突出重點目標(biāo)跟蹤的分布式MIMO雷達(dá)陣元選取
2021-11-11 06:15:22蔣春啟鄭娜娥
系統(tǒng)工程與電子技術(shù) 2021年10期
蔣春啟, 鄭娜娥, 左 宗, 王 盛, 陳 翔
(1. 戰(zhàn)略支援部隊信息工程大學(xué)數(shù)據(jù)與目標(biāo)工程學(xué)院, 河南 鄭州 450001;2. 電子信息系統(tǒng)復(fù)雜電磁環(huán)境效應(yīng)國家重點實驗室, 河南 洛陽 471003)
0 引 言
多輸入多輸出(multiple input multiple output,MIMO)雷達(dá)的概念最早提出于2003年[1],主要分為分布式MIMO雷達(dá)[2]和集中式MIMO雷達(dá)[1]兩種。其所具有的分集增益,能夠有效抑制干擾、提高分辨率、克服目標(biāo)的雷達(dá)散射截面(radar cross section, RCS)閃爍問題,因此得到了諸多學(xué)者和科研機(jī)構(gòu)的廣泛關(guān)注,研究方向主要集中在波形設(shè)計[3-4],檢測性能分析及檢測器研究[5-8],參數(shù)估計[9-11],陣元、目標(biāo)檢測或跟蹤[12]、功率和帶寬等系統(tǒng)資源的分配[13-21]等。
MIMO雷達(dá)系統(tǒng)性能優(yōu)勢離不開陣元、功率、波形、頻率等系統(tǒng)資源的合理配置。系統(tǒng)資源的合理優(yōu)化分配可以有效提高M(jìn)IMO雷達(dá)的系統(tǒng)性能。本文針對系統(tǒng)資源更為豐富的分布式MIMO雷達(dá)系統(tǒng)的陣元選取問題展開研究。
通過優(yōu)化配置,可以用更少的系統(tǒng)資源達(dá)到同樣的系統(tǒng)性能,降低系統(tǒng)計算復(fù)雜度,提升系統(tǒng)綜合效能,因此具有重要的研究價值。在這方面已有諸多的研究成果,文獻(xiàn)[15]采用啟發(fā)式算法將陣元選取建模為背包問題(knapsack problem, KP),降低了計算復(fù)雜度。文獻(xiàn)[16]采用了陣元聚類分組的方法,每個目標(biāo)只由對應(yīng)的陣元子集跟蹤,分別提出了在復(fù)雜度上更有優(yōu)勢的貪婪多起點搜索(greedy multi-start local search, GMLS)算法和在跟蹤精度上更有優(yōu)勢的公平多起點搜索(fair multi-start local search, FMLS)算法。文獻(xiàn)[17]選取最少陣元的同時盡量降低系統(tǒng)的代價損耗。以GMLS算法為基礎(chǔ),文獻(xiàn)[18-19]以GMLS算法和FMLS算法為參考并進(jìn)行改進(jìn),提出了同時兼顧系統(tǒng)性能和計算復(fù)雜度的改進(jìn)GMLS(modified GMLS, MGMLS)算法。文獻(xiàn)[19-20]在研究多目標(biāo)跟蹤的陣元選取算法時將目標(biāo)分為普通目標(biāo)、可疑目標(biāo)和危險目標(biāo),分別就低跟蹤精度要求場景和高跟蹤精度要求場景進(jìn)行討論,并分別提出了貪婪與公平多起點搜索(greedy and fair multi-start local search, GFMLS)算法和單天線對多目標(biāo)(one antenna to all targets, OAAT)算法。GFMLS算法數(shù)據(jù)處理簡單,適合處理低跟蹤精度要求下不同優(yōu)先級目標(biāo)的陣元選取問題,OAAT算法處理數(shù)據(jù)量大,但可以實現(xiàn)更高要求的目標(biāo)跟蹤性能。
