基于相位變換聲鑷的單個微粒平面移動操控*
2021-11-19 05:15:48朱紀霖高東寶曾新吾
物理學報 2021年21期
朱紀霖 高東寶 曾新吾
(國防科技大學氣象海洋學院,長沙 410073)
聲鑷一般是指利用聲輻射力原理對微小粒子進行懸浮和移動的一種技術.粒子的水平移動是聲鑷操控粒子的常見方式之一.本文理論推導了聲輻射力與聲壓之間的直接關系,結果表明聲壓極大值點(聚焦點)與聲輻射力勢能的極小值點之間具有對應關系,并根據聲陣列相位合成原理建立了聲鑷聲場聚焦模型.文章基于數值仿真方法,以雙側16 陣元聲鑷裝置為例,分析了粒子水平移動的控制方法和穩定性.由于受到重力影響,粒子水平移動過程中必須考慮豎直方向的平衡問題.聲場中,不同位置的粒子向各方向水平移動的穩定性是不同的.越靠近陣列中心,粒子移動的穩定性越高.粒子移動步長(精度)對移動穩定性也有重要影響.一般來說,步長越短穩定性越高.本模型中,移動步長減小1/2,穩定性提了高近40%.研究結果對于設計聲鑷粒子移動控制方法,規劃粒子移動路徑,推動聲鑷技術應用等具有理論意義.
1 引言
聲鑷技術屬于無接觸式操控技術的一種,是近年來聲學領域的熱點研究方向之一.從原理上來說,聲鑷技術主要是利用聲輻射力效應使微小顆粒被束縛在勢能極小值的位置處,進而通過調控該匯聚點的位置實現對微粒的操控.相比其他類型的無接觸式操控方法,聲鑷技術具有獨特的優勢.不同于磁懸浮和光鑷等技術,聲鑷技術不需要懸浮微粒具有鐵磁性[1]或透光性[2]等特殊性質.在聲鑷設計過程中僅需考慮微粒的密度和體積等基本參數即可.聲鑷技術很少產熱,對微粒本身基本沒有有害的影響[3].除此之外,聲鑷裝置的安全性較高,成本也較低,同等能量輸入的條件下,聲鑷裝置產出的能量要遠遠高于光鑷裝置.聲鑷裝置懸浮的最大微粒直徑可以達到厘米量級[4],而光鑷操控的最大微粒直徑僅在微米量級[5].這些獨有優勢是聲鑷在近年來成為熱點研究的原因.
聲鑷技術起源于聲懸浮技術,是聲輻射力原理的應用方向之一[6].1990 年,Wu[7]基于單超聲換能器裝置首次實現了青蛙卵的懸浮與移動,由此提出了聲鑷的概念.因此從技術組成來講,聲鑷技術可以分為懸浮和移動兩個部分.一般來說,聲鑷裝置首先將微粒進行懸浮,而后通過移動技術可以將微粒搬運到目標位置.聲懸浮技術主要包括駐波場[8]、行波場[9]和聲流[10]等基本機理.通過增加聲透鏡裝置,還可形成渦旋聲場和瓶聲場等多種特殊的聲懸浮聲場形式[11].微粒移動技術是聲鑷裝置的關鍵技術之一,也是其有別于聲懸浮裝置的關鍵點.大體上來說,可包括裝置移動技術和參數調節技術兩種.所謂裝置移動技術,是通過將聲懸浮裝置與步進電機相結合,通過控制步進電機實現聲懸浮裝置的整體移動,進而實現懸浮微粒的移動.參數調節技術主要是通過調節換能器的幅值和相位等基本參數,實現微粒在聲鑷裝置內部的位置移動.
以駐波場聲鑷為例,該裝置通常由一對上下正對放置的平面陣列組成.此時,可以改變其中某些陣元輸出信號的幅值[12],也可以改變其中某些陣元輸出信號的相位[13],或者同時改變幅值與相位分布[14,15,16]均可以實現微粒水平或豎直移動的目的.在幅值調節技術中,通過調節相鄰兩個換能器之間的聲信號幅值差改變勢能極小值點的位置,從而實現微粒的移動.但此時微粒僅能沿著相鄰換能器的中心點連線移動,而不能沿著其他方向移動,限制了聲鑷裝置微粒操控的有效范圍.相位調控技術具有精度高、有效范圍廣等優勢,也是目前多種聲鑷裝置采用的技術途徑.但是目前關于相位調節方法的適用范圍和有效精度等問題的研究還非常有限.本文基于相位合成原理和聲輻射力理論建立了換能器陣列相位控制模型,分析了重力對微粒平衡位置的影響.基于有限元方法模擬了換能器陣列相位調控方法,分析了相位調控精度對微粒移動方向和有效操控范圍的影響.本文研究結果對微粒移動路徑規劃以及設計高精度聲鑷裝置等具有理論意義.
2 理論分析
由于微粒總是在勢能最小的位置處達到平衡狀態,所以,勢能最小值(極小值)點處可供微粒懸浮,移動該點又可以使微粒跟隨移動,達到操控的目的.基于此,構建與移動勢能最小值(極小值)點就成了變相位聲鑷發揮作用的關鍵步驟.
