基于UWB技術(shù)的室內(nèi)定位系統(tǒng)及其算法研究
2021-10-31 03:27:16胡丹妮李建峰趙洪森
麗水學(xué)院學(xué)報(bào) 2021年5期
關(guān)鍵詞:設(shè)計(jì)
胡丹妮,張 潔,李建峰,趙洪森,王 野
(麗水學(xué)院工學(xué)院,浙江麗水323000)
0 引言
超寬帶(Ultra Wide Band,UWB)技術(shù)是一種無載波通信技術(shù),利用納秒級的非正弦波窄脈沖傳輸數(shù)據(jù),與傳統(tǒng)的室內(nèi)定位技術(shù)相比,超寬帶技術(shù)具有功耗低、安全性高、抗多徑效果好等優(yōu)點(diǎn)。這些優(yōu)點(diǎn)能夠使它在室內(nèi)定位上有很好的應(yīng)用前景。人們對于室內(nèi)定位的需求日益增加,例如:在煤礦等突發(fā)災(zāi)難中,通過室內(nèi)定位,引導(dǎo)救援人員以最快速度解救被困人員;2020年的疫情防控中,基于UWB定位技術(shù)的定位手環(huán)、定位標(biāo)簽,防止人員跨部門接觸,做到人員的精確跟蹤定位;在軍事上,通過人員定位和設(shè)備追蹤進(jìn)行城市作戰(zhàn)訓(xùn)練、彈藥倉庫管理和高級研發(fā)等[1-3]。因此,實(shí)現(xiàn)低成本且高精度的室內(nèi)定位,具有非常重要的現(xiàn)實(shí)意義。
為此,我們將UWB技術(shù)、三邊定位算法、飛行時(shí)間測距(Time of Flight,ToF)等技術(shù)結(jié)合為一體,以高精度室內(nèi)定位需求為出發(fā)點(diǎn),設(shè)計(jì)了基于基站/標(biāo)簽一體化的超寬帶室內(nèi)定位硬件系統(tǒng)和上位機(jī)驗(yàn)證平臺。
1 理論分析與計(jì)算
1.1 UWB的主要特點(diǎn)
