基于指標函數的艦載機機隊回收調度優化研究
2021-11-11 05:59:18蘇析超
系統工程與電子技術 2021年10期
萬 兵, 韓 維, 梁 勇, 蘇析超
(海軍航空大學, 山東 煙臺 264001)
0 引 言
起降作業調度是艦載機作戰能力生成的關鍵環節,從作業周期看,有約1/2時間處于該保障過程[1],包括甲板調運、勤務保障、離場、進近回收等階段。國內外學者集中在甲板作業調度(deck operations course of action planner, DCAP),麻省理工學院團隊基于混合整數規劃、學徒學習、人- 機交互協同決策等方法開展任務規劃與作業調度研究[2-5],國內學者劉翱[6]、Wang[7]、蘇析超[8]等研究多為分段優化調度,如調運規劃、機務勤務保障、出動離場優化及相關問題的魯棒動態調度研究等。而艦載機回收調度,則是安排著艦飛機的降落次序、等待設置、復飛逃逸處理和著艦時間,并設定飛機相應尾流間隔,使得機隊著艦等待時間最短、著艦時間窗最小,提高剩余燃油量、增加著艦安全裕度,最終提升機隊回收效能算法。此外,艦載機起降時要求航母調轉航向至利于提供甲板逆風以保障起降作業安全,此時航母機動防衛能力弱[1],故開展機隊回收優化調度研究對艦-機適航性及航母生存能力意義重大。
回收排序若由人工調度完成,則存在調度規模有限、復飛處置不靈活等問題,由于僅一條著艦跑道,難以實現多人協同調度,極大限制了回收機隊規模。此外,與民航飛機進出港排序調度差別較大[9-12],一是進出港飛機計劃性強、航線固定,而艦載機空中任務隨機性大;二是大型陸基機場空間大、甚至多著陸跑道,而航母為動平臺、單著陸跑道且空間有限,與甲板作業空間耦合多;三是民航飛機著陸成功率極大基本不存在復飛情況,而艦載機經常發生復飛逃逸情況需重新著艦;四是艦載機高強度任務更容易出現空中故障,給回收排序帶來新情況,需調整調度策略;五是盡管返航具有隨機性,但艦載機作業的集中出動與回收特點明顯,甲板空間約束與作業安全特點要求其采用盡可能小的時間窗完成回收[13]。故艦載機回收排序動態性更強、突發情況更多,任務效率和安全性比經濟性指標要求更高。因此,艦載機回收調度自動規劃算法研究現實意義較大。
艦載機回收調度研究,排序方法有先到先服務、時間提前量法(time advanced, TA)與約束位置交換法(constrained position shift, CPS),劉洪等[13]對艦載機著艦排序提出了基于優先級的插入排序與速度調整算法,但未進行復飛處置策略、優先級最優評估研究。Wu、Cui等[14-15]給出了艦載機回收排序模型及任務規模模型,主要以啟發式規則構建為主,但主要基于靜態調度,對復飛情況處置策略適應性不強。而對于民航飛機進場排序則開展了大量研究,模型方面有動態排序、基于滾動時域的動態調度、多跑道協同調度[16-17];算法方面有遺傳算法、模擬退火等元啟發搜索算法[10-12,17]和動態規劃、分支定界等精確解法[18-19]。但是由于艦載機回收調度的動態特性突出,許多現有文獻成果難以直接轉化運用。
而針對動態調度問題,Su等[20]給出了魯棒調度解決思路,劉繼新等[21]開展動態協同排序方法,Bennell等[22]基于機場吞吐量、飛機提前或延遲、燃油經濟效益等多目標給出了靜態計劃下的動態規劃算法和在線動態數據下的鄰域搜索算法。Furini等[23]采用改進滾動時域方法開展動態調度研究。文獻[24-27]則基于排隊論給出了在預約情況或有預先計劃下的在線動態排序與調度研究。而航機場的動態性影響因素主要是氣象變化或空域管理帶來的延遲影響,這與艦載機回收動態因素也不同。
艦載機回收時動態特性隨機性大,除氣象因素外,復飛逃逸、機械故障、甲板清空復位、艦-機同時機動等因素帶來的擾動影響更多,盡管回收有不同飛行程序,傳統靜態調度方法得到排序方案適應能力差,而民航方面的動態調度相關算法時效性遜于艦載機要求。那么,考慮采用指標函數基于機隊空中態勢來實時評估飛機優先序,并按回收編排算法實時給出飛機著艦排序方案。
本文借鑒民航動態排序思想及相關啟發式搜索算法,采用Monte Carlo(MC)模擬機隊進場、復飛、故障率、速度航線調整帶來的時間擾動等隨機因素,引入指標函數完成飛機優先序評估排序,實現對艦載機機隊回收的實時優化調度。對于指標函數系數的求解,則立足差分進化算法對隨機規劃模型進行優化搜索[27-29]。指標函數評估將實時評估回收機隊態勢,從而得到基于該優先序的在線排序。本文核心是離線方式得到最優評估函數系數,并采用MC進行模擬回收實驗進行調度優化檢驗。
1 問題描述
與民航飛機相比,艦載機回收有嚴苛程序、環境惡劣、動甲板跑道狹小、著艦時逃逸或復飛機率大,受氣象海況影響大,同時存在戰機受損、飛行員受傷等情況,因此艦載機著艦回收難度遠大于陸基飛機。此外,回收效率與規模還將直接影響空中機隊執行任務能力。回收效能與飛機性能、飛行員水平、飛行程序、甲板作業能力及任務環境等有關,其排序調度由航空管制指揮系統實施,其能力直接受空管自動化、智能化水平影響。艦載機回收問題研究是優化任務規劃、提高著艦成功率、保障空中安全的基礎關鍵工作。
艦載機進場飛行程序分為目視進場和儀表進場,兩種方式均由程序化進行,其飛行航線及縱向剖面不同(圖1為典型目視進場著艦程序),但飛行程序的邏輯流程與進近排序組織形式一致,抽象出的回收排序與調度邏輯如圖2所示。
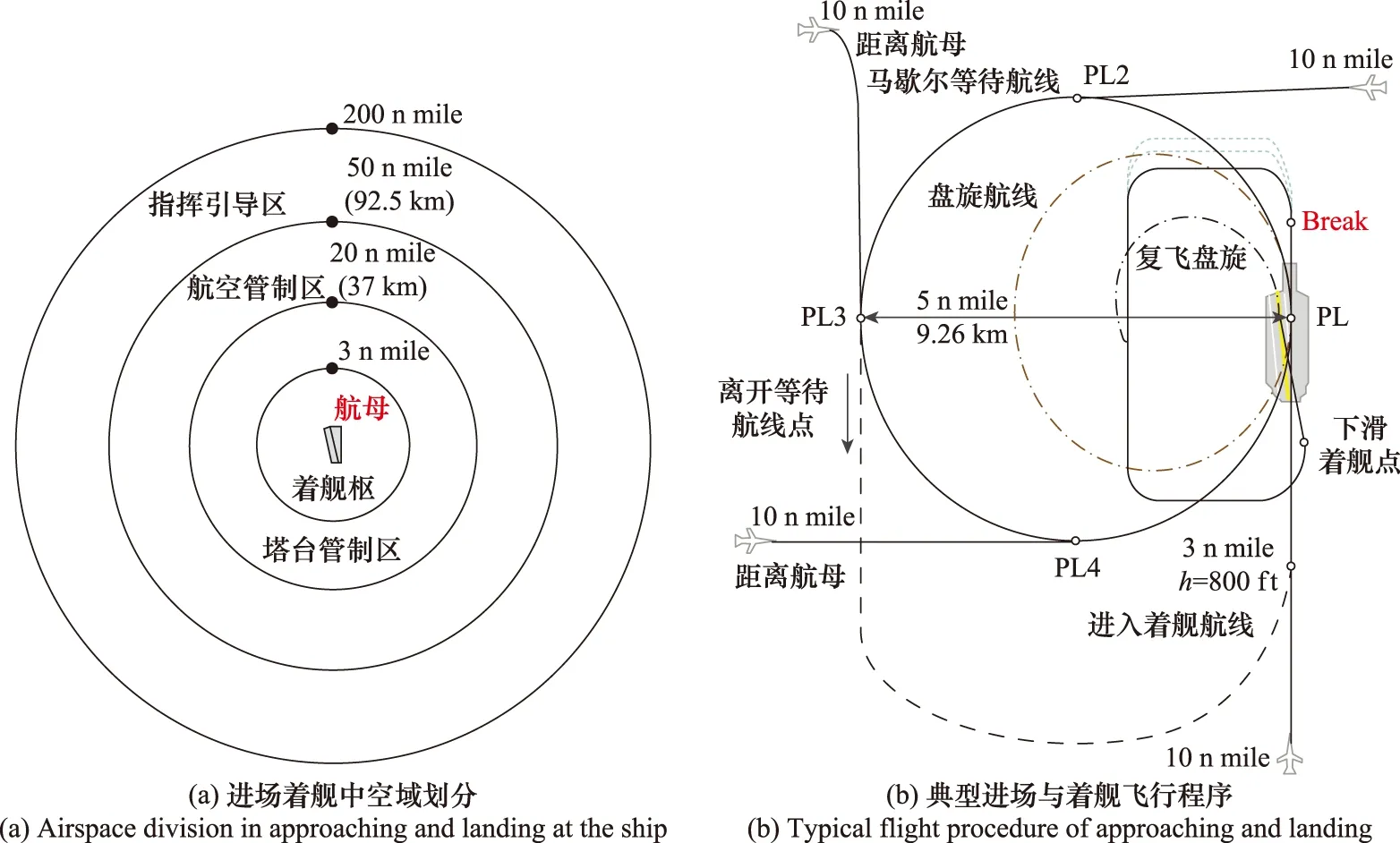
圖1 典型目視進場程序Fig.1 Typical visual approach process