但是以上研究都是針對單任務(wù),實際情況中雷達(dá)系統(tǒng)常需要面臨多任務(wù)的情況,最常見的任務(wù)為目標(biāo)檢測和目標(biāo)跟蹤。雷達(dá)在執(zhí)行多任務(wù)時,會帶來新的資源分配問題,需要考慮任務(wù)間的資源分配,當(dāng)資源不充分時,如何優(yōu)先保障優(yōu)先級高的任務(wù)。因此,需要對分布式MIMO雷達(dá)多任務(wù)資源分配技術(shù)展開研究。Zhang等在文獻(xiàn)[21]中研究了多任務(wù)下分布式MIMO雷達(dá)的資源分配問題,從提高系統(tǒng)性能和降低復(fù)雜度兩個方面著手,綜合考慮目標(biāo)跟蹤和目標(biāo)檢測,在系統(tǒng)資源上同時考慮陣元、功率和帶寬的分配,在陣元選取上采用了改進(jìn)的粒子群算法,將MIMO雷達(dá)的資源分配問題從單任務(wù)推進(jìn)到多任務(wù)。但文獻(xiàn)[21]在綜合考慮不同任務(wù)的性能指標(biāo)時,沒有將具有不同量綱的檢測概率和定位誤差這兩個性能指標(biāo)進(jìn)行去量綱化處理,將不同量綱的參數(shù)強制相加,得出的目標(biāo)函數(shù)缺乏實際意義;同時在進(jìn)行檢測概率的計算時,未能覆蓋整個待檢測區(qū)域,僅考慮了其邊界線,實際應(yīng)用范圍受限;且該文獻(xiàn)平等對待需跟蹤的每個目標(biāo),不能適應(yīng)需要重點跟蹤特定目標(biāo)的情況。當(dāng)在監(jiān)視區(qū)域內(nèi)的多個目標(biāo)中需要重點關(guān)注特定目標(biāo)且系統(tǒng)資源有限時,需要合理進(jìn)行資源調(diào)度以保證重點目標(biāo)的跟蹤性能,確保資源的高效利用。本文針對上述問題,在文獻(xiàn)[17, 19-21]的基礎(chǔ)上提出了基于改進(jìn)FMLS(modified FMLS, MFMLS)的陣元選取模型及求解算法。在計算檢測概率時,全面考慮整個待檢測區(qū)域,同時針對多任務(wù)的情景,對于不同任務(wù)不同性能指標(biāo)的不同量綱的問題,進(jìn)行去量綱化和歸一化處理,使其具有可比性,在多目標(biāo)跟蹤中突出重點目標(biāo)的性能保障,使選用的陣元數(shù)量盡量少,以此建立優(yōu)化模型并求解。
1 系統(tǒng)模型

假設(shè)目標(biāo)勻速運動,目標(biāo)的運動方程為
(1)

(2)
(3)
式中:κ0為噪聲的強度;I2為2×2的單位陣;?為Kronecker積。
可得目標(biāo)的運動方程為
(4)

s(t)=[s1(t),s2(t),…,sM(t)]T
(5)
(6)
假設(shè)系統(tǒng)能夠?qū)崿F(xiàn)同步,第n個接收陣元接收對第p個目標(biāo)的低通等效信號[22]為
