工業機器人功率等效模型與參數辨識
2021-11-09 06:55:54吳勇強唐先智陳元杰
重慶大學學報 2021年10期
吳勇強,唐先智,宋 偉,江 沛,周 進,陳元杰
(1.重慶大學 機械工程學院,重慶 400044;2.中國石油西南油氣田分公司重慶氣礦,重慶400021)
工業機器人是智能制造系統的關鍵裝備,也是數字化車間的重要構成部分。中國工業機器人量大面廣,其負載遠遠小于工業機器人本體質量,且在運行過程中由于頻繁進行加減速,導致工業機器人能效較低。而隨著近年來能源成本的上升,如何提升工業機器人能效,降低工業機器人能耗成本,逐漸成為各界關注的焦點。
許多學者通過優化機器人運動軌跡的方式降低機器人能耗。文獻[1-2]使用比例因子對機器人的運動時間進行縮放,調整機器人的運動速度。Pellicciari等[3]在重要的2個軌跡節點之間插入多個虛擬控制點,使用3次樣條或5次樣條曲線對這些點進行插值構成運動軌跡。文獻[4-5]使用B樣條曲線在機器人的關節空間進行軌跡規劃,通過粒子群算法優化B樣條曲線的控制點,使得機器人的整體能耗最低,并展示了良好的實驗效果。文獻[6-7]也使用B樣條曲線規劃機器人軌跡,不過優化參數為軌跡中間節點之間的時間間隔。
以上方法均基于工業機器人功率模型進行能耗優化,但功率模型較為復雜,其中大量電機參數難以直接獲取,實驗辨識結果準確性較低。文獻[8]使用扭矩的平方作為目標函數衡量機器人的功率,Riazi等[9]使用偽功率代替機器人的實際功率。此外,Hong等[10]對比了幾種不同的目標函數,包括摩擦損耗、電機能耗和扭矩的平方等。以上眾多的目標函數中,加速度的平方和、偽功率、扭矩的平方和及機械能都不能正確、全面地反映機器人系統的總功率,因而最終的優化結果并不一定理想。
