蝶形光通信激光器的耦合規律與封裝工藝研究
2021-11-06 02:24:36劉粵慧仲順順曹小兵段吉安
激光技術 2021年6期
劉粵慧,仲順順, 曹小兵*,段吉安
(1.中南大學 機電工程學院,長沙 410083;2.中南大學 高性能復雜制造國家重點實驗室,長沙 410083)
引 言
蝶形光通信激光器是一種重要的有線光通信網絡光器件,具有發射功率大、鎖波功能、性能穩定等諸多優點,適用于粗波分復用、密集波分復用、頻分復用等復雜光通信系統[1],在全光網絡與5G通信領域有著廣泛的應用。在組建光通信網絡時,激光器的選取直接影響信息傳輸距離、通信速率與質量,從而影響整個通信系統的綜合性能。采用蝶形光通信激光器可有效增加信息傳輸距離、提高通信速率,研究蝶形光通信激光器耦合封裝規律及工藝具有重要的工程價值與實用意義。
根據應用場合與發射功率的不同,有源光電子器件封裝形式主要分為:同軸型封裝、雙列直插式封裝、蝶形封裝等[2]。相對于其它類型的器件,蝶形光通信激光器的耦合封裝難度在于:在含有透鏡封裝時,透鏡的全自由度空間移動增加封裝難度,透鏡和光纖三件式的對準在工藝上也具有一定的難度,應確定透鏡與光纖的不敏感方向。因此,研究蝶形器件的耦合機理十分重要,能夠為接下來蝶形激光器的耦合封裝研究提供方向和依據。為了優化激光器與光纖的耦合系統,YU等人[3-4]從耦合機理出發,對耦合系統的橫向偏移與縱向偏移進行分析,根據研究結果對透鏡結構參量進行了改進。JIANG等人[5]對分布式反饋激光器的分立式與直接式耦合方式進行了對比分析,討論了各自由度的偏移對耦合效率的影響。CHEN[6]根據蝶形激光器光纖直接耦合的模場匹配原理,以耦合效率為衡量標準,對比得出具有高耦合效率的光纖微透鏡類型。為了提高半導體激光器與單模光纖的耦合效率,SANKAR等人[7]在上錐形光纖的前端制備適當焦距的微透鏡。MANDAL等人[8]研究了半導體激光器與單模光纖耦合時存在的橫向偏移和角度偏移,并且通過在光纖尖端倒置錐形半球面微透鏡,達到提高耦合效率的目的。已有的文獻中[3-8]大多以光學元件空間位置誤差與耦合效率的關系為主,也有探究光學元件定位誤差對光斑形狀與位置的影響[9]。然而,這些文獻中對于激光器耦合的研究主要集中在耦合效率方面[3-12],并沒有考慮到后續封裝工藝對耦合效率的影響。因此,有必要對蝶形激光器耦合封裝工藝進行研究。
本文中基于耦合理論,結合蝶形光通信激光器的實際光路,建立了仿真模型,并對耦合規律進行了分析,引入容忍度的概念,將耦合效率與容忍度結合,分析元件空間位置的變化對耦合效率的影響,得出封裝順序為先透鏡、后光纖。為了驗證仿真結論以及排除耦合順序的影響,對兩種封裝方式進行了對比實驗驗證,對其后續的封裝及器件結構改進提供可靠的指導。
1 激光器耦合理論
蝶形光通信激光器作為光發射機封裝的一種重要形式,其性能影響光信號的傳輸距離和接收機的信號質量。宏觀上,蝶形封裝中的分布式反饋半導體激光器(distributed feedback laser,DFB)芯片和單模光纖(single mode fiber,SMF)的耦合效率η可以定義為[13]:
(1)
式中,Ps表示SMF端面接收到的功率,Pout表示DFB激光器的發射功率。
微觀上,蝶形光通信激光器的耦合主要表現為DFB芯片模場和SMF模場的耦合。DFB激光器快軸發散角通常大于慢軸發散角,由其遠場特性可知,模場分布通常呈橢圓形[13],而SMF的模場分布通常呈標準圓形,如圖1所示。其中A表示DFB芯片的在光纖端面的模場分布部分,C表示SMF的模場分布部分,B表示SMF和DFB芯片重合的模場部分。影響DFB芯片光束和SMF模場耦合效率的因素較為復雜,綜合分析主要分為兩種:一種是兩者模場的匹配程度,包括模場的形狀、發散角等;另一種是機械誤差,包括SMF與DFB芯片的空間對準誤差等因素。假設SMF傳輸過程中某個定點的光輻射強度為EEMF,DFB芯片的光輻射強度為EDFB,兩者模場重合部分B的面積為S,根據幾何光學中的波動理論,模場耦合效率η可根據下式計算[13-14]:

