下肢外骨骼機器人的剛度調控與仿真分析
2021-10-31 01:42:06陳勇馬文彬吳維
大連交通大學學報 2021年5期
陳勇,馬文彬,吳維
(大連交通大學 機械工程學院,遼寧 大連 116028)*
我國人口的老齡化越來越嚴峻,截止到2020年5月,65周歲及以上的老年人占全國總人口10.83%[1]. 腦瘁中、帕金森、阿爾茲海默癥是老年人的常見病和多發病,每年新發病的患者約為200萬,80%的患者會引起下肢偏癱,導致下肢肌肉薄弱,無法提供足夠的力量完成行走,不同程度喪失了運動能力,偏癱較輕的老年人可以依靠輪椅進行運動,偏癱嚴重的老年人需要常年臥床,經常引起褥瘡、肌肉萎縮、靜脈血栓、泌尿系統感染、骨質疏松等并發癥,在身心方面長年忍受著常人體會不到的痛苦,給家庭和社會帶來巨大的負擔[2-4].
下肢外骨骼機器人穿戴在老年人的腿上,充當老年人穿戴者的外骨骼,幫助老年人重新站立和行走,促進血液循環,防止肌肉萎縮,減少并發癥的發生,能夠恢復老年人的運動能力和生活能力,重新回歸社會[5-7].
目前的下肢外骨骼機器人雖然多種多樣[8-10],但是很少考慮剛度變化和姿態調整,穿戴者與下肢外骨骼機器人的運動協同性較差[11],引起嚴重的位姿誤差,限制穿戴者的運動靈活性,增加穿戴者的行走疲勞[12],制約下肢外骨骼機器人的應用[13].
氣動肌肉具有高功率密度、輕質柔順等特點,近年來很多科研機構逐漸開始將氣動肌肉作為下肢外骨骼機器人的驅動方式,開展相關研究. Beyl等人采用氣動肌肉對下肢外骨骼機器人進行力矩控制,穿戴者以0.7 m/s速度行走時,下肢外骨骼機器人可以實現小于2 N·m的跟隨力矩[14]. Galle等人對氣動肌肉的下肢外骨骼機器人進行研究,對穿戴者進行4 min的踝關節助力測試,助力時刻為49%±1%的步態周期,對穿戴者每側肢體提供(0.11±0.2) W/kg的助力,可使穿戴者的代謝消耗降低12%[15]. Malcolm等人對氣動肌肉下肢外骨骼機器人的助力效果進行分析,單側穿戴時助力(0.136±0.008) W/kg,雙側穿戴時助力(0.133 ±0.006) W/kg,穿戴者的代謝消耗分別降低了7%和15%[16]. 浙江大學李超等人研究了氣動肌肉驅動的全身型外骨骼機器人,采用PID控制算法,在幅值30°、周期8 s的正弦信號下,髖關節和膝關節的跟蹤誤差為±3°[17]. 浙江大學周心慰等人研究基于氣動肌肉為驅動元件的下肢康復外骨骼機器人,搭建控制系統軟硬件平臺,完成下肢單關節的被動康復訓練和下肢組合康復訓練[18]. 浙江大學陶俊等人采用氣動肌肉驅動下肢外骨骼機器人,利用關節角位移信號和足底壓力信號獲取穿戴者下肢運動信息,提出基于步態相位檢測的人機協同運動控制方案,實現下肢外骨骼機器人與穿戴者在步行運動上的協同[19]. 氣動肌肉的尺寸、大小和功耗是下肢外骨骼機器人驅動系統的關鍵性問題,如果選擇較大尺寸的氣動肌肉來滿足穿戴者所需的關節力矩,就會影響下肢外骨骼機器人的便捷性和機動性,如何選擇合適的氣動肌肉與驅動方式,以及如何設計氣動肌肉的布局是提升下肢外骨骼機器人靈活性能和助力效率亟待解決的難題[20].
為了解決現有技術存在的上述問題,本文根據人體下肢的剛度特性,利用仿生學原理,設計一種下肢外骨骼機器人,能夠改變剛度,調整下肢外骨骼機器人與穿戴者的人機耦合姿態.
1 人體下肢的剛度特性
1.1 測試對象
采用隨機抽樣法確定測試對象,按照年齡和性別進行分組,測試對象的基本情況如表1所示,數據用均值±標準差表示.