圖2 艦載機回收排序與調度邏輯示意圖Fig.2 Logic diagram of aircraft recovery sorting and scheduling
艦載機回收一般按飛行計劃、飛行程序返航進場,在空中任務完成后隨機加入返航隊列的,在距航母后方約10 nmile時由程序點進入馬歇爾等待航線[30]。期間塔臺管制員將對回收機隊進行排序、馬歇爾分層分配、尾流間隔調(通過速度調節或航線微調),完成排序等待后,根據著艦跑道清空情況,依序安排馬歇爾等待區飛機從等待航線出發點離開并進入初始進近點,降高并進入著艦航線依次著艦。期間如飛機發生機械故障或燃油不足時則調高優先序并提前著艦;如發生逃逸或復飛,進入復飛隊列并加入馬歇爾等待航線等待下次著艦。所以發生復飛的飛機實際等同于后期加入等待區的飛機,故調度排序應基于整個等待區堆棧內飛機的優先序進行。而調度員所關心的調度效能問題則是本文的研究重點,因此艦載機機隊回收調度優化問題可抽象為滿足飛機安全尾流間隔、剩余燃油及跑道清空復位等約束情況下,確保著艦作業時長最短、機隊等待時間少而剩余燃油最多的隨機規劃問題。
調度中,等待區飛機堆棧管理是回收排序問題核心,包括優先序評估出棧、預計著艦時間(expectation time of approach, ETA)評估進棧與分層分配、棧內飛機盤旋圈數更新和尾流間隔調節(速度調整等)。在回收調度設計中,飛機ETA則為最關鍵的因素,其由飛行程序、等待區盤旋圈數、飛機與航母實時相對位置和速度測算出來。本文主要基于初始ETA,經由盤旋圈數及速度尾流調整進行更新測算。若飛機最終成功著艦,那么其ETA則調整為調度著艦時間(scheduling time of approach, STA);若飛機發生逃逸復飛,那么其ETA還應該繼續更新,重新加入等待堆棧。
2 回收調度數學模型
艦載機進機回收是有限緩存區的單機調度問題[31],但與傳統單機調度差別甚大,體現在加工工件(飛機)具有抵達隨機性、飛行持續性且僅能通過盤旋、調整速度方式進行等待,最為重要的是還可能出現一次加工不成功的問題,即復飛重著艦處理。為更好地建立機隊回收調模型,針對著艦回收過程作如下假設[13-14]:① 所研究的是艦載機常歸作業下,波次集中回收問題。② 研究艦載機機型屬中、輕型飛機,相互間尾流間隔基本相同。③ 假定進場及等待段飛機以經濟航速飛行(最優耗油率),且經濟航速基本相同;著艦段按飛行程序“五邊著艦”要求飛行,其飛行時間基本相同且由基本著艦所需時間和隨機調整時間構成。④ 飛機在馬歇爾等待區各層盤旋所需時間基本相同,其值由基本盤旋時間和隨機調整時間構成。因為艦-機是相互運動的,等待區也在運動,加之各機速度及轉彎操縱的不同,處理時間上會有所攝動。⑤ 盡管可以有多種著艦回收模式,但構成邏輯相同(見圖2),復飛盤旋等待區是一個邏輯的存在,可以是馬歇爾等待區,也可以自行設置一個盤旋區。若出現多機先后發生復飛情況,那么假設其復飛等待區也是分層設置的。⑥ 除著艦末段外,飛行速度基本為經濟航速,約為航母速度一個數量級以上,故在簡短的機隊回收過程中將航母視為相對靜止。⑦ 飛機的首次著艦、復飛著艦,其成功概率均相同。⑧ 上述隨機調整時間均符合各自規律的正態分布。基于上述假定,現建立艦載機回收調度數學模型。
2.1 參數符號定義
i:飛機編號,i∈N={1,2,…,n};
j:馬歇爾等待區分層數,j∈M={1,2,…,m};
si:飛機i的STA;
ei:飛機i的ETA;

ek(j):飛機k分配在第j層時預計著艦時間;

oi:飛機i的剩余燃油量(amount of residue oil: RO);
Ti:飛機i的燃油消耗率;
Ci:飛機i的滿載油量;