針對以上問題,筆者在對機器人系統永磁同步電機、伺服驅動器功能部件的能耗分析的基礎上,提出了工業機器人功率等效模型。該模型通過高階多項式建立起機器人損耗功率與電機扭矩、電機角速度的映射關系。在獲取機器人運動過程中的扭矩和關節角等數據后,通過最小二乘法求解功率損耗模型中的系數。
1 工業機器人系統建模
工業機器人是典型的機電一體化系統,由機械元件、伺服電機、驅動系統和外圍部件組成。為了準確估計機器人的實時功率,有必要對每個元件的功耗特性進行詳細分析。如圖1所示,整流器把電網供來的三相交流電轉化為直流電,直流電通過直流總線供給逆變器,逆變器再根據控制規律把直流電轉化為特定幅值和特定頻率的交流電,用于驅動伺服電機,伺服電機通過減速器后帶動機器人關節做旋轉運動。在直流總線上,接了一個電容和制動電阻,其作用是讓直流總線的電壓保持在一定范圍內,防止電壓過高危及電路的安全。下面將詳細介紹各部分的功耗特性。

圖1 機器人電氣系統Fig. 1 Robot electrical system
1.1 機械元件

(1)

關節摩擦力可以用簡單的線性模型來計算,由庫倫摩擦和黏滯摩擦兩項組成,表達式為
(2)
式中:FV是黏滯系數;FS是庫倫摩擦系數。
由于電機的輸出軸轉速較高、力矩較小,通常需要減速器來匹配實際的工況需求。因此,電機扭矩和轉速可以表示為
(3)
(4)

電機輸出的有效功率可以表示為
(5)
式中Pmec代表電機輸出端的有效功率,它包括了在機器人關節由減速器引起的摩擦損失和傳遞到連桿端的機械能。
使用式(1)計算機器人關節扭矩,會涉及連桿的動力學參數,如連桿質量、質心和轉動慣量,這些參數可以通過文獻[12-15]的方法來獲取。
1.2 伺服電機
工業機器人軌跡復雜多變,關節電機處于頻繁啟動和制動中,伴隨著機器人不停地加速和減速。永磁同步電機擁有優越的調速性能,且結構簡單、效率高、轉動慣量小,廣泛應用于工業機器人中[16]。
