基于向量自回歸模型的高頻地波雷達(dá) 海流異常值的識別算法研究
2021-11-02 11:55:00劉京城
海洋技術(shù)學(xué)報 2021年4期
關(guān)鍵詞:模型
方 今,劉京城
(1.上海市海洋監(jiān)測預(yù)報中心,上海 200062;2. 湖北中南鵬力海洋探測信息系統(tǒng)工程有限公司,湖北 宜昌 443005)
海洋作為社會經(jīng)濟(jì)發(fā)展的重要依托和載體,是國家未來發(fā)展的新方向。監(jiān)測海洋表面流場、風(fēng)場和浪場等重要的海洋動力學(xué)要素,有助于保障海上和沿岸人類活動和安全以及海防事業(yè),有利于發(fā)展海洋經(jīng)濟(jì)、預(yù)防海洋自然災(zāi)害和維護(hù)國家利益。高頻地波雷達(dá)[1]可以全天候地對雷達(dá)波束內(nèi)的中遠(yuǎn)距離(如200 km)海面進(jìn)行實時監(jiān)測,在海態(tài)參數(shù)監(jiān)測中具有不可替代的作用。隨著高頻地波雷達(dá)在探測海洋表面動力學(xué)要素方面的應(yīng)用和發(fā)展,海洋表面流場探測技術(shù)在海態(tài)檢測領(lǐng)域已經(jīng)趨于成熟,各方面的對比驗證[2-3]表明其具有優(yōu)秀的反演性能。目前,國外成型的高頻地波雷達(dá)產(chǎn)品主要有美國SeaSoned系統(tǒng)、德國WERA系統(tǒng)、英國OSCR系統(tǒng)、俄羅斯“向日葵”系統(tǒng)和加拿大SWR-503系統(tǒng)等,國內(nèi)成型的海態(tài)高頻地波雷達(dá)產(chǎn)品主要分為陣列式高頻地波雷達(dá)OSMAR[4]和便攜式高頻地波雷達(dá)OSMAR-S[5]。其中陣列式高頻地波雷達(dá)分辨率更高、探測范圍更遠(yuǎn),而便攜式高頻地波雷達(dá)采用單極子/交叉環(huán)天線,占地面積更小。本文中所選用的數(shù)據(jù)為OSMAR-S100系統(tǒng)反演得到的海流結(jié)果。