根據Gor’Kov[17]的聲輻射力勢能理論,微粒受到的聲輻射力可以表達為
其中,F為微粒受到的聲輻射力,U為聲輻射力勢能,R為微粒半徑,ρ0為介質密度,c0為室溫下的聲速,prms和vrms分別為均方根聲壓和均方根質點振速.在Gor’Kov[17]提出的理論中,聲輻射力勢能是聲壓和質點振速的多值函數,如果能夠將聲輻射力勢能變成聲壓或者質點振速的單值函數則會使聲輻射力勢能變得直觀易處理.在傳播過程中,小振幅聲波的波形畸變會累積產生非線性效應,如果傳播的距離不是很遠(定義馬赫數Ma為質點速度和聲速之比,當Ma ?1 時,非線性效應可以忽略),仍然可以用線性聲場[18,19].這里將質點振速用局部聲壓來表示.線性聲學中有

將換能器視為活塞聲源,假設活塞以速度u=uaejωt振動,其向半空間輻射的聲壓場可以表示為[20]

其中 j 為虛數單位,ω為角頻率,k為 波數,ρ0為媒質密度,ua為換能器表面振速幅值,a為換能器表面半徑,r為換能器表面中心到目標點的距離,θ為矢徑r與換能器表面法向矢量的夾角,t是時間,J1(·)是一階貝塞爾函數.這里省略聲壓的虛部.將(4)式代入(3)式得

將(5)式代入(2)式:


圖1 換能器與焦點之間的幾何關系.坐標原點位于下方陣列的中心處,x 軸和y 軸分別平行于方形陣列的兩個邊.這里將換能器與聚焦點之間的距離視為換能器表面中心與聚焦點之間的距離,z 軸垂直指向上方陣列.圖中,某換能器中心到聚焦點在該陣元平面上的投影點之間的距離為 d,上下陣列平面之間的距離為H,換能器與聚焦點間的距離為 r,d與 r之間所夾銳角記為ξFig.1.Geometric relationship between the transducer and the focal point.Origin of the coordinate is located at the center of the lower array,and the x-axis and y-axis are parallel to the two sides of the square array.Here,the distance between the transducer and the focus point is regarded as the distance between the center of the transducer surface and the focusing point,and the z-axis points vertically to the upper array.In the figure,the distance between the center of a certain transducer and the projection point of the focal point on the array plane is d,the distance between the upper and lower array planes is H,and the distance between the transducer and the focal point is r .The acute angle in between dand ris recorded as ξ .
由于聲壓中含有時空周期變化的指數項,所以可以運用相位調制的方法,使聲壓聚焦于目標點.假設上下兩個陣列相距H,聚焦點到上方陣列的距離為H1,到下方陣列的距離為H2,坐標原點位于下方陣列的中心處,x軸和y軸分別平行于方形陣列的兩個邊,z軸垂直指向上方陣列.聚焦點位于兩個平面陣列中間的任意一個位置 (x0,y0,H2) 處.將聚焦點到任意1 個陣元的距離r視為聚焦點到該換能器表面中心點的距離,聚焦點到平面上的投影與換能器表面中心之間的距離為d,d與r之間所夾銳角記為ξ.將問題一般化,上下平面總共有2N個陣元,對應的r值和ξ值也有2N個.下表面的某個陣元表面中心點的坐標為 (x1,y1),那么其到聚焦點的投影點的距離為

該陣元所對應的變量:
每個換能器在聚焦點處的聲壓貢獻量為

為了使同一點處的聲壓達到最大,在換能器的激勵信號上引入遲滯相角φn.此時聚焦點處的聲壓強度為

記ηn=φn-krn,f(η)=ejη為周期函數,一個完整的周期內f的最大值為1.不妨認為此時η為0,An >0,所以pt此時取得最大值,遲滯相角φn=krn,這樣就可以實現聲壓在目標點處的聚焦.目標點處形成的聲壓極大值同時也是聲輻射力勢能的極小值,微粒在僅受聲輻射力作用的情況下將被束縛于目標點.聚焦點的移動,實質上就是聲壓在不同點處實現聚焦.不同的點到達各換能器距離不一,而距離又決定了相角的大小,所以引入的遲滯相角也不一致.這樣當聚焦點的位置在兩點之間變換時,根據不同的點改變各換能器發射信號的相角即可.
平面移動是聲鑷的典型操作之一,本文主要討論粒子在平面上移動的情況.微粒從某一位置移動至下一個位置的過程中系統發生的變化包括:極小勢能點的移動和微粒的受力移動.該過程如圖2(a)—(c)所示.當形成聲壓聚焦點時,微粒被束縛于該聚焦點處,即勢能極小值點處.通過改變各換能器發射信號的相角,從而在平面內改變聚焦點的位置,即實現了勢能極小值點的移動.由于聚焦點的移動,微粒暫時地移動到力的匯聚區的邊緣,在不脫離力的匯聚區范圍的情況下,微粒受到1 個指向勢能極小值點的力的作用,在沒有水平方向外力干擾的情況下,微粒最終會運動至聚焦點處.
以圖2(d)和圖2(e)中描述的過程來說明具體的移動方法.當實現如圖2(d)所示聚焦時,換能器相位分布情況為:φ紅=kr紅=13.593 rad,φ黃=kr黃=17.092 rad,φ綠=kr綠=19.988 rad;當聚焦點需要變換至圖2(e)所示位置時,換能器相位相應地變化為:φ紅=kr紅=13.593 rad,φ黃=kr黃=17.092 rad,φ綠=kr綠=19.988rad,φ藍=kr藍=22.514 rad,φ橙=kr橙=24.785 rad.