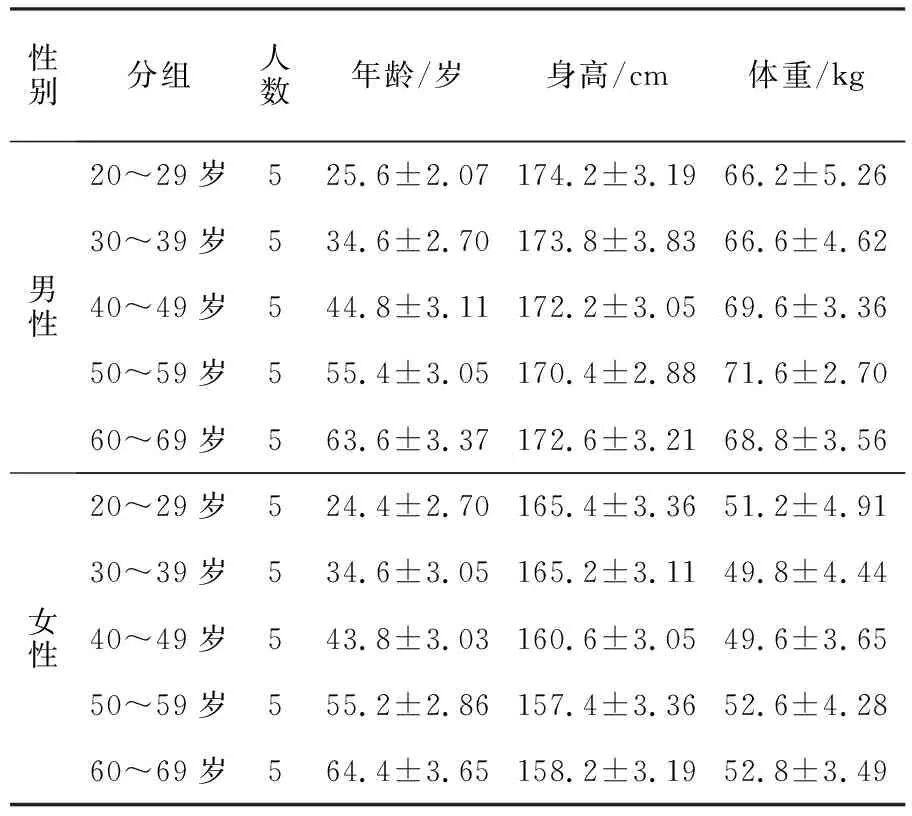
表1 測試對象的基本情況
所有測試對象身體健康,沒有做過各類下肢的手術,均無肌肉、骨骼、神經的疾病,不影響正常的行走姿態. 在測試開始前,向每位測試對象解釋本次測試的步驟、目的和注意事項,采用自愿的形式,征得測試對象簽字同意.
1.2 測試方法
利用Motion Analysis三維動作捕捉分析系統,實時記錄測試對象在平地行走的步態數據,采樣頻率為300 Hz/s. 實驗前,對Motion Analysis三維動作捕捉分析系統進行校正,確保動作捕捉的準確性,提高精度,降低誤差. 調整鏡頭的空間位置和拍攝范圍,保證完整記錄測試對象每次行走的5個步態周期.
每個測試對象重復行走5次,每次行走之間讓測試對象休息5 min,消除疲勞和自適應對步態參數的影響. 根據視頻信息排除行走過程中的異常步態,同時去掉每組步態數據的頭尾數據,避免測試對象在起步和停止時對數據分析的影響,保留的每組數據至少包括3個完整的步態周期.
1.3 測試結果
采用Morin剛度模型[3],計算人體運動的下肢剛度K:
(1)
(2)
(3)
(4)
式中,Fmax是地面最大垂直作用力,ΔL是人體腿部最大壓縮量,tc是人體下肢單步支撐時間,tf是人體下肢單步騰空時間,m是人體下肢質量,L是人體下肢長度,v是人體下肢運動速度,Δyc是人體質心最大垂直位移.
