基于隨機森林的復合導引頭跟蹤模式決策
2021-11-06 02:25:44夏曉雷張通彤姜湖海
激光技術 2021年6期
關鍵詞:模型
夏曉雷,張通彤,周 通,姜湖海,吳 輝
(1.海軍裝備部,成都 610100;2.西南技術物理研究所,成都 610041)
引 言
導引頭是制導導彈的重要組成部分,作為核心分系統之一,在精確制導過程中完成對目標的探測、目標分類識別、目標跟蹤、干擾對抗等功能,為導彈武器系統實現目標的捕獲、跟蹤、精確打擊提供決策依據[1-7]。傳統的單一模式制導導引頭有電視導引頭、紅外導引頭、激光導引頭、雷達導引頭[8],復合制導則是根據各類單一制導模式按作戰需求組合而成兩種及以上的制導模式。在多模復合制導中,各探測器將實時對目標進行檢測,同時將跟蹤的目標信息傳輸到綜合控制系統,此時綜合控制系統將會得到兩種及以上的目標狀態信息,通過對輸入的目標信息進行處理得到唯一的目標信息,其過程即是信息融合的過程[9-12]。
目前對多模信息融合處理,實現跟蹤模式決策主要采用的是根據各探測器對目標工作狀態為捕獲(含捕獲成功、捕獲異常)、跟蹤(含跟蹤穩定、跟蹤不穩定、跟蹤記憶、跟蹤丟失)的排列組合條件。流程決策目前使用流程分支設計方法,決策策略受人為思維限制,排列組合條件有限,且條件選擇受主觀因素影響太多,當出現更多條件時可能會出現誤判的情況,同時也面臨著制導模式增多、作戰使用復雜的情景下代碼分支龐大和通用性差的缺陷,從軟件和硬件的層面都對設計帶來了不便。
作者針對目前算法的不足之處,提出利用隨機森林算法和誤差補償結合的方法對復合制導的跟蹤模式決策流程進行優化的思路,將傳統的條件組合判讀流程用人工智能模型替代,依據外場試驗得到大量樣本數據,用樣本基于隨機森林算法訓練跟蹤模式決策模型,對于模型分類錯誤的樣本數據,提取數據特征,采用人工判讀的方式進行誤差補償,使得提出的方法在保證決策正確率的前提下,簡化人工判讀流程代碼量,提升運行速度,同時在復雜條件下使決策策略更智能,適應性更強。