H1(i)、H2(i):飛機i是否發生第1次、第2次復飛逃逸情況;
ti, j:飛機i在第j層內盤旋一圈所需時間;
ti,j′、ti,j″:飛機i在復飛相應等待區第j′、j″層內盤旋一圈所需時間;
Δτi, j:飛機i在第j層內盤旋時因尾流間隔或塔臺要求進行微調的隨機量;
Δτi,j′、Δτi,j″:飛機i在復飛相應等待區第j′、j″層內盤旋時因尾流間隔或塔臺要求進行微調的隨機量;
Δδ(i):飛機i在正常著艦中因安全尾流或操縱原因所需時間的調整量,為隨機量但散布不大;
Ta(i):飛機i在復飛中“五邊著艦”所需時間;
Tδ(i):飛機i在復飛著艦航線中因尾流間隔或突發情況的調整時間,為隨機量但散布不大;
PR(i):飛機i在等待區中特殊優先級狀態。
2.2 基于等待圈數的隨機規劃模型
2.2.1 目標函數
回收排序與調度最終實現著艦時間窗盡可能小,飛機總等待時長盡可能短,機隊剩余燃油盡可能多等目標,分別由Z1、Z2、Z3表示。其中,飛機等待時長由最終調度著艦時間STA與初始預計著艦時間ETA0之差來表示。最終是實現飛機集中回收,減少對著艦跑道的長時間占用,提高甲板作業保障效率,利于提升艦載機出動效能;同時,盡可能降低飛機盤旋等待圈數,整體優化著艦飛機序列;剩余燃油量越多代表著艦安全性、經濟性越高,也體現訓練的科學性。故目標函數記為
(1)
2.2.2 約束條件
(1) 剩余燃油約束
從飛行安全裕度看,飛機著艦時剩余燃油應至少超過滿載油量的const%,那么約束記為
oi≥Ci·const%,?i∈N
(2)
式中:const值可根據飛機性能和任務情況取不同值,如取20%。
而從飛機進近開始,經馬歇爾等待區排序,后到成功著艦的過程中,飛機的剩余燃油量與預計著艦時間的關系,可近似記為
(3)

(2) 安全尾流間隔約束
根據文獻[32]關于飛機安全尾流間隔有關要求,對于本文所研究的艦載機假定為中型機,那么其間隔為6 km,又由于飛機進場速度約為0.45 Ma(經濟耗油率飛行)、著艦速度平均[30]約為0.32 Ma,經計算有馬歇爾等待區安全尾流間隔ε1約40 s,著艦航線區安全尾流間隔ε2約55 s,記為
(4)
式中:?k,l∈N|k,l為前后續飛機,?j∈M。
(3) ETA約束
定義 1艦載機單次著艦成功概率P0,其對立事件為發生復飛逃逸,即復飛概率Pl0,記為Pl0=1-P0。
引理 1如果艦載機在允許復飛著艦情況下,累計著艦成功概率大于0.99則認為成功著艦,那么對于一次性著艦成功概率P0>0.9,艦載機最多經歷兩次復飛便能成功著艦。
證明對于一次性著艦成功概率P0>0.9時,假如無復飛情況,艦載機累計成功著艦概率大于0.9,不滿足條件要求;假如有一次復飛著艦機會,累計成功著艦事件包括:第一次著艦成功、第一次失敗和復飛著艦成功,其對立事件為第一次著艦和復飛均不成功,概率P記為
P=P0+(1-P0)P0=1-(1-P0)2≥0.99,P0≥0.9
(5)
累計成功著艦概率大于等于0.99,尚不能完全滿足要求;假如有兩次復飛著艦機會,累計成功著艦事件包括:第一次著艦成功、第一次失敗第一次復飛著艦成功、第一次和復飛第一次失敗但復飛第二次成功,其對立事件為第一次著艦和兩次復飛著艦均不成功,概率P記為
P=P0+(1-P0)P0+(1-P0)2P0=
1-(1-P0)3≥0.999,P0≥0.9
(6)
累計成功著艦概率大于等于0.999,完全滿足條件要求。因此,假若有n次復飛機會,艦載機累計成功著艦概率
P=1-(1-P0)n+1
(7)
對于P0>0.9,欲使P>0.99,可得n≤2。
故最多兩次復飛能實現艦載機成功著艦。
證畢

(8)
發生第一次復飛:
(9)
發生第二次復飛:
(10)
式中:該期望著艦時間關系式由多個隨機事件約束來表達。
(4) STA等式約束
經過排序與復飛調度后的著艦時間STA,即為經過復飛后成功著艦的最終期望著艦時間,記為
si=ei,?i∈N
(11)
(5) 飛行速度約束
飛行速度應滿足飛線包線要求,進近階段速度假設在經濟速度附近,那么飛機速度變化及時間調整率滿足
(12)
式中:αi,βi分別表示速度變化對時間調整的延后率、提前率。即通過速度調整,ETA時間范圍是[αiei,βiei]。
(6) 著艦跑道清空約束
前續著艦飛機是否離開跑道,攔阻索是否復位,即跑道是否已清空,否則飛機安排復飛處理。因跑道清空時間小于著艦段尾流間隔時間,故該約束包含于尾流間隔約束。
2.2.3 決策變量

(13)
(2)H1(i)、H2(i)為0-1布爾決策變量——復飛,是飛機以復飛逃逸隨機事件是否發生決定,分別表示第1次或第2次復飛,見式(9)~式(10)。
(3) Δτi, j、Δτi,j′、Δτi,j″、Δδ(i)、Tδ(i)為隨機擾動量——隨機時間,前3個是飛機在等待盤旋或復飛盤旋時用時的隨機調整量,隨機變量的分布情況需根據平常飛行訓練數據得到,但也可從理論上進行大致估算,主要依據飛機速度微調、盤旋半徑調整控制模擬得出該隨機分布;后兩個分別是首次著艦和復飛“五邊著艦”中用時調整隨機量,其分布情況由飛行訓練統計獲取,也可理論模擬計算。
2.3 多目標優化處理策略
針對所建立的多目標優化模型,最佳策略是加權為單目標化處理。由于調度優化方案在不同情形下側重點會不同,即對子目標的偏好有區別。如,在密集起降作業過程中,甲板作業要求高,任何作業應盡可能降低對甲板資源占用,那么此時機隊著艦時間窗越小越好,其他目標要求相對要低;而在甲板作業并不繁忙情況下,著艦回收跨度可以較長,那么此時飛機總等待時長應盡可能短就顯得重要一些;同樣,在勤務保障較為缺乏情況下,可能剩余燃油量盡可能越多越好。
綜上,看似多目標優化問題,具體到實際狀況時,基本上以單目標優化為主,而如何選取則依據目標權值進行設置。
在多目標加權處理前,將各子目標值進行規范化處理,確保其值均處于同一量級來評估,最終加權得其綜合目標值。多目標式(1)中的3個子目標的權值分別為β1、β2、β3,經加權處理后,多目標化為單目標問題,記為
minimizeZ=β1Z1+β2Z2-β3Z3
(14)

