基于機載式激光雷達的偏航校正功率曲線優(yōu)化探討
2021-11-18 11:00:22章立棟
探索科學(xué)(學(xué)術(shù)版) 2021年11期
章立棟
文大光電科技(上海)有限公司 上海 200131
引言
大自然的風向?qū)崟r變化的,風力發(fā)電機屬于大慣性設(shè)備以及偏航對風速度的限制,控制系統(tǒng)并不要求實時跟隨風向變化,只需要保持風機偏航誤差在設(shè)定范圍內(nèi)運行即可,因此本文是討論穩(wěn)態(tài)運行的偏航誤差。偏航誤差引起一系列的問題,比如功率曲線不達標,尾流的損失,系統(tǒng)過載等等。文中采用機載式多普勒激光雷達檢測偏航誤差,通過交替校正的方式,評估偏航誤差對功率曲線的影響,減少評估計算的不確定性。
1 偏航誤差產(chǎn)生的原因和功率損失
機械式或者超聲波式風向儀都安裝的風力發(fā)電機機艙尾部的上方,受到風輪順時針方向旋轉(zhuǎn)的擾動,測量的風向與前方實際風向存在偏差;其次在安裝過程中,非常容易滑動風向標的零刻度線;再次,風機輪轂罩,機艙罩以及微觀選址對來流的影響。因此傳統(tǒng)的風向儀不能正確測量風機偏航誤差。
穩(wěn)態(tài)風速下的風機功率P計算如公式(1)所示,其中ρ空氣密度,A風輪面積,V穩(wěn)態(tài)風速,C p風能利用系數(shù)。其中風速V方向正對風輪平面軸線,夾角為0度。

2 測量原理
機載式多普勒激光測風雷達安裝在機艙罩頂部的后方,測量風輪前方氣溶膠微粒相對于激光束方向的運動速度,然后通過矢量合成風速和風向,圖1是以丹麥Windar Photonics A/S公司的2光束產(chǎn)品WindEYE[2]為例介紹偏航誤差的測量原理。
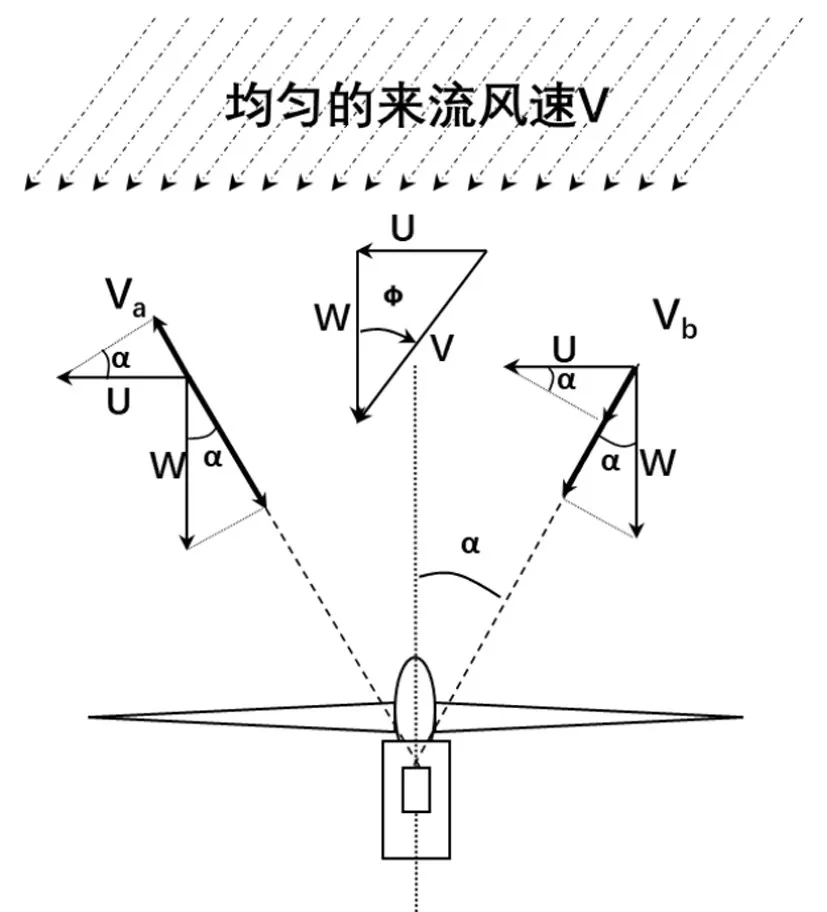
圖1 WindEYE風速風向重構(gòu)
設(shè)定風輪前方是均勻的來流風速V,與風輪軸線的夾角為Φ,可以分解為切向風速U和軸向風速W,光束半開角為α=30°,左右光束的測量風速分別為V a和V b,以順時針方向為風向的正方向,來流風速V方向與機艙的夾角為Φ>0,則

