基于分段高斯偽譜法的組合動(dòng)力飛行器火箭掛飛軌跡規(guī)劃
2021-11-19 12:19:44曲文慧張晗祺吳了泥尤延鋮董一巍
航天控制 2021年4期
曲文慧 張晗祺 吳了泥 尤延鋮 董一巍
廈門大學(xué) 航空航天學(xué)院,廈門 361102
0 引言
寬速域水平起降飛行器是未來航空航天領(lǐng)域的發(fā)展方向,其設(shè)計(jì)制造是目前研究的熱點(diǎn)問題。由于寬速域飛行器的速度需要從0至高馬赫數(shù),跨度很大,其使用的動(dòng)力系統(tǒng)就對(duì)飛行器的性能有著至關(guān)重要的影響。通過目前的研究,渦輪基組合循環(huán)(Turbine-based Combined Cycle, TBCC)發(fā)動(dòng)機(jī)是實(shí)現(xiàn)寬速域飛行的關(guān)鍵技術(shù)之一。
在組合動(dòng)力發(fā)動(dòng)機(jī)的研制過程中,需要進(jìn)行高空飛行試驗(yàn),驗(yàn)證其穩(wěn)定和控制特性,獲得地面試驗(yàn)無法獲得的流動(dòng)和氣動(dòng)數(shù)據(jù)。但是受當(dāng)前技術(shù)水平限制,無法使用渦噴發(fā)動(dòng)機(jī)使中小型試驗(yàn)飛行器直接從速度0加速至超音速。因此本文采用助推火箭將飛行器帶至所需馬赫數(shù)再進(jìn)行分離的技術(shù)路線,不僅可以解決目前技術(shù)水平限制的問題,還可以通過這種方法使得飛行器達(dá)到所需的高度和速度,對(duì)飛行器進(jìn)行高空高速試驗(yàn),具有研究意義和工程應(yīng)用價(jià)值。
采用可回收式助推火箭帶飛后分離的方法涉及到兩套系統(tǒng)的一體化軌跡優(yōu)化問題。其中較為重要的是分離點(diǎn)的選取,若分離點(diǎn)高度選取過低,則飛行器氣動(dòng)阻力較大,同時(shí),垂直發(fā)射的助推火箭在分離點(diǎn)仍有較大軌跡角,飛行器無法通過自身的機(jī)動(dòng)快速拉平實(shí)現(xiàn)平飛,不利于試驗(yàn)段的加速。若選取的分離點(diǎn)過高,雖然氣動(dòng)阻力會(huì)減小,但是會(huì)造成渦噴發(fā)動(dòng)機(jī)吸入氣流不夠,導(dǎo)致推力不足,甚至熄火等問題。同時(shí)該助推火箭和飛行器雙系統(tǒng)的軌跡優(yōu)化問題還受到飛行器結(jié)構(gòu)、引射火箭與發(fā)動(dòng)機(jī)性能等多約束條件的限制。因此,研究一種適應(yīng)多種約束條件,適應(yīng)助推火箭和飛行器雙系統(tǒng)的軌跡優(yōu)化方法,具有十分重要的意義。