式中:權值設置由調度員根據任務需要或偏好來進行設置。
2.4 決策變量轉化
上述隨機規劃模型反應了艦載機進近回收調度的表現形式,可完整呈現模型,主要從著艦回收整個執行過程來建立,但著艦回收問題隨機性大、安全要求高、機械故障突發性強,因此優化問題本身難以有最優化解。此外,回收決策本身是一個動態與隨機調度相結合的決策問題,決策變量涉及隨機變量及其誘導變量(如復飛情況),而從靜態調度優化角度難以求解,或者僅能獲得某種參考意義解而在實際執行時誘變甚多較難提供可取輔助決策建議,故應尋求動態等效求解方法。
如果從回收調度結果看,第2.2節中的數學模型構建了該問題,而從塔臺調度員角度看,進近回收是一個串行多步決策問題,即基于態勢的評估決策,每次從回收等待機隊中選擇優先序最高的飛機進行著艦,若發生復飛則重新加入等待機隊重新進行著艦調度,直到等待機隊全部著艦完畢。調度員采用的便是基于態勢的動態調度方法,主要憑借經驗和人工啟發式規則進行評估,但調度規模有限。因此,應將該隨機調度問題轉化為評估排序問題,基于態勢打分來確定飛機的優先序進而逐個安排著艦-復飛-著艦。
而在評估排序中,模型的決策變量則是附帶產生,根據飛機排序情況和模型約束要求,進行相應的盤旋等待、安全尾流間隔控制或復飛處置策略。因此,通過設置合理的評估排序算法,可將基于著艦終止狀態的靜態調度問題轉化為動態決策問題,從而獲得模型優化解,優化目標值、盤旋圈數等。
3 排序指標函數與求解算法
針對第2.3節提出的轉換決策變量法,將靜態問題化為動態排序決策,若單純進行隨機排序優化計算,那么該復雜度則為階乘級運算量(如以18架飛機回收為例,計算復雜度為18!)。我們可以考慮選用模擬退火、基因遺傳算法等全局搜索算法直接來求解,然而上述算法除了可能陷入局部收斂、種群早熟、算法效率不夠高等不足外,針對調度過程還存在有隨機發生的飛機逃逸復飛情況,也就是可能出現調度過程中隨機重調度設計問題,而且要求重調度具備在線規劃能力,顯然用最優化目標函數的處理策略難以實現。因此,針對該動態調度問題,考慮引入評估排序算法的多步規劃、實時決策來完成。這里,對回收機隊的評估,本文選用基于線性組合的特征指標函數來達成。
3.1 指標函數設計
人工調度啟發式規則,通常綜合考慮先到先服務(ETA越小優先級越高)、特殊優先級飛機優先(如飛機故障、剩余油量告警等)、復飛飛機優先著艦等原則。借鑒上述規則,那么影響回收飛機優先序的因素應包括:當前ETA、所處在等待區的層級數(如圖2所示)、剩余燃油量、是否處于復飛逃逸狀態、特殊優先級(燃油/機電系統故障)等。在這5個特征因素當中,ETA、RO為連續變量,層級數為離散量,特殊優先級、復飛狀態為布爾量。那么,等待堆棧中飛機的實時態勢評估的指標函數f(i)可由下式表示,對于?i∈N,有:
(15)
式中:ak(i)為經過規范化處理的屬性值;λk|k=1,2,…,5分別是對應上述屬性的系數;C為常數;PR(i)為特殊優先級狀態。特征屬性規范性處理目的,就是在某組選定系數下,使得式(15)的指標值與各特征屬性成統一的正向關系,并且保持與人工啟發式選擇規則相一致。比如,第一項表示ETA越小其份量將越大,第二項則是優先序隨等待區層級變大而變小,第三項則是剩余油量比率越低其影響越大,復飛和特殊優先級狀態則相當于開關控制量,發生該狀態時優先序增大。
指標函數的設計,在設置合理的系數基礎上,目的是給當前堆棧飛機進行評分,評出最高優先序飛機,安排其出棧并進入著艦航線,進而完成動態調度的單步決策動作,不斷評估直到堆棧飛機全部安排完畢。當然,不同指標函數系數的選取將對回收調度結果產生不同影響,即改變第2.2節模型目標函數值。因此,對數學模型的優化求解,最終尋求最優指標函數系數值。
3.2 回收排序編排算法
在給定指標函數系數,規劃模型的多目標處理后,針對機隊返航著艦調度問題,可采用基于指標函數的態勢評估決策和MC模擬復飛來開展動態條件下回收排序方案的編排。
3.2.1 等待區分層分配策略
對返航進場機隊,在進入著艦航線前,需在馬歇爾等待區進行盤旋等待(如圖2所示),并且分組分配在不同的等待層。通常每個等待層至多分配4架飛機,可采取空中任務編隊分組進行等待層分配。本文提出機隊{ETA}集合時間聚類分層的分配策略,并按照先到先服務原則由低到高層進行等待層分配。因為時間聚類方法一定程度上將編隊分組考慮進來了。具體策略是:機隊{ETA0}按照由小到大順序,每n(n≤4)個近鄰飛機分組分配至同一等待層,越往上層ETA值越大。期間,各層進行安全尾流間隔檢查,若滿足則初始{ETA0}保持不變;否則,通過自動進場(速度、航路規劃等)進行調節(不屬于本文研究內容),更新始初進場{ETA0}。完成分層分配后,飛機便在相應等待層盤旋等待進入著艦航線,本文研究主要從安全角度考慮而不進行跨層降高處理(當等待區下層飛機進入初始進近之后,上層機隊并不按照進場時間順序下降到下層等待區)。而處于等待區不同層的飛機在回收著艦中可忽略高度差對著艦時間的影響,因為離開等待區到“五邊著艦”需進行大盤旋飛行轉換,在等待層數較少(小于5)時,其水平航程遠大于高度變化,故忽略降高飛行時高度差所帶來的飛行時間影響(且該處理對最終目標值影響不大)。
3.2.2 復飛處理策略
由于機隊的進近著艦為連續作業、動態推進的過程,進入著艦航線的飛機是否發生逃逸復飛、哪一架會發生,事先無法得知,但是針對該隨機事件,本文引入MC模擬抽樣來模擬可能發生復飛、甚至是二次復飛的飛機,并根據第2節中模型假設的著艦成功率來抽樣發生復飛的飛機架次。該模擬處理能夠逼近真實情況,檢驗算法的效果。
3.2.3 調度編排算法

輸出回收排序方案。機隊著艦序列、著艦時間;目標函數值;機隊盤旋圈數、復飛狀態及等待圈數,飛機最終剩余油量。

步驟 1機隊分層分配進棧。按照第3.2.1節的分配策略,完成機隊分層分配,并將該堆棧記為{M(j)}。
步驟 2堆棧進棧管理。判斷有無加入等待航線的復飛飛機,對于常規回收模式,如有進棧情況則按照由下往上逐層檢查有無空位,并添加復飛飛機入棧等待,否則無操作;對于特殊回收模式,如有進棧情況則在復飛盤旋區(不同于機隊等待區)同樣按照由下往上逐層檢查有無空位,添加入棧,否則無操作。
步驟 3編排結束判定。判定堆棧、航線隊列是否有飛機,若無則結束任務,完成機隊回收,輸出相關信息;否則,堆棧內有飛機進入步驟4,航線隊列有飛機進入步驟8。
步驟 4棧內飛機優先序評定。按照第3.1節指標函數對棧內飛機的優先序進行打分排序。
步驟 5著艦航線隊列判定。航線隊列是否飽和,若是返回步驟4,否則進入步驟6安排飛機出棧。
步驟 6棧內飛機出棧與約束檢查。按照優先序順位出棧原則,首先選擇最高優先序出棧,進行航線隊列尾流間隔檢查,若不滿足則安排下一優先序飛機出棧,并進行間隔約束檢查,直到滿足;否則進入步驟7。
步驟 7堆棧出棧管理。選擇優先序最高飛機出棧,記錄該機ETA。同時更新其他不出棧飛機ETA,處理策略:比較其與出棧飛機的ETA大小(具體如下式判定),若滿足則盤旋圈數不變,其ETA也不變;否則盤旋圈數依次加1并由式(8)更新其ETA,反復檢查下式要求,一旦滿足則停止加圈,并記錄其他相關決策信息(盤旋圈數、隨機量信息)。
ek-eleft≥tk, j+Δτi, j,?k∈M
(16)
式中:M={M(j)}為堆棧內飛機;left為出棧飛機。
步驟 8著艦航線隊列控制。該航線隊列如圖3所示,完全具備流水線隊列特點,但同時還要滿足間隔約束。一是完成出棧飛機的入隊添加,二是刪除隊列中著艦/復飛飛機。
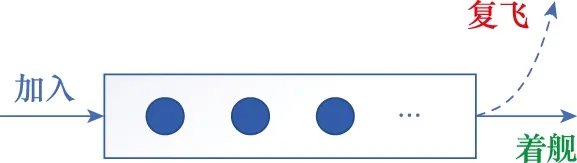
圖3 著艦航線隊列圖Fig.3 Diagram of landing queue
步驟 9飛機復飛模擬判定。利于MC模擬,抽樣出航線隊列中最前位飛機是否發生復飛逃逸情況,若著艦失敗則飛機進行復飛處理,按照式(8)更新飛機ETA(此時復飛等待圈數暫為0),返回步驟2加入等待區堆棧,并記錄復飛狀態;否則記錄出棧飛機ETA等信息(盤旋圈數、復飛狀態、隨機量等),將ETA記為STA,并返回步驟3繼續任務編排。
步驟 10結束后相關計算。回收編排完成后,根據回收機隊排序所生成的輸出信息,計算式(14)目標函數值Z。
綜上,回收排序編排算法結構如圖4所示。