UWB具有以下特點(diǎn)[4]:(1)系統(tǒng)容量大;(2)數(shù)據(jù)傳輸速度快;(3)抗干擾能力強(qiáng);(4)多徑分辨能力強(qiáng);(5)隱蔽性好;(6)定位精確;(7)功耗低。
1.2 定位方案選擇
與傳統(tǒng)定位方法不同,UWB定位技術(shù)并不是基于信號強(qiáng)度(Received Signal Strength Indicator,RSSI)的方法來獲取位置信息,而是運(yùn)用一定算法通過精確無線信號的發(fā)送和接收時(shí)刻來獲取位置信息。UWB室內(nèi)定位系統(tǒng)實(shí)現(xiàn)精確定位的前提是要獲取與位置相關(guān)的信息和參數(shù),建立相關(guān)的數(shù)學(xué)模型,根據(jù)這些信息和參數(shù)以及數(shù)學(xué)模型來解算電子標(biāo)簽的坐標(biāo)。UWB定位技術(shù)應(yīng)用最廣泛的測距方式是飛行時(shí)間測距法(Time of Flight,ToF)以及到達(dá)時(shí)間差測距法(Time Difference of Arrival,TDOA)[5]。從定位方式來看都屬于多點(diǎn)定位方式,即通過確定電子標(biāo)簽與多個已知基站的相對位置關(guān)系來實(shí)現(xiàn)定位。
一般情況下,定位一個電子標(biāo)簽需要知曉一些固定的已知位置的基站。根據(jù)數(shù)學(xué)理論知識,需要至少3個基站才能夠?qū)崿F(xiàn)二維電子標(biāo)簽定位,而最少4個非共面基站才能實(shí)現(xiàn)三維定位電子標(biāo)簽定位。
1.3 ToF測距
系統(tǒng)定位采用ToF(Time of Flight)算法計(jì)算定位標(biāo)簽與基站之間的距離。算法計(jì)算框如圖1所示。ToF算法采用Two-way Ranging通信的形式計(jì)算UWB標(biāo)簽與基站間的距離[6-8]。