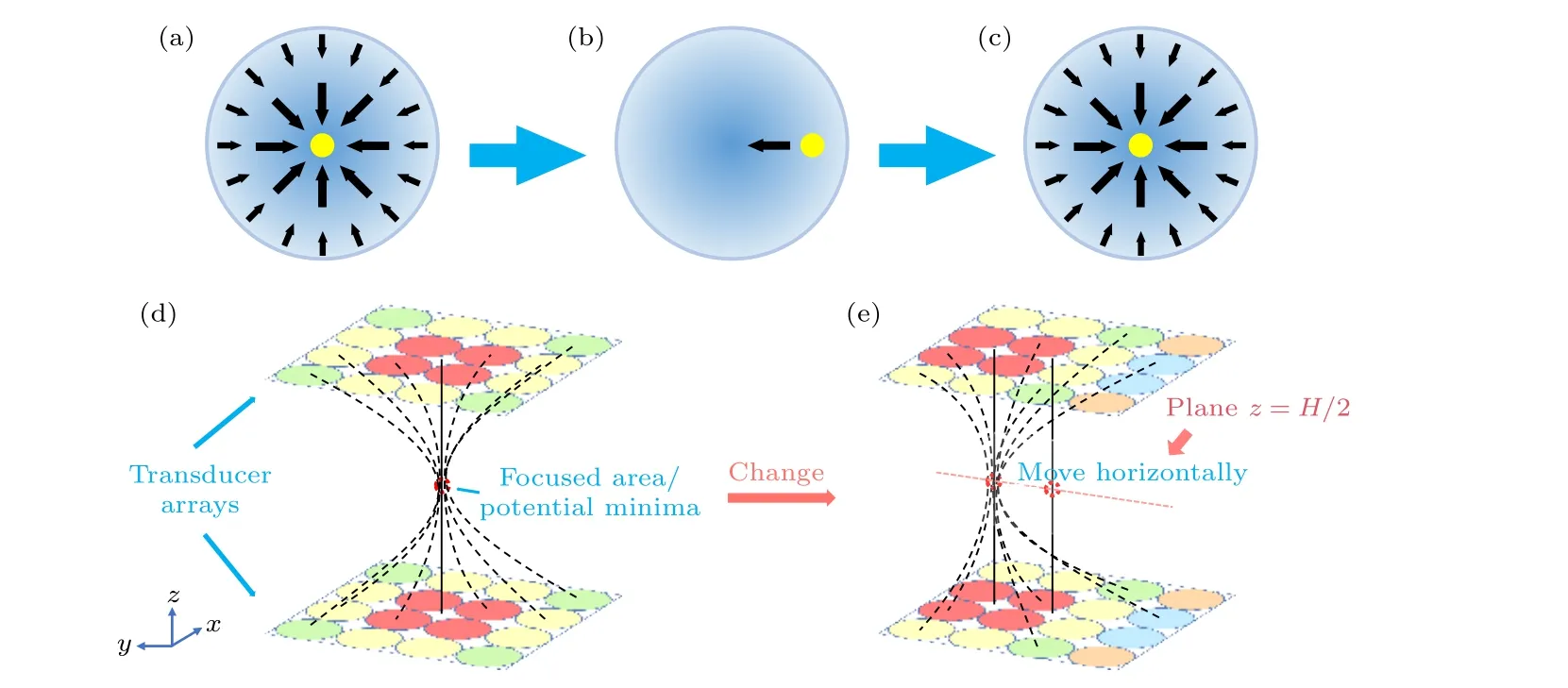
圖2(a)-(c) 微粒在平面內移動過程的俯視示意圖,其中(a)微粒被束縛在聚焦點處,黑色箭頭代表力的分布;(b)聚焦點移動后微粒與力的匯聚區相對位置示意圖,黑色箭頭代表微粒所受力的方向;(c)微粒回到聚焦點;(d),(e)力的匯聚區移動的示意圖.上下兩塊正對的正方形區域為換能器陣列所在平面,上嵌的圓圈代表換能器,不同顏色代表不同的相位.力的匯聚區以紅色虛線圓圈表示,黑色虛線簇代表聲線,黑色實線為輔助線,用以標明力的匯聚區位置,粉色虛線為力的匯聚區移動軌跡所在直線Fig.2.(a)-(c) Schematic top views of the movement of particles in a plane:(a) Particles are bounded at the focus point,and the black arrow represents the distribution of acoustic radiation force (ARF);(b) schematic diagram of the relative position of the particle and the convergent area of the force after the focus point moves,with a black arrow representing the direction of the force acting on the particle;(c) particle returning to the focus point.(d),(e) Schematic diagrams of the movement of the force convergence area.The upper and lower two square areas facing each other are the planes where the transducers are located.The circles embedded on the planes represent the transducers,and different colors represent different phases.The force convergence area is represented by a red dashed circle.The black clusters of dashed lines represent acoustic rays.The black solid line is an auxiliary line to indicate the location of the force convergence area,and the pink dashed line is the straight line where the trajectory lies.
將操控面選定為平面z=H/2,如圖2(e)所示.駐波場中聲輻射力沿軸向的分布如圖3 所示,聲輻射力和聲壓一樣沿著圖中的z軸周期變化,正負代表其方向,最大值介于兩個最小值之間.不考慮重力的影響時,粒子懸浮于聲輻射力為0 的匯聚點處.但由于微粒自身重力不可忽略,對于懸浮會產生一定的影響.若能夠懸浮,粒子位置將在力的匯聚零點之下,相鄰的力的最大值之上[21],即圖3中紅色虛線之間的區域.當聲壓為一簡諧波時,聲輻射力的波長為聲壓波長的一半,所以聲輻射力極值和相鄰的聲輻射力零值相距λ/8[22],這里λ指聲壓的波長.本文中微粒穩定懸浮的高度位于H/2-λ/8和H/2 之間.除了垂直正對的換能器之間會產生駐波外,其余換能器之間也會產生駐波點,那么聲輻射力的最大值和最小值可能不在理論位置.因此,微粒的移動并不能穩定在某一個確定的高度,而是在z=H/2 附近.在第3 節中會詳細討論該問題.