(7)
記為
(8)

(9)

2 重要參數(shù)
2.1 目標(biāo)定位誤差的貝葉斯克拉美羅界

(10)
(11)

(12)

(13)
(14)
(15)

(16)
2.2 目標(biāo)的檢測概率
在考慮分布式MIMO雷達(dá)對監(jiān)視區(qū)內(nèi)特定點的檢測時,可以不考慮多普勒效應(yīng)。以文獻(xiàn)[21,25]為參考,在推導(dǎo)檢測概率時可采用Neyman-Pearson準(zhǔn)則。為便于研究,將噪聲考慮為高斯白噪聲,雷達(dá)發(fā)射單脈沖探測信號,利用最大似然比檢測器,對于MIMO雷達(dá)不同路徑,首先進(jìn)行匹配濾波處理,其次作平方律檢波,最后相加[25]。由第m部發(fā)射陣元發(fā)射由第n部接收陣元接收,故系統(tǒng)應(yīng)同時有M×N個輸出。
將匹配濾波器輸出記為Xr,其為一個MN×1向量,當(dāng)目標(biāo)不存在時,用g(r(t)|H0)表示信號的概率密度函數(shù),以g(r(t)|H1) 表示目標(biāo)存在時信號的概率密度函數(shù)。則似然比檢測為
(17)
若檢測門限為δthreshold,當(dāng)‖Xr‖2≥δthreshold時,表示檢測到目標(biāo),當(dāng)‖Xr‖2<δthreshold時表示沒有檢測到目標(biāo)。
(18)

(19)
似然比檢測門限δthreshold由虛警概率確定。則相應(yīng)的虛警概率為
(20)
可以得到檢測門限δthreshold為
(21)
由此可以推導(dǎo)出目標(biāo)檢測概率為
(22)
3 陣元選取模型的建立與求解
文獻(xiàn)[17]提出的FMLS算法通過遍歷所有的初始陣元對,進(jìn)行多輪啟發(fā)式選取,能夠獲得較高的跟蹤精度,但沒有考慮不同目標(biāo)不同跟蹤精度要求的問題。文獻(xiàn)[19-20]提出的OAAT算法將目標(biāo)分為普通目標(biāo)、可疑目標(biāo)和危險目標(biāo),就高跟蹤精度要求場景進(jìn)行了討論,但仍局限于單任務(wù)的情形。本文借鑒FMLS算法和OAAT算法,提出了基于MFMLS的陣元選取模型及求解算法。
3.1 模型的建立
在資源有限的情況下進(jìn)行優(yōu)化模型的建立。本文為最大限度地節(jié)約系統(tǒng)資源,減少陣元使用數(shù)量,以發(fā)射和接收陣元數(shù)量之和為目標(biāo)函數(shù),并使其最小化。在系統(tǒng)的監(jiān)視區(qū)域內(nèi),區(qū)分對待不同目標(biāo),限定發(fā)射陣元、接收陣元的數(shù)量總量和最小檢測概率,同時限制每次可以使用的陣元使用率,以上述條件為約束條件,建立優(yōu)化模型如下:
(23)
式中:以最小的陣元集為目標(biāo)函數(shù),ηp是目標(biāo)p允許的最大位置估計誤差,Pthreshold為檢測概率最小閾值,發(fā)射陣元的數(shù)量不大于M,接收陣元的數(shù)量不大于N,系統(tǒng)總的陣元使用率不大于系統(tǒng)容許的最大陣元使用率σ。
3.2 參數(shù)預(yù)處理
3.2.1 目標(biāo)位置估計精度誤差歸一化