Fig.1 Schematic diagram of coupling between DFB chip and SMF mode field
(2)
式中,ESMF為SMF的光輻射強度,EDFB為DFB芯片的光輻射強度,S為SMF與DFB模場重合部分面積。
2 激光器耦合仿真結果與分析
2.1 光學仿真模型
2.1.1 激光器與單模光纖模型 本文中以DFB芯片與G.652型號的國產平頭光纖為研究對象,工作波長為1310nm。其中,DFB芯片的遠場模場分布情況如圖2所示,為橢圓形光斑。SMF的模場直徑約為9.2μm±0.2μm,數值孔徑(numerical aperture,NA)為0.14。首先利用ZEMAX光學仿真軟件建立了SMF理論模型,選擇牌號為FK3和N-FK58的石英玻璃分別作為SMF的纖芯和包層的材料。圖3中通過設置探測器來進行SMF模場監測,探測器位于SMF出射面后10μm處。通過探測器數據可以看出,從光纖的中心點到光纖邊緣其光功率的下降是呈對稱趨勢的,位于中心點處的輻照度最高,位于SMF邊緣的輻照度最低,圖3a與圖3b中分別為x與y軸截面的模場分布,圖3c與圖3d中分別為3維與2維SMF模場分布情況。由此可見,SMF模場形狀基本按照標準高斯模場分布[15-16],光斑為標準的圓形。對比發光芯片與SMF的模場分布可知,兩者模場匹配度低,耦合效率低。
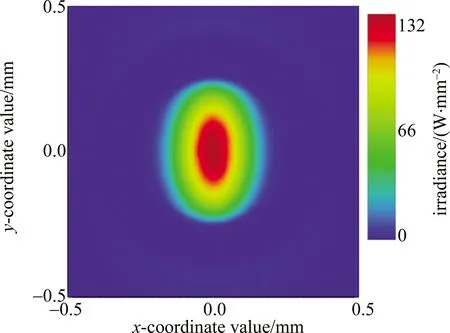
Fig.2 DFB module field simulation

Fig.3 SMF mode field simulation
2.1.2 激光器芯片-透鏡-SMF仿真模型 激光器與光纖耦合大致上分為兩大類:直接耦合與透鏡耦合[17-19],其中,最簡單的是DFB芯片與SMF直接耦合,根據模場匹配理論,耦合效率十分低下,僅為10%左右[20],且光纖和DFB容易產生接觸,為提高耦合效率,參考某光器件公司蝶形器件模型,在激光器芯片-SMF直接耦合模型的基礎上引入單透鏡,利用ZEMAX仿真軟件建立含有透鏡的仿真模型,首先,找到模型的最大耦合效率,然后,在最大耦合效率狀態下,引入各自由度的擾動,由此分析耦合效率隨SMF與透鏡自由度變化而變化的趨勢,并對變化的原因進行分析。
為了增加激光器與光纖的模場匹配度,采用非球面透鏡對光束進行聚焦。非球面透鏡表面的標準方程如下:
(3)
式中,Z(r)表示透鏡的表面形狀,r2=x2+y2,c為曲率半徑的倒數,k為曲面的圓錐系數,A2r為i階的系數。
在模型仿真中,采用非序列非相干強度數據(non-sequential detector data,NSDD)、非序列光線追跡(non-sequential ray tracing,NSTR)操作數對透鏡參量進行優化,進行百萬次光線追跡后,得到較為理想的光斑形狀與尺寸,近似圓形,與SMF的模場匹配度提高。DFB芯片-透鏡-SMF系統耦合模型建立如圖4所示。主要包括DFB芯片、λ/4波片、非球透鏡和SMF,仿真中非球透鏡與芯片的距離設定為200。其中,λ/4波片的主要作用是對芯片的偏振光進行偏振方向改變,相當于隔離器作用,防止光纖端反射的光線再次射入到DFB芯片,對DFB芯片造成破壞。
假設芯片發出的光束(入射光)為線偏振光,偏振態為:
(4)
λ/4波片的瓊斯矩陣為:
(5)
(6)
式中,θ代表波片快軸與x軸的夾角,δ代表波片快軸與慢軸光矢量的相位差。λ/4波片快軸與軸45°角,相位差為π/2。