為了對永磁同步伺服電機的工作原理進行有效描述,通常把電機放在靜止的三相(a/b/c軸)坐標系、靜止的兩相(α/β軸)坐標系或動態的兩相(d/q軸)坐標系中進行分析。根據Park的理論,把永磁同步電機的三相電路分解到d/q兩軸上,若分解過程按照幅值不變的原則,永磁同步電機的輸出扭矩可以表示為[17]
(6)
式中:τm為電機扭矩;p為電機的極對數;ψf為轉子永磁體磁鏈;iq為q軸電流;id為d軸電流;Ld為定子繞組直軸電感;Lq為定子繞組交軸電感。
永磁同步伺服電機矢量控制的策略主要有4種[18],d軸電樞電流id=0的控制、功率因數等于1的控制、恒定磁鏈的控制和最大力矩電流比的控制。其中,直軸電流為0的控制稱為磁場定向控制,控制方法簡單、計算量小,廣泛應用于工業場合。當d軸電流為0時,電機扭矩的表達式為
τm=kti,
(7)
永磁同步電機消耗的總功率為有效功率和損耗兩部分之和
Pm=Pmec+Pm,loss,
(8)
式中:Pm代表電機總功率;Pm,loss代表電機損耗功率。
電機的損耗可以分為以下幾個部分[5]:
1)定子繞組的銅損。這是電流通過繞組時產生的損耗,轉化為焦耳熱的形式散發出去,與繞組中電流的平方成正比。
2)鐵損。這是因為交變電流的作用,磁路中的磁通在鐵磁材料中交變產生的損耗,包括磁滯損耗和渦流損耗兩部分,假設與電機角速度成正比。
3)附加損耗。代表了多方面的損耗,難以及精確計算且占比很小,忽略不計。
綜上所述,只考慮的銅損和鐵損,電機的損耗為
(9)
式中:R表示定子繞組的電阻;kFe代表鐵損系數。
電機總功率可以表示為
(10)
1.3 驅動系統
驅動系統由3部分組成,分別是整理器、直流總線和逆變器,如圖1所示。驅動系統存在兩種工作狀態,分別對應工業機器人加速和減速兩種工況。
當機器人加速運動時,關節電機處于電動機工作模式,需要從外界吸收電能。電網中的電能依次通過整流器、直流總線及逆變器輸送到電機。
