高速風洞級間分離軌跡模擬試驗技術
2021-11-19 07:25:24錢豐學劉奇王元靖易國慶
實驗流體力學 2021年5期
關鍵詞:模型
錢豐學,郭 鵬,高 鵬,劉奇,王元靖,易國慶
中國空氣動力研究與發展中心 高速空氣動力研究所,四川 綿陽 621000
0 引言
級間分離是多級航天器發射過程中的關鍵一環,在整個系統的飛行安全和軌跡控制中占據十分重要的地位。早在20 世紀50年代,英美等國即針對這一問題進行了大量研究,發展了包括動力投放、網格測力在內的多種風洞試驗技術和數值模擬技術,用于導彈級間分離[1]、航天飛機燃料箱投放分離[2]、多級入軌飛行器級間分離等問題的分析。
級間分離過程中,飛行器流場存在相互干擾,具有較強的非線性和非定常特性,而干擾作用下的飛行器氣動特性難以精確預測,導致級間分離階段成為航天事故的多發階段之一。據統計,在1980~1999年全球發生的114 起航天事故中,因級間分離故障導致的有11 起,占比接近10%。
進入21 世紀以后,以非對稱布局及帶翼并聯布局[3-4]為代表的新概念飛行器的出現,給級間分離問題研究帶來了新的挑戰。為了掌握分離過程中飛行器的動態特性和運動規律,設計部門不得不綜合采用多種方法。美國研究人員曾在Hyper-X 項目研究過程中針對X-43A 飛行器的級間分離問題開展了CFD 仿真[5-8]、風洞試驗[9]、彈道仿真計算[10]以及飛行驗證試驗[11],在建立相對完備的氣動數據庫的同時,還開發了基于ADAMS 的分離過程模擬系統SepSim[10]。為解決第二代可重復使用航天器中存在的相同尺度并聯飛行器級間分離干擾問題,國外研究機構不僅發展了基于Cart3D、OVERFLOW 2 的級間分離CFD模擬技術[12-13],還在4.8 m 量級大型跨聲速風洞(NASA Langley 16T)、1.2 m 量級中型超聲速風洞(NASA Unitary Plan Wind Tunnel)和1.0 m 量級高超聲速風洞(Langley 20-Inch Mach 6 Air Tunnel、31-Inch Mach 10 Air Tunnel)中開展了網格測力風洞試驗,得到了不同分離條件下的多體干擾試驗數據[14-15]。此外,為準確評估級間分離過程的安全性和可靠性,國外研究人員在精細化研究方面也開展了大量工作。法國研究人員曾對Ares I 及其驗證飛行器Ares I-X的上面級/一級助推器級間分離進行了深入研究,利用AEDC VKF Tunnel A 的CTS 機構和模型插入機構開展了網格測力試驗,并基于此建立了超過35 000個數據點的高精度試驗數據庫[16]。