1 復合導引頭工作原理
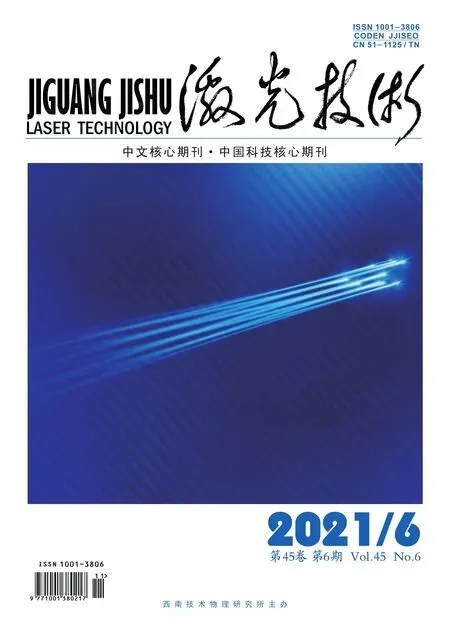
作者基于典型的激光/雷達/紅外多模復合制導導引頭進行研究,目標的測量數據主要來源于紅外探測器、半主動激光探測器、主動毫米波探測器[13-14]。在實際應用中根據彈上工作模式指令確定復合模式,包括:紅外/激光復合、雷達/激光復合、紅外/雷達復合、紅外/激光/雷達復合。在各復合模式中會根據彈目距離分時分段讓各探測器工作。具備激光引導條件時,會先使用激光源照射目標,當導引頭接收到激光回波后,對目標進行捕獲,實現目標的遠距離導引,為雷達和紅外提供初始指向,在到達相應的可探測距離便分時啟動雷達和紅外工作,快速對目標進行捕獲跟蹤。系統原理框圖如圖1所示。
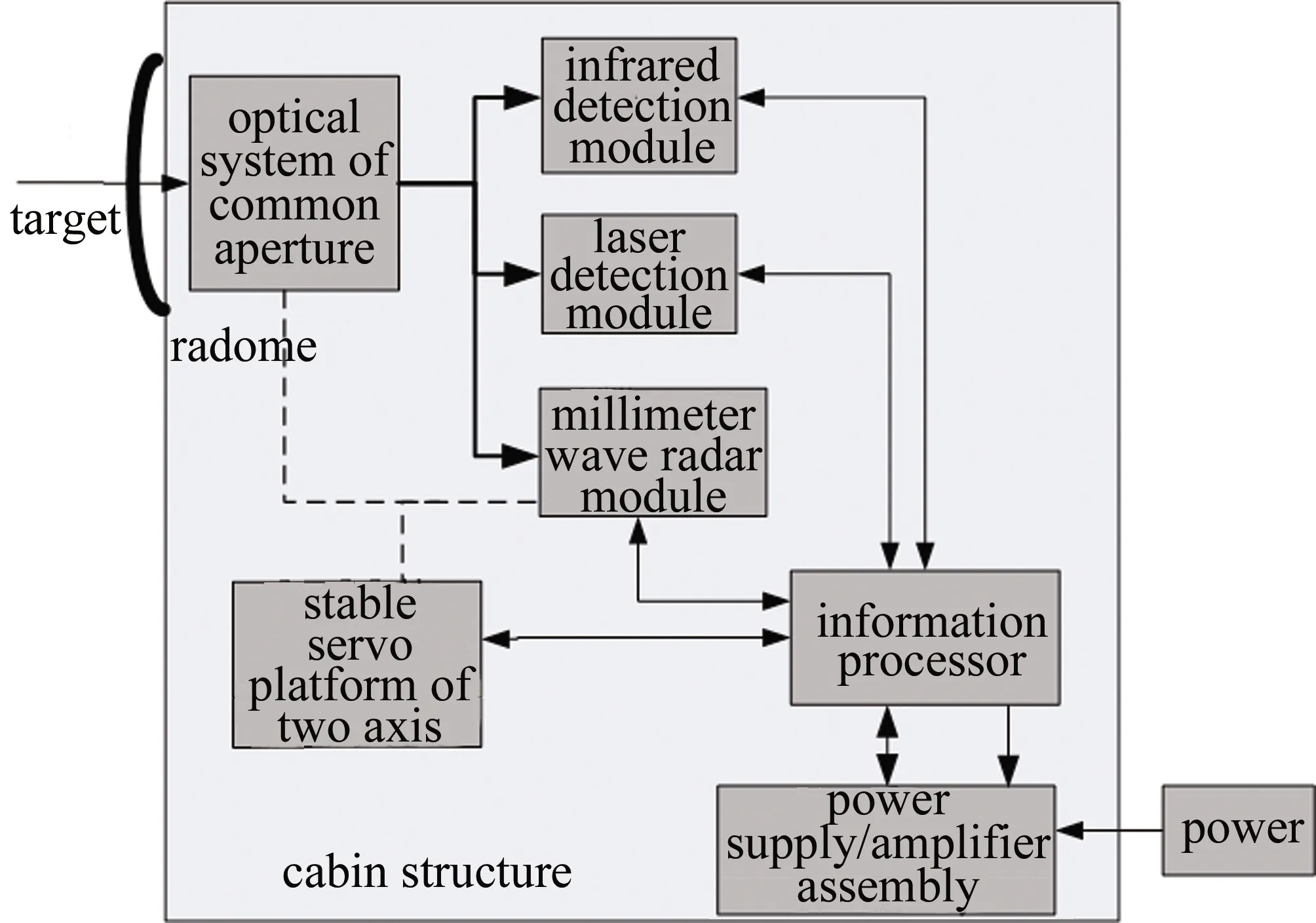
Fig.1 Block diagram of seeker working principle
當有兩模或三模同時工作時,各探測器會根據內部算法解算出彈目相對運動的變化,以跟蹤偏差的形式上報綜合控制器,綜合控制器根據各探測器上報的目標偏差(包括偏航偏差和俯仰偏差)、置信度、穩定性等目標信息綜合判斷探測器跟蹤目標信息可靠性,用可靠性高的探測器解算的跟蹤偏差完成伺服閉環,實現對目標的穩定跟蹤。復合制導簡化流程如圖2所示,其中DIR是紅外開啟工作彈目距離。影響控制器閉環決策的主要因素包括:彈目距離、各子系統跟蹤目標偏差、置信度。利用這些信息,綜合控制器便可以判斷哪個探測器對目標跟蹤更穩定,以便做出伺服決策,同時上報制導信息。
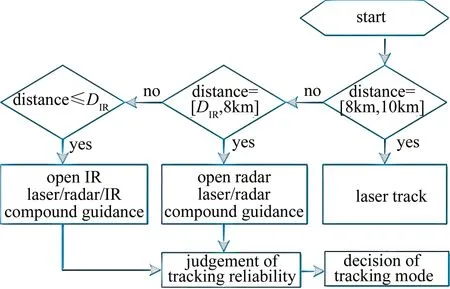
Fig.2 Simplified flow chart of compound guidance