當機器人減速運動時,關節電機處于發電機的工作模式,向外界反饋能量。一般情況下,由于整流器的電路結構不允許電流反向流動,電機產生的能量不能反向輸送到電網。這時,再生電能經過逆變器,到達直流總線后存儲在電容上,導致總線電壓升高。如果直流總線電壓達到上限值,就會觸發制動電阻的開關導通,電流通過電阻產生焦耳熱,散失在空氣中,使得總線上的電壓保持在一定范圍內。
1)逆變器。永磁同步電機的運行效率非常高,一般在90%以上,其損耗和逆變器處于同一個數量級,因此對逆變器的損耗進行建模就顯得非常必要。逆變器的損耗分為以下幾個部分[3]:
a.恒定損耗。這部分損耗與負載無關,其大小是一個恒定的常數。
b.導通損耗。這是功率開關導通時的損耗,其大小與導通壓降、器件電流有關,假設正比于電流的平方。
c.開關損耗。在逆變器的工作過程中,開關管在不斷地打開與關閉,假設這部分的損耗正比于電流。
因此,逆變器的總損耗為
Pinv,loss=Pinv,const+kswi+kconi2,
(11)
式中:Pinv,loss為逆變器的損耗總功率;Pinv,const為逆變器的恒定損耗功率;ksw為逆變器的開關損耗系數;kcon為導通損耗系數。
逆變器總功率為電機的功率與逆變器損耗之和
Pinv=Pm+Pinv,loss=Pm+Pinv,const+kswi+kconi2。
(12)
2)直流總線。如圖1所示,所有逆變器都連接在直流總線上,因此逆變器之間可以進行能量交換。若某個軸的電機處于減速狀態并向直流總線反饋能量,恰好另一個軸處于加速狀態且從總線吸收能量,則處于減速狀態的電機反饋的電能直接流向正在加速的電機。
一般情況下,直流總線上的電容都非常小,存儲的電能非常有限,可以忽略不計[5]。假設處于加速狀態的電機的功率為正,處于減速狀態的電機功率為負。若所有電機的功率之和大于0,直流總線從整流器吸收電能,此時總線功率為所有逆變器功率之和。若所有電機的功率之和小于0,則認為這些再生電能全部被直流總線上的制動電阻消耗了,此時總線從整流器吸收電能的功率為0。
