城市客車遠程監控系統的設計與應用
2021-11-03 08:38:14黃文青陳凌珊
農業裝備與車輛工程 2021年10期
黃文青,陳凌珊
(201620 上海市 上海工程技術大學 機械與汽車工程學院)
0 引言
隨著汽車行業向“電動化、智能化、網聯化、共享化”方向的不斷發展,汽車的技術含量在得到大幅提升的同時,對于安全可靠運行的要求也在提高[1]。但在現實環境中,由于車輛受到的干擾越來越多,行駛工況越來越復雜,能否實時有效地監控并獲取車輛狀態信息就很重要[2]。此外,如果能將這些信息進行有序存儲與管理,不僅能為車輛的售后服務與維護工作提供便利,也能為整車與零部件的設計制造、智能化研究提供更多的數據積累[3]。為此,早在2009 年工信部就頒布了關于汽車遠程監控的初期法規[4],后來又制定了GB/T 32960-2016 《電動汽車遠程服務與管理系統技術規范》等更細致的標準與要求[5]。在此背景下,本文以城市客車為研究對象,設計了一種遠程監控系統用于車輛與外界的通訊和數據管理,以滿足相關部門對于新能源車輛的監控和評價維護要求[6]。
1 遠程監控系統架構
本文中設計的城市客車遠程監控系統采用分布式的系統架構,主要由車載終端、智能云平臺和應用集三大部分組成,具體內容如圖1 所示。車載終端通過CAN 總線從各控制器獲取內部數據和故障信息,同時從各零部件的數據獲取客車的實時運行信息(主要是位置信息和行駛車速),再利用GPRS 無線網絡將這些數據上傳至智能云平臺。此外,車載終端也接收從云平臺下發的DBC 與指令,從而完成與云平臺的通信。智能云平臺由數據服務、數據存儲集群、數據分析集群和數據接入解析集群構成。其中,數據服務通過分布式Restful 數據接口實現與應用集的信息交互,并提供相應的服務;數據存儲集群由Elastic Search 集群、分布式文件系統和數據庫集群組成,實現對客車行程數據、故障報警等實時/歷史數據文件的存儲與快速訪問;數據分析集群由實時計算引擎Spark Steaming、離線計算引擎Spark SQL 和分布式消息隊列組成,可以支持大數據實時、離線可視化分析,并存儲數據接入解析集群中的報文解析結果;數據接入解析集群主要是報文接收器和報文解析器,兩部分之間可完成路由轉發、負載均衡和自動失敗重試等過程。