由于雷達(dá)站所處電磁環(huán)境一般比較復(fù)雜,電離層的干擾、廣播電臺的干擾、瞬態(tài)干擾以及其他干擾,都會影響雷達(dá)回波的質(zhì)量。雖然已有相應(yīng)的干擾抑制算法[6-7],但這些算法不能一直奏效,因此,海流反演結(jié)果中經(jīng)常會出現(xiàn)時間或空間上的異常值,異常值的存在會影響海流流速和流向的可靠性。一般的海流異常值識別方法[8-9]是在單一維度中進(jìn)行的,能夠識別部分異常值,由于忽略了另一個維度,存在誤識別或漏識別的情況。
向量自回歸(VAR)模型[10]是一種多變量預(yù)測模型,從縱向比較來看,它是單變量時間序列自回歸(AR)模型在多元時間序列上的衍生;從橫向比較來看,它是用線性關(guān)系刻畫一個平穩(wěn)的系統(tǒng)。VAR模型的特性使其在平穩(wěn)的條件下,參數(shù)估計與最小二乘估計一致,并且統(tǒng)計上具有優(yōu)良性質(zhì),便于區(qū)間估計、誤差分析和模型診斷等,可用于刻畫多變量之間相互影響的動態(tài)線性相關(guān)關(guān)系,該模型應(yīng)用在風(fēng)速預(yù)測中[11-12],取得了較好的結(jié)果。
本文基于海流流速在時間維度與空間維度是一個緩慢變化的過程,同一點(diǎn)的海流流速在時間維度與空間維度具有相關(guān)性,提出了基于VAR模型的海流異常值的識別算法,利用OSMAR-S100便攜式高頻地波雷達(dá)數(shù)據(jù),結(jié)合時間域與空間域,通過VAR模型識別高頻地波雷達(dá)海流異常值,從而提高數(shù)據(jù)準(zhǔn)確度。
1 基于向量自回歸模型的海流異常值識別算法
1.1 海態(tài)流場數(shù)據(jù)來源
本文海流異常值識別數(shù)據(jù)來源于基于單極子交叉環(huán)緊湊型天線陣OSMAR-S100便攜式高頻地波雷達(dá),該雷達(dá)部署于上海雞骨礁,坐標(biāo)位于(122.388°E,31.1730°N),工作頻率13 MHz,根據(jù)雷達(dá)指標(biāo),海流最大探測距離80 km,波束覆蓋扇角范圍120°,海流探測的徑向角度和距離分辨率分別為3°和2.5 km,海流測量速度分辨率3 cm,該雷達(dá)系統(tǒng)每6.5 min輸出一場海流數(shù)據(jù)。