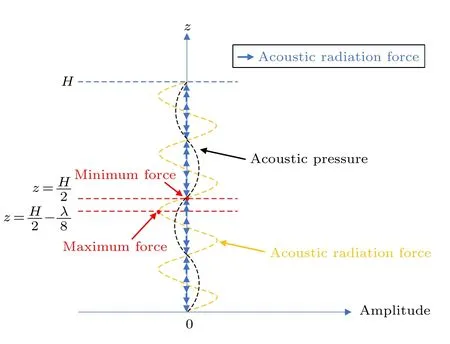
圖3 某對換能器在垂直方向產生的駐波聲場中的相關元素示意圖.黑色虛線為聲壓的垂向分布,黃色虛線為聲輻射力的垂向分布,藍色箭頭的長短和方向代表聲輻射力的大小和方向.z 軸上的H/2 高度處應為力的匯聚點,其下方1/8 個波長處應為相鄰的1 個力的極大值對應的高度Fig.3.Schematic diagram of the relevant elements in the standing wave acoustic field generated by a pair of transducers in the vertical direction.The black dashed line is the vertical distribution of acoustic pressure,the yellow dashed line is the vertical distribution of the ARF.The length and direction of the blue arrow represent the magnitude and direction of the ARF.The height of H/2 on the z axis should be the convergence point of the force,and the oneeighth of the wavelength below it should be the height corresponding to the adjacent maximum force.
3 數值模擬及移動穩定性
結合具體例子給出計算和分析的過程,模型結構簡圖見圖1.上下兩個陣列平面各由16 (4 × 4)個換能器組成,正對放置,陣元之間緊密排列.每個換能器直徑為1 cm,發射的聲波頻率為40 kHz,在室溫(25 ℃)下波長λ為8.575 mm.上下兩個陣列平面相距4 個波長.陣元的仿真以實驗室現有的換能器為例,測得其正常工作時距離表面1.2 cm處的聲壓約為141 Pa.此時,Ma=0.004?1,可以使用線性聲學的理論.利用Gor’Kov 的理論((1)式和(2)式),在有限元仿真軟件(COMSOL Multiphysics)中可以計算出域上的勢能分布.三維模型參數如圖1 所示,研究類型選取為“壓力聲學-頻域”.換能器區域設為平面波輻射邊界,上下正對的兩換能器相位一致,所有換能器的幅值相同.網格剖分設為自由四面體網格,最大單元邊長為1.4 mm,符合聲學有限元計算條件.Gor’Kov的理論應用的前提條件是a ?λ,即微粒的半徑遠小于入射波波長.這個條件引入的目的是確保微粒內部的聲共振模式難以被激發,將微粒視為剛性的而忽略壓縮性[18].計算時選取的懸浮對象是半徑為1 mm 的粒子.由聚焦而形成的勢能低值區(圖4(c)和圖4(d)中的亮斑)有許多指代方法,如聲壓聚焦區、力的匯聚區、勢能低值區等,在后面的內容中統一稱為力的匯聚區.
由于微粒的移動和力的匯聚區移動相關,匯聚區的移動特性將關系到微粒移動的穩定性.對于平面內點到點的移動,不失一般性地將其視為在二維網格點上的移動.為了簡單起見,選擇正交格點.格點間距的選擇和聲輻射力的分布密切相關.在操控面上,從過聚焦點的一條截線上看聲輻射力分布,聲輻射力圍繞焦點形成1 個圓形匯聚區,從中心向外側先增大后減小至0,零值的位置即為該匯聚區域的邊界.圖4(b)中的兩點數據顯示此時平面上的聲輻射力的匯聚區半徑約為0.89λ(0.76 cm).在正交格點中,格對角線總是長于格邊,那么格對角線的距離最多為0.89λ.在這種情況下,格點間距為0.63λ(0.54 cm).考慮適當縮小對角線距離,使得在聚焦點沿格對角線移動時微粒依然位于匯聚區內,所以將格點間距選為0.58λ(0.5 cm),如圖5(a)中的橙色格線所示.