意大利研究人員對歐洲低軌小衛星運載器VEGA 一級分離過程進行了CFD 模擬,研究了一級分離過程中助推器制動發動機(retro-rockets)羽流對分離特性的影響[17]。即便如此,國外對級間分離問題的研究依然不夠充分,數值仿真精度有待進一步提高,而試驗技術更是存在明顯不足,尤其是目前國外尚沒有一座風洞具備在馬赫數0.4~4.5 范圍開展全速域級間分離軌跡直接模擬的能力。
多級飛行器級間分離問題同樣是國內研究的熱點問題之一,也是當前風洞試驗技術發展的一個重要方向。自20 世紀90年代以來,國內研究人員先后在FD-06 風洞[18]、FL-23 風洞[19-20]和FL-31 風洞[21-23]建立了網格測力試驗技術,在FD-12 風洞[24]建立了級間分離自由飛試驗技術,在FL-23 風洞[25]、FL-24風洞[26]和FL-28 風洞[27]建立了多體分離試驗技術。但是,上述技術在應用中依然存在諸多限制,尤其是難以同時獲得前后級的干擾氣動力和軌跡數據,制約了多體干擾和級間分離研究能力的發展。
本文在FL-23 風洞原有技術的基礎上,對上、下迎角機構進行了改造設計,重新研制了模型姿態控制系統,開發了集常規測力試驗、模型插入試驗、網格測力試驗和軌跡捕獲試驗能力于一體的級間分離試驗系統,實現了級間分離運動軌跡的直接模擬,可以同時獲得前后級的干擾氣動力和軌跡數據,進一步完善了高速風洞級間分離試驗技術體系。
1 數學模型
建立如圖1所示的級間分離過程坐標系。
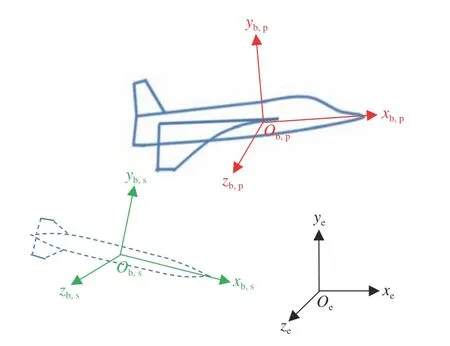
圖1 坐標系定義Fig.1 Stage-separation coordinate systems
圖中,Oexeyeze為地面固定坐標系,ye軸沿當地鉛垂線指向上,xe軸指向飛行方向,ze軸指向依據右手法則確定。Ob,pxb,pyb,pzb,p和Ob,sxb,syb,szb,s分別為原點位于前、后兩級飛行器質心的體軸系,其中,xb軸由質心指向飛行器頭部,yb軸在飛行器縱向平面內指向上方,zb軸指向依據右手法則確定。
將級間分離過程中的兩級飛行器視為剛體,考慮分離過程中飛行器所受的氣動力與發動機推力,將動力學方程在體軸系中表示為:

式中,mi為飛行器質量,t為時間,Vi為飛行器在體軸系中的速度矢量,ωi為飛行器角速度矢量,Fi為主動力矢量,Ii為相對質心的轉動慣量矩陣,Mi為主動力矩矢量。
受風洞機構運動能力限制,FL-23 風洞目前僅能模擬無側滑情況下飛行器在同一縱向平面內的級間分離運動,前、后兩級飛行器均只有3 個自由度,因此需對上述飛行器動力學方程進行簡化:
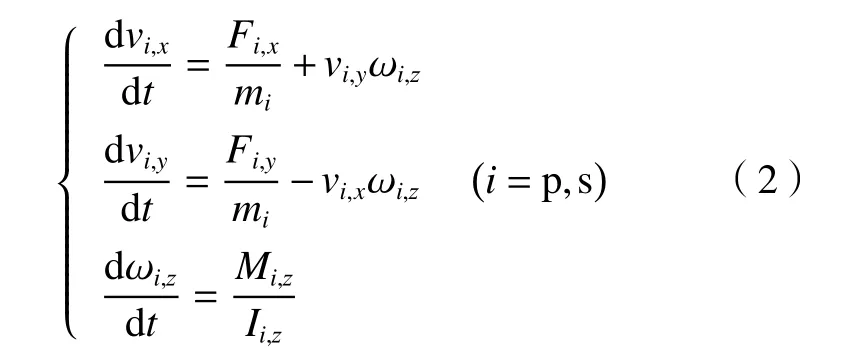
式中,vi,x和vi,y分別為飛行器的x向速度、y向速度在體軸系中的分量,ωi,z為轉動角速度,Fi,x、Fi,y分別為作用于飛行器上的氣動力、重力、推力等的合力沿體軸系的分量,Mi,z為飛行器所受俯仰力矩。
級間分離過程中的兩級飛行器運動學方程為:

式中,xi、yi分別為飛行器在地面固定坐標系中沿xe軸、ye軸方向的位移,θi為飛行器俯仰角。
風洞環境的另一限制是同一時間僅能模擬飛行器單一迎角。在級間分離試驗中,當以前級迎角進行模擬時,需將后級迎角表示為相對前級迎角的形式:
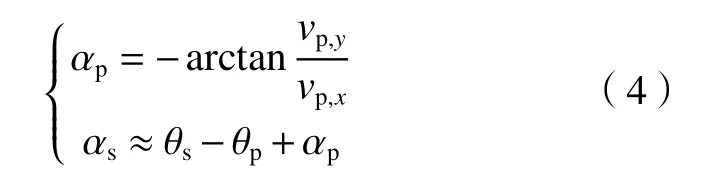
式中,αp、αs分別為前級、后級飛行器迎角,θp、θs分別為前級、后級飛行器俯仰角,vp,x、vp,y分別為前級飛行器的x向、y向速度在體軸系中的分量。
2 試驗風洞與裝置
2.1 風洞
FL-23 風洞是一座馬赫數范圍0.4~4.5 的三聲速風洞(如圖2所示),具有模型區長、迎角范圍大、試驗馬赫數范圍寬等優點,是開展航天飛行器跨超聲速級間分離試驗的理想設備。

圖2 FL-23 三聲速風洞Fig.2 FL-23 sub-tran-supersonic wind tunnel
風洞試驗段長4.5 m,截面尺寸為0.6 m×0.6 m,同時具備上迎角機構和下迎角機構。上迎角機構迎角運行范圍為–15°~15°,x向行程為0~200 mm;下迎角機構迎角運行范圍為–11°~49°,具有x向、y向運動自由度,其中,x向行程0~680 mm,y向行程0~507 mm。通過兩套機構相互配合,可實現級間分離過程中前級、后級相對姿態和位置的模擬。
2.2 機電系統
FL-23 風洞級間分離試驗系統主要由前級模型、后級模型、上驅動機構(含上迎角機構、上α電機、上x電機、上驅動器)、下驅動機構(含下迎角機構、下α電機、下x電機、下y電機、下驅動器)和級間分離控制計算機組成,形成上下兩套具有獨立驅動和協同運動能力的子系統,其結構如圖3所示。
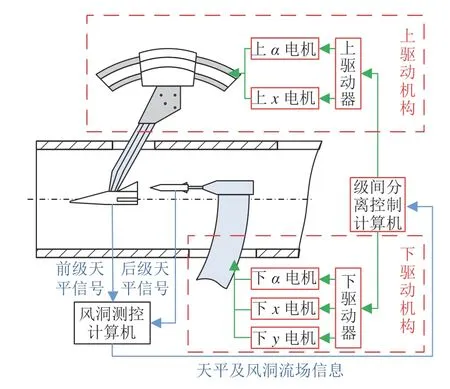
圖3 FL-23 風洞級間分離試驗系統結構圖Fig.3 Stage-separation test system in FL-23 wind tunnel