Fig.4 DFB chip-lens-SMF simulation model
反向從λ/4波片出來的光與入射光的偏振態剛好正交,不能通過激光器的芯片,因而達到隔離的目的[21],同時,由于正交關系,返回的光與入射光的相互作用力很小,從而不對激光器發光產生影響。
2.2 空間位置誤差對耦合效率的影響
2.2.1 SMF 5個自由度變化對耦合效率影響 為方便表示耦合效率與空間位置變化之間的關系,現定義容忍度為在耦合效率下降一定數值情況下,元件的空間位移或者旋轉角度數值的大小。在進行模型推導過程中,以最大耦合效率點為零點建立坐標系,引入了空間位置誤差對耦合效率的影響,經過ZEMAX建模后可以直觀地看出空間位置誤差與耦合效率的變化關系,得出耦合系統元件各個方向的容忍度。圖5分別表示耦合效率隨x軸、y軸位移和角度的變化而變化的規律。系統的最大耦合效率為25.49%,并且,耦合效率的變化趨勢以零點為中心呈現對稱的規律。以耦合效率下降ηd=10%作為比較,圖5a中,x軸的位移容忍度Ts,x=±4.3μm,y軸的位移容忍度Ts,y=±2.8μm,x軸的位移容忍度明顯大于y軸的位移容忍度;圖5b中,x軸的角度容忍度Ta,x=±8°,y軸的角度容忍度Ta,y=±9.9°,x軸的角度容忍度略小于y軸的角度容忍度。

Fig.5 Influence of spatial position change of SMF on the x-axis and y-axis on coupling efficiency
匯聚后的光斑尺寸如圖6所示。單面透鏡的匯聚能力有限,經過透鏡匯聚后的DFB芯片的光斑形狀仍為橢圓形,在光纖端面處x軸的光斑尺寸為13.50μm,y軸的光斑尺寸為11.72μm,光線匯聚后的入射角度x軸大約為4.46°,y軸大約為9.97°,而SMF的模場直徑為9.2μm,發散角約為8°,從模場和發散角兩方面匯聚光線和SMF都不相匹配,因而耦合效率最大為25.49%;因為x軸的光斑尺寸大于y軸光斑尺寸,所以在光纖偏移過程中,x方向的容忍度要大于y方向的容忍度;在x和y的角度旋轉中,因為y軸光線的匯聚角大于x軸的光線匯聚角,所以y方向的容忍度要大于x方向的容忍度。

Fig.6 Spot size after convergence
SMF在z軸方向的位置變化對耦合效率的影響如圖7所示。與x軸、y軸相比,z軸的容忍度要大于前兩者,z軸以下降耦合效率ηd,z為5%作為比較,得到容忍度Tz≈±30μm,z軸方向具有較大的容忍度,因此在蝶形器件的SMF封裝過程中,優先保證x軸、y軸方向的位置精度,其次考慮z軸的位移。