2 跟蹤模式決策
在制導武器作戰過程中,導引頭探測器探測到目標的跟蹤偏差等信息輸入到綜合控制系統,綜合控制器系統用探測器測得的偏差信息進行閉環,并驅動電機,控制導引頭始終指向目標的方向。在復合制導導引頭中,由于存在多個探測器探測到的目標信息,跟蹤模式決策就是綜合控制系統根據輸入的不同探測器跟蹤目標信息經過內部的判定條件輸出唯一更可靠的目標信息。跟蹤模式是最終的閉環模式,即輸出的唯一目標信息來自于哪種探測器便是哪種跟蹤模式,例如,若是決策出紅外探測器跟蹤信息更可靠,便是紅外跟蹤模式,紅外探測器測得的目標偏差信息將用于完成導引頭穩定平臺伺服閉環,對目標進行穩定跟蹤,實現對目標的精確打擊,提高目標的命中概率。
作者提出基于隨機森林算法對跟蹤模式決策流程進行優化,用探測器、慣導測得的目標信息對跟蹤模式決策過程建模,得到跟蹤模式決策器,當有新的目標信息輸入時,該決策器自動判別出跟蹤模式,綜合控制系統將會用此模式進行閉環。實現步驟如圖3所示。

Fig.3 The modeling process of tracking mode classifier
(1)數據預處理。可用數據包括各探測器跟蹤的目標信息、慣導測得目標信息,通過對數據相關預處理操作得到包含屬性和目標變量的樣本數據集;(2)模型構建:將樣本數據集劃分為訓練集和測試集,基于隨機森林算法,用訓練集訓練模型,得到跟蹤模式決策模型;(3)模型評估:將測試集輸入決策模型,采用分類模型評價指標,對模型的分類準確率進行評估。
3 建立基于隨機森林算法的跟蹤模式決策模型
3.1 隨機森林決策流程