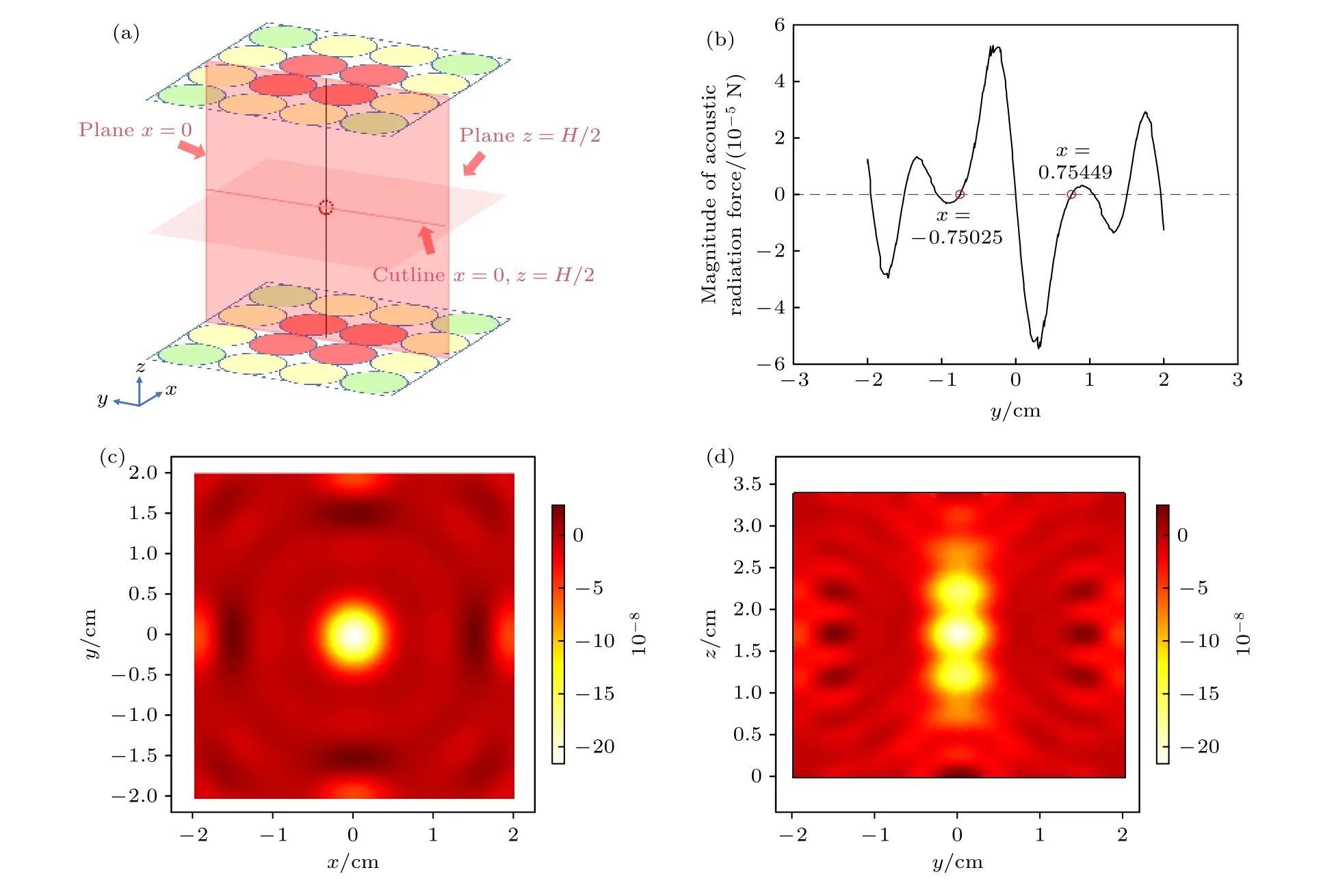
圖4 聚焦點在中心時聲輻射力勢能的分布 (a)聚焦點在中心時的相位分布示意以及截面z=H/2、截面x=0、截線x=0、截線z=H/2 所在位置;(b)截線x=0,z=H/2 上聲輻射力在y 方向的分量;(c)平面z=H/2 上的聲輻射力勢能的分布;(d)平面x=0 上的聲輻射力勢能分布Fig.4.Distribution of ARF potential energy when the focal point is at the center:(a) Phase distribution diagram when the focal point is at the center and the position of section z=H/2,section x=0 and section line x=0,z=H/2;(b) component of the ARF in the y direction on the section line x=0,z=H/2;(c) distribution of ARF potential energy on the plane z=H/2;(d) distribution of ARF potential energy on the plane x=0.
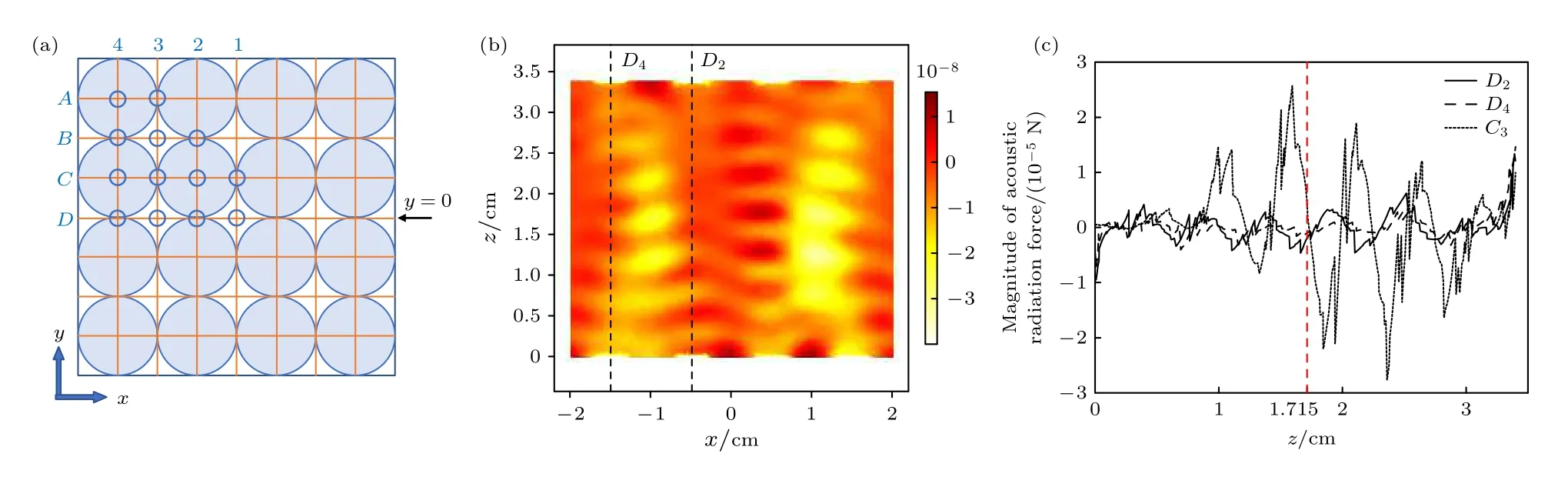
圖5(a) 格點化操控表面以及部分聚焦位置.根據對稱性將所有點歸類為圖中的10 個實線藍圈所標出的點,3 個虛線藍圈標出的點為補充遺漏路徑需要繪制的點.經線從中心向外圍以遞增數字1-4 標注,緯線自上而下以A,B,C,D 標注.這樣任意一點可以以字母與數字的組合命名,字母在前數字在后,如中心處的點為D1 點.(b)聚焦點在C3 處時,y=0 截面上聲輻射力勢能的分布.橫坐標為x 軸刻度,縱坐標為z 軸刻度.圖中標注出了D2 和D4 處的垂直截線.當聚焦點位于C3 時,取D2,D4,C3 這3 個位置處的3 條垂直截線,繪制了沿其分布的垂向聲輻射力于(c)圖中,正負代表方向,紅色虛線標注出高度z=1.715 cmFig.5.(a) Grid on the manipulation plane and part of the focus position.According to symmetry,all points are represented as the points marked by the 10 solid blue circles in the figure,and the points marked by the 3 dashed blue circles are the points that need to be drawn to supplement the missing path.Longitude lines are marked with increasing numbers 1-4 from the center to the periphery,and latitude lines are marked with A,B,C,and D from top to bottom.In this way,any point can be named with a combination of letters and numbers,with letters in the front and numbers in the back,for example,the point at the center is the D1 point.