圖4 回收排序與調度算法流程Fig.4 Flowchart of recovery sorting and scheduling algorithm
3.3 指標函數系數優化算法
機隊回收排序為動態隨機過程,難以由靜態調度尋求最優解,于是提出基于指標函數的飛機態勢評估的優先序決策方法完成回收排序,調度方案的生成關鍵在于指標函數系數。那么,在多目標權值和飛機復飛等隨機量分布已知情況下,機隊回收調度優化問題的核心是求解一組指標函數的最佳系數。
該組系數均為正實數,搜索空間為R5正數部分。對于連續變量的優化搜索算法較多,如梯度下降、牛頓搜索、二分法優化等[32],但由于數學模型為隨機規劃模型,一是目標函數的連續可微性難以保證,二是容易陷入局部最優。
為統籌考慮快速收斂和空間全局搜索性能,我們考慮用元啟發式搜索算法—差分進化(differential evolution, DE)算法[28-29],該算法源于遺傳算法但收斂性能更好。為此,本文采用智能搜索算法來實現,提出基于MC模擬與DC結合算法(簡記為MC-DE算法)求解最佳指標函數系數。MC模擬的是模型中的隨機量,DE算法主要對指標函數系數進行群智能優化搜索。系數優化算法的結構流程如圖5所示,其計算步驟如下。

圖5 基于MC-DE的指標函數系數優化算法架構Fig.5 Flowchart for optimization of index function coefficient based on MC-DE algorithm
輸入種群Po;系數維度D為5;總代數T
輸出最優系數向量Δ

步驟 3最優化判定(結束)。若Z(Δ)≥M∨t≤T,則進入差分搜索參數步驟4;否則算法結束。其中M為預設的理論目標值,主要參考人工調度著艦得到結果。

圖5中算法架構中目標函數值的計算主要由第3.2節中調度編排算法完成,MC模擬其中的隨機量與復飛發生情況。指標函數系數的不同取值將直接實時影響回收飛機的優先序,從而在第3.2節編排算法中生成不同排序方案并得到機隊回收目標值,因此尋找最優指標系數將在排序調度中生成最終最佳調度方案。通過調度數學模型和MC-DE算法架構進行最優調度評估,最后得到所需要的指標函數系數,并以此作為回收飛機優先序的打分方法開展回收動態調度工作。
本文所提出的是離線優化策略,即采用MC模擬某機隊回收過程數據及隨機擾動量,然利用調度編排算法和指標系數優化算法,得到調度問題的最佳指標系數,全程采用離線模擬優化處理。其實現過程為由第2.1節中模型合理假設后,由MC模擬機隊進場后預計著艦時間、等待時間、復飛發生概率等隨機量,由DE算法給出初始最佳指標系數,結合數學規劃方法進行調度編排,并以此調度目標值為適應度然后基于DE算法搜索飛機態勢指標函數優化系數。而回到現實機隊回收過程,則可利用離線優化得到的指標系數,完成由飛機態勢-飛機優先序-實時調度著艦-更新飛機態勢-更新優先序的實時評估與決策工作,用于實時評估進場飛機優先序,進而在模型約束下,實時編排回收序列,并實時給出尾流間隔調整策略,得到機隊著艦回收調度方案。
4 實例仿真
假定在著艦回收過程中,甲板攔阻索的復位、著艦跑道清空、工作人員接機準備等因素全部工作正常,均能在著艦航線飛機尾流間隔內完成著跑道清空與攔阻索復位,即復飛逃逸與著艦成功為互補事件。
仿真初始條件設定如下:集中回收機隊數量14架,回收初始參考時刻t0=0,飛機進場時前后機間隔服從均值為1的指數分布(即,間隔為1 min的指數分布散布),通過指數分布隨機數模擬后并進行尺度映射到[18, 36]min,初始數據見表1。飛機進場時剩余燃油量則服從(40%, 10%/2.58)的正態分布(即,每架飛機剩余油量(總滿油量的比率)以99.7%的置信度分布在30%~50%之間),飛機燃油每分鐘消耗率2/300%,飛機在等待區盤旋一圈時間為10/3 min,其隨機散布值服從(0, 0.1/1.96)正態分布(即,隨機值以95%置信度落入[-0.1,0.1]min),著艦成功率取為0.9/0.95,復飛飛機重新調整加入著艦時間為4 min,其隨機散布服從(0, 0.1/1.96)正態分布,假定復飛至少盤旋等待一圈,加入等待航線應滿足尾流間隔要求并調整預計著艦時間,全部飛機等待時間、復飛時間都根據式(3)消耗燃油。著艦回收序列的編排依據隨機規劃模型并由回收編排算法完成。

表1 初始輸入信息Table 1 Initial input information
取多目標函數的權值[β1,β2,β3]=[0.5, 0.2, 0.3],態勢指標函數的系數λi∈[0, 10],仿真運行平臺為Matlab2014a,電腦為IntelI CoreI i7-4790 CPU @3.6 GHz,內存16 GB。
4.1 初始輸入下回收調度優化仿真與分析
基于仿真條件和初始輸入信息,著艦成功率為0.9,研究每個馬歇爾等待層設置4架或3架飛機,利用MC-DE算法進行回收編排與指標函數搜索和調度優化。DE算法種群規模100個,代數為5 000代。圖6為等待層設置4架飛機時對總目標、子目標值,各代最優λ指標系數的散布及最優調度方案的仿真結果。其算法仿真時間3 719.61 s,目標最優值14.98,著艦時間窗24.33 min,最優指標系數[6.47, 2.99, 2.34, 6.94, 5.38],各代平均優化系數[6.61, 4.59, 4.89, 4.62, 5.04]。圖7則為等待層設置為3架飛機的仿真情況。目標最優值15.13,著艦時間窗24.92 min,最優指標系數[7.12, 4.52, 3.87, 4.23, 5.62],各代平均系數值[6.66, 4.61, 4.95, 4.74, 4.77]。