隨機森林是一種利用集成學習思想的機器學習算法,主要用于分類和回歸任務場景,它由多個決策樹組成,各個決策樹的決策過程及結果相互獨立,并由融合策略輸出最終預測結果。集成學習是通過構建并結合多個學習器來完成學習任務,其思想是先產生一組“個體學習器”,再用某種策略將它們結合起來。隨機森林的“個體學習器”即是決策樹,決策樹是一種常用的樹結構機器學習方法,決策樹的決策結果經某種策略融合后輸出的最終預測結果即是隨機森林的決策結果[15-20]。使用隨機森林對樣本大小為V的訓練集建立模型,包括3個步驟:(1)設定決策樹模型的個數N,利用bootstrap方法從訓練集隨機有放回抽樣,得到N個大小為V的訓練集;(2)利用決策樹訓練步驟(1)的訓練集,得到T個決策樹模型,該步驟包括3個重要參量,即決策樹使用特征的最大數量、決策樹的最大深度、決策樹內部節點被劃分時所需最小樣本數;(3)根據具體的融合策略組合所有決策樹的輸出,得到最終預測結果。
以上步驟中涉及的參量根據交叉驗證方法調優設置。
本文中基于隨機森林對導引頭跟蹤模式決策的流程如圖4所示。

Fig.4 Decision flow of optimization strategy
通過對系統輸入的bootstrap采樣構造不同分布的訓練集,進而建立N個基決策器(N≥1),每個基決策器能獨立執行跟蹤模式的判別,最后通過決策融合形成終決策器,輸出跟蹤模式。
3.2 基決策器原理及實現方法
基決策器采用決策樹算法實現,其對跟蹤模式的判別可表示為:f(X)→Y,Y的取值為{1,2,3},分別代表激光、雷達、紅外(infrared,IR)3種跟蹤模式,X是一個n維向量,表示系統輸入。圖5為某個基決策器的執行流程。
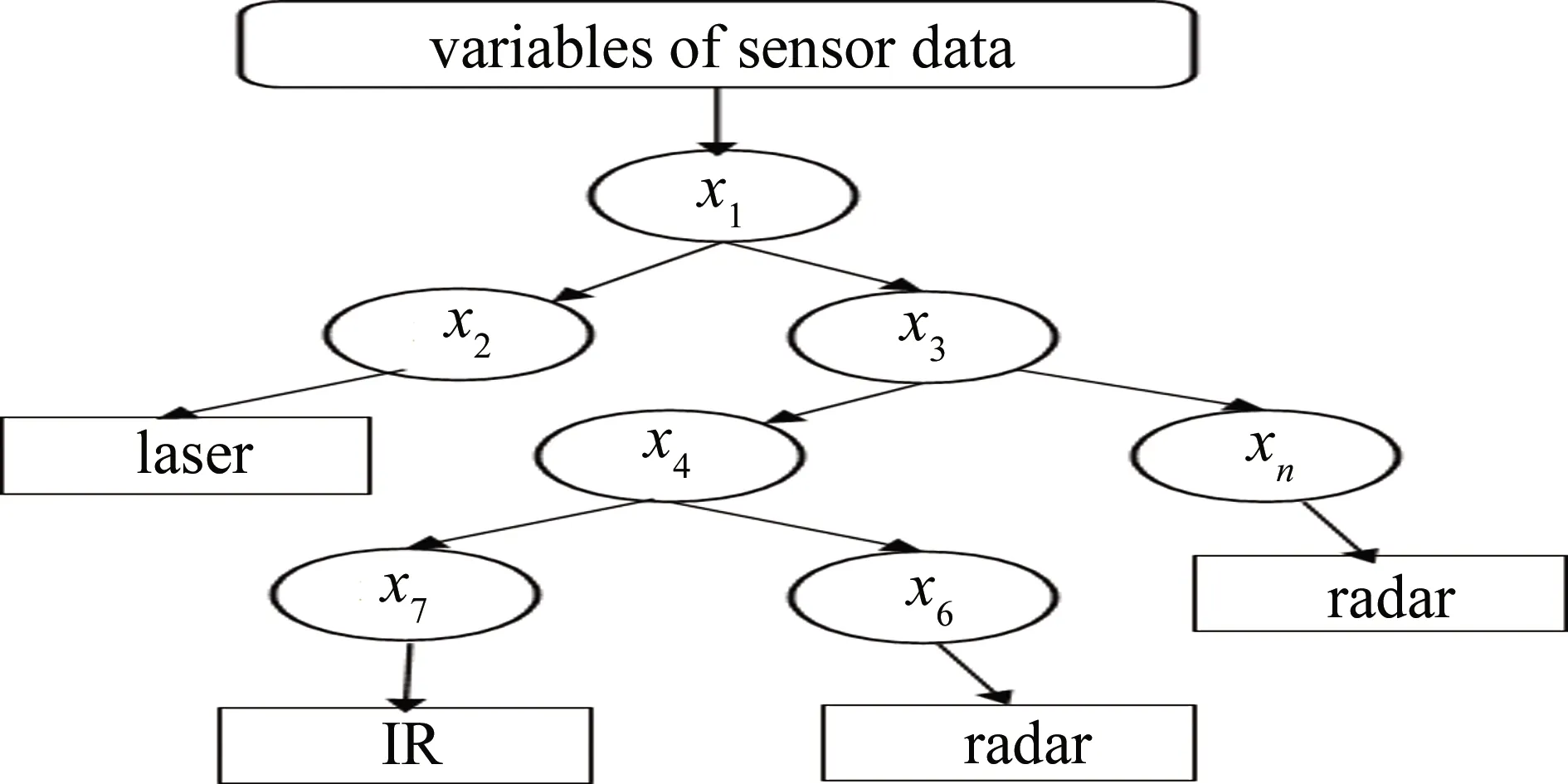
Fig.5 Execution path of base decision maker
圖中,xn代表X的某一個維度輸入。每個基決策器由若干條(不小于1)決策路徑構成,1條決策路徑由若干(不小于1)決策節點和決策結果構成,圖5中的基決策器包含4條決策路徑,例如:[x1,x3,x4,x7,IR]為1條決策路徑。決策路徑是有執行順序的,兩條決策路徑要相同當且僅當它們的決策節點、決策結果、執行順序完全相同。同理,兩個基決策器相同當且僅當它們所有決策路徑相同。