圖1 系統架構Fig.1 System architecture
2 系統功能設計
2.1 功能方案
遠程監控系統主要用于城市客車的數據監控和數據管理,故而設計有車輛監控、遠程診斷、數據管理與分析、試驗管理、基礎數據管理、系統管理六大功能模塊,如圖2 所示。
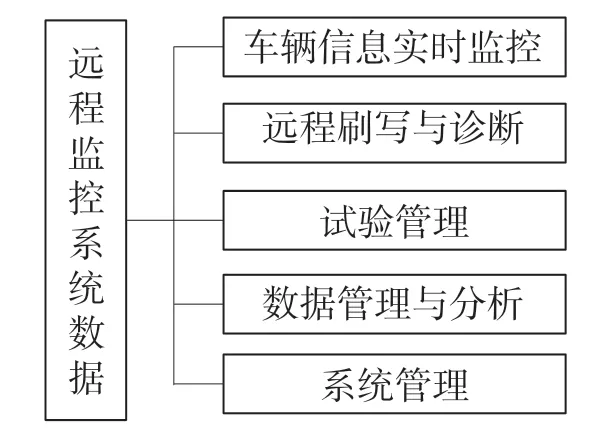
圖2 系統功能方案Fig.2 System function scheme
(1)車輛信息監控。系統實時獲取車輛數據以及定位信息,用戶可以查詢每輛客車在任何時間段內的行駛軌跡與使用情況。當有故障報警時,云平臺和用戶端能同時發出提醒。
(2)遠程刷寫與診斷。當客車出現電控相關故障時,用戶可以通過系統實時獲取J1939 故障代碼,并進行遠程故障診斷。此外,系統也支持UDS(Unified Diagnostic Services,統一診斷服務)協議,可進行ECU 遠程刷寫、故障查詢、控制、版本查詢等相關操作。
(3)數據管理與分析。系統可以將客車的總線信號、GPS 定位、司機的駕駛操作等信息進行采集和存儲。對于本地的存儲數據,用戶可以對其進行查詢、導入、下載和分析等操作,數據格式也能兼容Vehicle Spy 3,CANoe 等主流總線診斷工具。除了本地存儲外,系統還可以將這些信息無線傳輸至后臺,存儲在后臺服務器中。
(4)試驗管理。系統支持包括試驗科目、試驗數據、試驗進度、試驗人員等信息的管理,主要用于解決客車各類試驗數據的管理問題,實現數據集中管理、分類索引、快速查找、數據共享和數據安全等功能。
(5)基礎數據管理。系統為用戶提供了車輛信息、終端信息、ECU 信息、SIM 卡信息、試驗場地信息等的管理功能,支持對這些信息的增加、刪除、修改、查詢等操作。
(6)系統管理。系統為用戶提供了操作權限的集中管理功能。操作權限的集中管理包括定義操作者角色、設定系統用戶和設置功能權限。這一方面可以保障系統的使用安全性,另一方面也可以對系統各個子模塊的操作進行協調,保證其各負其責、相關流程進行順暢。