Fig.7 Influence of SMF position change in z-axis on coupling efficiency
2.2.2 透鏡5個自由度變化對耦合效率影響 非球聚焦透鏡x軸、y軸空間自由度變化對耦合效率的影響如圖8所示。同樣以耦合效率下降ηd=10%為比較,透鏡在x軸方向位移容忍度Ts,x≈±1.8μm,在y軸方向的位移容忍度Ts,y≈±1.1μm,x方向的位移容忍度大于y方向的位移容忍度;在角度偏移方向,x軸、y軸方向的角度偏移對耦合效率的影響要大于x軸、y軸的位移變化,其中x的角度容忍度Ta,x=±0.09°,y的角度容忍度Ta,y=±0.14°,x方向的角度容忍度小于y方向的角度容忍度。
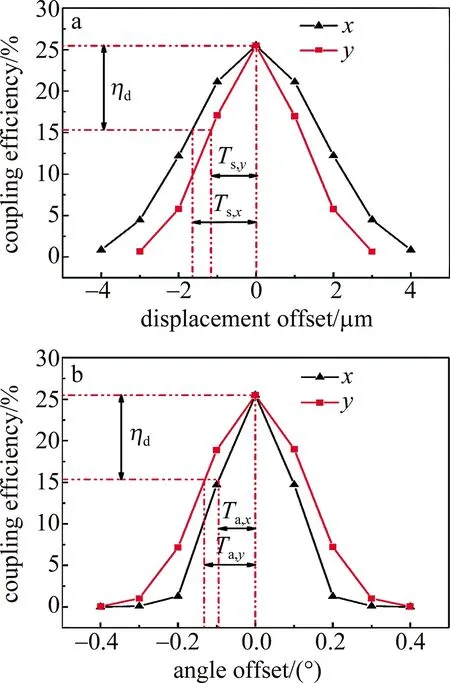
Fig.8 Influence of spatial position change of lens on the x-axis and y-axis on coupling efficiency
圖9為透鏡的位置變化對光斑位置的影響。從圖中可以看出,曲線的斜率約為2.3,即透鏡每移動1μm,光斑中心相對光纖中心移動距離約為2.3μm,同時x軸光斑中心偏移的距離略小于y軸的距離,因此在水平容忍度方面,x軸方向略大于y軸方向。在x軸、y軸角度旋轉方面,因為透鏡端面距離光纖端面為毫米級別,通過正切三角函數關系可知,當距離較長時,微小的角度變化將引起較大的位移,當透鏡變化角度為0.1°時,耦合效率將發生極大的變化。因此,相對于SMF來說,透鏡的水平位移容忍度和角度偏移容忍度更小,但是當透鏡的移動范圍仍能保證入射光線位于透鏡孔徑范圍內時,通過調整SMF的位置和角度,仍能確保系統耦合效率基本位于最大耦合效率處。

Fig.9 Influence of lens displacement on spot center position
透鏡z方向位置變化對耦合效率的影響如圖10所示。耦合效率曲線在最佳耦合點左右沒有呈現對稱的趨勢,在正方向,即透鏡遠離DFB方向的容忍度要大于負方向的容忍度,以耦合效率下降ηd,z=10%作為對比,正方向的容忍度約為31μm,為過焦現象,負方向的容忍度為20μm,為欠焦現象。從透鏡造成的過焦與欠焦現象對比,過焦效果要好于欠焦效果,此結論可以在器件的封裝中作為參考,減小器件的焊后偏移(post welding shift,PWS)。

Fig.10 Influence of lens position change in z-axis on coupling efficiency
實際焊接中,通常器件在進行焊接后會產生微量的橫向偏移和角度偏移,即經過焊接后,透鏡與SMF相比于原位置會產生少量的偏移和旋轉。當DFB芯片-透鏡-SMF三者的耦合效率達到最大時,首先對透鏡進行封裝,此時產生焊后偏移量為亞微米級別,然后將光纖再次進行耦合,此時會找到第1次耦合最大值,然后再次對光纖進行再次封裝,此時光纖同樣產生微量位移。同樣,如果首先對SMF進行封裝,然后再對透鏡進行封裝,最后透鏡也會產生微量位移,但是同樣位移透鏡最后位移距離對封裝功率影響更大。
3 實驗與討論
本文中采用的DBF芯片與SMF的通信中心波長為1310nm,數值孔徑與束腰參量如表1所示。dNA,∥表示水平方向的數值孔徑,dNA,⊥表示垂直方向的數值孔徑,w∥表示水平方向的束腰半徑,w⊥表示垂直方向的束腰半徑。結合仿真結果,在耦合平臺搭建時,在x方向、y方向,運動平臺選擇分辨率為0.1μm,z方向選擇的分辨率為0.1μm,角度方向選擇分辨率為0.1°,對耦合平臺進行設計,x方向和y方向的運動平臺選擇日本駿河生產的型號為KYC系列,重復定位精度0.3μm,z方向選擇型號為KXL系列,重復定位精度0.1μm。