前級模型通過前級天平、支桿與上迎角機構相連,構成飛行器前級模型運動機械系統;再通過電纜將上驅動器與上α電機、上x電機和級間分離控制計算機相連,形成飛行器前級模型運動驅動與控制系統。飛行器前級模型運動機械系統、運動驅動與控制系統構成了飛行器前級模型運動系統,能夠實時測量前級模型氣動力,并實現前級模型的迎角、x向位移變化。
后級模型通過后級天平、支桿與下迎角機構相連,構成飛行器后級模型運動機械系統;再通過電纜將下驅動器與下α電機、下x電機、下y電機和級間分離控制計算機相連,形成飛行器后級模型運動驅動與控制系統。飛行器后級模型運動機械系統、運動驅動與控制系統構成了飛行器后級模型運動系統,能夠實時測量后級模型氣動力,實現后級模型的迎角、x向位移、y向位移的變化。
2.3 控制系統
控制系統是整個級間分離試驗系統的核心,包括風洞測控計算機、級間分離控制計算機、移動控制面板、現場運動控制器和電機驅動部分。控制系統的空間網絡拓撲結構如圖4所示。

圖4 控制系統結構拓撲圖Fig.4 Stage-separation test control system
控制系統網絡配置包括工業以太網、Profibus-DP總線、Profibus-DP Drive 總線等3 種類型。風洞測控計算機、級間分離控制計算機和現場運動控制器通過工業以太網連接;移動控制面板和現場運動控制器通過Profibus-DP 總線連接;現場運動控制器和上下驅動機構通過Profibus-DP Drive 總線連接。
在試驗準備及進行過程中,風洞測控計算機向級間分離控制計算機下達上下迎角機構上α,上x,下α,下x、y驅動器使能,電機抱閘,單動定位和多軸聯動控制指令,下傳天平數據供運動軌跡計算使用;同時接收級間分離控制計算機上傳的上下迎角機構位置和速度參數,上下電機、驅動器和現場運動控制器工作狀態,上下迎角機構定位完成情況等信息。
級間分離控制計算機是提供上下驅動機構驅動器使能、電機抱閘、單動定位、多軸聯動控制、各軸位置和速度、驅動器故障狀態顯示的人機交互界面。在試驗準備階段,操作人員通過該計算機下達各軸單動控制指令,將上下迎角機構各軸定位至試驗初始位置;在軌跡試驗過程中,接收風洞測控計算機傳送的天平數據,根據上下迎角機構當前位置信息和天平數據計算各軸下一目標位置,并下傳至現場運動控制器。
現場運動控制器根據級間分離控制計算機下達的控制指令完成各軸驅動器使能、電機抱閘、單動定位和多軸聯動控制,并根據目標位置完成運動軌跡規劃以避免模型運動過程中發生碰撞;同時,將上下迎角機構的位置、速度、限位和故障狀態等信息通過Profibus-DP Drive 總線上傳至級間分離控制計算機。