通過公式(2),(3)可以求出軸向和切向風速分量,并重構(gòu)來流風速和風向:

3 校正方法
偏航誤差校正可以分為靜態(tài)和動態(tài)校正。靜態(tài)校正是用激光雷達檢測到的偏航誤差θ去修改主控系統(tǒng)為風向標初始安裝預(yù)留的θoffset參數(shù),讓θoffset=θ實現(xiàn)。校正完畢后拆除激光雷達,挪到下一臺風機再使用,提高激光雷達的使用效率。動態(tài)校正是始終需要雷達集成到風機偏航控制系統(tǒng)中,實現(xiàn)對風控制。
由于激光雷達測風設(shè)備價格較高,不同風機存在的偏航誤差情況也各不相同,采用的校正方法有所不同,具體情況處理如下:
情況1:平均值小,離散性大,采用動態(tài)校正。
情況2:平均值和離散性都大,采用動態(tài)校正,靜態(tài)校正效果不夠好。
情況3:平均值大,離散性小,采用靜態(tài)校正。
情況4:平均值和離散性都小,無需校正。
針對風電場業(yè)主無權(quán)限修改偏航控制邏輯,Wind EYE產(chǎn)品[2]的Wind TIMIZER模塊可以無縫接入風機主控系統(tǒng),自動切換輸入主控系統(tǒng)的信號為風速風向儀或激光雷達測風信號,并通過內(nèi)部算法優(yōu)化偏航誤差的平均值和離散性。
4 交替校正
國內(nèi)幾乎所有風電場業(yè)主都要求根據(jù)SCADA系統(tǒng)記錄的功率曲線評估偏航誤差校正后的效果。按照IEC61400-12-2標準[3]進行功率曲線驗證,其不確定性超過15%[1],采用前測量后校正的方式驗證功率曲線優(yōu)化效果,結(jié)果容易淹沒在15%的不確定性誤差范圍內(nèi)。為盡可能減少測量不確定性,根據(jù)Van Der Hoven風速功率譜特性[4],風速10分鐘至2小時期間的頻譜基本是水平分布,所以采用間隔一個小時交替校正的方法進行驗證,圖2的 Wind TIMIZER模塊相當于一個軟件開關(guān),可自動切換。

圖2 Wind TIMIZER模塊接線示意圖
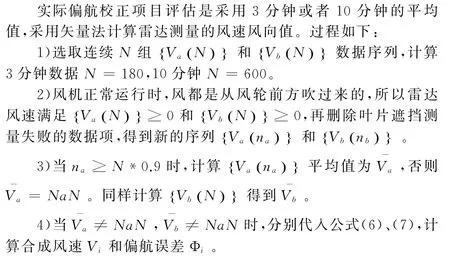
具體交替校正項目數(shù)據(jù)處理過程如下:
(1)按照本文第2節(jié)的方法計算10min的平均數(shù)據(jù),數(shù)據(jù)項包括時間戳,雷達風速,偏航誤差,校正狀態(tài)。
(2)與SCADA數(shù)據(jù)進行時間同步,刪除風機停機和尾流扇區(qū)的數(shù)據(jù)項。
(3)刪除每次切換后的第一個10min數(shù)據(jù)。
(4)由校正狀態(tài)將數(shù)據(jù)分為檢測組和校正組。
(5)根據(jù)IEC61400-12-2標準[3]的Bin方法,計算檢測和校正組功率曲線 {VBin,P Bin} 。
(6)接合測試風電場的威布爾分布 {PDF Bin},按照公式(8)計算年發(fā)電量AEP,公式(9)計算校正后的年發(fā)電量提升效果η。

V cut-in切入風速,V cut-out切出風速,P Bin,i第i個V Bin風速對應(yīng)的功率,PDF Bin,i第i個V Bin風速對應(yīng)的威布爾分布概率。