(13)
式中:PDC為直流總線的從整流器吸收電能的功率;Pinv,all是所有逆變器的功率之和。
3)整流器。假設整流器是理想的三相全波整流,其損耗非常小,可忽略不計[4]。因此,整流器的總功率為
Prec=PDC。
(14)
1.4 機器人總能耗
工業機器人系統中,除了考慮電機與伺服驅動器消耗的電能外,示教器、散熱風扇等也需要供電,這部分功率是固定的。綜上所述,機器人的總功率和總能耗表示為
Probot=Prec+Pconst,
(15)

(16)
式中:Probot為工業機器人的總功率;Pconst為外圍設備的恒定功率;Erobot為機器人一個運動周期的總能耗。機器人外圍設備的功率可通過待機測試獲取。
2 工業機器人損耗分析
2.1 工業機器人損耗模型
工業機器人系統中的每種元件都有自己的功耗特性,文中第1部分已經把所有元件的損耗和電機電流、電機角速度聯系起來,闡述了機器人系統總功率的計算方法。結合式(10)(12),機器人每個軸的逆變器功率可以表示為
(17)
把式(7)代入可得
(18)
把式(18)中的最后一項移到左邊可以得到
(19)
或者表示為
(20)

若對驅動系統中所有逆變器的總損耗進行計算,其表達式為
(21)

由此,機器人的總功率可以表示為
(22)
2.2 基于最小二乘法的損耗系數辨識
式(21)計算了伺服驅動的總損耗,是估計工業機器人總功率必不可少的環節,式中系數繁多,需要通過實驗對未知參數進行辨識,這里采用最小二乘法作為式(21)中系數的辨識算法。
由式(22)可知,當已知機器人的關節運動和總功率時,其總損耗可以表示為
(23)
式(21)可以改寫為
Ab=c,
(24)
式中:
b=[kk1,2k1,3k1,4…kn,2kn,3kn,4]T,
c=[P(t1(,P(t2(,…,P(tu(]T。
若機器人運動過程中采集的數據組數遠遠大于損耗系數的個數,矩陣A是滿秩矩陣,滿足最小二乘法的使用條件,損耗系數的解為