(b) Distribution of the ARF potential energy on the y=0 section when the focal point is at C3.The coordinates of x axis and z axis are recorded on abscissa and ordinate respectively.The positions of D2 and D4 are marked in the figure.The distribution of vertical ARF along three vertical cutlines D2,D4,C3 are depicted in panel (c) when focusing point is located at C3.The signs of ARF represent their directions.Red dashed line marks the latitude of z=1.715 cm.
此時,格點化后的陣列表面共有49 個點.考慮到在邊界處聲壓難以聚焦,或者聚焦效率極低,且微粒一旦移出邊界便不可控,所以邊界處并未劃分格點.為了便于指代,緯線自上而下以字母標注,經線從右至左以數字標注,指代時字母在前數字在后,比如陣列中心處的點稱為D1點.根據對稱性,將這些點歸類為10 個點,相鄰點之間的轉移路徑,加上B4到B3,C3到B2以及D2到C1之間的3 條特殊路徑即可以囊括平面格點上所有的移動情形.
當力的匯聚區移動,微粒能夠跟隨移動需要滿足兩個條件.首先,要將微粒穩定在操控平面附近;其次,微粒要位于匯聚區內.對于第1 點,聚焦點移動后,原位置處力的極小值點上下移動范圍不能過大,且原位置處減弱后的極大垂向聲輻射力必須依然大于重力,這樣保證操控基本上位于水平面內.對于第2 點,只有當原位置在焦點移動后依然位于匯聚區內,微粒在平面內才可獲得向中心移動的作用力,否則該移動路徑不穩定.
聚焦點可能位于10 個點的任意一處,而聚焦點所在的每一個位置都可以視為從該點周圍的某一點移動而來.遍歷聚焦點的所有可能位置,選取各位置處H/2 高度附近的力的極小值點處所對應的平面和其下方相鄰的一個力的極大值點處所對應的平面,通過這些平面上水平力的分布情況判斷周圍的點是否包含在匯聚區內,從而判斷移動是否滿足第2 個條件.按理想情況來看,即勢能場不發生變形,極大值點和極小值點的位置都會相對固定,分別位于H/2和H/2-λ/8 高度附近.但在聚焦點靠近邊界的過程中,不僅力的匯聚區的形狀會發生變化,力的匯聚區的位置也會發生橫向與縱向的偏移,從而導致當聚焦點在某些位置時其周圍點上力的分布發生巨大的變化,使得移動變得極不穩定.理論上來講,當聚焦點位于操控平面上的某一格點處時,該點和周圍點上的垂向聲輻射力應均為極小力,即H/2=1.715 cm 應為力的極小值所在高度.但是當邊緣附近聲場形態發生改變時,力的極小值所在高度定會發生改變.規定當聚焦點和周圍點力的極小值位于高度H/2-λ/8=1.608 cm 之上且高度H/2+λ/8=1.822 cm 之下時,視操控為穩定操控,超出該范圍即為不穩定操控.
以C3點為例,圖5(b)給出了當聚焦點在C3位置處時y=0 截面上聲輻射力勢能的分布.可以看出,相比于在聚焦中心C3處的聲輻射力分布,D2和D4處聲輻射力的分布發生了明顯的改變,D2和D4處力的相位發生明顯偏移,D4處周期性明顯減弱,見圖5(c)中3 條曲線的對比.這樣,微粒移動就變得非常不穩定.這樣的變形現象在遠離中心的邊界處尤為明顯和普遍.考慮到力的匯聚區會發生扭曲變形,但在其中心點附近一定范圍內變形程度尚可接受,于是考慮通過細化格點的方法縮短每一步的移動距離,使得每一次聚焦點位置改變后微粒都盡量靠近聚焦中心,降低勢能場變形帶來的影響,增強移動的穩定性.