軌跡優(yōu)化問題是一個(gè)非線性的、受到各種約束的最優(yōu)控制問題。求解最優(yōu)控制問題目前大致分為間接法和直接法兩大類[1]。其中間接法是將最優(yōu)控制問題轉(zhuǎn)換為Hamilton邊值問題,該方法求解復(fù)雜的非線性問題非常困難。而直接法是通過離散化方法將連續(xù)系統(tǒng)的最優(yōu)控制問題轉(zhuǎn)化為非線性規(guī)劃問題,再通過數(shù)值方法求解[2]。直接法中通過離散控制變量和狀態(tài)變量的偽譜方法,由于在計(jì)算效率上的優(yōu)勢(shì),逐漸成為最優(yōu)控制問題求解方法的研究熱點(diǎn),同時(shí)在航空航天領(lǐng)域得到了廣泛的應(yīng)用[3-5]。目前常見的偽譜方法包括Legendre偽譜法、Radau偽譜法和Gauss偽譜法。Fahroo等[6]從近似精度、收斂速度和計(jì)算效率等方面比較了3種偽譜方法。其結(jié)果表明Gauss偽譜法在狀態(tài)變量、控制變量和協(xié)調(diào)變量的近似精度以及收斂速度等方面優(yōu)于Legendre偽譜法,且對(duì)協(xié)調(diào)變量邊界值的估計(jì)精度高于Radau偽譜法。同時(shí),Gauss偽譜法在處理含初始和終端約束的問題上具有優(yōu)勢(shì)[7],因此本文選取Gauss偽譜法求解軌跡優(yōu)化問題。
楊志紅等[8]研究了在一定高度、速度和軌跡角的初始條件下投放高超聲速飛行器,基于Gauss偽譜法以最末端軌跡角最小為性能指標(biāo)進(jìn)行的爬升端軌跡優(yōu)化;楊希祥等[9]研究了基于Gauss偽譜法的多級(jí)固體運(yùn)載火箭上升段的軌跡快速優(yōu)化,并且提出了連接點(diǎn)的概念;王文虎[10]研究了基于Gauss偽譜法和向前拉道偽譜法的亞軌道飛行器返回軌跡快速優(yōu)化,并比較了兩種偽譜法在處理復(fù)雜問題時(shí)的能力;劉超越等[11]研究了Gauss偽譜法在多階段二級(jí)助推戰(zhàn)術(shù)火箭軌跡規(guī)劃當(dāng)中的應(yīng)用。之前的研究,基本都是基于Gauss偽譜法針對(duì)單一系統(tǒng)的最優(yōu)軌跡求解,而本文采用Gauss偽譜法,對(duì)兩個(gè)不同系統(tǒng)的分離問題進(jìn)行求解,得到多條件約束下的最優(yōu)軌跡。
本文以某型助推火箭和高超聲速飛行器雙系統(tǒng)為研究對(duì)象,飛行任務(wù)分為5段:火箭助推段、火箭帶飛段、姿態(tài)調(diào)整段、試驗(yàn)段和無動(dòng)力返回段,如圖1所示。
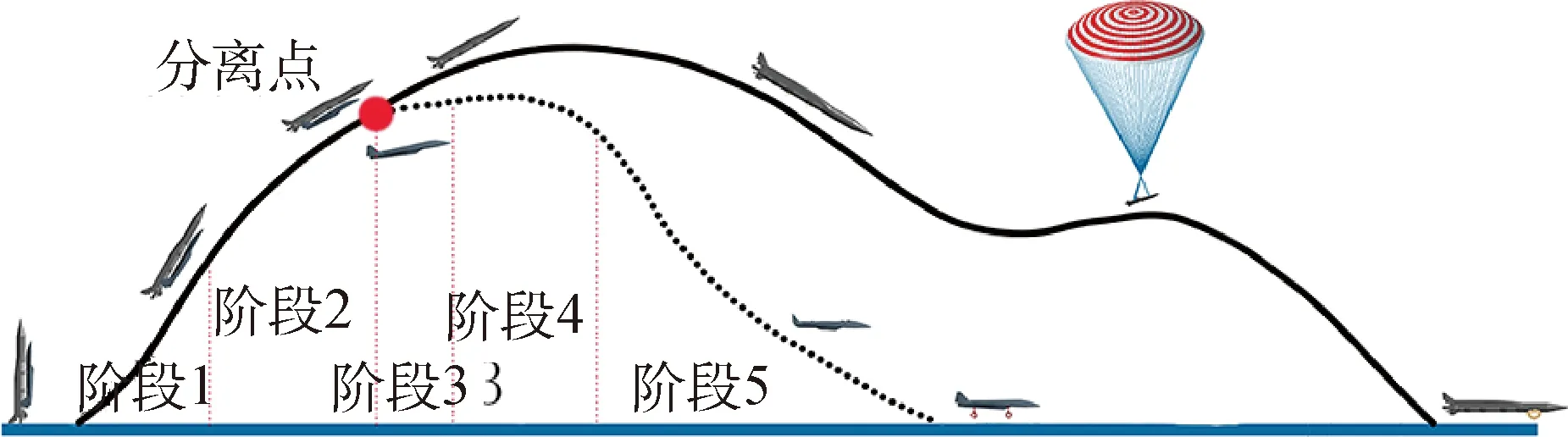
圖1 飛行任務(wù)剖面圖
每個(gè)階段的具體描述為:
階段1:火箭助推段。該階段飛行器與火箭組合,由地面垂直發(fā)射,利用火箭推力加速爬升至一定高度和馬赫數(shù)。
階段2:火箭帶飛段。該階段火箭燃料耗盡,推力消失,但飛行器仍未與火箭分離,作為組合體繼續(xù)爬高。