下面以雞骨礁站2020年7月5日數(shù)據(jù)為例,對雷達(dá)實際應(yīng)用時的判斷流程進(jìn)行介紹。該日一共產(chǎn)生了221場數(shù)據(jù)。經(jīng)過統(tǒng)計,數(shù)據(jù)點(diǎn)中存在大量缺失情況,圖1展示了數(shù)據(jù)完整性統(tǒng)計的結(jié)果,橫縱坐標(biāo)代表經(jīng)緯度,數(shù)值代表一天中有效數(shù)據(jù)的數(shù)量。圖1結(jié)果表明,越靠近雷達(dá)站,數(shù)據(jù)完整性越高,越遠(yuǎn)離雷達(dá)站,數(shù)據(jù)完整性越低,在20個距離元之后的數(shù)據(jù)基本可以判定不存在或者數(shù)據(jù)可靠性較差。在進(jìn)行數(shù)據(jù)分析時,選擇的位置均位于20個距離元以內(nèi),盡量避免數(shù)據(jù)缺失所帶來的不利影響。
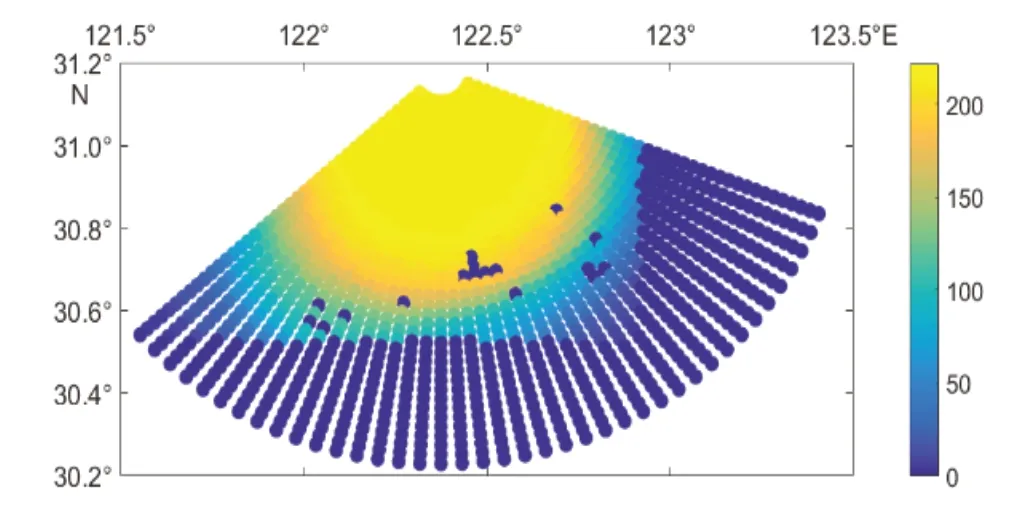
圖1 有效數(shù)據(jù)分布圖
1.2 自回歸模型
OSMAR-S100雷達(dá)系統(tǒng)一天數(shù)據(jù)可視為一個時間序列,海流流速具有時間相關(guān)性,某一時間海流流速與前后兩個時間點(diǎn)流速具有時間相關(guān)性。圖2展示了位置處于數(shù)據(jù)點(diǎn)(122.367°E,30.866°N)的海流觀測值對于不同滯后階數(shù)的自相關(guān)系數(shù),海流流速自相關(guān)系數(shù)隨著滯后階數(shù)的增加而緩慢減小,這種自相關(guān)系數(shù)隨滯后階數(shù)增加而緩慢減小的特征被稱為“ACF圖拖尾”,是AR模型的顯著特征,即AR模型適用于海流觀測值的處理。
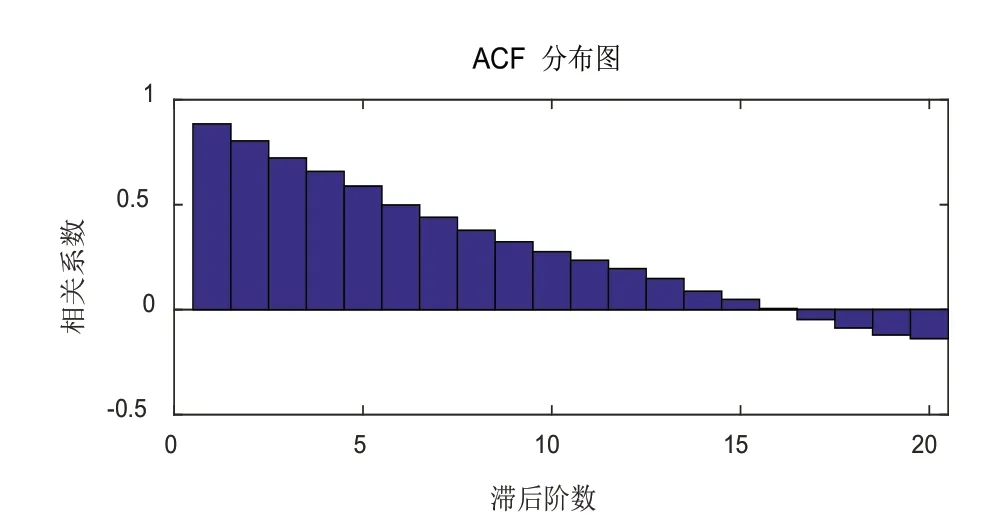
圖2 海流流速不同滯后階數(shù)的自相關(guān)系數(shù)圖
AR模型是一種分析具有時間序列特性數(shù)據(jù)的重要模型,可以表示為:

式中:c為常數(shù);φi為回歸系數(shù);p為AR模型的階數(shù);εt為隨機(jī)誤差,通常認(rèn)為是白噪聲序列,階數(shù)p可從偏自相關(guān)系數(shù)隨滯后階數(shù)的變化情況估計得到,即利用AR模型的偏相關(guān)圖(PACF圖)截尾特征進(jìn)行估計,其中偏相關(guān)性(PACF)是兩個隨機(jī)變量在排除了其余部分或全部隨機(jī)變量影響情形下的凈相關(guān)性或純相關(guān)性,是兩個隨機(jī)變量在處于同一體系的其余部分或全部隨機(jī)變量取給定值的情形下的條件相關(guān)性,偏相關(guān)性由偏相關(guān)系數(shù)決定。圖3展示了上述地理位置的海流流速AR模型PACF圖。平穩(wěn)序列的偏相關(guān)圖表現(xiàn)為截尾,當(dāng)階數(shù)為1的時候,偏相關(guān)系數(shù)值還是很大,為0.814;二階長的時候突然就變成了0.125,后面的值都很小,認(rèn)為是趨于0,這種狀況就是截尾,可作為海流流速AR模型數(shù)據(jù)序列平穩(wěn)的判斷。

圖3 海流流速AR模型PACF圖
圖中紅線為顯著性閾值,超出該值表示該階滯后階數(shù)顯著不為0,反之則表示該階系數(shù)不顯著,可以理解為近似為0。海流觀測值的偏自相關(guān)系數(shù)從二階開始下降到紅線以下,因此海流觀測值符合一階自回歸模型。
1.3 VAR模型
AR模型同樣僅考慮了時間維度,為了同時考慮時間維度和空間維度,我們選取了空間上5個較近位置的海流觀測序列進(jìn)行了分析,所選擇5個位置的空間相對位置示意圖如圖4所示。
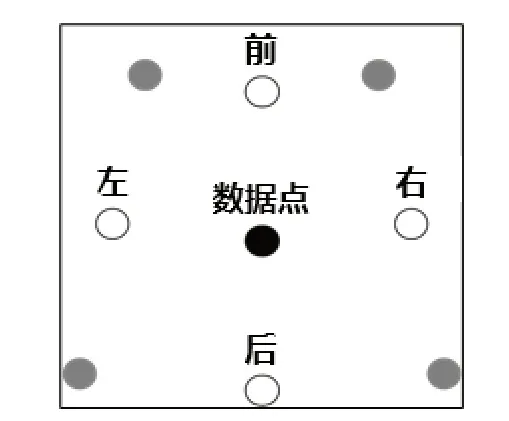
圖4 選取海流的空間相對位置示意圖
統(tǒng)計了數(shù)據(jù)有效范圍內(nèi)一周的所有數(shù)據(jù)點(diǎn)(黑色圓)的海流序列與其一階滯后序列以及周圍較近的4個位置(白色圓)的海流序列間的相關(guān)系數(shù),統(tǒng)計結(jié)果的直方圖如圖5所示。