3.3 決策融合
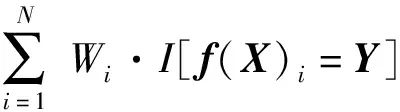
決策融合的本質是對N個基決策器的輸出結果進行整合,得到最終的隨機森林決策器,基于3個原因:(1)不同基決策器的質量是不相同的,質量越高的決策器,在不同場景下對跟蹤模式的決策輸出越穩定;(2)每個決策器有它最擅長的工作場景;(3)實驗證明融合后的決策器相比單棵決策樹分類器有更加穩定可靠的決策結果。采用對基決策器加權融合的思想,權重越大的基決策器,最終決策的話語權越高。設Wi和f(X)i分別為第i個基決策器的權重及決策輸出,F(X)為最終跟蹤模式輸出,則:
(1)
3.4 決策器質量的評價指標
評價指標用來衡量決策器質量的好壞,同時也是實驗結果的主要參考。選取真實的導引頭工作數據作為驗證數據,其中X由10個量組成,分別是:激光方位跟蹤偏差Lx、激光俯仰跟蹤偏差Ly、激光跟蹤目標置信度Lp、雷達方位跟蹤偏差Rx、雷達俯仰跟蹤偏差Ry、雷達跟蹤目標置信度Rp、紅外方位跟蹤偏差Ix、紅外俯仰跟蹤偏差Iy、紅外跟蹤目標置信度Ip、彈目距離D。表1中為N條驗證數據。
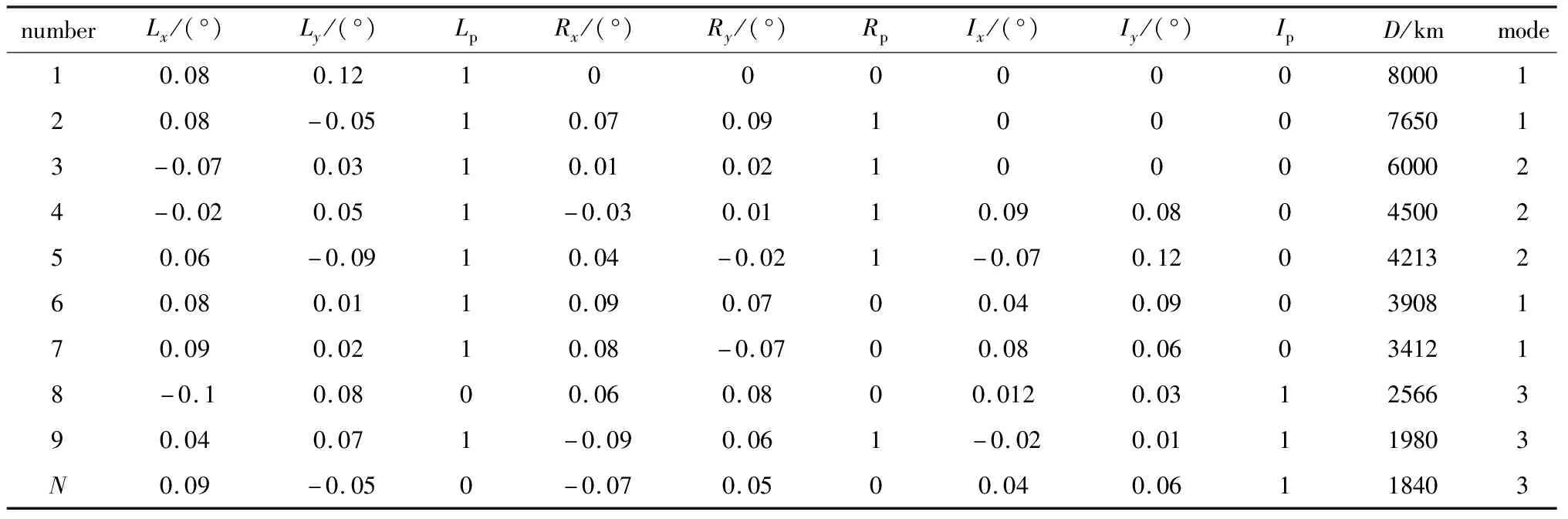
Table 1 Data set of input and output
決策器可以輸出3種模式:紅外、激光、雷達。以下以激光模式的決策為例,演示決策器在該模式下如何評價。
設X為輸入數據,Y為決策器的輸出(即模式的選擇),將Y的取值合并為兩種{激光和非激光(指紅外和雷達)},同理將用于驗證的模式取值也合并為兩種。驗證值和決策值的不同組合構成見表2。

Table 2 Validation value and decision value