將格點細化一倍,格點間距從0.58λ縮小至0.29λ,如圖6(a)所示.依照對稱性,聚焦點在圖中36 個位置上的移動可包含所有的情況.在這種情況下,雖然聚焦點在部分位置處周圍格點上聲輻射力的垂向分布依然出現明顯的相位差甚至反相,或者無明顯周期的波動,但是和粗格點相比,穩定性已有了明顯的改善.圖6(b)選取了當聚焦點位于F5(粗格點中的C3位置)時點F5、點G4和點H3(粗格點中的D2位置) 3 處沿垂向截線的聲輻射力分布曲線作為對比.F5處的聲輻射力的分布最接近理論分析的情況,在這樣的垂向聲輻射力分布下,微粒可以被懸浮于操控平面附近.聚焦點在細網格中從G4向F5的移動類比于聚焦點在粗網格中從D2(H3)向C3(F5)的移動.G4處的聲輻射力分布的空間相位并未發生過大改變,基本和聚焦點處的力的相位保持一致.然而粗網格中的D2點處垂向聲輻射力的空間相位變化太大,微粒在此情況下必不能穩定于操控平面附近,可能向下掉落.這樣的對比在其他的位置處很常見.按照對于不穩定路徑的定義,以穩定移動的路徑占統計總路徑的百分比為該格點穩定性的評價標準.定義穩定的路徑占總路徑的百分比為穩定性大小,經統計,粗格點的穩定性僅為46.67%,細格點的穩定性較粗格點提升巨大,達到了85.25%.因而細化的格點提升了移動的穩定性,大大提高了第1 個條件的滿足程度.
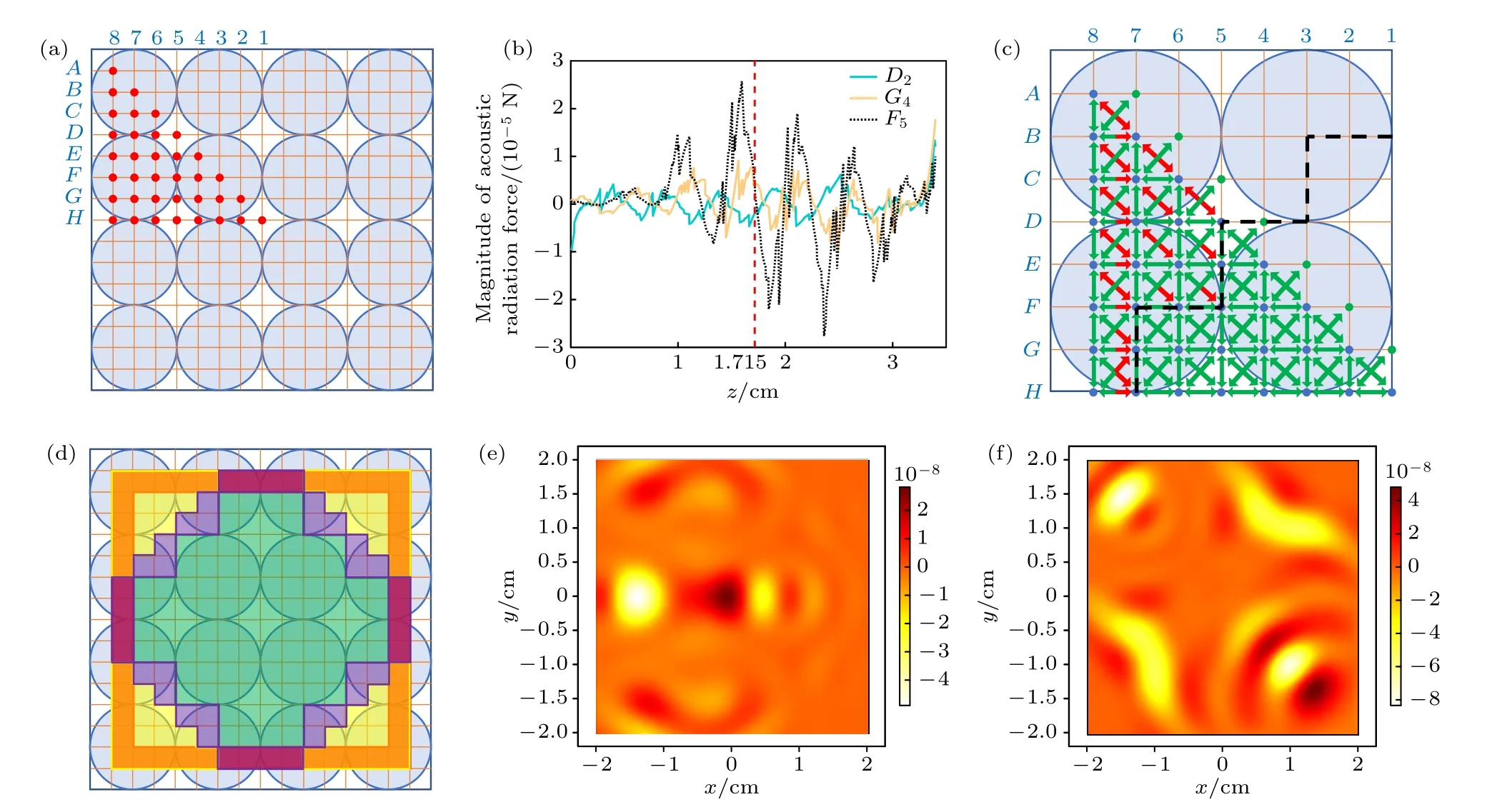
圖6(a) 細化后的格點平面圖,圖中的紅點區域為囊括所有移動情形的最小研究區域,格點的命名法則與之前的粗格點相同.(b)聚焦點位于細格點平面F5 處(粗格點平面C3 處)時,格點F5 (C3),G4 以及粗格點平面中D2 處垂直截線上垂向聲輻射力隨高度的分布情況.紅色虛線標出1.715 cm 高度.(c)紅色箭頭代表不穩定移動的路徑,綠色箭頭代表穩定移動的路徑.黑色虛線右下方為穩定移動的區域,左上方為不穩定移動的區域.(d)綠色區域為可穩定操控微粒的區域;紫色區域內跨對角線向中心移動是不穩定的;黃色區域內斜跨對角線向中心和向外移動是不穩定的;紅色區域內沿網格線向中心移動不穩定;橙色區域為紅、黃交疊區域,深紫色區域為紅、黃、紫交疊區域.(e),(f)聚焦點分別位于H7 和B7 處時,操控平面上聲輻射力勢能的分布Fig.6.(a) Refined grid plane.The red dot area in the figure is the smallest research area that includes all moving situations.The nomenclature of the points is the same as the previous coarse grid points.(b) Distribution of vertical ARF along 3 vertical cutlines located at F5 (C3 in the coarse grid),G4 and D2 (the coarse grid) respectively.Red dashed line marks the height of 1.715 cm.The red arrows in panel (c) represent the path of unstable movement,and the green arrows represent the path of stable movement.Below the black dotted line is the stable moving area,and the rest part is the unstable moving area.The green area in panel (d) is the area where the particles can