2.2 智能信息管理
為了便于對遠程監控系統數據進行管理,本文設計了一個智能管理系統。該系統由3D 屏幕顯示系統、場地管理系統、試驗管理系統、試驗預約系統、門禁系統、GPS系統和終端6部分組成,能從監控系統采集的數據中獲取車輛與駕駛員信息、場地情況、駕駛員評價數據、測試車輛數據、測試進度數據、遠程刷寫控制接口、試驗預約確認和試驗進度數據等信息,從而實現與遠程監控系統的通訊和對監控數據的有效管理,具體內容如圖3 所示。
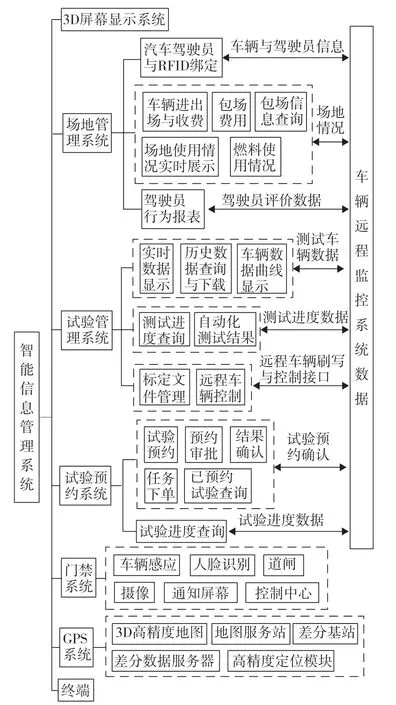
圖3 信息管理系統功能框架Fig.3 Functional framework of information management system
3 系統安全性能設計
本系統比較注重數據傳輸與處理過程中的信息安全,其對于安全性能的設計主要表現在終端接入安全、平臺安全和數據訪問安全3 個方面,如圖4 所示。
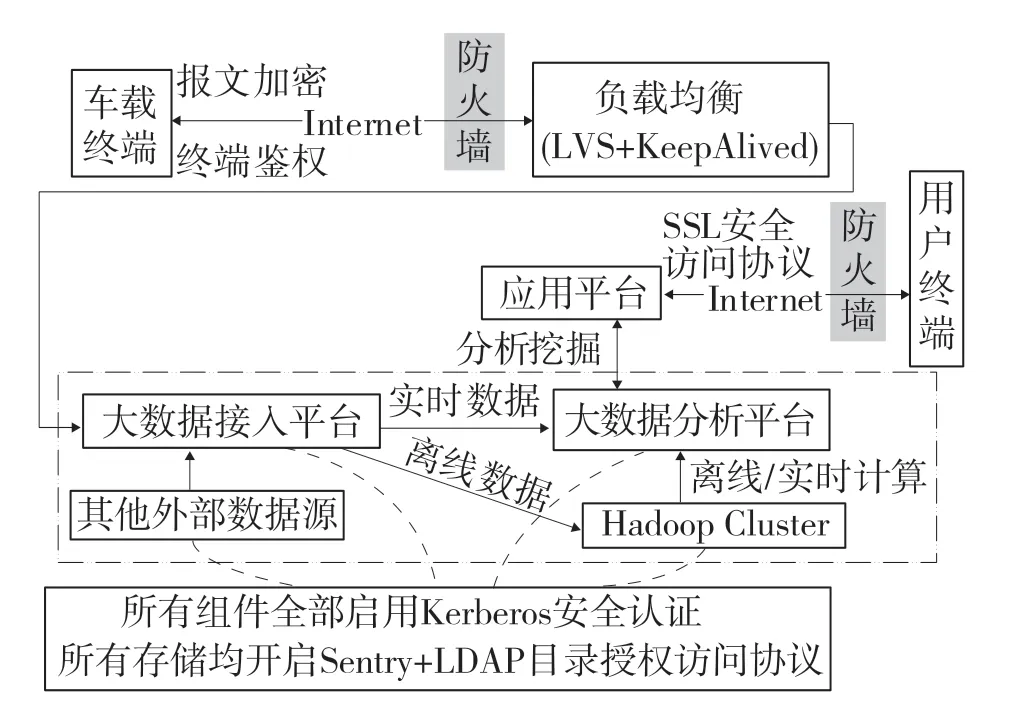
圖4 系統安全設計Fig.4 Design of system security performance
(1)終端接入安全。終端通過4G 網絡與平臺進行通信,報文可采用RSA加密方式進行傳輸,數據傳輸安全性得到了保證。所有終端在連接平臺時會進行鑒權操作,此時會對終端信息進行校驗,只允許在庫的終端進行接入。
(2)平臺安全。平臺在外網接入端設置有防火墻,數據傳輸整個鏈路過程中的所有組件全部開啟了Kerberos 安全認證。
(3)數據管理與分析。數據在Hadoop 集群及各類大數據組件(如Zookeeper/Kafka/Hbase/Hive/HDFS 等)中全部開啟了Sentry 授權服務和LDAP 目錄訪問權限,所有操作均進行日志審計,保證了數據的安全性。
4 系統硬件實現
本系統的硬件主要由T-BOX,V-BOX,S-BOX 三者組成,其中T-BOX 與V-BOX 之間通過Ethernet相連接,T-BOX 與S-BOX 通過CAN 總線項連接,其硬件框架如圖5 所示。