表2中,TP(true positive)為正確分類的正例,FP(false positive)為錯誤分類的正例,TN(traue negative)為正確分類的負例,FN(false negative)為錯誤分類的負例,它們分別表示每條輸入數據對應的驗證結果的取值范圍。例如TP表示決策器輸出激光模式,驗證值也是激光模式,這是一次正確的決策;同理,TN也表示決策正確,相反,FP和FN表示決策錯誤。
采用3個指標評價決策器質量,分別為:
(2)
(3)
(4)
式中,P為查準率,R為查全率,F為決策器在當前跟蹤模式上關于查準率和查全率的綜合表現。
用同樣的方法求得決策器分別在紅外、雷達模式下的綜合表現,求出決策器在{紅外、激光、雷達}3種模式下的綜合評價指標為:
(5)
式中,|MY|表示N條驗證數據中模式Y出現的次數,Y取值{1,2,3},FY表示Y模式下F評估指標。E越大,則決策器的綜合性能越好。
4 仿真及結果分析
4.1 決策器精度對比
基于傳統流程是類樹的條件判讀過程,在仿真分析中,分別采用決策樹和隨機森林算法對傳統決策過程建模,得到跟蹤模式決策器,其仿真結果如表3和表4所示。

Table 3 The simulaton result based on random forest
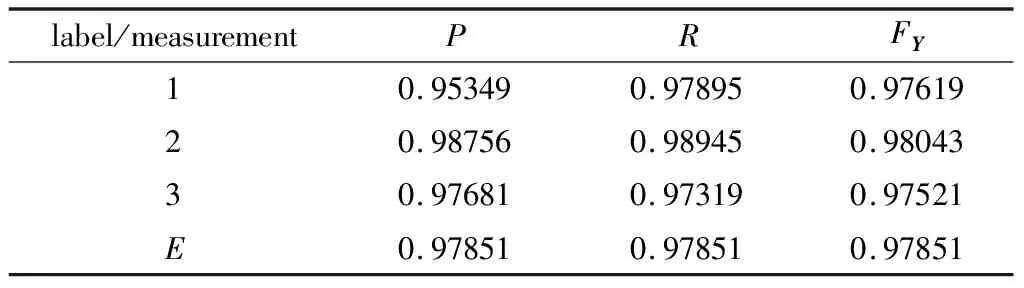
Table 4 The simulaton result based on decision tree
由表3、表4中的實驗數據可知,基于隨機森林對傳統決策過程建模,精度達到0.99805,基于單決策樹建模,精度為0.97851,具有極高的精度和穩定性。由仿真結果對比可知,對于多模跟蹤模式決策而言,隨機森林算法模型分類準確率優于決策樹算法模型。
4.2 決策器穩定性對比