其中數(shù)據(jù)點(diǎn)與其一階滯后序列的相關(guān)系數(shù)代表了時間維度上的相關(guān)性,與周圍的海流觀測序列的相關(guān)系數(shù)代表了空間維度上的相關(guān)性。圖中,80%以上數(shù)據(jù)點(diǎn)的前述5個相關(guān)系數(shù)都大于0.9,表明海流的觀測值在時間維度和空間維度中都具有較強(qiáng)的相關(guān)性。因此,我們對上述5個序列建立了VAR模型,階數(shù)仍沿用AR模型中確定的階數(shù),即建立的模型為一階VAR模型,其表達(dá)式如下。
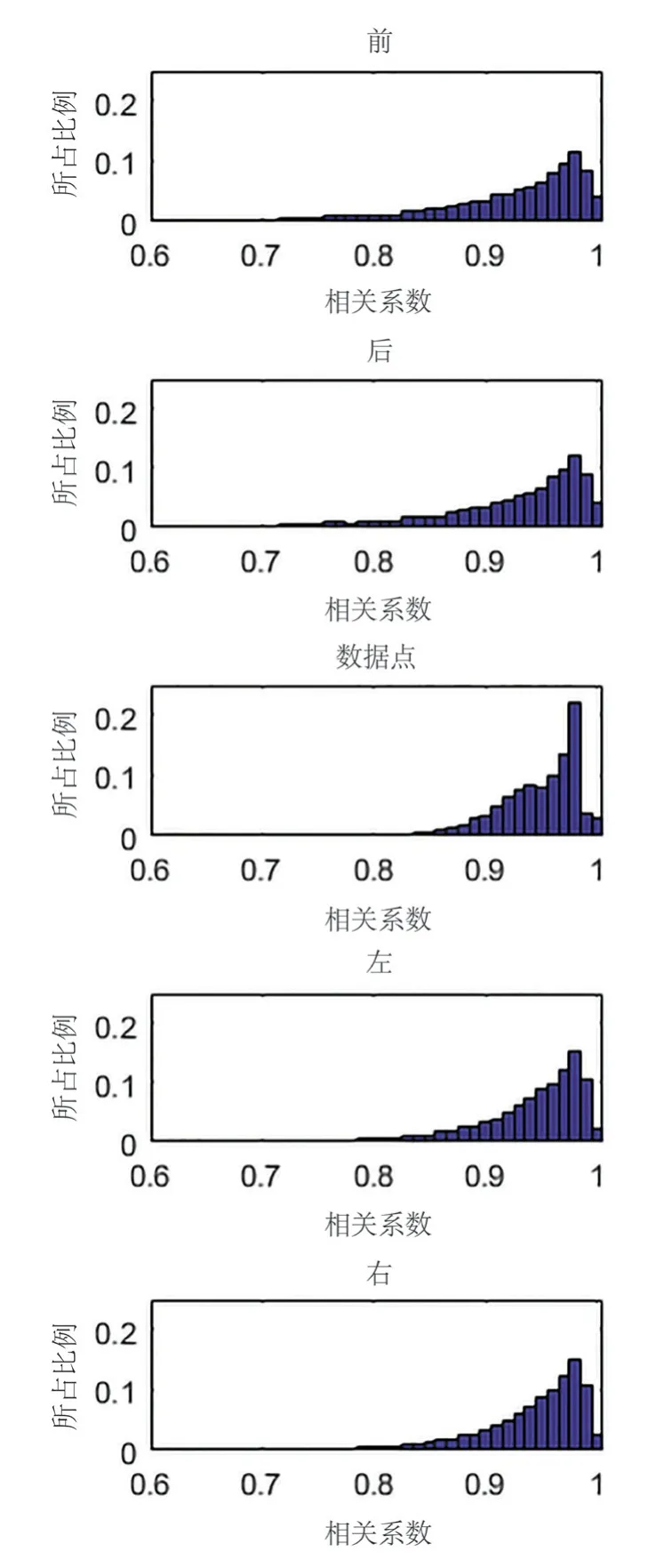
圖5 所有數(shù)據(jù)點(diǎn)時空相關(guān)系數(shù)分布圖

式中:
T為轉(zhuǎn)置運(yùn)算符;Xi為對應(yīng)的海流序列;φi為對應(yīng)的回歸系數(shù),其中,φf為前數(shù)據(jù)點(diǎn)的海流序列回歸系數(shù);φb為后數(shù)據(jù)點(diǎn)的海流序列回歸系數(shù);φs為數(shù)據(jù)點(diǎn)自身海流序列回歸系數(shù);φl為左數(shù)據(jù)點(diǎn)的海流序列回歸系數(shù);φr為右數(shù)據(jù)點(diǎn)的海流序列回歸系數(shù);Xt-1為數(shù)據(jù)點(diǎn)前一時刻海流數(shù)據(jù),數(shù)據(jù)點(diǎn)X通過該時刻其前、后、左、右與前一時刻自身海流數(shù)據(jù)對現(xiàn)海流數(shù)據(jù)驗證。
對式(2)稍做修改,得到式(5)。

式中:


對于式(5),可以利用最小二乘法求解其系數(shù)向量θ。

2 海流異常值識別
根據(jù)海流的時間維度與空間維度相關(guān)性提出的一階VAR模型是一種線性預(yù)測模型,根據(jù)式(2),通過某位置前一時刻的海流以及臨近4個位置的海流,可以預(yù)測該位置當(dāng)前時刻的海流。預(yù)測海流與真實海流之間的差值被定義為殘差,如式(9)所示。

式中:r為殘差序列;X為真實海流序列;為預(yù)測海流序列,理論上,認(rèn)為r是均值為0、方差不隨時間改變的白噪聲序列。