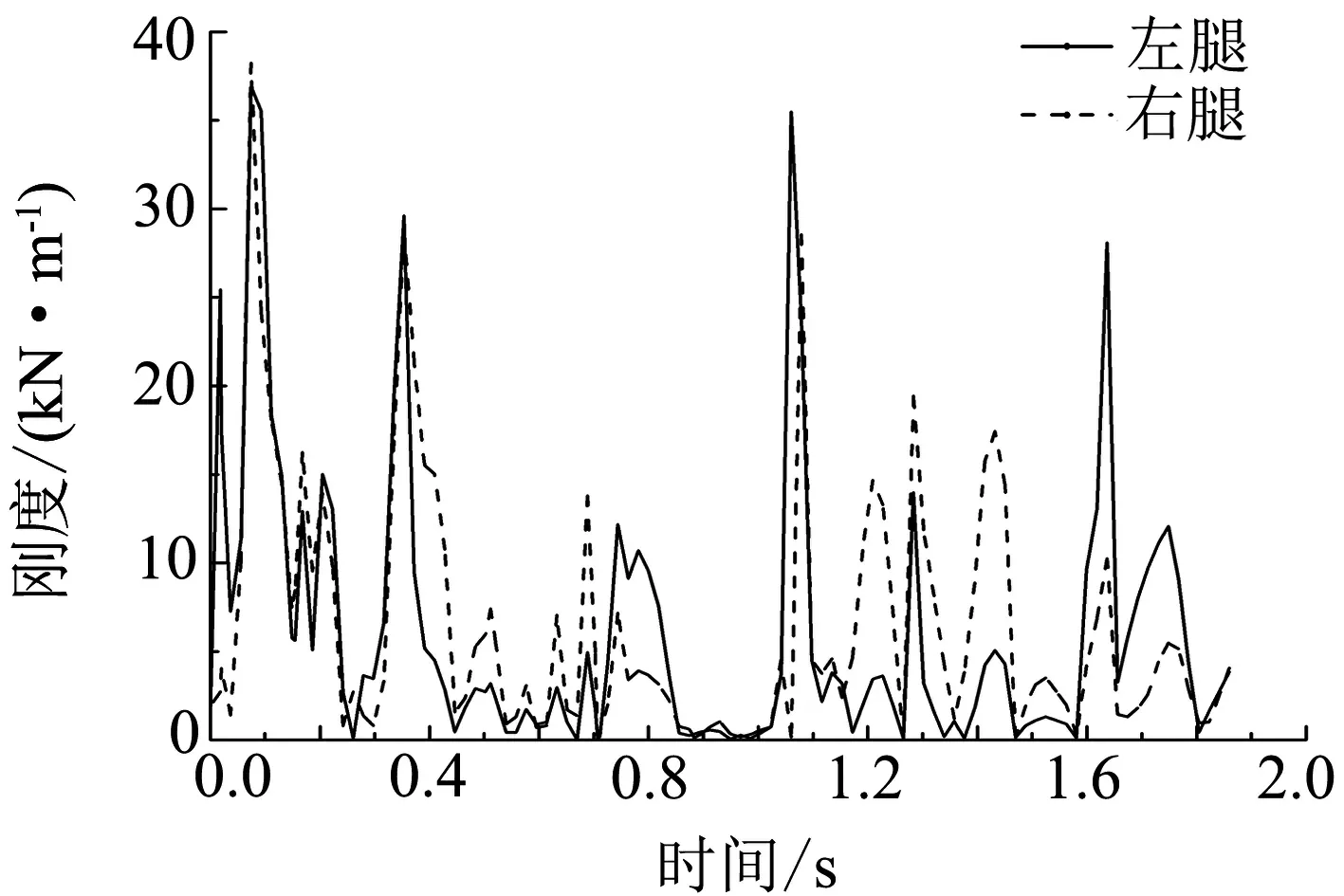
利用Motion Analysis三維動作捕捉分析系統,實時記錄測試對象以不同速度在平地行走的運動視頻,提取人體下肢剛度方程(1)~(4)的參數值,獲得測試對象的下肢剛度如圖1所示.

圖1 測試對象平地行走的下肢剛度曲線
測試對象以不同速度在平地行走的下肢均值剛度如表2所示,為下肢外骨骼機器人的剛度調控提供仿生設計數據.
2 下肢外骨骼機器人的剛度調控
根據人體下肢的剛度特性,利用仿生學原理,設計一種下肢外骨骼機器人,能夠改變剛度,調整下肢外骨骼機器人與穿戴者的人機耦合姿態.
調節下肢外骨骼機器人后腰和側腰的長度,可以滿足不同胖瘦的穿戴者,調節下肢外骨骼機器人大腿和小腿的長度,可以滿足不同身高的穿戴者,保證下肢外骨骼機器人的關節軸與穿戴者的關節軸重合,提高穿戴者的舒適性和實用性. 下肢外骨骼機器人的結構參數如表3所示,關節活動范圍如表4所示.