模型穩定性是衡量模型在不同場景下適應性強弱的重要指標,采用不同采樣方法制備多個驗證數據集,使它們的數據量大小和分布均不相同,分別采用決策樹和隨機森林算法對傳統決策過程建模,得到的決策器評價指標E的曲線對比圖,如圖6所示。
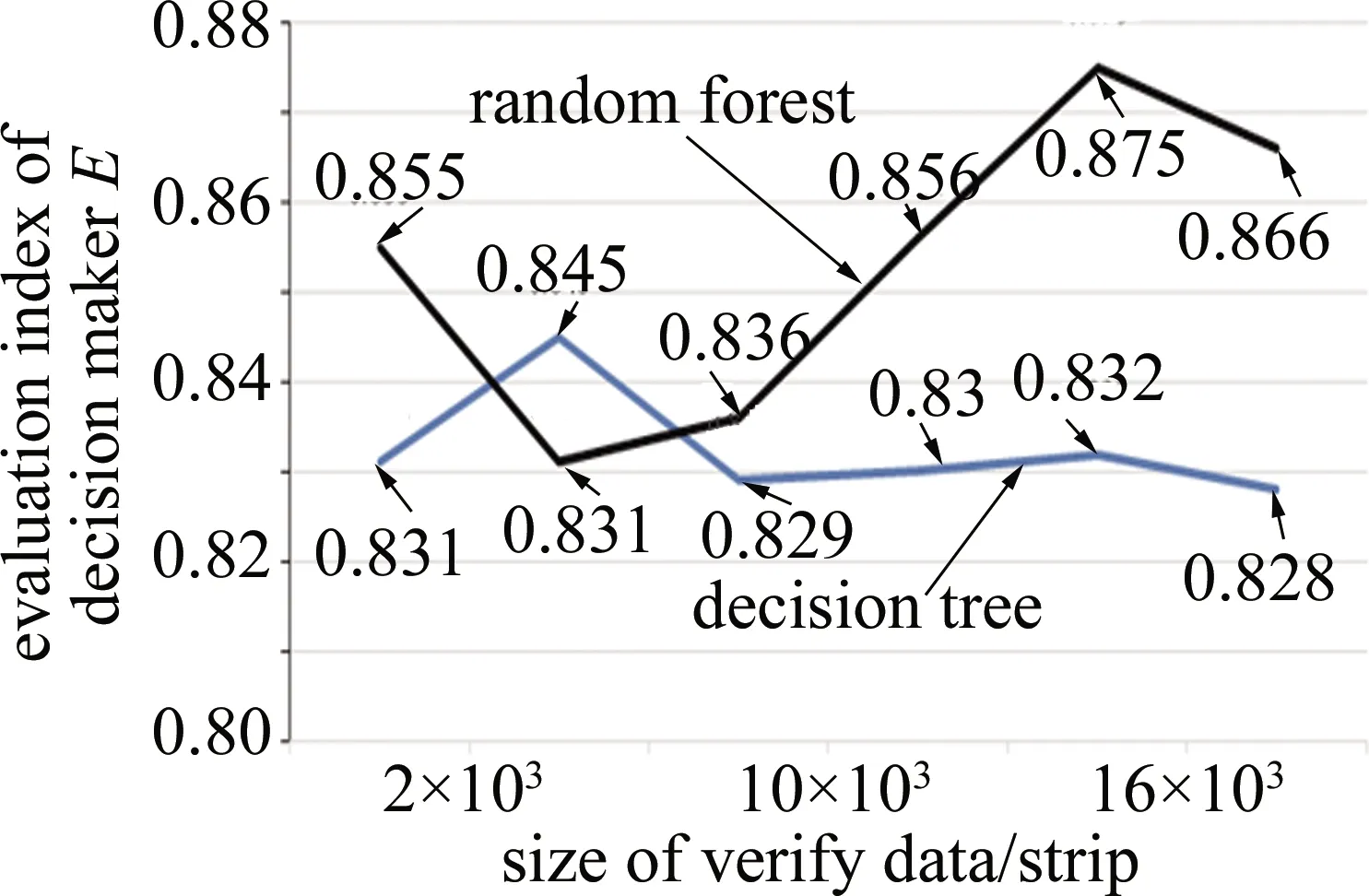
Fig.6 Comparison of evaluation indicators of two models with different sample sizes
由圖可知,采用隨機森林算法決策在多數場景下比單決策樹算法的性能高(6種場景下,有5種高于決策樹),該結果表明,隨機森林算法在復雜的應用場景下輸出的決策結果更可靠,適應性更強。
4.3 決策器誤差補償
由模型精度和穩定性對比結果可知,盡管采用隨機森林建模精度達0.99805,無限逼近于1(理想情況是用隨機森林算法構建的決策模型能夠完全復刻傳統流程的判斷結果),但依然存在決策誤判的情況,抽取其中1200條驗證樣本數據進行分析,得到隨機森林決策器跟蹤模式決策結果分布圖,如圖7所示。
Fig.7 Distribution of decision results about tracking mode without error compensation
由圖可知,用隨機森林方法得到的跟蹤模式誤判的情況為1200例數據中錯誤6例,其中,紅外錯誤2例,激光錯誤2例,雷達錯誤2例。
針對模型存在誤判的情況,提取判別錯誤的樣本數據,采用異常檢測、相關性分析等手段進一步分析,提取出決策器的誤判路徑,并采用條件判讀的方式進行誤差補償,得到隨機森林結合誤差補償的跟蹤模式決策結果,如圖8所示。
Fig.8 Distribution of decision results about tracking mode with error compensation