由于系統(tǒng)同時承擔(dān)目標(biāo)跟蹤和目標(biāo)檢測雙任務(wù),需要同時考慮檢測概率Pd和跟蹤目標(biāo)的位置估計精度誤差Emse兩項指標(biāo)。從理論上講,Pd和Emse的取值范圍分別為[0,1] 和[0,+∞),兩者具有不同的量綱,難以將系統(tǒng)的跟蹤性能和檢測性能在同一框架下進(jìn)行比較和討論,這也對多任務(wù)下的資源分配提出了挑戰(zhàn)。一個思路是對不同任務(wù)的性能指標(biāo)參數(shù)進(jìn)行去量綱化和歸一化處理,以便使Emse和Pd具有可比性。為此需要將Emse進(jìn)行歸一化處理,使其取值范圍由[0,+∞)轉(zhuǎn)為[0,1]。為了實現(xiàn)Emse取值范圍的轉(zhuǎn)換,引入?yún)?shù)Emax。Emax為系統(tǒng)進(jìn)行目標(biāo)跟蹤時可能達(dá)到的最大位置估計精度誤差,或者說當(dāng)系統(tǒng)對某一目標(biāo)的位置估計誤差超過Emax時將認(rèn)定為無效跟蹤,失去對目標(biāo)進(jìn)行跟蹤的意義。Emax的值可通過以下方法進(jìn)行確定,一是進(jìn)行仿真分析,以最少的資源進(jìn)行目標(biāo)的跟蹤,得出系統(tǒng)可能達(dá)到的目標(biāo)定位誤差的最大值,以此作為參考,使Emax不小于該值;二是依據(jù)實際需求而定,當(dāng)目標(biāo)定位誤差超過一定值時,跟蹤將失去意義,以此作為Emax的值;三是結(jié)合雷達(dá)系統(tǒng)對目標(biāo)跟蹤的經(jīng)驗積累和仿真分析,人為給出Emax的值。下面給出Emse歸一化的具體步驟。
步驟 1給定Emax,使得Emse∈[0,Emax];
步驟 2去量綱處理,令E1=Emse/Emax,使得E1∈[0,1];
經(jīng)過步驟1和步驟2,雖然已經(jīng)實現(xiàn)了Emse的歸一化處理,使其取值范圍與Pd一致。但兩者仍然存在區(qū)別,Pd的值越大代表檢測性能越好,而Emse的值越小表示跟蹤性能越好。為了進(jìn)一步消除不一致,在前兩個步驟的基礎(chǔ)上繼續(xù)采取如下步驟。
步驟 3令E2=E1·(-1)+1,使得E2∈[0,1]。
至此完成了Emse的歸一化處理。
3.2.2 不同目標(biāo)的權(quán)重處理
對于系統(tǒng)需要跟蹤的多個目標(biāo),重點目標(biāo)和普通目標(biāo)的跟蹤精度要求不同,因此在考慮綜合跟蹤性能時需要對不同的目標(biāo)區(qū)別對待,為此需要引入權(quán)重系數(shù)。
目標(biāo)的重要程度與其跟蹤精度要求有關(guān),跟蹤精度要求越高,目標(biāo)的重要程度越高,而跟蹤精度的數(shù)值卻越小,因此表示為目標(biāo)p重要程度的權(quán)重系數(shù)ξp與跟蹤精度數(shù)值ηp成反比,即
(24)
式中:ξ為比例系數(shù),在實際應(yīng)用中ηp為已知條件。假定跟蹤目標(biāo)的數(shù)量為Np,所有目標(biāo)的權(quán)重系數(shù)之和為1,則有
(25)