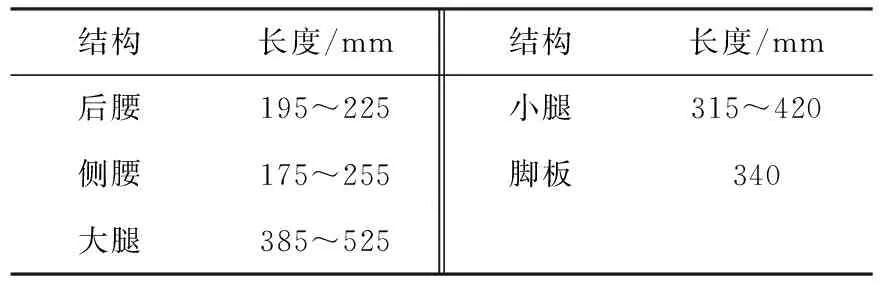
表3 下肢外骨骼機器人的結構參數
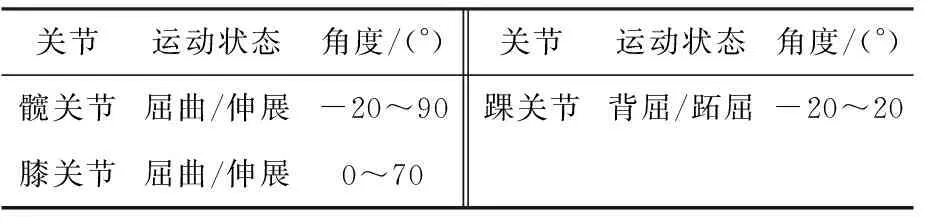
表4 下肢外骨骼機器人的關節活動范圍
采用拮抗式氣動肌腱驅動關節運動,調控下肢外骨骼機器人的剛度,不斷變換下肢外骨骼機器人腿部與地面的接觸狀態和相互作用,讓下肢外骨骼機器人保持合適的剛度,產生柔順化的運動效果,緩沖和吸收地面的沖擊力,適應環境的變化,保持運動姿態的穩定性,增強穿戴者的舒適性,提高穿戴者的運動靈活性. 氣動肌腱采用德國FESTO公司的DMSP型氣動肌腱,性能參數如表5所示.

表5 氣動肌腱的性能參數
下肢外骨骼機器人左右腿的髖關節和膝關節安裝美國ADI公司的S16477型慣性傳感器,實時采集轉角信號,經過信號調理和數模轉換,進行動作生成與運動反解,獲取穿戴者左右腿髖關節和膝關節的角速度與加速度,解算出穿戴者腿部的三維位姿,自適應調控拮抗式氣動肌腱的剛度,提供穿戴者所需的髖關節力矩和膝關節力矩,幫助穿戴者行走,實現下肢外骨骼機器人與穿戴者的動作一體化,突破剛體結構對于穿戴者的運動限制,提高步態穩定性和環境適應性.
3 下肢外骨骼機器人的仿真分析
利用三維建模軟件Catia建立穿戴者與下肢外骨骼機器人的三維模型,如圖2所示.

圖2 穿戴者與下肢外骨骼機器人的三維模型
根據下肢外骨骼機器人的運動特性,設置各個構件的物理特性和約束關系,添加驅動元件,設置驅動函數完成仿真運動.
下肢外骨骼機器人的約束關系(見表6),設置動態仿真的邊界條件.