圖6 等待層設置為4架飛機的仿真結果Fig.6 Simulation result of waiting level set to 4 aircraft
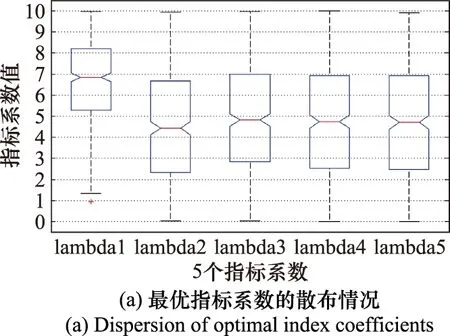
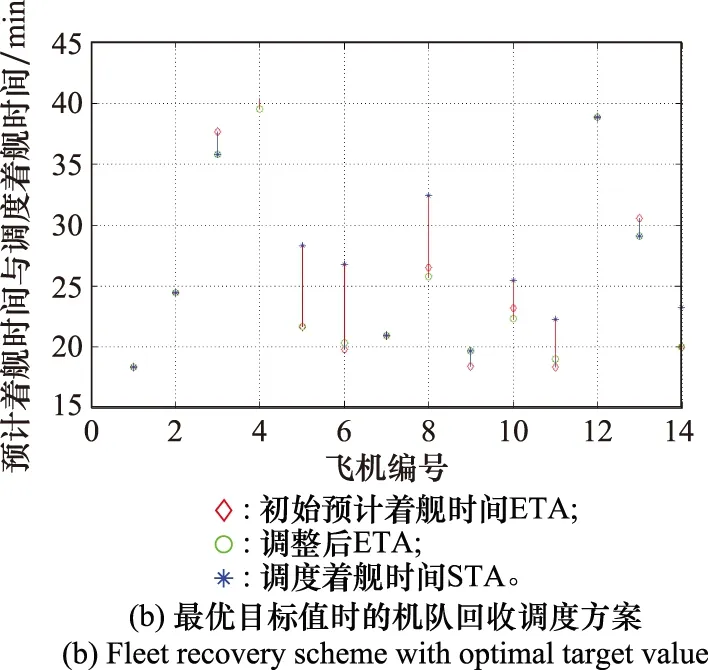
圖7 等待層設置為3架飛機的仿真結果Fig.7 Simulation result of waiting level set to 3 aircraft
單獨分析等待層設置3架或4架飛機情況。隨機規劃迭代結果并非直接收斂到固定值,而是收斂在一定范圍內且呈統計規律,兩者結果基本相似,尤其是Z1子目標時間窗目標值圍繞N(24.42, 0.05)呈現顯著正態特性,Z2、Z3子目標也具有該特點;兩者最優系數迭代均值的散布規律也相同;二者最優目標值回收調度方案有差異,但是目標值相當,飛機總等待時間均約為29.13 min。
通過仿真對比二者。對于機隊規模為14架的回收調度,在目標最優值、指標系數以及調度結果看二者調度結果差別不大,每個等待層設置4架飛機最終調度結果的總體效果略好于設置3架飛機情況。然而當機隊規模不大時,選擇等待層設置為4架飛機明顯好于3架飛機。因為進入等待圈層時,需要進行尾流間隔調整。這會導致等待延遲,帶來燃油量增大,此外,尾流間隔的調整同時也涉及速度調整從而偏離經濟航速導致燃油量的增多。
4.2 基于初始值的回收調度模擬實驗
在同第4.1節相同的回收初始輸入下,選擇等待層設置4架飛機,指標系數設定值是基于指標系數優化值散布的均值來進行模擬回收調度實驗。
4.2.1 著艦成功率為0.9的回收模擬
(1) 子目標值正態性檢驗。在最初進行的110次回收模擬調度中有29次為未發生飛機復飛逃逸情況,通過對其著艦時間窗的的殘差和正態性分析表明,在0.05置信水平下,時間窗子目標的數據顯著地來自正態分布總體。
其殘差與正態性檢驗如圖8所示。從無復飛情況下的時間窗子目標結果看,在所設定的指標函數系數下,隨機擾動因素對仿真結果影響甚小,目標值殘差散布小。即指標函數系數具有較好地適應性和評估穩定性,可較好完成飛機態勢信息評估,并實現機隊回收優化調度。
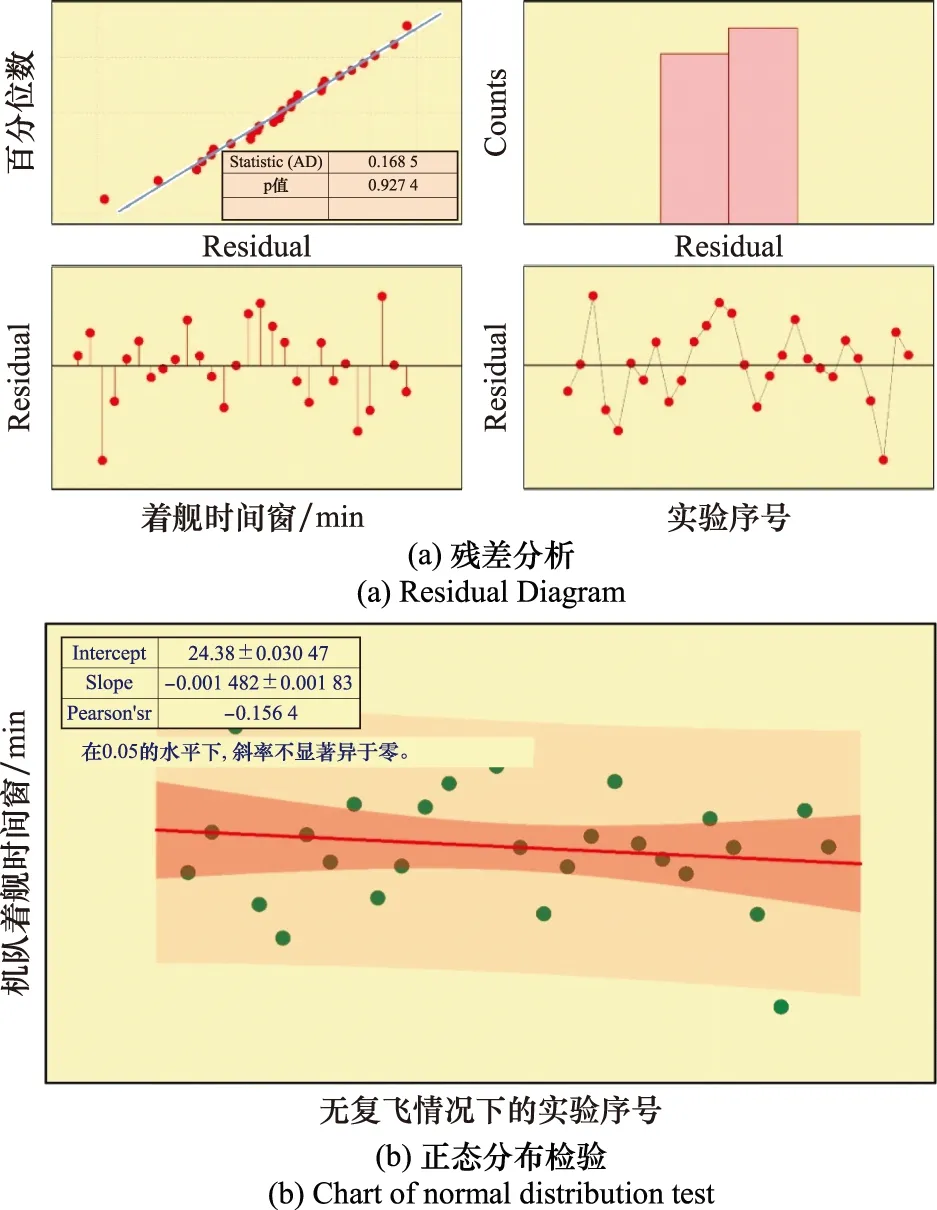
圖8 無復飛時著艦時間窗的殘差與正態性檢驗Fig.8 Residuals normality test of the landing time window without a missed approach
(2) 連續模擬仿真分析。基于上述指標函數系數分析,著艦成功率為0.9時對初始機隊輸入進行300次連續模擬回收實驗,發生不同復飛情況的調度及目標值均值情況如表2所示。統計特性表明,機隊回收中發生復飛的概率為0.77,發生兩次以下復飛概率為0.81,其中發生1次復飛概率最大為0.30,每發生一次復飛相當于回收機隊增加一架飛機,平均時間窗目標值、總等待時間隨著復飛次數的增加而增大,每增加1次復飛情況時間窗平均增加2.5 min,總目標值在復飛次數不多時按復飛次數平均增加4。然而由于發生5~6次復飛概率較低,其樣本統計規律不顯著,且其結果與初始機隊信息關聯較大。