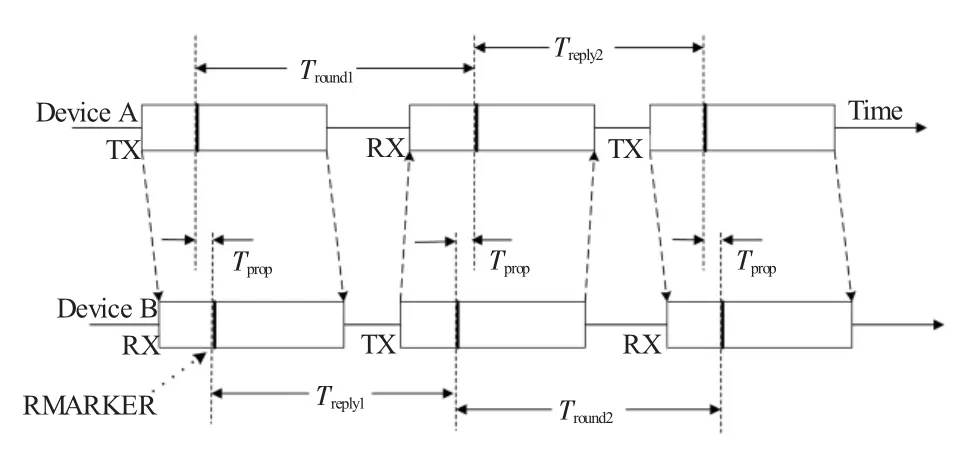
圖1 Two-way ToF算法實(shí)現(xiàn)框圖
設(shè)備A首先向設(shè)備B發(fā)出一個數(shù)據(jù)包,并記錄發(fā)送數(shù)據(jù)包的時(shí)刻Ta1,設(shè)備B收到數(shù)據(jù)包后,記下收包時(shí)刻Tb1。之后設(shè)備B等待時(shí)刻Treply,在Tb2時(shí)刻,向設(shè)備A發(fā)送一個數(shù)據(jù)包,設(shè)備A收到數(shù)據(jù)包后記下時(shí)刻值Ta2。
算出電磁波在空中的飛行時(shí)間Tprop,飛行時(shí)間乘以光速即為兩個設(shè)備間的距離。

1.4 三邊定位算法的實(shí)現(xiàn)
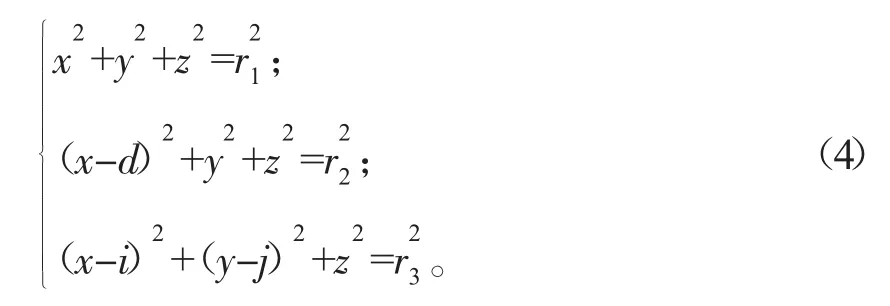
三邊定位算法(Trilateration algorithn)是一種常用的定位算法[9-12],其實(shí)現(xiàn)的方式如圖2所示。設(shè)未知點(diǎn)位置為(x,y,z),令其中第一個球形P1的球心坐標(biāo)為(0,0),P2處于相同縱坐標(biāo),球心的坐標(biāo)為(d,0),P3球心坐標(biāo)為(i,j),3個球形半徑分別為r1,r2,r3。z為3個球相交點(diǎn)與水平面高度,則有:
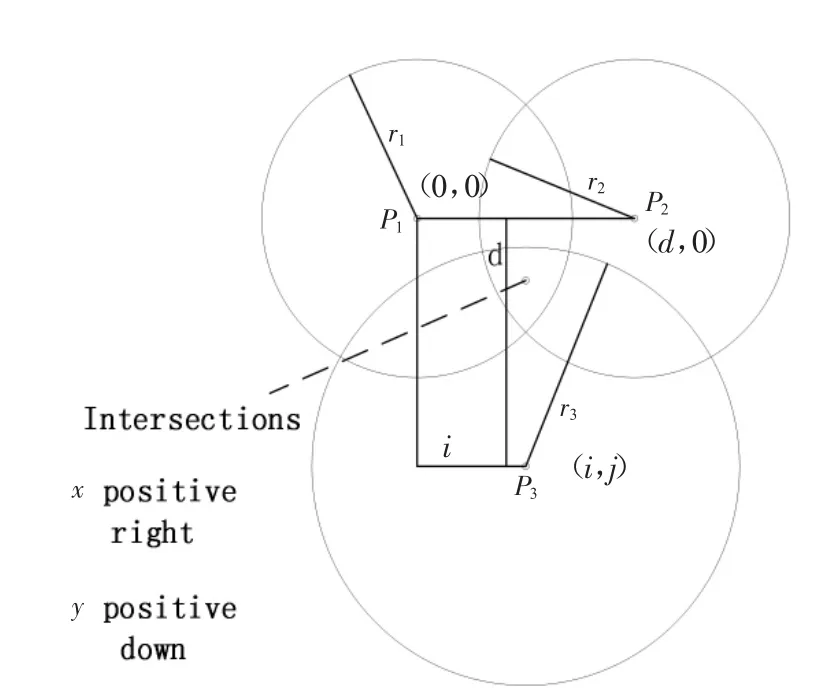
圖2 三邊定位算法圖解
當(dāng)z=0時(shí),即3個圓在水平面上相交為一點(diǎn),首先解出x:

將x代入到式(6)中得到y(tǒng):