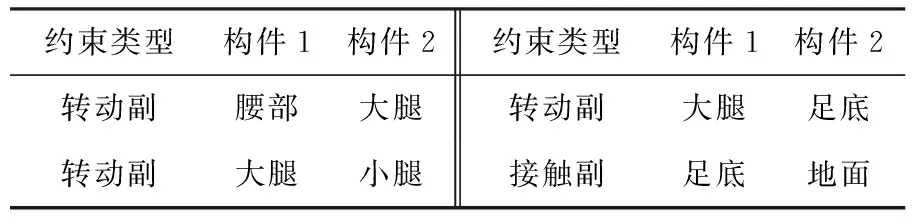
表6 下肢外骨骼機器人的約束關系
在運動副添加驅動元件,設置相應的驅動函數:
下肢外骨骼機器人左腿髖關節的驅動函數STEP(time, 0, 0, 0.55, -42d)+STEP(time, 0.55, 0, 0.9, 42d)+STEP(time, 0.9, 0, 1, -5d);
下肢外骨骼機器人左腿膝關節的驅動函數STEP(time, 0, 0, 0.15, -16d)+STEP(time, 0.15, 0, 0.4, 15d)+STEP(time, 0.4, 0, 0.75, -55d)+STEP(time, 0.75, 0, 1, 56d);
下肢外骨骼機器人右腿髖關節的驅動函數STEP(time, 0, 0, 0.3, 39d)+STEP(time, 0.4, 0, 0.9, -42d)+STEP(time, 0.9, 0, 1, 3d);
下肢外骨骼機器人右腿膝關節的驅動函數STEP(time, 0, 0, 0.15, -30d)+STEP(time, 0.15, 0, 0.4, 15d)+STEP(time, 0.4, 0, 0.75, -55d)+STEP(time, 0.75, 0, 1, 60d).
穿戴者為男性,身高1.75 m,體重75 kg,下肢外骨骼機器人的總體質量10 kg,調節下肢外骨骼機器人后腰、側腰、大腿和小腿的長度,保證下肢外骨骼機器人髖關節、膝關節和踝關節的旋轉軸與穿戴者相應的關節軸重合.
以運動速度0.8 m/s為例,仿真時間1.86 s,步數100,進行動態仿真,獲得下肢外骨骼機器人的剛度曲線,如圖3所示.
(a) 大腿的剛度曲線
(b) 小腿的剛度曲線圖3 下肢外骨骼機器人的剛度曲線
穿戴者與下肢外骨骼機器人以運動速度0.8 m/s在平地行走的過程中,下肢外骨骼機器人左側大腿剛度的最大值36.91 kN/m,最小值0.02 kN/m,均值剛度12.53 kN/m;下肢外骨骼機器人左側小腿剛度的最大值12.56 kN/m,最小值0.01 kN/m,均值剛度4.14 kN/m;相對于測試對象的下肢均值剛度5.69 kN/m,下肢外骨骼機器人左側大腿均值剛度增大6.84 kN/m,為穿戴者提供穩定支撐,下肢外骨骼機器人左側小腿均值剛度減小1.55 kN/m,產生柔順化的運動效果,緩沖和吸收地面的沖擊力;下肢外骨骼機器人右側大腿剛度的最大值38.25 kN/m,最小值0.09 kN/m,均值剛度12.72 kN/m;右側小腿剛度的最大值10.39 kN/m,最小值0.01 kN/m,均值剛度4.43 kN/m;相對于測試對象的下肢均值剛度5.69 kN/m,下肢外骨骼機器人右側大腿均值剛度增大7.03 kN/m,為穿戴者提供穩定支撐,下肢外骨骼機器人右側小腿均值剛度減小1.26 kN/m,產生柔順化的運動效果,緩沖和吸收地面的沖擊力. 下肢外骨骼機器人的剛度調控范圍滿足穿戴者下肢的剛度變化范圍,能夠提高穿戴者的運動靈活性.
4 結論
本文設計的下肢外骨骼機器人優勢在于,滿足穿戴運動要求的同時,能夠根據外界環境和運動方式自適應調節剛度,具有較好的靈活性.
(1)采用Motion Analysis三維動作捕捉分析系統,記錄人體以不同速度在平地行走的運動視頻,獲得人體下肢的剛度特性,為下肢外骨骼機器人的剛度調控提供仿生設計數據;
(2)利用三維建模軟件Catia建立穿戴者與下肢外骨骼機器人的三維模型,進行動態仿真分析,研究結果表明,穿戴者與下肢外骨骼機器人以運動速度0.8 m/s在平地行走的過程中,下肢外骨骼機器人左側大腿均值剛度增大6.84 kN/m,下肢外骨骼機器人右側大腿均值剛度增大7.03 kN/m,為穿戴者提供穩定支撐;下肢外骨骼機器人左側小腿均值剛度減小1.55 kN/m,下肢外骨骼機器人右側小腿均值剛度減小1.26 kN/m,產生柔順化的運動效果,緩沖和吸收地面的沖擊力;下肢外骨骼機器人的剛度調控范圍滿足穿戴者下肢的剛度變化范圍,能夠提高穿戴者的運動靈活性,具有廣闊的應用前景.