殘差序列的標(biāo)準(zhǔn)差反映了殘差整體的性質(zhì),殘差標(biāo)準(zhǔn)差越大說明模型擬合效果越差,殘差中還可能殘留系統(tǒng)部分的信息。對于單個殘差點(diǎn)而言,如果它的絕對值超過了3倍殘差標(biāo)準(zhǔn)差,則說明該點(diǎn)在99%的顯著性水平上不等于0,不滿足白噪聲序列的假設(shè),則可以標(biāo)記為海流異常值,對于標(biāo)記出來的海流異常值,用VAR模型的估計值代替原始的異常值,從而實現(xiàn)對海流異常值的識別及修正。
3 結(jié)果與分析
本文通過對位于上海雞骨礁的OSMAR-S100便攜式高頻地波雷達(dá)站海流反演數(shù)據(jù)進(jìn)行分析與處理,驗證了基于VAR模型的高頻地波雷達(dá)海流異常值識別算法的有效性,并統(tǒng)計了海流異常值在空間和時間上的分布情況。
在對海流進(jìn)行處理時,以天為間隔進(jìn)行處理,共處理了一周的數(shù)據(jù)。針對檢測點(diǎn)每一天的海流時間序列,利用最小二乘法估計出模型參數(shù),建立一階VAR模型,圖6對比了一個位置海流時間序列VAR模型估計的海流與雷達(dá)輸出的海流,二者結(jié)果非常接近,表明利用VAR模型預(yù)測某一時刻的海流切實可行。兩條曲線之間的差值即為殘差,根據(jù)殘差的結(jié)果判斷并標(biāo)記出所有的海流異常值。圖7展示了部分被標(biāo)記為異常海流值的殘差序列以及相鄰的5個海流序列,海流曲線中紅色實線代表檢測點(diǎn)的海流序列,虛線部分代表周圍4個點(diǎn)的海流序列,殘差曲線中為判決閾值,超出紅線范圍的殘差即被標(biāo)記為異常值,對應(yīng)位置的海流被標(biāo)記為異常海流值。圖7結(jié)果表明,當(dāng)檢測點(diǎn)的變化趨勢與周圍點(diǎn)的變化趨勢明顯不同,或者檢測點(diǎn)本身出現(xiàn)較劇烈的變化時,檢測點(diǎn)會被標(biāo)記成為異常點(diǎn),這與人們對于海流的認(rèn)識(海流在空間和時間上是緩慢變化的)基本一致,即在時間維度和空間維度上變化劇烈的海流為異常海流值。