為了減少本系統(tǒng)的設(shè)計(jì)成本與算法的復(fù)雜程度,本系統(tǒng)在設(shè)計(jì)定位算法時(shí)選擇了3個基站1個標(biāo)簽的定位模式。這種模式只適合二維定位,但是我們在電子標(biāo)簽上增加了氣壓計(jì)傳感器模塊,利用氣壓計(jì)傳感器模塊獲得標(biāo)簽的高度值。當(dāng)基站的坐標(biāo)固定,且處于同一水平線上時(shí),這種方法可以實(shí)現(xiàn)三維定位功能,一定程度上減少了系統(tǒng)的設(shè)計(jì)成本與算法復(fù)雜程度。
2 系統(tǒng)設(shè)計(jì)
UWB定位系統(tǒng)主要由可移動的電子標(biāo)簽、固定的通信基站、Qt上位機(jī)3大部分組成。在硬件系統(tǒng)中,標(biāo)簽依次向3個基站發(fā)起通訊,得到標(biāo)簽與基站之間的距離,進(jìn)而通過藍(lán)牙模塊將數(shù)據(jù)發(fā)送至上位機(jī)進(jìn)行運(yùn)算和顯示。UWB定位系統(tǒng)的系統(tǒng)設(shè)計(jì)框圖如圖3所示。
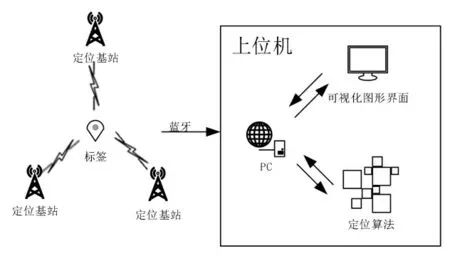
圖3 UWB定位系統(tǒng)設(shè)計(jì)框圖
2.1 硬件電路整體設(shè)計(jì)
系統(tǒng)采用Decawave公司DW1000芯片設(shè)計(jì)推出的超寬帶收發(fā)模組DWM1000實(shí)現(xiàn)測距定位功能。DW1000 UWB芯片是一款按照IEEE802.15.4-2011協(xié)議標(biāo)準(zhǔn)設(shè)計(jì)的超寬帶無線收發(fā)芯片,集成了天線及所有的射頻電路,具有高精度、低功耗等特點(diǎn)。其內(nèi)部框圖如圖4所示。
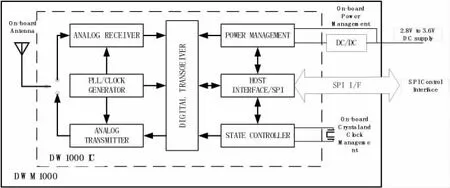
圖4 DWM1000模塊內(nèi)部框圖
本系統(tǒng)采用基站標(biāo)簽一體化的硬件電路設(shè)計(jì),利用DW1000芯片通過撥碼開關(guān)設(shè)置標(biāo)簽和基站。STM32F103芯片為主控芯片,氣壓傳感器用于測量標(biāo)簽高度,藍(lán)牙模塊用于與上位機(jī)數(shù)據(jù)傳輸。如圖5和圖6所示。