階段3:姿態(tài)調(diào)整段。該階段飛行器與火箭分離,飛行器在無動(dòng)力的情況下調(diào)整姿態(tài),以達(dá)到試驗(yàn)窗口要求。
階段4:試驗(yàn)段。該階段飛行器自身引射火箭工作,飛行器正加速,組合動(dòng)力發(fā)動(dòng)機(jī)點(diǎn)火,采集相關(guān)數(shù)據(jù),完成試驗(yàn)任務(wù)。
階段5:無動(dòng)力返回段。該階段飛行器無動(dòng)力返回至起飛點(diǎn)。
為簡(jiǎn)化,火箭助推段軌跡已由經(jīng)驗(yàn)設(shè)計(jì)程序攻角,形成彈道方案,本文在此基礎(chǔ)上對(duì)火箭帶飛段、姿態(tài)調(diào)整段軌跡進(jìn)行研究。
本文按照試驗(yàn)段任務(wù)目標(biāo),結(jié)合引射火箭與無人機(jī)特性設(shè)計(jì)了試驗(yàn)窗口,通過建立飛行器運(yùn)動(dòng)學(xué)模型、過程約束、邊界約束,利用分段式高斯偽譜法搭建軌跡優(yōu)化模型,將助推火箭與高超聲速飛行器分離的軌跡規(guī)劃問題轉(zhuǎn)化為以末端高度最高、速度最大、軌跡平滑為性能指標(biāo)函數(shù)的最優(yōu)控制問題。利用控制變量法研究單項(xiàng)性能指標(biāo)的權(quán)重系數(shù)對(duì)分離點(diǎn)的影響,多次對(duì)比后選取最佳權(quán)重系數(shù),得到符合任務(wù)要求的分離軌跡,為飛行器與運(yùn)載器分離軌跡規(guī)劃提供參考。
1 軌跡優(yōu)化方法
1.1 高斯偽譜法
Gauss偽譜法的實(shí)質(zhì)就是同時(shí)離散控制變量和狀態(tài)變量的直接法,也可以被稱作配點(diǎn)法或者被稱作直接配點(diǎn)非線性規(guī)劃DCNLP(Direct Collocation with Nonlinear Programming)。
Gauss偽譜法的解算步驟如下:將需要求解的最優(yōu)控制問題的控制變量和狀態(tài)變量在一系列Legendre-Gauss(LG)點(diǎn)上進(jìn)行離散;通過離散點(diǎn)為節(jié)點(diǎn)構(gòu)造的Lagrange插值對(duì)控制變量和狀態(tài)變量進(jìn)行逼近,通過全局插值多項(xiàng)式近似狀態(tài)變量的導(dǎo)數(shù),從而將系統(tǒng)從微分方程約束轉(zhuǎn)化為代數(shù)方程約束。性能指標(biāo)中的積分項(xiàng)由Gauss積分計(jì)算,終端狀態(tài)由初始狀態(tài)加上右函數(shù)在整個(gè)過程中的積分而得。最優(yōu)控制問題因此轉(zhuǎn)化為非線性規(guī)劃問題而求解[12-13]。
1)一般非線性系統(tǒng)動(dòng)力學(xué)方程
考慮一般形式的非線性系統(tǒng)動(dòng)力學(xué)方程為:

(1)
式中:狀態(tài)變量x(t)∈Rn,控制變量u(t)∈Rm,時(shí)間t∈[t0,tf]。
2)時(shí)域變換
假設(shè)最優(yōu)控制問題的時(shí)間區(qū)間為[t0,tf],而Gauss偽譜法的時(shí)間區(qū)間為[-1,1],因此對(duì)時(shí)間t進(jìn)行變換:
(2)
3)全局插值多項(xiàng)式近似狀態(tài)變量與控制變量

(3)
(4)

(5)

4)動(dòng)力學(xué)方程約束轉(zhuǎn)為代數(shù)約束
狀態(tài)變量的導(dǎo)數(shù)可以通過對(duì)式(3)求導(dǎo)而得,從而將動(dòng)力學(xué)方程約束轉(zhuǎn)化為代數(shù)約束,再代入動(dòng)力學(xué)方程可得狀態(tài)變量在配點(diǎn)處應(yīng)滿足的代數(shù)方程:
(6)
5)邊界條件及過程約束
邊界條件約束滿足:
φ(X0,t0,Xf,tf)=0
(7)
過程約束滿足:
(8)
6)性能指標(biāo)函數(shù)的近似
將最優(yōu)控制問題的性能指標(biāo)函數(shù)中的積分項(xiàng)用Gauss積分近似,得到:
J=Φ(X0,t0,Xf,tf)+
(9)
式(9)即為Gauss偽譜法中的性能指標(biāo)函數(shù)。
根據(jù)上述的數(shù)學(xué)變換,Gauss偽譜法離散最優(yōu)控制問題可以描述為:求離散狀態(tài)變量Xi、控制變量Uk和終端時(shí)刻tf,使得在滿足式(4)、式(6)~(8)的情況下,使得其性能指標(biāo)函數(shù)J,即式(9)最小。從而將最優(yōu)控制問題轉(zhuǎn)化為一般非線性規(guī)劃問題[14]。
1.2 分段高斯偽譜法
本文對(duì)火箭帶飛段、姿態(tài)調(diào)整段軌跡分別運(yùn)用Gauss偽譜法進(jìn)行規(guī)劃,通過在分段處設(shè)置連接點(diǎn)并加上一定的約束條件,對(duì)連接點(diǎn)進(jìn)行約束[9,15]。

(10)
(11)
式中:k=1,2,…,K,p=1,2,…,N,Dki∈Rm為微分矩陣。
邊界條件約束:
(12)
過程約束:
(13)
同時(shí),為保證各階段連接點(diǎn)的連續(xù)性,在連接點(diǎn)處應(yīng)滿足如下條件:
(14)
則分段Gauss偽譜法即是在滿足式(10)-式(14)的情況下來對(duì)多段軌跡進(jìn)行求解。
2 彈道優(yōu)化模型
2.1 動(dòng)力學(xué)模型
本文軌跡優(yōu)化問題所采用的動(dòng)力學(xué)模型如下:
(15)
式中:狀態(tài)量[Vxhθ]T為速度、射程、飛行高度、軌跡角,控制量α為迎角,狀態(tài)量與控制量對(duì)應(yīng)2.1節(jié)中的狀態(tài)變量x(t)和控制變量u(t)。m為系統(tǒng)總質(zhì)量,需要根據(jù)不同階段進(jìn)行切換;g為重力加速度;L和D分別為升力、阻力:
(16)
式中:Sref為參考面積;升力系數(shù)CL和阻力系數(shù)CD由馬赫數(shù)和攻角決定,通過氣動(dòng)參數(shù)表值得出;大氣密度ρ可通過國際標(biāo)準(zhǔn)大氣表查表得到。
2.2 約束條件和性能指標(biāo)
考慮到試驗(yàn)段引射火箭和發(fā)動(dòng)機(jī)工作的苛刻條件以及飛行器在結(jié)構(gòu)和熱防護(hù)的可靠性,飛行器需要滿足諸多過程約束以及終端約束。本文選取動(dòng)壓、過載、迎角作為過程約束,末端高度、馬赫數(shù)、彈道傾角作為邊界條件約束[8]。結(jié)合第2章中式(7)~(9)及式(12)~(14),在建模過程中需滿足以下條件:
2.2.1 過程約束
1)動(dòng)壓約束:
為了滿足飛行器結(jié)構(gòu)設(shè)計(jì)以及控制效率的要求,需要對(duì)動(dòng)壓進(jìn)行約束。
(17)
式中:q為動(dòng)壓,ρ為大氣密度,V為飛行速度。
2)過載約束:
由于飛行器機(jī)體結(jié)構(gòu)所能承受的過載有限,因此在全過程中對(duì)過載進(jìn)行約束,其中nx為軸向過載,nz為法向過載。
nxmin≤nx≤nxmax
nzmin≤nz≤nzmax
(18)
3)迎角約束:
由于飛行器結(jié)構(gòu)、引射火箭與發(fā)動(dòng)機(jī)的限制,同時(shí)為了滿足控制飛行器控制能力要求,需約束迎角。
αmin≤α≤αmax
(19)
式中:α為飛行器迎角。
2.2.2 邊界條件約束
為了滿足試驗(yàn)段引射火箭工作以及發(fā)動(dòng)機(jī)點(diǎn)火的要求,需約束終端彈道傾角θf、高度hf及速度Vf。
θfmin≤θf≤θfmax
(20)
hfmin≤hf≤hfmax
(21)
Vfmin≤Vf≤Vfmax
(22)
2.2.3 性能指標(biāo)
試驗(yàn)段需要以引射火箭作為動(dòng)力使飛行器正加速,應(yīng)盡量減小試驗(yàn)段阻力,選取末端高度最高為優(yōu)化性能指標(biāo):
J1=-Hf
(23)
同時(shí)為了保證試驗(yàn)段引射火箭點(diǎn)火,選取末端的速度最大為優(yōu)化性能指標(biāo):
J2=-Vf
(24)
兼顧軌跡的平滑性,將彈道傾角角速率的平方進(jìn)行積分作為性能指標(biāo):
(25)
最終的性能指標(biāo)為式(23)~(25)的加權(quán)和[16]:
J=w1J1+w2J2+w3J3
(26)
式中:w1,w2和w3為權(quán)重系數(shù),通過調(diào)節(jié)權(quán)系數(shù),使軌跡在速度最優(yōu)、高度最優(yōu)以及軌跡平滑性之間權(quán)衡,以規(guī)劃出合理軌跡。