表2 著艦成功率0.9機隊回收的模擬調度實驗
(3)隨機模擬調度實驗。隨機規劃優化具有統計特性,然而對于甲板調度員而言,需要算法快速生成不同調度方案然后基于啟發式經驗選擇綜合滿意度最高的方案,即MC-DE算法輔助決策功能的檢驗。指標參數的搜索基于第4.1節獲得,其在統計意義下具有一般性。綜上,開展無復飛、1~3次復飛情況下的隨機模擬調度仿真,生成相應回收調度方案,結果如表3所示。表中發生復飛飛機編號用下劃線表示,隨著復飛飛機發生次數的增加,盤旋圈數增多,相應著艦時間窗也增大,但并不呈現線性關系。復飛生成是基于MC模擬,具有隨機性,貼近真實著艦問題。結果表明,隨機單次模擬包含在統計特性中,調度方案的目標值較優、滿足相關約束,既符合實際情況,又能提供實時輔助決策建議。
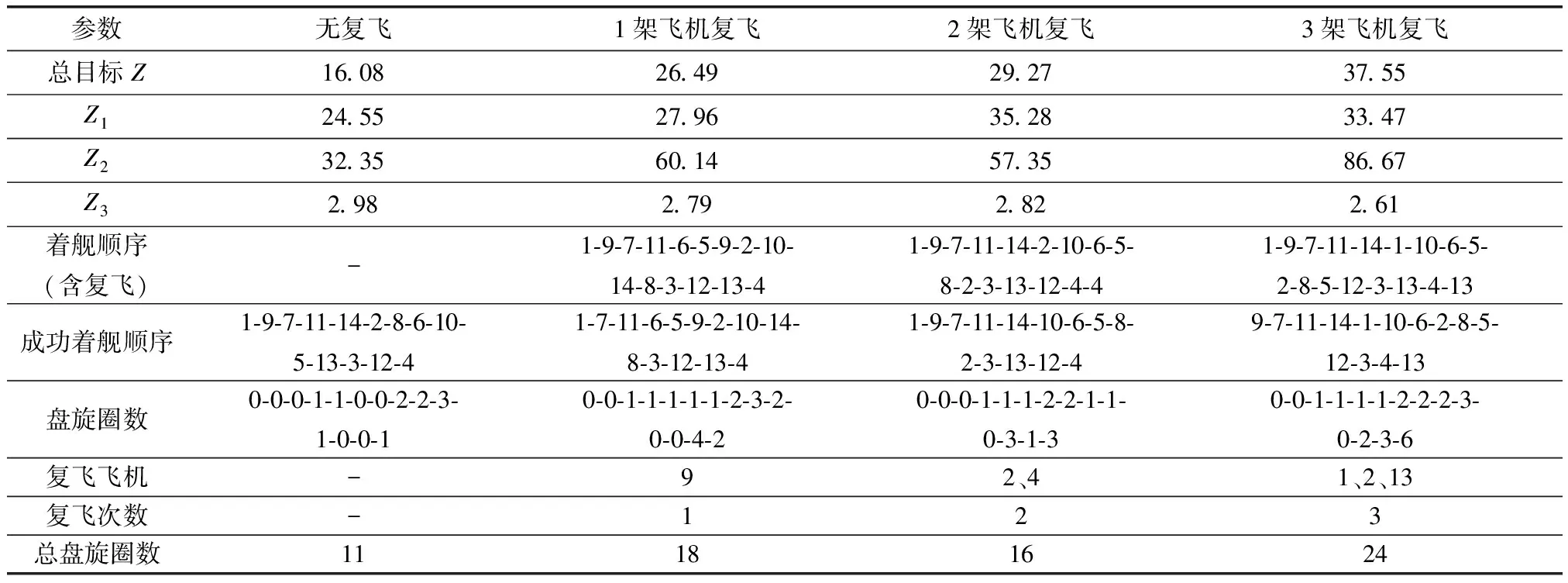
表3 隨機模擬方案生成Table 3 Random simulation scheduling scheme generation
4.2.2 著艦成功率為0.95的回收模擬
模擬仿真條件同第4.2.1節,改變著艦成功率為0.95(即著艦水平提高后),同樣也進行300次回收著艦的模擬調度實驗,結果如表4所示。

表4 著艦成功率0.95機隊回收的模擬調度實驗Table 4 Simulated scheduling experiment with landing success rate 0.95
實驗表明,與表2相比,提高著艦成功率后飛機復飛發生最多4次而非6次,且無復飛情況的概率最大為0.44,至多發生2次復飛的概率為0.95,遠高于表2的0.81。模擬實驗的其他目標值散布也具有統計學特性,可用來指導評估調度方案,其目標值散布如圖9所示。
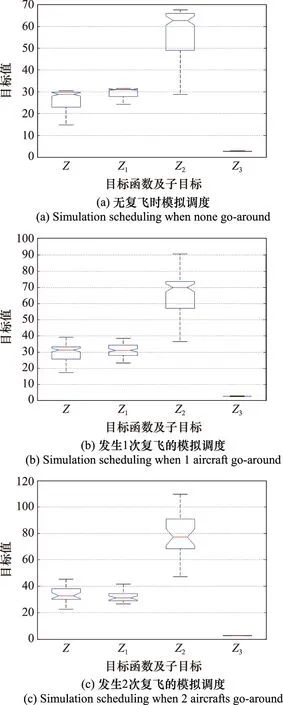