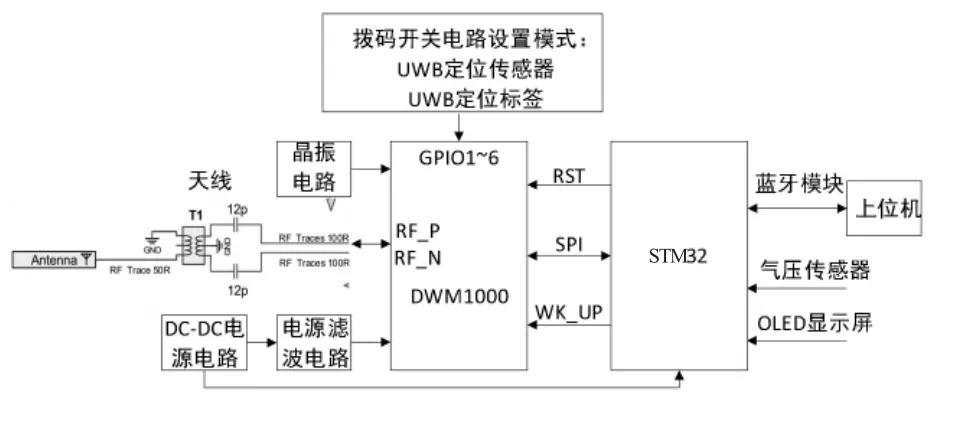
圖5 UWB標(biāo)簽/基站一體化硬件設(shè)計(jì)框圖

圖6 UWB標(biāo)簽/基站硬件電路實(shí)物圖
2.2 軟件功能設(shè)計(jì)
根據(jù)設(shè)計(jì)要求,UWB定位系統(tǒng)基站的程序流程圖如圖7所示。基站上電后,若接收到來自標(biāo)簽的測距請求信號,則與目標(biāo)節(jié)點(diǎn)完成測距交互,然后查詢自身地址。若為0號基站,則將標(biāo)簽發(fā)送的距離數(shù)據(jù)幀,經(jīng)過一定的處理后(處理0x00、0Xff無法正常發(fā)送的問題)發(fā)送至上位機(jī)顯示。
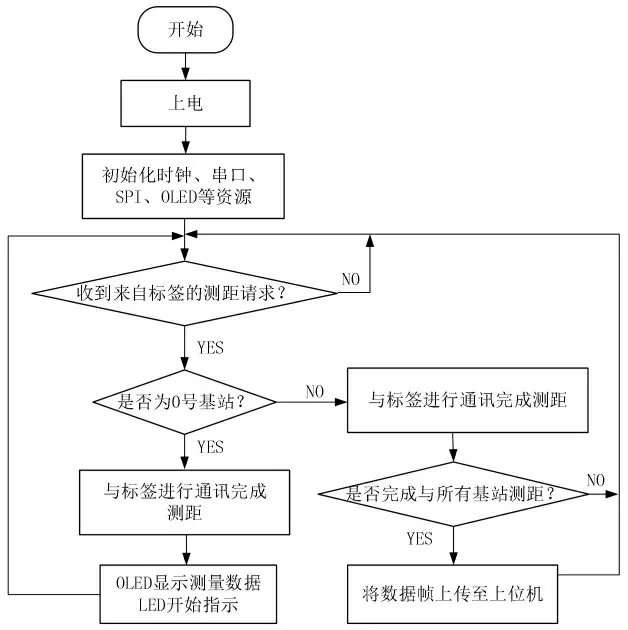
圖7 UWB定位系統(tǒng)基站程序流程圖
UWB定位標(biāo)簽軟件功能流程圖如圖8所示。電子標(biāo)簽上電初始化后,進(jìn)入定位網(wǎng)絡(luò)得到分配的指定地址,然后主動向3個基站依次發(fā)送測距交互請求,進(jìn)行測距交互后獲得標(biāo)簽與3個基站間的飛行時(shí)間,根據(jù)DS-TWR測距方式計(jì)算與各基站之間的距離,并將該距離信息拼幀后傳輸?shù)?號基站(與可視化圖形界面上位機(jī)通訊的基站),以便上位機(jī)坐標(biāo)解算平臺獲取所需距離信息。
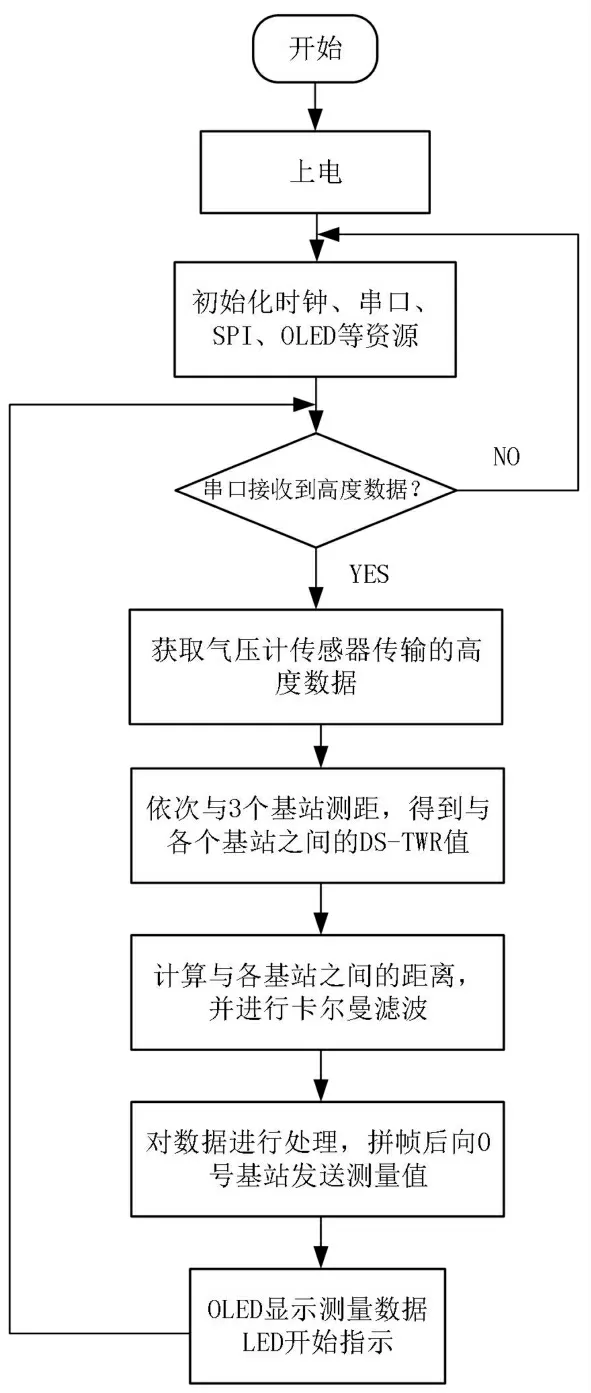
圖8 UWB定位標(biāo)簽軟件功能流程圖
3 測試方案與測試結(jié)果
3.1 測試方案