b=(ATA(-1ATc。
(25)
3 工業機器人功率參數辨識實驗
本節中主要描述工業機器人損耗參數辨識的實驗過程,包括機器人實驗軌跡設計、數據采集及使用最小二乘法辨識參數,并開展相應的驗證實驗(基于辨識結果預測機器人的實時功率和總能耗)。實驗設備是KUKA KR60-3機器人。
3.1 實驗設計
KUKA KR60-3工業機器人,如圖2所示(圖中單位為mm),是一個負載60 kg的六自由度工業機器人。表1給出了該機器人的DH參數,表2給出了相關的運動限制條件。

圖2 KUKA KR60-3機器人Fig. 2 KUKA KR60-3 robot
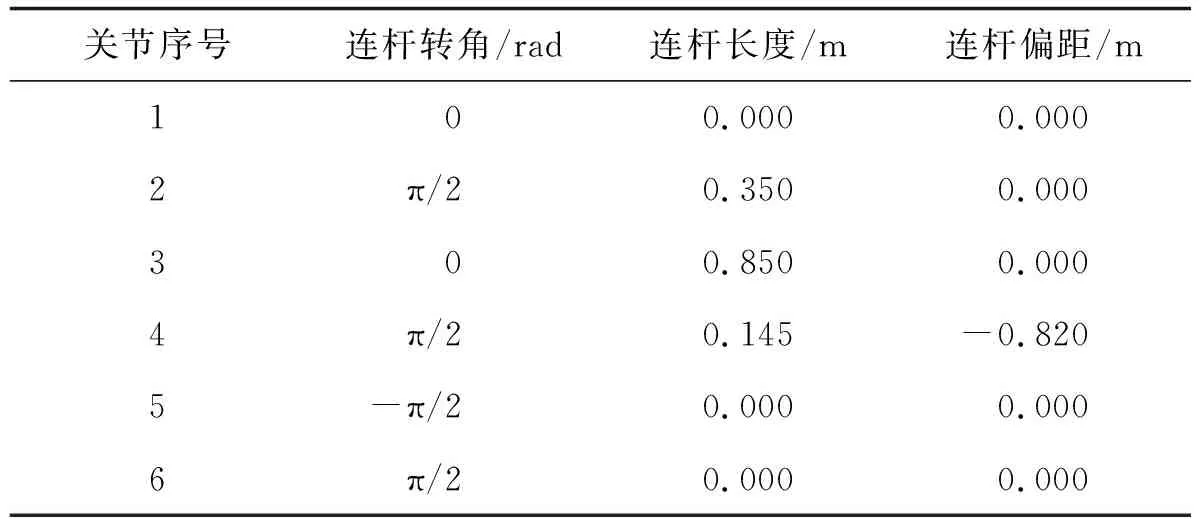
表1 KUKA KR60-3 DH參數
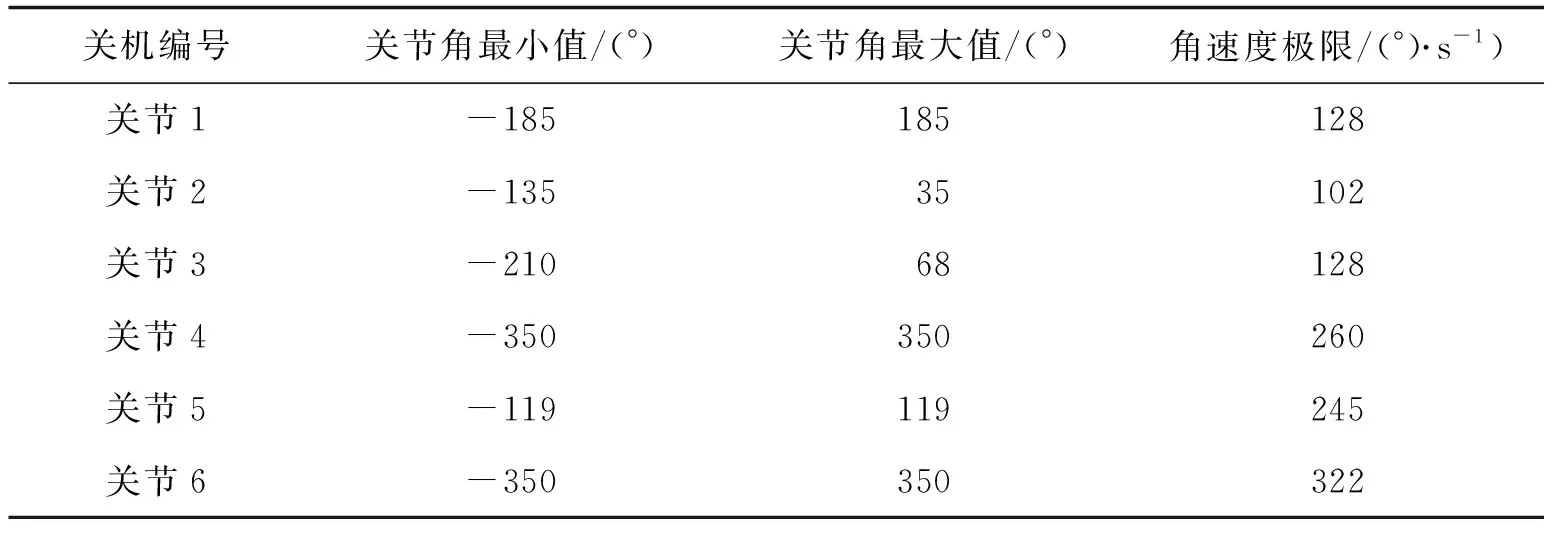
表2 KUKA KR60-3運動限制條件
激勵軌跡采用有限項傅里葉級數函數,如式(26),基頻選用0.041 7 Hz,周期是24 s。這種軌跡有以下幾種好處:末端軌跡封閉,可以方便地進行多次重復試驗,并通過解析法求解關節角速度和角加速度,如式(27)(28),有效地降低噪聲帶來的影響。圖3展示了該軌跡的三維圖形。
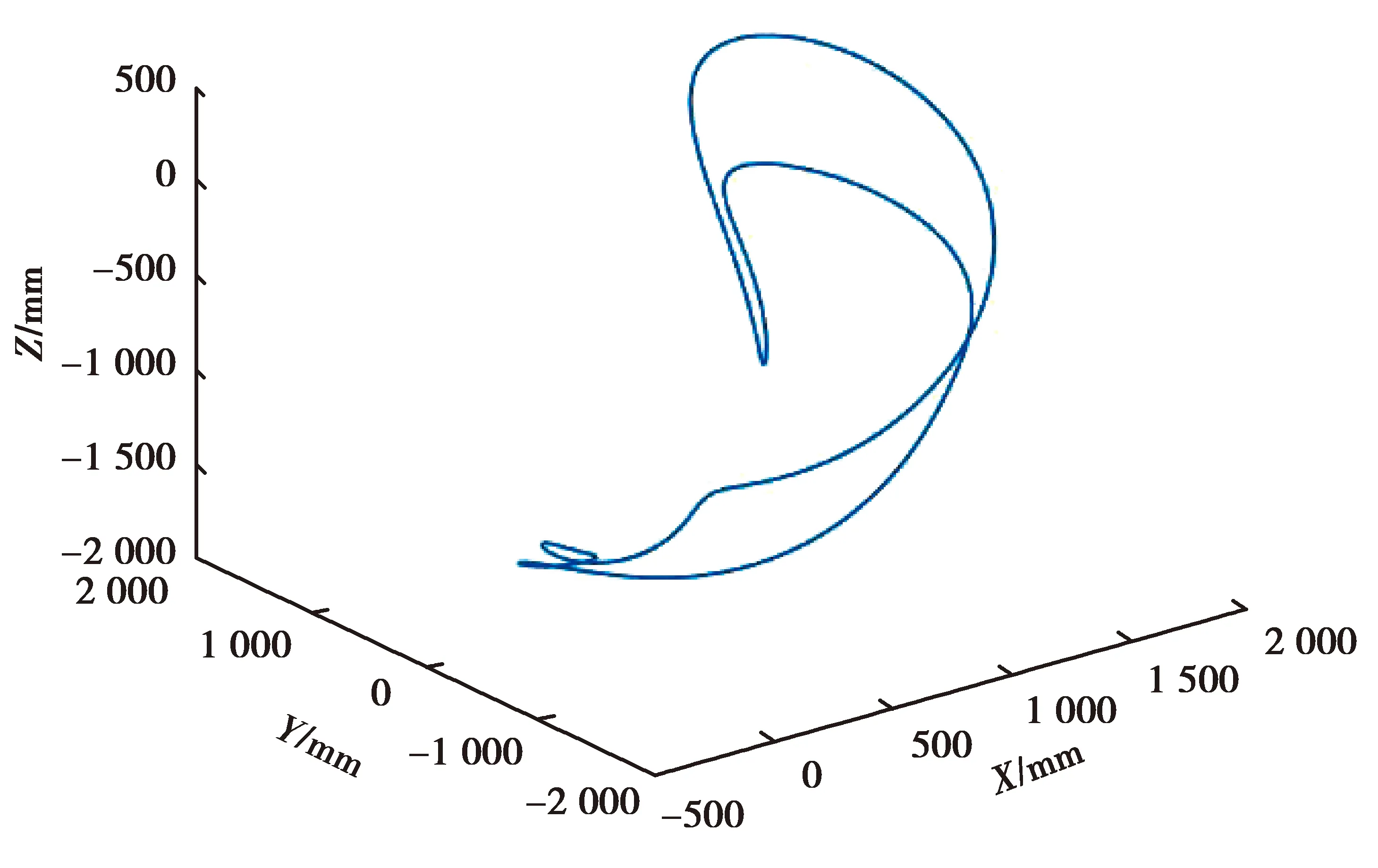
圖3 機器人軌跡Fig. 3 Robot trajectory
(26)
(27)
(28)
3.2 實驗結果與分析
為了辨識相關的能耗參數,設計了6個關節的傅里葉級數軌跡,并在關節空間對KUKA機器人編程。KUKA機器人的控制器提供關節扭矩和關節位置的數據接口,使得采集數據變得相當方便。
信號采集設備的采樣周期是12 ms,采樣數據包括所有關節位置和關節扭矩。最后采用最小二乘法求解機器人損耗表達式中的相關系數。