圖9 不同復飛情況下目標值的散布Fig.9 Dispersion of target value in different go-around situations
4.3 基于隨機初始值的模擬調度分析
4.3.1 不同初始輸入下指標系數的散布分析
前面的實驗分析是基于相同初始信息進行,若初始輸入為滿足仿真條件的隨機分布值,選用等待層設置4架飛機,著艦成功概率為0.95,其他參數同第4.1節并進行MC-DE算法仿真。經過500次的模擬優化計算,并對每次模擬得到的λ指標系數優化值的均值進行散布分析,其散布情況如圖10所示。結果表明,改變初始輸入信息,對飛機回收態勢評估函數的系數優化值基本相同,散布較小,即得到的評估函數系數進行回收調度具有一般性,調度的優先序評估中可選擇優化值均值進行。
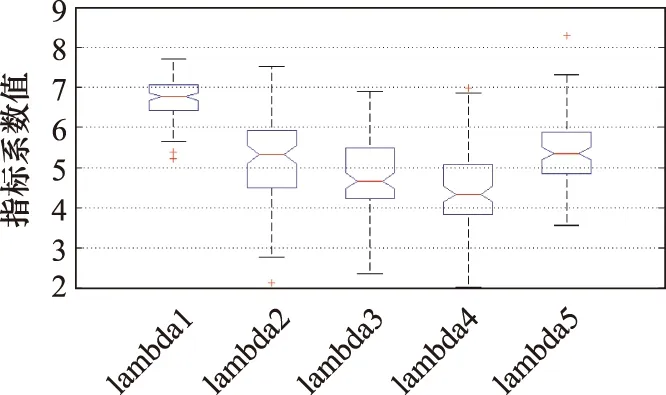
圖10 不同初始輸入下最優化指標系數值的散布Fig.10 Dispersion of the optimization index coefficients in different initial input
4.3.2 不同初始輸入下回收調度實驗分析
其他仿真條件同第4.3.1節,種群大小為100,迭代次數為5 000代,進行MC-DE算法實驗,目標函數散布情況如圖11所示。結果表明,隨機輸入下,最優目標值散布小、呈現微小偏度的正態特性,其時間窗子目標基本穩定在23 min、總等待時間約為32.5 min,該仿真最優結果是無復飛情況下所得到的。指標系數優化值均值為[6.86, 5.32, 4.69, 4.38, 5.41],已在第4.3.1節分析。綜上,不同輸入條件下算法最優結果的小散布特性,說明算法的魯棒性較強,指標系數的適應能力較好、通用性較強。
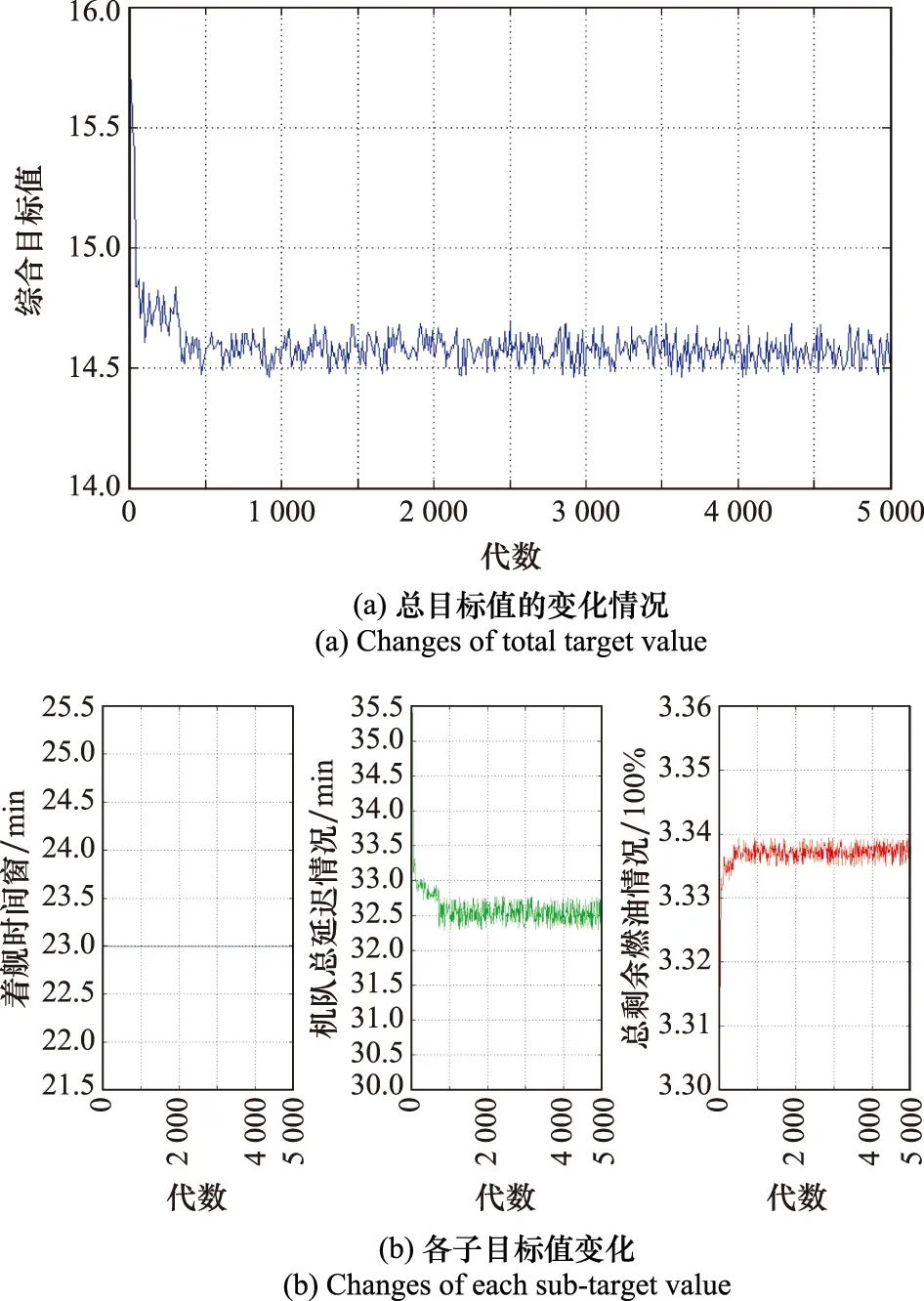
圖11 不同初始輸入下各目標值散布情況Fig.11 Dispersion of each target value in different initial values
5 結 論
機隊回收調度研究基于進場與著艦飛行合理假設,考慮尾流間隔調整、盤旋時間隨機攝動性以及復飛、飛機故障等隨機因素,研究了機隊在等待層設置不同飛機、著艦成功率不同情況下回收調度優化問題,具有較強的魯棒性、適應性。
(1) 通過對相同初始輸入下MC-DE算法仿真分析,表明隨機規劃模型的目標值具有較強的統計特性,最優目標值收斂在一定范圍內。通過對不同初始輸入的仿真,表明指標系數優化值散布不大,利用指標系數均值進行回收模擬調度,印證了算法的模擬性、實時性及通用性。
(2) 在回收機隊規模較大時,等待層設置4架飛機的目標優化結果略好于設置3架飛機。而機隊規模較小時,等待層設置飛機數越小越好。
(3) 不論仿真初值固定或是按仿真條件所服從的指數分布隨機生成,實驗表明,無復飛情況下機隊著艦時間窗相差不多,約為23~24 min,且其值呈顯著正態特性。當然,若發生復飛,各種隨機情況差別較大,其目標值的研究不具有明顯統計特性。
(4) 著艦成功率的不同,不直接影響目標值,但在300次模擬調度實驗中,對復飛發生次數概率影響較大,提高該值,可以顯著降低飛機復飛發生次數。
(5) 機隊回收調度,在小規模調度情況下,人工調度容易控制,但隨著回收機隊規模增多,自動規劃算法將較好地提供調度員輔助決策方案,尤其是發生艦載機復飛時,算法的實時規劃將提高機隊回收作業優化調度能力。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·七年級數學人教版(2022年11期)2022-02-14 07:14:12
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
科普童話·學霸日記(2020年1期)2020-05-08 16:45:11
當代陜西(2019年11期)2019-06-24 03:40:28
小天使·一年級語數英綜合(2019年2期)2019-01-10 11:57:30
兒童繪本(2018年5期)2018-04-12 16:45:32