上下驅動機構的控制系統部分主要包括進線電抗器、進線濾波器、5 個自由度的伺服驅動器及其伺服電機等,在現場運動控制器控制下完成各軸高精度定位控制,其中,上x、上α、下x、下α定位位置信息直接來源于電機自帶絕對編碼器,y向位置信息來源于磁致位移傳感器。
移動控制面板帶觸摸屏,功能鍵,使能、急停按鈕以及手輪。在維護、調試和試驗準備階段,操作人員將移動控制面板使能后,可以通過觸摸屏直接向現場運動控制器下達上下迎角機構各軸點動、單動、聯動控制指令,也可通過功能鍵選定軸,通過轉動手輪控制相應軸運動。
2.4 試驗流程
級間分離試驗流程如圖5所示。

圖5 級間分離試驗流程圖Fig.5 Stage-separation test flow chart
1)系統連接與風洞啟動。準備試驗參數,包括模型氣動力試驗參數,飛行器前后級的質量、慣性矩與慣性積參數,飛行器分離初始條件參數,試驗終止模式條件以及軌跡模擬時間間隔;預置前、后級模型風洞啟動關車姿態和位置;啟動風洞,建立穩定流場;前級模型調節至分離過程的初始姿態,后級模型調節至初始姿態和初始位置;賦予時間變量計數為初始時刻。
2)模型氣動力測量。模型到達給定姿態和位置,判斷流場穩定后,通過天平分別測量前、后級模型氣動載荷,采用風洞常規測力試驗數據處理方法進行測量數據修正和無量綱化處理,獲得前、后級模型氣動力系數。
3)兩級飛行器位置與姿態計算。依據當前時刻對應的飛行條件和前后級模型測量得到的氣動力系數模型、大氣模型、推力模型和重力模型,計算作用于真實前后級飛行器上的體軸系氣動力、體軸系推力和體軸系重力,獲得飛行器前、后級上的合力和力矩。最后,通過動力學方程和運動學方程求解得到下一時刻真實前后級飛行器的動力學特性參數和位置姿態信息。
4)分離邏輯判斷。依據上一步計算結果,判斷下一時刻飛行器前、后級是否出現分離失敗故障(前、后級發生碰撞,或者前、后級進入另一方的拒絕區域)或者是否滿足安全分離條件(前、后級已經進入另一方的安全區域),若是,則試驗停止,反之繼續進行試驗。
5)前、后級模型姿態和位置調節。通過對比當前時刻與下一時刻飛行器位置與姿態信息,獲得前、后級模型從當前時刻狀態過渡到下一時刻狀態所需的姿態變化向量和后級模型平移運動向量,同時計算模型質心附加位移補償量,之后依據后級模型平移運動向量以及前、后級模型姿態調整補償向量關系,獲得后級模型總平動向量,再由級間分離控制計算機向現場運動控制器發出姿態調節命令,將前、后級模型的姿態和后級模型的位置變換到下一時刻的目標值。
6)試驗結束,模型狀態回零。輸出試驗結果,將后級模型位置調節至預設的風洞啟動關車位置,將前、后級模型姿態置零,然后向風洞測控計算機發出關車指令,試驗結束。