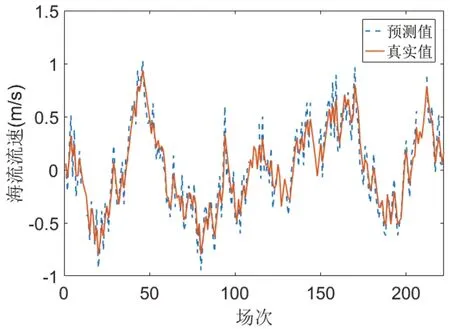
圖6 VAR模型預(yù)測海流與雷達(dá)輸出海流對比
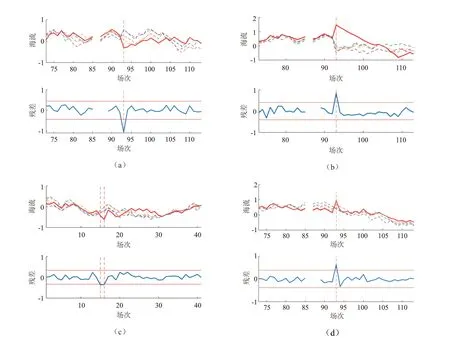
圖7 VAR模型識別的部分異常值及其殘差
本文對一周內(nèi)的海流數(shù)據(jù)進(jìn)行了異常識別,結(jié)果表明對于孤立的異常值,該算法具有較好的識別效果,但是對于連續(xù)的異常值,可能由于后續(xù)變化趨勢一致而無法被識別出來,見圖7(a)和圖7(b),這種比較復(fù)雜的情況需要進(jìn)一步改進(jìn)預(yù)測模型予以判斷。同時,本文統(tǒng)計了海流異常值在時間和空間上的分布情況,統(tǒng)計結(jié)果如圖8所示。受雷達(dá)波束和距離衰減的影響,在空間上海流異常值的數(shù)量隨距離的增加而增加,且偏離陣列法線方向越遠(yuǎn),異常值數(shù)量越多。而其在時間上的分布,近似于均勻分布,僅在少數(shù)時刻異常值數(shù)量偏大,表明該場次數(shù)回波受到了較強(qiáng)的外部干擾。
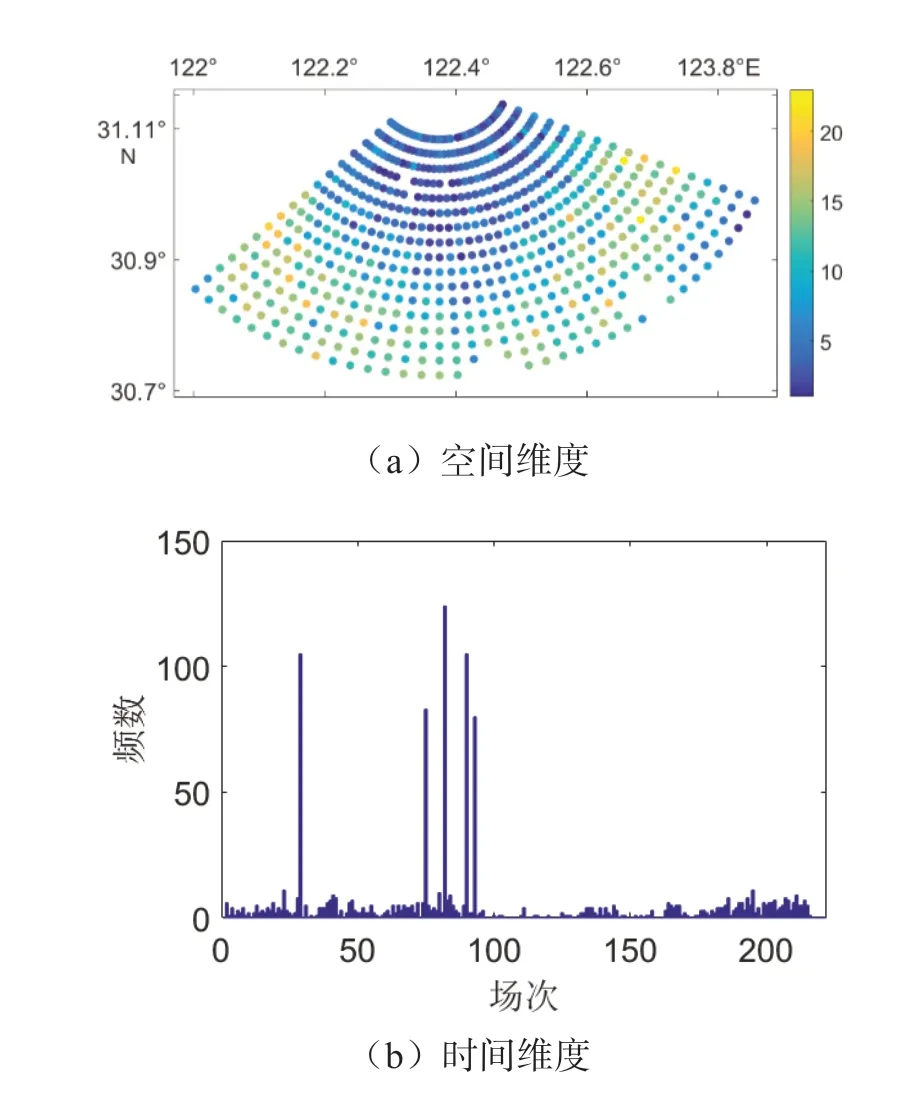
圖8 海流異常值在空間維度和時間維度上的分布
4 結(jié) 論
高頻地波雷達(dá)在海洋表面環(huán)境觀測方面具有超視距、大范圍、全天候的特性。針對高頻地波雷達(dá)海流結(jié)果中的異常值,本文提出了基于VAR模型的高頻地波雷達(dá)海流異常值的識別算法。由于本文算法通過空間與時間維度對海流流速進(jìn)行趨勢分析,在區(qū)域流速較大和較小時,這種異常點(diǎn)識別方法依舊能正常工作。通過對區(qū)域海流流速進(jìn)行基于VAR模型的時間維度分析,可提高高頻地波雷達(dá)海流數(shù)據(jù)的準(zhǔn)確性。整體上看,基于VAR模型的高頻地波雷達(dá)海流異常值的識別算法能夠為海流產(chǎn)品和流場時空分布分析提供準(zhǔn)確的數(shù)據(jù)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