由圖可知,用隨機森林結合誤差補償的方法對跟蹤模式的識別正確率達到100%。
4.4 決策器運行效率對比
在保證本文中提出的方法對跟蹤模式分類的正確率的前提下,對本文中的方法和傳統的方法在模式決策上的耗時進行了對比,結果如圖9所示。由圖可知,本文中方法的決策速度提升約為16%。
Fig.9 Comparison chart of decision time-comsuming
4.5 決策器的工程實現代碼量對比
對傳統方法和本文中方法的實現代碼量(決策流程的邏輯)進行了對比,其結果如圖10所示。
由圖可知,在應用程序代碼實現過程中,本文中方法150行便實現跟蹤模式決策,替換原上千行的流程判讀代碼,大大簡化代碼量。
Fig.10 The comparion chart of code size of decision process
5 結 論
基于隨機森林算法對跟蹤模式決策過程建模并結合誤差補償的方法,保證了決策準確率的前提下,對傳統的條件判讀決策流程進行優化,實現了跟蹤模式的自主決策。首先,基于傳統判讀流程的特點,隨機森林模型和決策樹模型都可適用,隨機森林采用訓練多棵決策樹的模式,使分類錯誤的樣本在下一次訓練中得到更多關注,通過加權組合的方式訓練決策模型,提高決策的準確率,使決策準確率無限接近1,再用誤差補償的方式修正錯誤率;其次,隨機森林網絡模型對傳統流程進行封裝,輸入探測器樣本數據后自動決策出跟蹤模式,簡化代碼分支量,提升運行速度,封裝后的代碼量僅是傳統流程代碼量的1/3,跟蹤模式的決策速度相比傳統流程提升16%;除此之外,在面臨更復雜的場景時,無需增加代碼量,只需提供更多訓練數據,更新決策模型,便能夠準確地預測復雜邏輯下探測器的跟蹤有效性,減小漏判和誤判的概率,提高系統復雜邏輯的容錯性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19