通過式(24)和式(25)可求得ξ和ξp。若通過上式確定的ξp還不足以突出重點目標(biāo),可以引入人為干擾因子進(jìn)行調(diào)控。例如,當(dāng)系統(tǒng)需要跟蹤的目標(biāo)為2個,一個為重點目標(biāo),一個為普通目標(biāo),通過式(24)和式(25)最終求得重點目標(biāo)的權(quán)重系數(shù)為ξim,普通目標(biāo)的權(quán)重系數(shù)為ξnor,引入人為干擾因子Vξ以進(jìn)一步加強對重點目標(biāo)的跟蹤,得到最終點目標(biāo)的權(quán)重系數(shù)為ξim+Vξ,最終普通目標(biāo)的權(quán)重系數(shù)為ξnor-Vξ。
3.2.3 系統(tǒng)綜合性能評價

Perk=δ1(Pd-Pthreshold)+
(26)
式中:δ1和δ2分別為系統(tǒng)檢測性能和跟蹤性能的權(quán)重系數(shù)。當(dāng)δ1>δ2時,系統(tǒng)更加側(cè)重于檢測任務(wù);當(dāng)δ1<δ2時,則更加側(cè)重于跟蹤任務(wù);當(dāng)δ1=δ2時,同樣對待跟蹤任務(wù)和檢測任務(wù)。在實際應(yīng)用中δ1和δ2的值由操作人員根據(jù)實際任務(wù)需求人為確定。
當(dāng)Perk=0時表示系統(tǒng)性能正好達(dá)到性能要求;當(dāng)Perk>0時表示系統(tǒng)性能優(yōu)于性能要求,且Perk越大性能越好;當(dāng)Perk<0時表示系統(tǒng)性能劣于性能要求,且Perk越小性能越差。
通過參數(shù)預(yù)處理,優(yōu)化模型可重新表示為
(27)

3.3 模型求解
使用窮舉法進(jìn)行陣元選取可以得到系統(tǒng)的最優(yōu)解,但其計算量達(dá)到2(M+N)σ,當(dāng)陣元數(shù)量較多時,計算量非常大。此處假定系統(tǒng)跟蹤的目標(biāo)分為重點目標(biāo)和普通目標(biāo)兩種,利用MFMLS算法進(jìn)行陣元選取,具體步驟如下。

步驟 2依據(jù)陣元集Amin計算各目標(biāo)的跟蹤性能和檢測性能,得到每個目標(biāo)的跟蹤精度誤差和檢測概率。若系統(tǒng)性能達(dá)到要求,進(jìn)入步驟13,若系統(tǒng)性能不能達(dá)到要求,轉(zhuǎn)步驟3。
步驟 3若重點目標(biāo)的跟蹤精度得到滿足,轉(zhuǎn)步驟8,否則轉(zhuǎn)步驟4。
步驟 4依據(jù)陣元集Amin,并由式計算系統(tǒng)綜合性能,記為Per。
步驟 5在陣元集B中選取1個陣元X加入到陣元集Amin中,并更新Amin和B,即Amin=Amin∪{X},B=B{X}。根據(jù)更新后的Amin計算系統(tǒng)的綜合性能,記為Per′,并計算Δper=Per′-Per。隨后在Amin去掉陣元X,再次更新Amin和B,Amin=Amin{X},B=B∪{X}。
步驟 6重復(fù)步驟5,遍歷集合B中的每一個陣元,得到使Δper取得最大值的陣元X′,將陣元X′加入到集Amin中,并更新Amin和B,即Amin=Amin∪{X′},B=B{X′}。
步驟 7重復(fù)步驟4~步驟6,直到重點目標(biāo)的跟蹤性能得到滿足或者Amin中陣元是數(shù)量達(dá)到系統(tǒng)容許的最大陣元使用率。若Amin中陣元數(shù)量達(dá)到系統(tǒng)容許的最大陣元使用率,轉(zhuǎn)步驟13,否則轉(zhuǎn)步驟8。