Table 1 Selection parameters of chip and fiber
透鏡與SMF的空間位置變換對于模型最終的耦合效率影響很大,由仿真數據可知:在同樣的空間位置變化中,透鏡的容忍度要遠小于SMF的容忍度,于是,在封裝時,應當優先考慮容忍度小的元件,即先封裝透鏡,后封裝SMF。為驗證分析的準確性,下面分別對兩種封裝方式進行實驗對比,每組取15只實驗樣品,為保證結果的可靠性,經過篩選后,選出耦合功率范圍在1700μW~1800μW的各9只器件進行實驗,基本原理為:首先,DBF激光器插入蝶形管殼并且放置于底座,用管殼夾具固定住,右夾具夾持光纖,保持水平,z軸運動平臺保證光纖與DBF的軸向距離,x方向和y方向運動平臺保證SMF與DBF的橫向距離,x方向和y方向的角位移運動平臺保證SMF分別繞x軸、y軸旋轉,同理,上夾具夾持透鏡,具備5個自由度。通過智能算法讀取光功率,實時監控功率變化,尋找耦合效率最大值。將激光二極管插座和光纖尾端分別通過導線和探頭連入光功率計即可對耦合功率的變化情況進行實時監測。圖11中為所得實驗結果。其中,透鏡優先耦合與SMF優先耦合兩條曲線為對照實驗,可觀察得出耦合順序的影響可忽略不計。可觀察到,優先封裝透鏡最大功率可達到1800μW,而優先封裝SMF最大功率僅為1200μW,并且在每組樣品中,優先封裝透鏡所得的功率均大于優先封裝SMF所得的功率。實驗結果表明:在耦合功率相差不大的情況下,兩種封裝步驟比較來看,先對透鏡進行封裝其焊后偏移的效果要好于先對SMF進行封裝。圖11所示數據中,先進行透鏡封裝或先進行SMF得到的功率都有過于偏小的數據,這有可能是焊槍能量不均勻而產生的PWS偏大,屬于偶然因素,在排除偶然性以后,結果可以用來預測兩種封裝的優劣。

Fig.11 Comparison of power results of two packaging methods
焊接透鏡光纖元件時,焊后偏移導致的對準畸變是一個嚴重的問題,它對封裝成品率有很大的影響。有學者研究了蝶形激光二極管封裝過程中焊接引起的對準畸變,研究表明,適當的封裝焊接順序可以將對準畸變降低93%[22]。所以,綜合仿真結果和實驗結果分析,在含有透鏡的蝶形光通信激光器進行封裝時,應當首先對透鏡進行封裝,然后將光纖再次進行耦合,此時會找到第1次耦合最大值,然后再次對光纖進行再次封裝。根據已有文獻[22]中對蝶形激光器封裝的PWS的研究可知,越靠近發光芯片的位置,PWS程度越嚴重,所以,相較于SMF,透鏡離芯片的距離更近,易產生較大的焊后偏移。優先進行透鏡封裝時,對于其產生的焊后偏移還有機會通過調整SMF的位置和角度而得到改善。并且,光纖在水平面范圍的焊后偏移量相對縱向范圍較小[23-24],在一定范圍內,具有可調節空間,便于調整修正透鏡封裝殘留的焊后偏移。所以,先進行透鏡封裝的器件具有一定的優勢。
4 結 論
建立了激光器芯片-透鏡-SMF仿真模型,通過仿真對蝶形光通信激光器的耦合規律進行了深入的研究。分別從SMF、透鏡的5個自由度進行容忍度分析,并對仿真推導出的耦合封裝工藝,進行了實驗驗證。
(1)在DBF芯片與SMF之間加入非球透鏡,模型耦合效率達到了25.49%。耦合系統中SMF的z方向的容忍度遠大于x方向、y方向的容忍度,x方向和y方向的位移容忍度為Ts,x>Ts,y,角度容忍度為Ta,y>Ta,x,因此,在對SMF進行耦合封裝操作時,應優先保證x方向和y方向的位置精度。
(2)透鏡x方向、y方向的位移容忍度為Ts,x>Ts,y,角度容忍度為Ta,y>Ta,x。z方向的容忍度最大,產生了過焦與欠焦現象,并且過焦的容忍度要大于欠焦的容忍度,封裝過程,應當避免欠焦情況發生。
(3)相對于SMF來說,透鏡的水平位移容忍度和角度偏移容忍度更小,但是當透鏡的移動范圍仍能保證入射光線位于透鏡孔徑范圍內時,通過調整SMF的位置和角度,仍能確保系統耦合效率基本位于最大耦合效率處,所以,應當先封裝透鏡,在封裝光纖。
(4)當DFB芯片-透鏡-SMF三者的耦合效率達到最大時,首先對透鏡進行封裝,然后調整光纖的位置與角度,改善透鏡封裝的偏移,最后,再對光纖進行封裝。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05