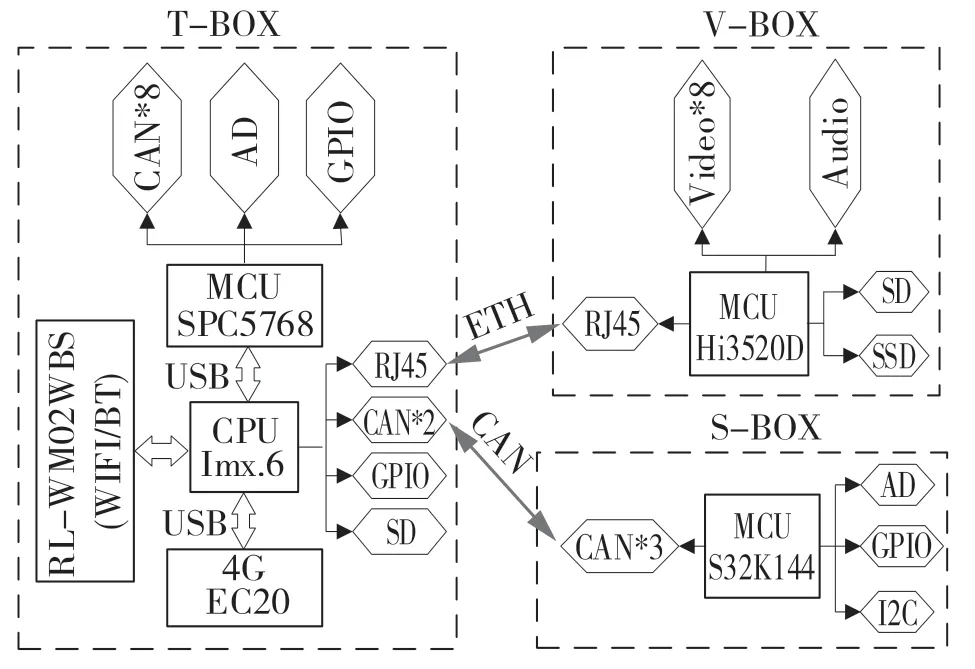
圖5 系統硬件框架Fig.5 System hardware framework
T-BOX 采用4G 通信方式,通過EC20 通信模塊實現數據的實時傳輸;有10 路CAN 總線接口,2 路GPIO 通用接口,CPU 內置六軸向加速度傳感器。MCU 選用SPC5768,支持外接開關量、模擬量數據采集設備。CPU 支持SD 存儲卡存儲。通過Ethernet 連接V-BOX 進行視頻數據采集與上傳;支持遠程固件升級。支持原始CAN 報文及解析后的參數兩種存儲方式。具有遠程故障診斷功能,支持SAE J1939,UDS,OBD 等診斷協議。
V-Box 的MCU 選用Hi3520D,支持8 路視頻存儲,1 路音頻存儲。存儲方面,支持內部固態SSD 存儲與SD 存儲卡存儲。支持網絡觸發視頻文件上傳與本地觸發視頻上傳功能,能實時查看攝像頭視頻數據。通過Ethernet 連接T-BOX,支持實時配置終端參數;支持遠程固件升級。
S-Box 的MCU 選 用S32K144,支 持8 路24位高精度數據采集,誤差控制在±0.2 V。支持CAN 總線將數據上傳至T-BOX,也可通過CAN總線進行模塊功能配置。
5 系統功能應用
本系統以某型純電動城市客車作為試驗車輛,主要驗證其在車輛監控、故障診斷以及數據管理分析方面的應用情況。
5.1 車輛監控
5.1.1 車輛實時監控
本系統支持車輛的實時定位、跟蹤定位及歷史軌跡回放,跟蹤及回放時的車輛運行軌跡可以直觀地顯示在監控界面,便于用戶及時掌握車輛個運行情況,如圖6 所示。
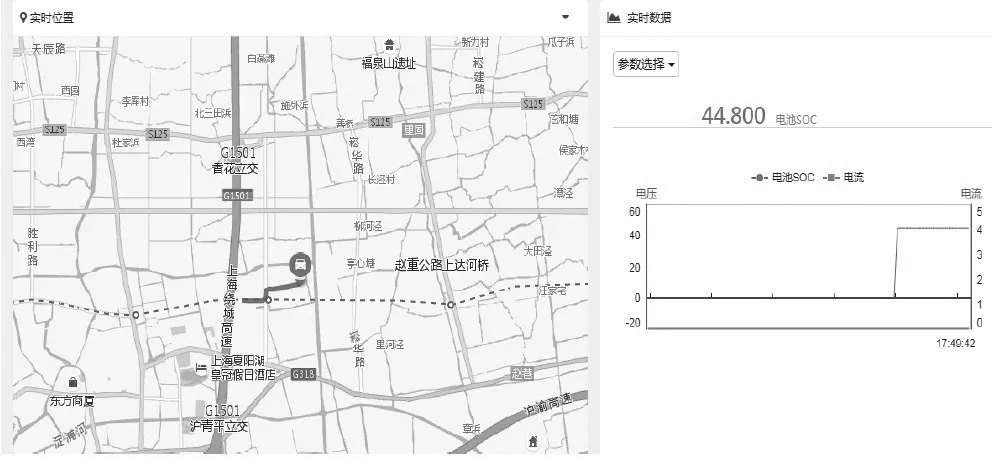
圖6 車輛實時狀態監控Fig.6 Real-time monitoring of vehicle status
5.1.2 車輛數據明細
本系統支持用戶對試驗車輛部件信息(BMS、VCU 等)、運行信息(車速、里程等)、故障信息等進行統計分析,同時兼具查詢車輛歷史數據功能,為分析車輛狀態和某一時刻的運行狀況提供依據,如圖7 所示。