步驟 8依據(jù)陣元集Amin計算對不同特定目標(biāo)的跟蹤性能和檢測性能,得到每個目標(biāo)的跟蹤精度誤差和檢測概率。若系統(tǒng)性能達(dá)到要求,轉(zhuǎn)步驟13,若系統(tǒng)性能不能達(dá)到要求,轉(zhuǎn)步驟9。
步驟 9依據(jù)陣元集Amin,忽略掉重點目標(biāo)并由式(26)計算系統(tǒng)綜合性能,記為Per。
步驟 10在陣元集B中選取1個陣元X加入到陣元集Amin中,并更新Amin和B,即Amin=Amin∪{X},B=B{X}。根據(jù)更新后的Amin忽略掉重點目標(biāo)并計算系統(tǒng)的綜合性能,記為Per′,并計算Δper=Per′-Per。隨后在Amin去掉陣元X,再次更新Amin和B,Amin=Amin{X},B=B∪{X}。
步驟 11重復(fù)步驟9,遍歷集合B中的每一個陣元,得到使Δper取得最大值的陣元X′,將陣元X′加入到集Amin中,并更新Amin和B,即Amin=Amin∪{X′},B=B{X′}。
步驟 12重復(fù)步驟8至步驟10,直到系統(tǒng)性能得到滿足或者Amin中陣元是數(shù)量達(dá)到系統(tǒng)容許的最大陣元使用率。
步驟 13重復(fù)步驟1~步驟12,遍歷所有的初始陣元對,得到諸多陣元集Amin。在諸多的陣元集Amin中選擇在滿足系統(tǒng)性能且陣元數(shù)量最少的陣元集合,若有多個陣元數(shù)量同樣少的陣元集合,則選擇其中綜合性能最好的陣元集合;若系統(tǒng)性能不能得到滿足,則在諸多的陣元集Amin中選擇能夠滿足重點目標(biāo)跟蹤性能并盡量提高其余性能的陣元集;若重點目標(biāo)的跟蹤性能不能得到滿足,則選擇系統(tǒng)綜合性能最好的陣元集。
3.4 算法復(fù)雜度分析
進(jìn)行陣元選取時,不同算法的復(fù)雜度不同,窮舉法需要進(jìn)行2(M+N)σ次陣元選取。MFMLS算法最多需要進(jìn)行((M+N)σ-2)((M+N)σ-1)MN/2次陣元選取,通過對比可以看出,當(dāng)系統(tǒng)的陣元數(shù)量較多時,本文算法復(fù)雜度降低明顯。
4 仿真實驗與分析
假設(shè)分布式MIMO雷達(dá)系統(tǒng)分布在6 km×6 km的二維笛卡爾坐標(biāo)系內(nèi),發(fā)射陣元數(shù)M=8,接收陣元數(shù)N=8,形成圓形雷達(dá)陣,雷達(dá)使用使用率σ=0.75。假定待跟蹤的目標(biāo)數(shù)量為NQ=3,目標(biāo)初始位置為(-2 800,1 000) m、(-150,800) m和(-150,600) m,以60 m/s的速度沿不同方向運動。第一個目標(biāo)為重點目標(biāo),位置估計精度要求為η=9 m,加入人為干擾因子后其權(quán)重系數(shù)ξ1=0.9;另兩個目標(biāo)為普通目標(biāo),位置估計精度要求為η=18 m,加入人為干擾因子后其權(quán)重系數(shù)ξ2=ξ3=0.05。檢測概率最小閾值要求為Pd≥0.9,計算檢測概率時,平等對待監(jiān)視區(qū)域內(nèi)的每一個點。