3 試驗結果與分析
高速風洞級間分離軌跡模擬系統建設完成后,針對某飛行器彈艙內部載荷拋撒過程進行了網格測力試驗和軌跡捕獲試驗,以驗證系統的可行性。為表述方便,以下將前級模型簡稱為“前級”,后級模型簡稱為“后級”。試驗中,前級為上下不對稱升力體布局,后級為尾身組合體布局,模型縮比均為1∶9。分離前,后級位于前級彈艙內部。圖6 為級間分離過程示意圖。
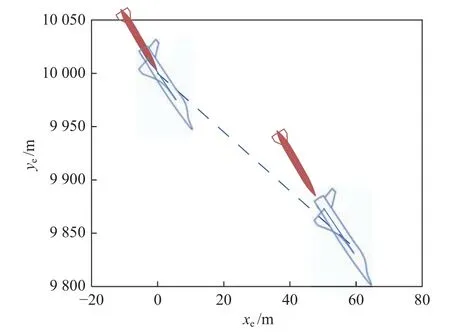
圖6 級間分離過程示意圖Fig.6 Diagram of stage-separation process
3.1 網格測力試驗
網格測力試驗主要研究了Ma= 3.0、前級迎角分別為0°和5°、后級迎角為0°時前級對后方不同位置后級氣動特性的影響。
圖7 為前級迎角αp= 0°、兩級質心y向距離在–34~30 mm 范圍、x向距離在–30~630 mm 范圍變化時的后級網格測力試驗結果。從圖中可以看出,分離后的后級氣動力與自由流狀態存在明顯差異。尤其從圖7(a)可以看出,后級軸向力系數CA較自由流狀態明顯減小,隨著x向距離增大,前級對后級的影響減弱,CA逐漸向自由流結果逼近。與之相比,前級對后級法向力系數CN的影響情況更為復雜,從圖7(b)可以看出:當Δy>0(后級位于前級軸線上方)時,CN隨x向距離增大呈增大趨勢,且在x向距離大于350 mm 之后大于自由流結果;而當Δy≤0(后級軸線位于前級軸線下方)時,CN隨x向距離增大呈減小趨勢,且在x向距離大于150 mm 后小于自由流結果。在圖7(c)中,俯仰力矩系數Cm隨x向距離的變化趨勢則與法向力系數CN相反:當Δy>0 時,Cm隨x向距離的增大逐漸減小;當Δy≤0 時,Cm隨x向距離的增大先增大后減小,且在x向距離大于50 mm之后大于自由流結果。
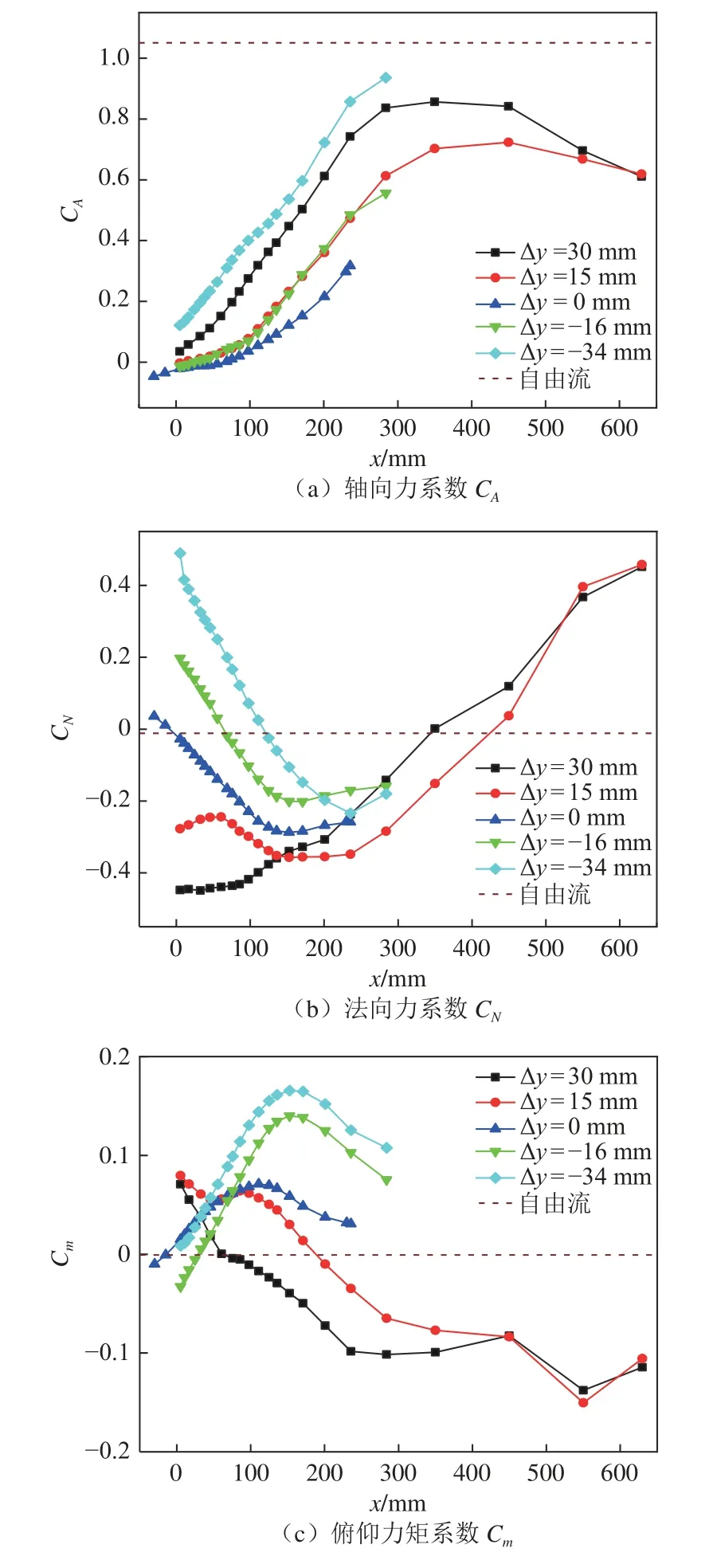
圖7 網格測力試驗結果(αp=0°)Fig.7 Grid test results(αp=0°)
圖8 為前級迎角αp= 5°、兩級質心y向距離在–16~18 mm 范圍、x向距離在0~630 mm 范圍變化時的后級網格測力試驗結果。與圖7 對比可以看出,前級迎角變化會對后級氣動載荷產生顯著影響:當x向距離相同時,圖8(a)中CA明顯較圖7(a)中偏大;但圖8(b)中CN及圖8(c)中Cm的變化規律則與圖7 中的對應結果相似。從圖8(b)和(c)還可以看出,在試驗條件范圍內,CN與Cm均會受到前級影響。以CN為例,當x向距離小于400 mm 時,CN均小于自由流結果,大于500 mm 之后則大于自由流結果。