圖7 車輛部件信息采集Fig.7 Collection of vehicle parts information
此外,用戶也可以通過該系統查詢一段時間范圍內的某輛車的主要零部件的相關性能參數值,如圖8 所示。
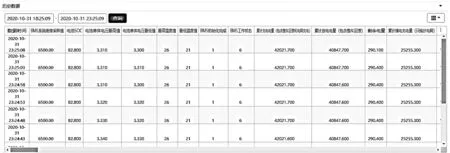
圖8 車輛數據查詢Fig.8 Inquiry of vehicle data
5.2 故障診斷
5.2.1 故障代碼庫
試驗車輛的遠程監控協議在本系統內都會有固定的數據字典與其對應,數據字典的內容即為系統監控界面顯示的車輛信息,每個數據字典的故障碼會上傳到系統代碼庫,車輛發生報警時會自動調用對應數據字典的故障,如圖9所示。

圖9 故障代碼庫Fig.9 Fault code database
5.2.2 UDS 故障診斷
本系統支持UDS 診斷協議,可以查詢指定時間段內試驗車輛的故障報警等級與內容、報警的起止時間和發生故障時車輛的位置信息,如圖10 所示。

圖10 故障診斷與查詢Fig.10 Fault diagnosis and inquiry
5.2.2 ECU 遠程刷寫與控制
本系統建立了用戶與試驗車輛之間的物理通信鏈接,為遠程ECU 數據通信奠定了基礎。通過權限認證和安全確認,可以遠程為試驗車輛ECU 進行刷寫與控制操作,流程如圖11 所示。
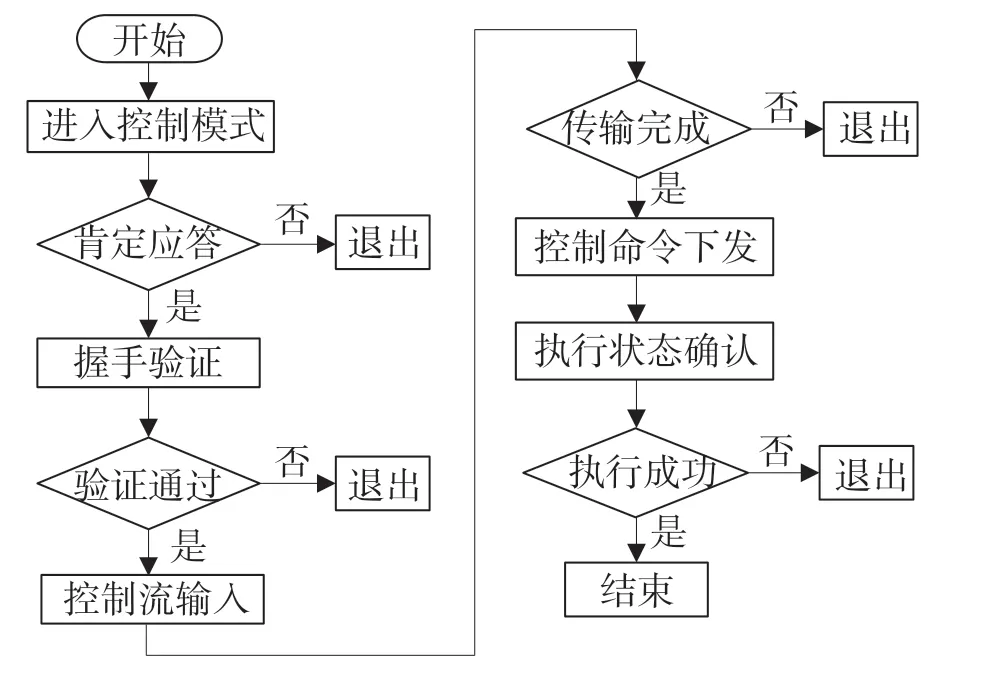
圖11 ECU 遠程刷寫流程Fig.11 Process of ECU remote flashing
6 結語
本文設計的城市客車遠程監控系統能夠實現城市工況下對客車的狀態監控、遠程診斷與數據管理。另外,該系統擁有較大的數據容量和較強的信息安全性,不僅為城市客車的運營與監管提供了便利,而且能為客車智能駕駛算法的設計與優化提供一手數據,具有良好的應用前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
中外會展(2014年4期)2014-11-27 07:46:46