be stably manipulated.The purple,yellow and red area are areas where movement along diagonal of grids towards the center,movement along diagonal of grids towards and away from the center,movement along grid line towards the center are ubstable;orange area is the superposition of red area and yellow area,dark purple area is the superposition of red,yellow and purple area.(e),(f) Distribution of ARF potential energy on manipulation plane when the focus points are located at H7 and B7.
對于穩定的點,選取中間高度 1.715 cm 和力的極大值的平均高度 1.565 cm 這兩個具有代表性的高度來檢驗是否滿足第2 個條件.通過逐點繪制兩個高度上的力場,發現所有滿足第1 個條件的點在對應的高度上均可獲得向心力,滿足第2 個條件,所以這些穩定移動的路徑理論上均可以實現.
將穩定與不穩定的路徑繪制在圖6(c)中,可以明顯地看出,不穩定的路徑集中于虛線左上部分,虛線右下部分均可以實現定向移動.不穩定的路徑最多的是跨格點對角線的路徑,從中心向外輻射的或者從外向內匯聚的都有.沿著格線的移動路徑也有一部分屬于不穩定的范疇,它們基本是從最外圍一層格線向內層移動的路徑.在聚焦點從中心H1向頂點A8移動的過程中,力的匯聚區在到達D5點之后開始明顯變形,由圓形逐漸變為橢圓形,短軸沿著H1—A8方向(圖6(f)).在這樣的形變下,沿對角的路徑往往是不穩定的.而在聚焦點從經線1 到經線8 的垂直移動的過程中,力的匯聚區在到達H7點之后開始發生明顯變形,從圓形變成“包子形”(圖6(e)),“包子”向中心一側凸起,所以微粒從最外層經線向內層經線的移動總是不穩定的.這樣來看,不穩定的移動路徑大多發生在邊界處.
根據對稱性,從圖6(c)延伸可得到整個操控平面上的路徑穩定性情況.圖6(d)對路徑進行了分類.其中綠色覆蓋的區域為完全穩定的路徑,其余部分為不穩定的移動路徑.外圍有一圈紅色所覆蓋的區域,代表粒子沿格線從外側向內側移動的路徑是不穩定的;紫色覆蓋區域表示沿對角線向中心移動的路徑缺乏穩定性;黃色所覆蓋的區域代表沿對角線向中心匯聚和向外發散的路徑均缺乏穩定性;交疊區域同時包含兩種類型的不穩定路徑.有交疊的區域集中于最外一層的網格上,代表了在這個區域內有多種不穩定路徑的存在.這種現象的產生在路徑規劃中涉及到綠色區域之外的區域時應注意回避這些路徑.
4 總結
本文首先建立了聲壓與聲輻射力勢能之間的直接關系,在理論上證明了變相位聲鑷實現的可行性.其次指出了變相位聲鑷的本質就是通過相位調制實現聲壓聚焦點的移動,同時考慮了移動過程中重力的影響,指出平面移動只是限制在一定范圍內的移動.以平面陣列聲鑷為例,分析了不同移動路徑下的粒子穩定性問題.在聲鑷聲場的不同位置,粒子向各方向移動穩定性是不同的.一般來說,斜向移動和邊界處的粒子移動穩定性差,需要在實際路徑規劃過程中予以注意.可以通過減小移動步長,提高移動穩定性.在本文算例中,步長減小1/2,穩定性提高近40%.
除了格點間距過大和靠近邊緣處力的匯聚區發生形變會導致移動不穩定外,平面陣列的規模也會對移動穩定性造成一定的影響.加大陣列的規模,使行和列都有所增加,可以使邊緣離中心更遠,從而擴大穩定移動區域的范圍.本文的工作對于變相位型聲鑷的研究與設計具有一定的參考意義.