表3給出了參數辨識的結果(包括外圍設備的恒定功率),圖4對比了機器人的測量功率和基于辨識結果的預測功率。綠線代表實際測量功率,紅線代表預測功率,藍線代表兩者之差,表4展示了相關的預測誤差項。從圖4可以看出,除了機器人剛開始運動的部分,測量功率和預測功率的差值很小。
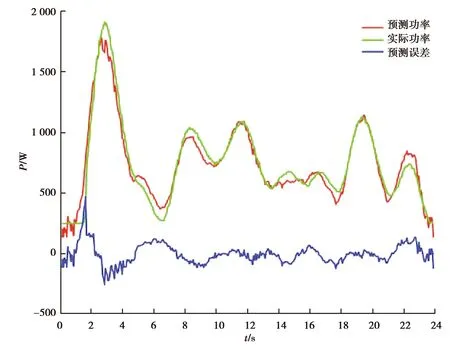
圖4 機器人功率圖Fig. 4 Robot power diagram
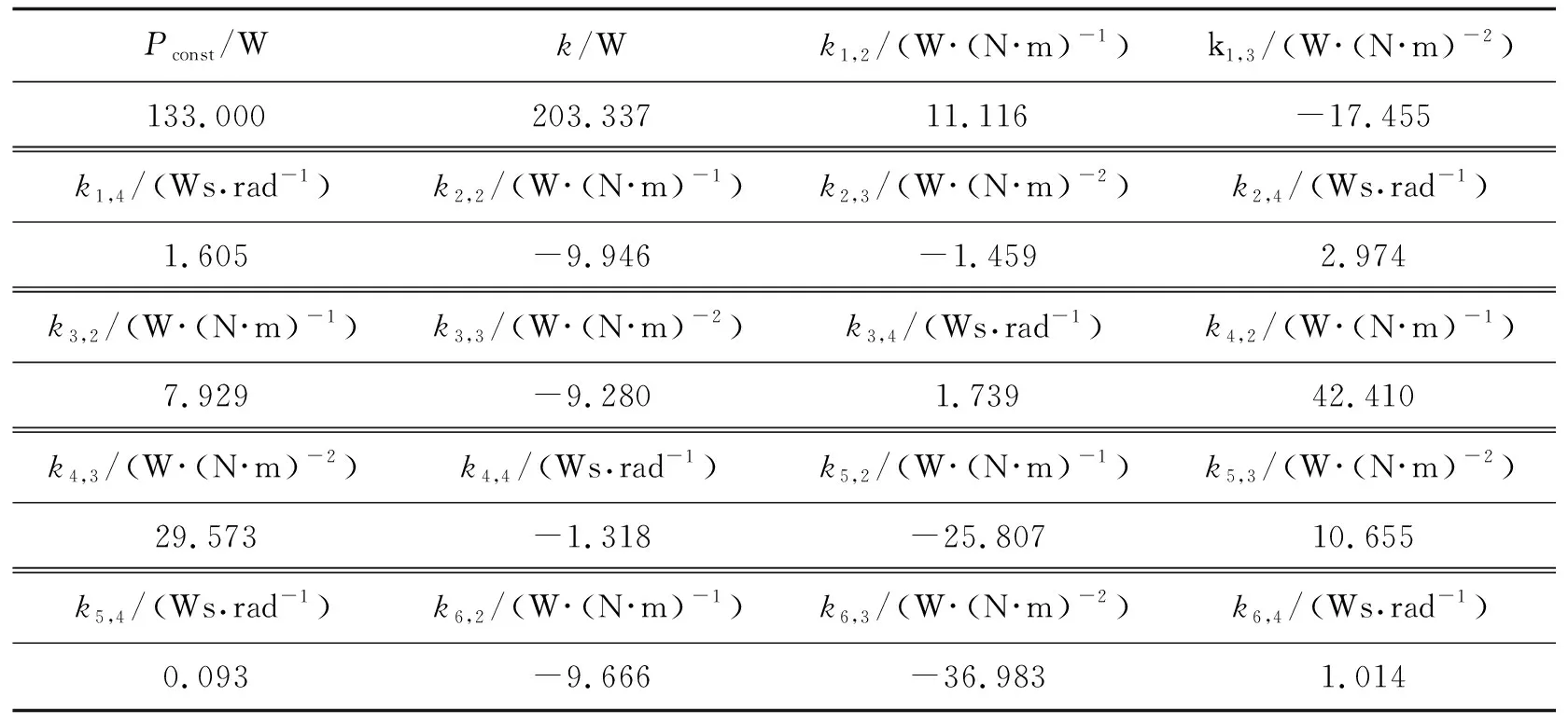
表3 參數辨識結果

表4 辨識軌跡功率相關誤差
為了驗證能耗模型和參數辨識結果的有效性,設計了不同于辨識實驗的軌跡。該軌跡的實際測量功率和預測功率及兩者的差值如圖5所示。功率和能耗的相關誤差項如表5所示。

圖5 機器人驗證軌跡功率圖Fig. 5 Robot power diagram of verification trajectory

表5 驗證軌跡功率相關誤差
圖5表明,預測功率和實際功率的誤差很小,說明了辨識結果的正確性,該方法可以有效預測機器人的功率。
在圖4和圖5中,軌跡起始部分的功率預測誤差都比較大,這是機器人的瞬態效應引起的。
總體來說,不管是參數辨識軌跡還是實驗驗證軌跡,功率的預測誤差相對于測量值都是很小的。從表4和表5中可以看出,預測功率的均方根相對誤差在10%以內,而預測能耗的相對誤差則在1%左右,這是功率預測誤差正負相抵消的結果。
4 結 語
筆者詳細分析了工業機器人電氣系統的工作原理和功耗特性,并整合各元件的損耗,將機器人的總損耗表示為電機扭矩和角速度的函數。在此基礎上,設計機器人的有限項傅里葉級數軌跡,使用最小二乘法辨識損耗系數。為了驗證方法的有效性,在KUKA KR60-3機器人上開展了驗證實驗。研究結果表明,在未知機器人電氣參數的情況下,該方法可以有效預測機器人的實時功率和總能耗。