以Δt=2 s的時間間隔進(jìn)行取樣觀測,從觀測數(shù)據(jù)中取12幀數(shù)據(jù)進(jìn)行對比分析。每個發(fā)射陣元用于不同任務(wù)的發(fā)射功率均為pmax=1 500 W,信號有效帶寬、有效時寬、波長分別為1.5 MHz、10 μs、0.3 m,脈沖重復(fù)頻率為fr=53 kHz。假設(shè)系統(tǒng)中目標(biāo)對雷達(dá)各方向散射截面積均相同,取散射系數(shù)均為0.9。此處平等對待不同任務(wù),故取δ1=δ2=1,同時取Emax=50 m。仿真采用Num=500次蒙特卡羅進(jìn)行統(tǒng)計平均。
首先給出陣元在系統(tǒng)中的空間位置及目標(biāo)的運動軌跡,如圖1所示。
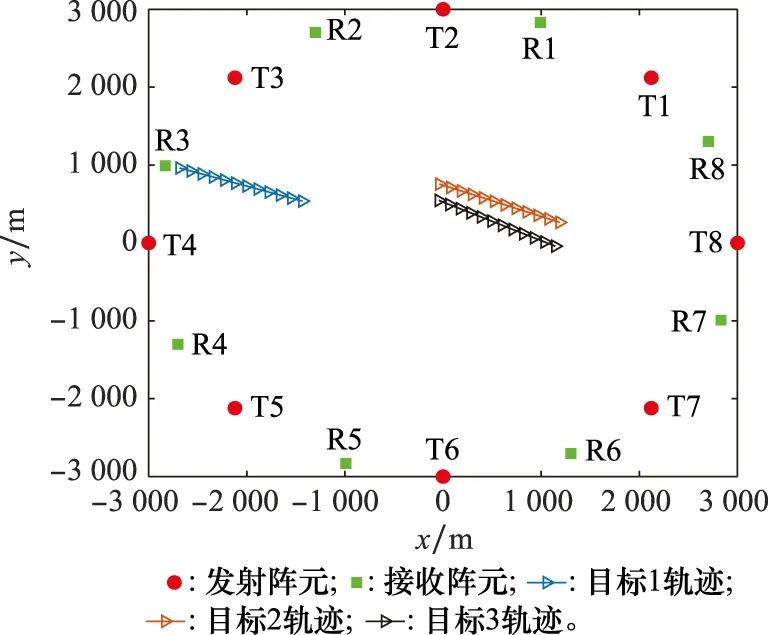
圖1 雷達(dá)與目標(biāo)的位置及目標(biāo)的運動軌跡Fig.1 Radar and target position and target’s motion trajectory
為了驗證本文算法的有效性,此處將MFMLS算法與其他算法進(jìn)行比較。一是最少陣元數(shù)量窮舉法,用窮舉法尋找滿足系統(tǒng)性能且陣元數(shù)量最少的陣元集,將此處的窮舉法稱為最少陣元數(shù)量窮舉法。二是首先利用MFMLS算法得到陣元數(shù)量,其次用該陣元數(shù)量為參數(shù),利用窮舉法進(jìn)行陣元選取,此時,將其稱為固定陣元數(shù)量窮舉法;三是首先利用MFMLS算法得到陣元數(shù)量,其次用該陣元數(shù)量為參數(shù),隨機(jī)選取發(fā)射和接收陣元,將這種方法稱為隨機(jī)算法。圖2~圖5分別給出了4種算法在檢測概率和3個跟蹤目標(biāo)定位誤差方面的對比。可以看到,隨機(jī)算法無法滿足系統(tǒng)的檢測性能要求,也不能滿足重點目標(biāo)的跟蹤精度要求,不區(qū)分地對待3個跟蹤目標(biāo);而MFMLS算法在各方面性能上均和固定陣元數(shù)量窮舉法接近,且部分優(yōu)于最少陣元數(shù)量窮舉法,三者均能滿足系統(tǒng)性能要求,突出對重點目標(biāo)的跟蹤。
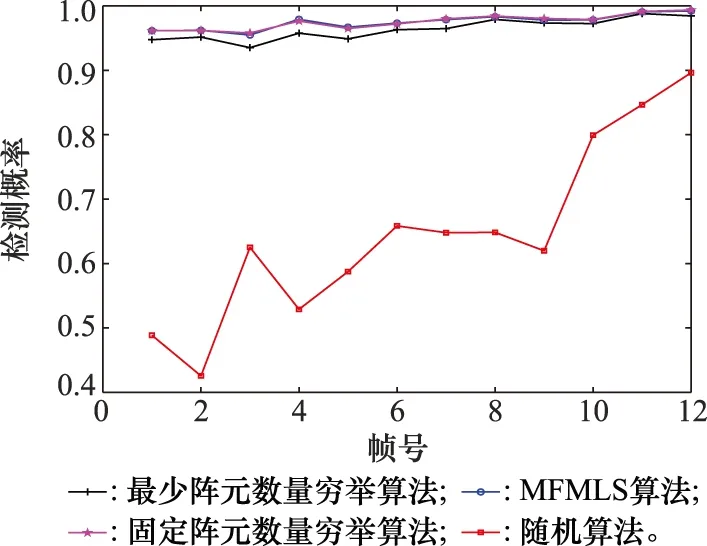
圖2 檢測概率對比Fig.2 Comparison of detection probability
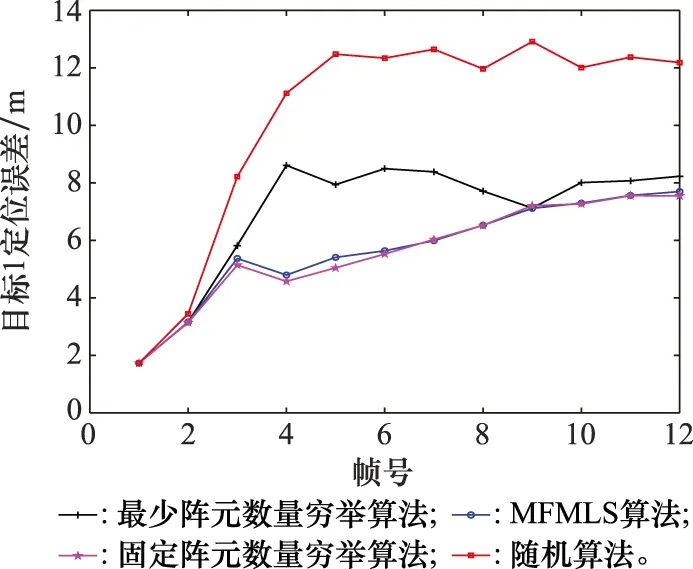
圖3 目標(biāo)1位置估計誤差對比Fig.3 Comparison of position estimation error of target 1
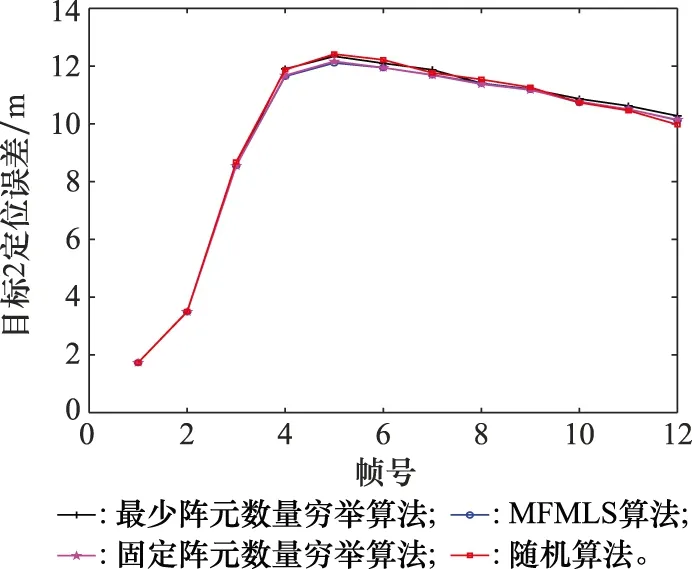
圖4 目標(biāo)2位置估計誤差對比Fig.4 Comparison of position estimation error of target 2
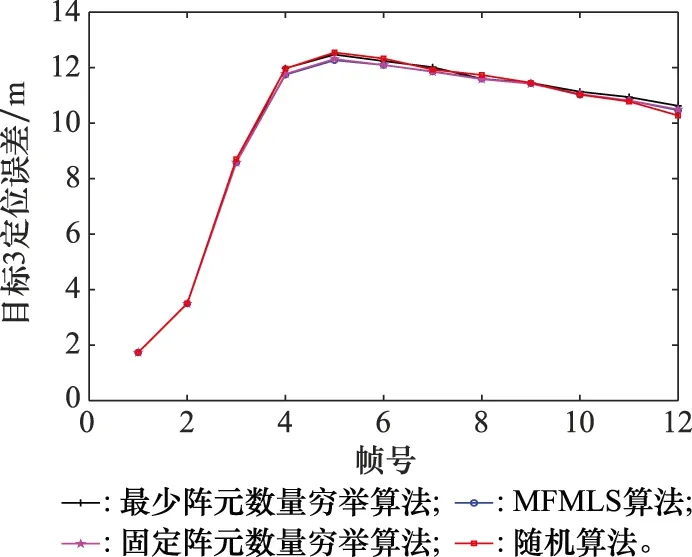
圖5 目標(biāo)3位置估計誤差對比Fig.5 Comparison of position estimation error of target 3