將標(biāo)簽tag0和3個基站安裝在實(shí)驗(yàn)室的測試環(huán)境,基站an0與an1間距為1.54 m,基站an1與an2間距為6 m,學(xué)生手持標(biāo)簽tag0在實(shí)驗(yàn)室內(nèi)行走,實(shí)時(shí)測試標(biāo)簽與基站的距離,并檢查UWB標(biāo)簽OLED和上位機(jī)顯示該標(biāo)簽/基站的位置信息。如圖9和圖10所示。
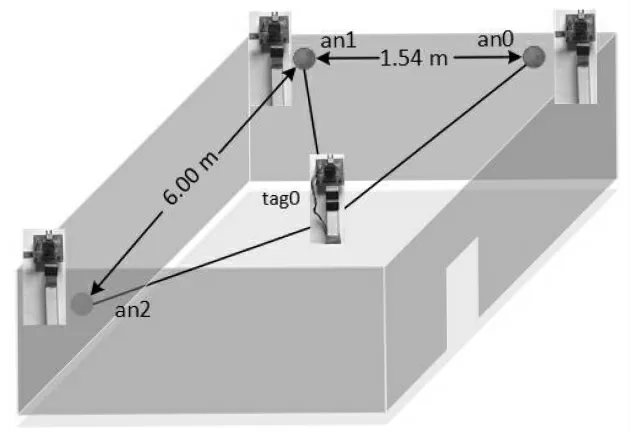
圖9 UWB標(biāo)簽和基站測試示意圖
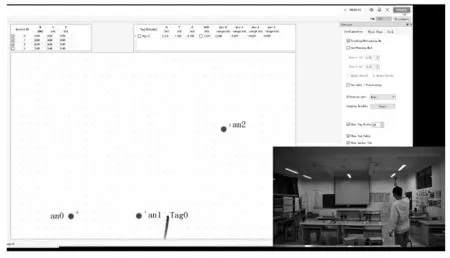
圖10 實(shí)驗(yàn)室實(shí)測環(huán)境與上位機(jī)實(shí)時(shí)顯示
3.2 測試結(jié)果
如圖11所示,以某一組測試數(shù)據(jù)為例。UWB標(biāo)簽Tag0顯示與基站an0、an1、an2的距離分別為0.53 m、0.99 m和3.84 m。上位機(jī)實(shí)時(shí)顯示了標(biāo)簽與基站的坐標(biāo)位置信息及其實(shí)時(shí)運(yùn)動軌跡,如圖12所示。
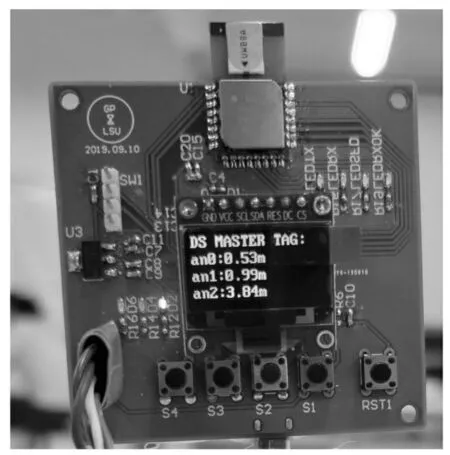
圖11 標(biāo)簽與3個基站的測量距離顯示
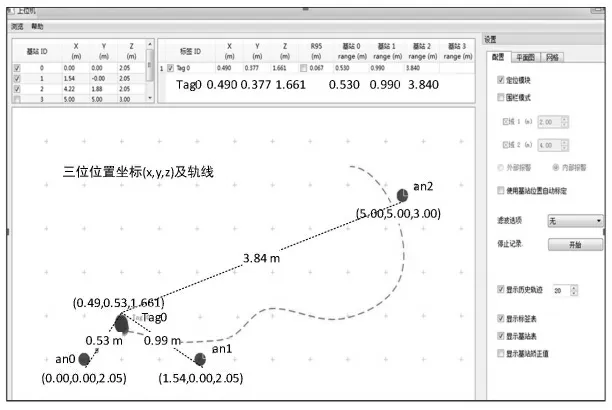
圖12 標(biāo)簽/基站的三維坐標(biāo)位置信息及實(shí)時(shí)軌跡
本系統(tǒng)實(shí)驗(yàn)以標(biāo)簽和基站an2數(shù)據(jù)采集為例,一共測量12次。在經(jīng)過實(shí)際測量后,發(fā)現(xiàn)UWB室內(nèi)定位系統(tǒng)在不同環(huán)境下的定位精度不同,這是因?yàn)椴煌h(huán)境對電子標(biāo)簽/基站測距有不同的干擾因素,如定位標(biāo)簽和基站間的本地時(shí)鐘不同源導(dǎo)致同步上的誤差、天線延遲誤差、經(jīng)緯度誤差等因素,又如7 cm、9 cm和16 cm測距情況下出現(xiàn)了數(shù)據(jù)溢出。