AEP校正和AEP檢測分別是校正和檢測組的年發(fā)電量。
5 實際案例
文大光電科技(上海)有限公司在江蘇國家電投新能源公司下屬的7個風電場開展為期一年的偏航校正業(yè)務(wù),其中包括3種地理環(huán)境,3個廠家的6種型號的風機產(chǎn)品,安裝14臺Wind EYE激光雷達設(shè)備,通過Wind TIMIZER模塊進行動態(tài)偏航校正。2020年9月至12月,雷達安裝,調(diào)試,收集數(shù)據(jù)。2021年1月至8月,開啟間隔一個小時的交替校正,驗證功率曲線優(yōu)化效果。2021年9月開始,激活全時段動態(tài)校正功能。
風機按照額定功率與風輪直徑分類,測試結(jié)果如表1所示,包括基于雷達風速和風速儀風速進行年發(fā)電量AEP的評估結(jié)果。

表1 交替偏航誤差動態(tài)校正結(jié)果數(shù)據(jù)對比
(*)7#和9#風機為本項目前就完成靜態(tài)偏航校正。
根據(jù)表1可以得出如下結(jié)論:
a)所有風機的平均偏航誤差由校正前的5.6度降為1.0度,離散性也由3.3度降為2.7度。Wind TIMIZER模塊確實在沒有修改主控偏航控制邏輯或者參數(shù)的前提下校正風機的偏航誤差。
b)若以3度偏航誤差角為界,超過60%的風機需要校正。若包括兩臺事先做過靜態(tài)校正的風機,則超過70%。
c)同型號風機的平均偏航誤差并不一樣。
d)陸上風場的不同風機的平均偏航誤差離散性很大。
e)海上風機動態(tài)校正后離散性明顯降低,年發(fā)電量提升效果明顯。
f)序號5~12風機屬于同一廠家,初始偏航誤差和離散性各不相同,校正后,偏航誤差都得到優(yōu)化,但是離散性都沒有明顯變化。原因是這4種機組采用相同的偏航控制策略。
g)序號13,14機組與序號5~12機組不是同廠家的機型產(chǎn)品,但是校正后偏航離散性結(jié)果類似,故推斷其偏航控制策略也是相近的。
h)若動態(tài)校正沒有使其離散性得到明顯改善,則只需要靜態(tài)校正即可。
i)按照公式(8)(9)分別計算基于雷達與風速儀風速的年發(fā)電量提升百分比,差異很大。原因詳見本文6.1節(jié)內(nèi)容。
6 問題討論
6.1 機艙風速儀風速測量變化 14臺測試風機動態(tài)偏航校正前后,機艙風速儀的測量值與雷達風速測量值之間的關(guān)系都發(fā)生不同程度的變化。按照最小二乘法擬合機艙傳遞函數(shù)y=ax+b,x為機艙風速儀測量值,y為雷達測量值,校正后所有測試風機的斜率a都變大。盡管機型和安裝地點不同,但趨勢一致,偏航誤差越大,校正后機艙風速儀風速變小就越多。
由于激光雷達在偏航校正前后,測量的都是風輪前方的風速,而機艙風速儀測量值發(fā)生變化,故建議采用雷達測量風速評估偏航校正前后的功率曲線優(yōu)化和發(fā)電量提升,減少不確定性。
6.2 偏航誤差與年發(fā)電量關(guān)系 圖3是14臺測試風機動態(tài)偏航校正后年發(fā)電量提升比例與不同的余弦關(guān)系,在穩(wěn)態(tài)偏航誤差絕對值小于12度的時候,不管采用雷達測量風速,還是采用風速儀風速進行年發(fā)電量提升評估,其結(jié)果都是大于[1-cos(θ)3]關(guān)系。在實際項目中,檢測到穩(wěn)態(tài)偏航誤差后,可以直接采用 [1-cos(θ)3]關(guān)系粗略估計潛在的年發(fā)電量提升,相比Ris?-R-1330(EN)[1]報告中指出的 [1-(cosθ)2]提升關(guān)系,采用Wind TIMIZER動態(tài)偏航校正的效果更好。

圖3 動態(tài)偏航誤差與年發(fā)電量提升關(guān)系
7 總結(jié)
激光雷達檢測風力發(fā)電機的偏航誤差是真實存在的;通過動態(tài)偏航校正,能夠優(yōu)化風機的偏航誤差值;同時優(yōu)化功率曲線,提高年發(fā)電量;采用交替校正的方式,所有測試風機都得到較好的評估結(jié)果。
不同風機進行動態(tài)偏航校正,其偏航離散性的改變有不同的表現(xiàn),需要進一步協(xié)同風機主控策略廠家,進行深入探討。
猜你喜歡
電機與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
西南交通大學(xué)學(xué)報(2016年4期)2016-06-15 20:29:37
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應(yīng)用(2015年7期)2015-03-01 03:50:15