從以上分析上可知,MFMLS算法能夠滿足系統(tǒng)各個單方面的性能要求,下面進(jìn)行系統(tǒng)綜合性能分析。圖6給出了4種算法的綜合性能對比圖,可以看到MFMLS算法的綜合性能優(yōu)于隨機(jī)法,與固定陣元數(shù)量窮舉法接近,且由于在陣元數(shù)量上不能達(dá)到最少,故在性能上相對于最少數(shù)量窮舉法也表現(xiàn)出了一定的優(yōu)越性。除了隨機(jī)法沒能達(dá)到系統(tǒng)的性能要求外,其余方法均達(dá)到了要求,這時MFMLS算法便在計算復(fù)雜度上便體現(xiàn)了優(yōu)勢。圖7是計算復(fù)雜度對比,可以看出,相對于最少陣元數(shù)量窮舉法和固定陣元數(shù)量窮舉法,MFMLS算法在系統(tǒng)計算量上均能得到大幅降低。進(jìn)一步由圖7中數(shù)據(jù)分析可知,MFMLS算法在不同幀相對于最少數(shù)量窮舉法的計算復(fù)雜度的降幅均在93%以上,相對于固定陣元數(shù)量窮舉法降幅在35%~65%。在陣元數(shù)量上,最少陣元數(shù)量窮舉法能夠在滿足性能的前提下達(dá)到最少陣元,由于涉及到多任務(wù)而且不同目標(biāo)的跟蹤精度要求也不同,難以完全做到陣元數(shù)量最少,但500次蒙特卡羅平均值后,MFMLS算法在陣元數(shù)量上接近最少陣元數(shù)量窮舉法。圖8給出了陣元數(shù)量對比圖。
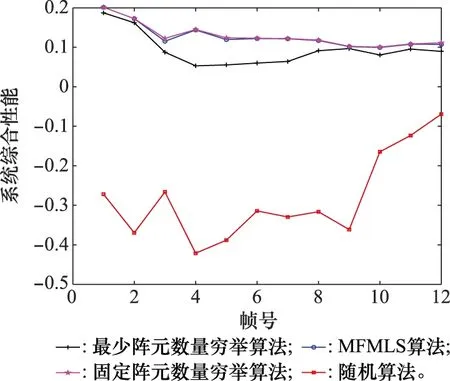
圖6 綜合性能對比圖Fig.6 Comparison of comprehensive performance
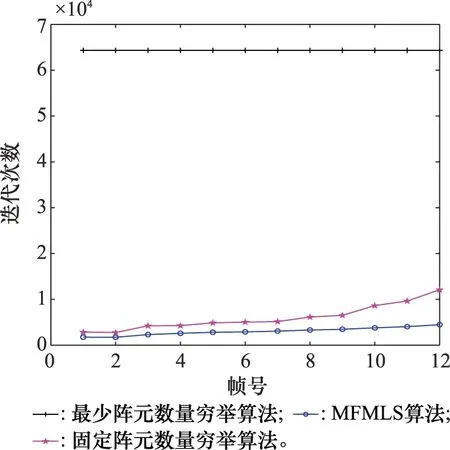
圖7 計算復(fù)雜度對比Fig.7 Comparison of computational complexity
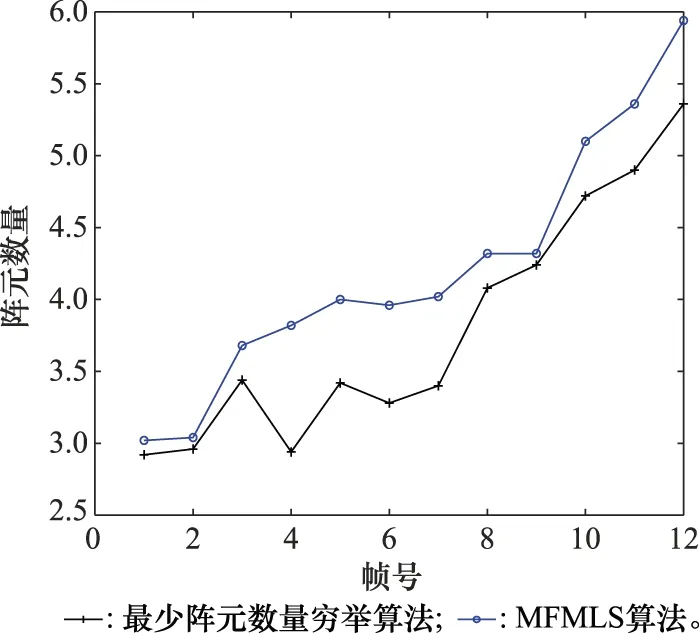
圖8 陣元數(shù)量對比Fig.8 Comparison of the number of antennas
5 結(jié) 論
本文研究了多目標(biāo)跟蹤和目標(biāo)檢測多任務(wù)下的分布式MIMO雷達(dá)的陣元選取問題,且不同目標(biāo)具有不同的跟蹤精度誤差。為了突出對重點目標(biāo)的跟蹤并兼顧系統(tǒng)的整體性能,本文提出了基于MFMLS的陣元選取模型及求解算法。通過仿真實驗,利用MFMLS算法進(jìn)行陣元選取能夠滿足系統(tǒng)性能要求,在系統(tǒng)性能上本文算法優(yōu)于隨機(jī)算法,在計算復(fù)雜度上,本文算法相對于最少陣元數(shù)量窮舉算法和固定陣元數(shù)量窮舉算法均有大幅下降,由此驗證了本文算法的有效性。但本文的研究同樣存在局限性,需要展開進(jìn)一步的研究,如在目標(biāo)運動規(guī)律上,本文的跟蹤目標(biāo)為勻速運動,多任務(wù)下機(jī)動目標(biāo)的跟蹤仍需研究;在目標(biāo)數(shù)量上,本文考慮的跟蹤目標(biāo)數(shù)量較少,大規(guī)模集群目標(biāo)的跟蹤仍需研究;在系統(tǒng)資源上,本文僅考慮了陣元因素,多任務(wù)多資源因素下的資源分配仍需研究。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34