成。傾角檢測采用三軸加速度計和MEMS陀螺儀組合的動態傾角測量傳感器[7],可實時測量水平雙軸x、y方向的傾角,以閉環動態控制平臺至恒定水平姿態。位移傳感器采用拉繩式絕對值編碼器,控制升降平臺的上下位置,具備斷電位置記憶,可手動和電動自由切換使用功能。限位開關由上下兩個接近開關組成,用于上、下極限位置電氣安全保護。
運動控制模塊由STM32系列主控制器、多軸運動控制器、伺服電機及其驅動器、嵌入式操作系統、嵌入式運動平臺控制軟件和CTM8251系列CAN通信模塊等組成。
4 軟件系統設計
控制軟件采用嵌入式系統軟件,包含硬件初始化程序、操作系統板級支持程序、升降調平控制軟件應用程序、底層驅動程序及外圍擴展模塊,具備二次開發功能,并能夠配合整車無人機起降與儲運系統集成。
控制軟件主要完成的功能包括BIT自檢、狀態機模型、任務控制、動作控制、運動控制、數據采集與狀態監控、CAN通信控制、故障報警等多個任務,并按任務優先級進行實時調度控制。
平臺控制策略流程見圖5,其中BIT自檢可對本系統硬件和軟件的功能和性能進行自動檢測,并在發現故障時自動隔離故障并發出預警信息。任務控制是通過時序和邏輯控制方式完成一整套完整的動作流程,如能一鍵調平上升至最高點,一鍵復位并下降至最低點。動作控制用于規劃三自由度調平平臺和升降平臺的運動軌跡和控制目標。運動控制則根據三自由度調平平臺的逆運動學模型[8],針對目標承載平臺的期望位姿,反解出多個伺服電動缸的期望位置和速度,并通過多軸運動控制器完成多個伺服電動缸的實時協同控制。狀態監控用于采集調平平臺的實時姿態以及升降平臺的實時位置,并記錄調平與升降的次數。通信控制用于通過CAN總線接口提供調平組件角度信息、升降組件高度信息、狀態信息、故障信息等[9]。
軟件系統的狀態機[10]模型見圖6,用于平臺上電并初始化后,對當前任意時刻、任意位姿的調平平臺狀態進行轉移與處理。因運動平臺在運行過程中存在多種狀態,包括:上電狀態、底位狀態、中位狀態、調平狀態、急停狀態等,利用狀態機模型分析,對調平平臺狀態進行模塊化管理,可更好地完成調平平臺運動控制及安全操作。
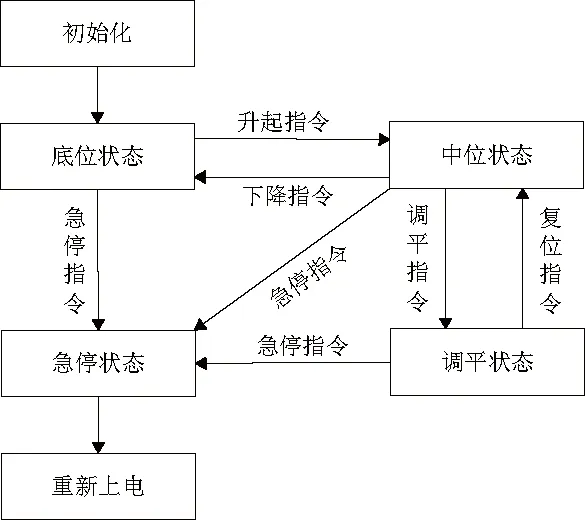
圖6 狀態機模型
5 結語
本文研究并設計的三自由度升降調平平臺可用作車載無人機的升降調平裝置,可在車輛任意方位22°傾斜角內,靜態或動態升降、調平平臺,保障車載無人機任意時態的安全起降。同時拓展了三自由度運動平臺的應用場合,也為實現車載無人機的起降提供了結構方案與系統原理基礎。