因此,在定位系統(tǒng)進(jìn)行布置前,需要對UWB無線收發(fā)模塊進(jìn)行校準(zhǔn),在采集完N次數(shù)據(jù)之后,利用MATLAB,使用最小二乘法將該N個平均值完成曲線線性擬合,并將計(jì)算得到的擬合曲線代入程序代碼中進(jìn)行校準(zhǔn)調(diào)試,使定位系統(tǒng)在該環(huán)境下能夠獲得更高精度的數(shù)據(jù)[13]。系統(tǒng)經(jīng)過校準(zhǔn)后,數(shù)據(jù)測試記錄如表1所示。

表1 實(shí)際距離與模塊測量距離記錄表
通過測試結(jié)果數(shù)據(jù)分析,標(biāo)簽tag0與基站an2測量的距離誤差在10 cm范圍內(nèi)。上位機(jī)也實(shí)時(shí)顯示了UWB標(biāo)簽/基站的三位坐標(biāo)值和軌跡線圖。
4 結(jié)語
本文根據(jù)UWB技術(shù)的特點(diǎn),通過分析其通信技術(shù)和三維定位技術(shù),設(shè)計(jì)了基于DWM1000基站/標(biāo)簽一體化嵌入式硬件系統(tǒng),包括采用DWM1000作為UWB無線收發(fā)器,STM32F103為核心控制器。軟件方面,利用ToF(Time of Flight)算法測量UWB標(biāo)簽與基站間的距離,通過建立三維空間坐標(biāo)實(shí)時(shí)顯示UWB標(biāo)簽的位置信息。實(shí)驗(yàn)數(shù)據(jù)顯示,設(shè)計(jì)的UWB室內(nèi)定位系統(tǒng)具有數(shù)據(jù)傳輸速度快,定位精確(小于10 cm)等特性。
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