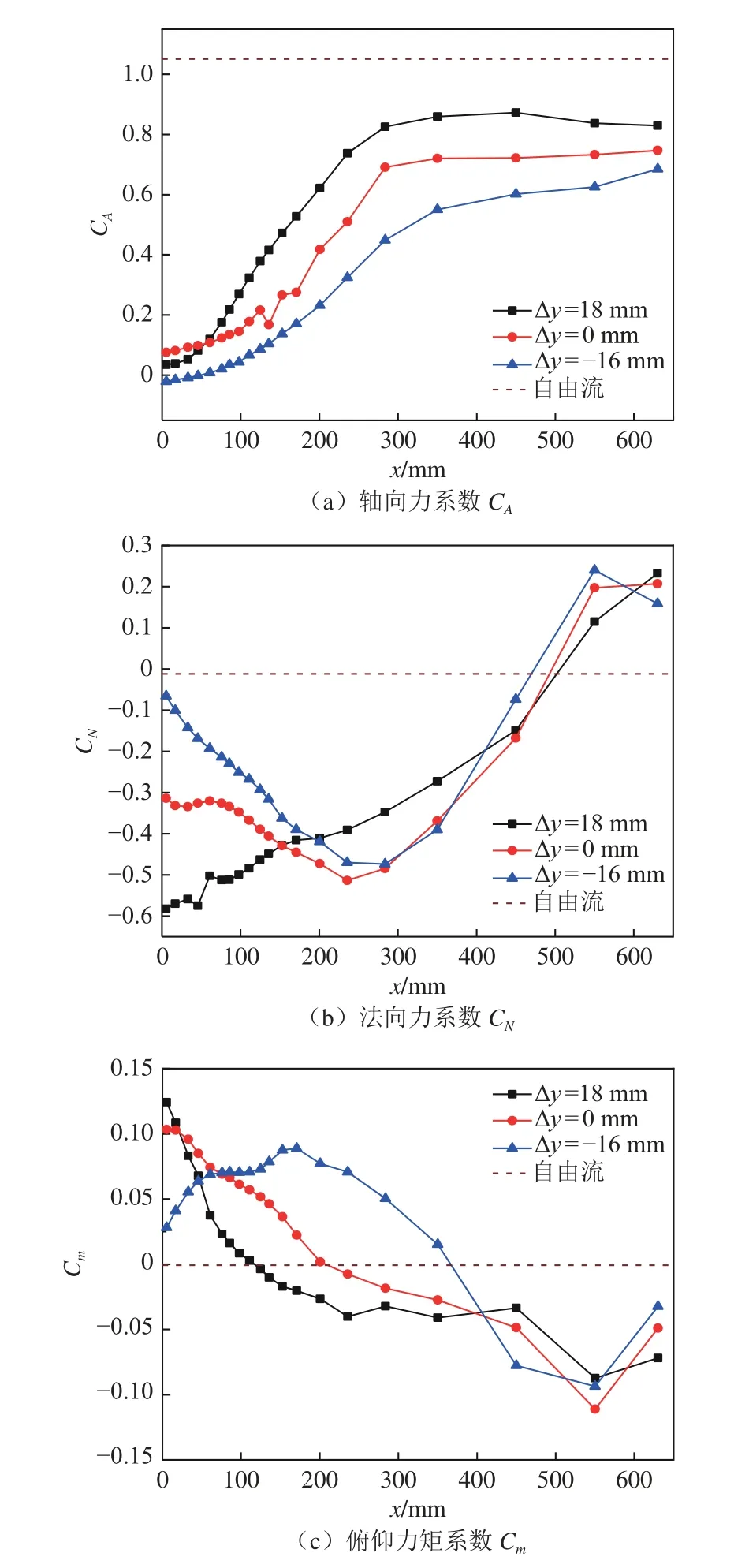
圖8 網格測力試驗結果(αp=5°)Fig.8 Grid test results(αp=5°)
3.2 軌跡捕獲試驗
軌跡捕獲試驗主要模擬前級向下俯沖并從艙內拋出后級的過程。軌跡捕獲試驗中前級、后級縮比前的質量和繞自身zb軸的轉動慣量如表1所示,表2為分離初始條件。試驗時,步長設置為0.01 s,試驗結束條件為運行到風洞機構極限位置或兩級模型質心距離相對初始時刻的變化值達到0.915 m 的安全距離。

表1 飛行器質量特性Table 1 Mass properties of aircrafts

表2 分離初始條件Table 2 Initial conditions of stage separation
圖9 為軌跡捕獲試驗主要結果(Δd為總距離)。可以看到:分離后,后級在氣動力作用下逐漸遠離前級,兩者距離不斷增大(圖9(a))。分離過程中,后級迎角不斷增大,出現抬頭趨勢,試驗結束時迎角約為5.5°;前級迎角則先增大后減小,迎角最大值僅為2.5°左右(圖9(b))。分離過程中,后級CA整體呈增大趨勢,而前級CA則保持不變(圖9(c))。此外,后級分離后,CN和Cm迅速增大;與之相比,前級分離后,CN與迎角的變化規律基本一致,Cm則逐漸減小(圖9(d)和(e))。分離后0.19 s,兩級之間的距離達到設定的安全閾值,試驗結束。

圖9 軌跡捕獲試驗結果Fig.9 Trajectory capture test results
4 結論
本文基于FL-23 風洞試驗段已有條件建立了高速風洞級間分離軌跡模擬試驗系統:
1)系統具有兩套獨立驅動、協同運動的機構,可以實現兩臺天平同時測量前、后級模型氣動力。
2)系統具備鉛垂面內級間分離軌跡捕獲試驗能力,可實現前級迎角、后級迎角、x向相對運動和y向相對運動的4 個自由度協同模擬。
3)系統具備大空間網格測力試驗能力,后級相對前級的運動范圍能夠滿足絕大多數飛行器從分離開始至達到安全分離距離的試驗模擬需求。
4)在軌跡捕獲試驗中,試驗系統能夠協同模擬前、后級的姿態角和相對位置,得到氣動干擾影響下兩級飛行器的分離軌跡。
5)系統具有較大的結構剛度和強度,能夠有效抗擊超聲速風洞啟動關車中的沖擊載荷,使FL-23 風洞具備了開展馬赫數 0.4~4.5 大速域范圍級間分離軌跡捕獲試驗的能力。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