3 軌跡優(yōu)化算例
基于某型高超聲速無人機(jī)及某型小型運(yùn)載火箭,分析并設(shè)計(jì)試驗(yàn)窗口并以此作為終端約束,利用Gauss偽譜法進(jìn)行軌跡設(shè)計(jì),并根據(jù)仿真結(jié)果,分析性能指標(biāo)對(duì)分離點(diǎn)以及試驗(yàn)段的影響。
3.1 試驗(yàn)窗口
引射火箭點(diǎn)火的最低馬赫數(shù)為2.5,引射火箭推力為8000N,為實(shí)現(xiàn)飛機(jī)正推力的要求,對(duì)比了軌跡角分別為-10°、-5°、0°、5°、10°情況下飛機(jī)加速度為0的馬赫數(shù)-高度關(guān)系曲線,如圖2所示。
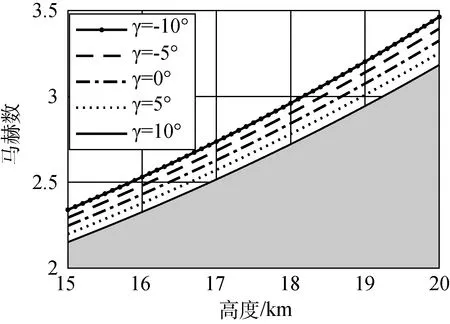
圖2 試驗(yàn)窗口
各曲線右下方區(qū)域?yàn)榧铀俣却笥?的試驗(yàn)窗口,當(dāng)高度一定時(shí),隨著軌跡角的增加,窗口最低馬赫數(shù)減小;馬赫數(shù)一定時(shí),隨著軌跡角的增加,窗口最低高度增加。綜合考慮,設(shè)計(jì)試驗(yàn)窗口為:
(27)
3.2 軌跡優(yōu)化
利用分段高斯偽譜法對(duì)火箭帶飛段與姿態(tài)調(diào)整段進(jìn)行設(shè)計(jì),飛行器總重400kg,火箭與飛機(jī)總重1856kg。
軌跡初始條件與終端條件如表1:
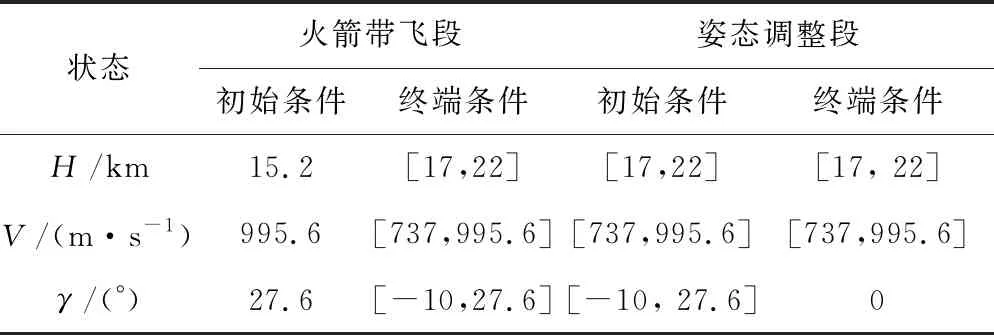
表1 約束條件
其中,括號(hào)中數(shù)值[min,max]分別對(duì)應(yīng)狀態(tài)量的上限與下限,無括號(hào)則表示狀態(tài)量數(shù)值確定。
控制約束選取-20°≤α≤20°;過載約束選取-3g≤nx≤g,-6g≤nz≤g;動(dòng)壓約束選取20kPa≤q2≤100kPa。
性能指標(biāo)按照2.2節(jié)中的式(26)選取,由于3種性能指標(biāo)數(shù)值量級(jí)不同,首先將J1×10-3、J2×10-2、J3×103使得3種性能指標(biāo)處于同一數(shù)量級(jí),保證權(quán)系數(shù)的改變能對(duì)總性能指標(biāo)產(chǎn)生明顯影響。利用控制變量法研究3種權(quán)系數(shù)對(duì)規(guī)劃軌跡的影響,選取參數(shù)1:w1=1,w2=1,w3=1;參數(shù)2:w1=1,w2=20,w3=1;參數(shù)3:w1=20,w2=1,w3=1三種參數(shù)進(jìn)行仿真,仿真結(jié)果如圖3所示。考慮引射火箭推力8000N,以規(guī)劃結(jié)果的終端狀態(tài)作為試驗(yàn)段初始狀態(tài)時(shí)所對(duì)應(yīng)的初始加速度見表2。

表2 試驗(yàn)段初始加速度
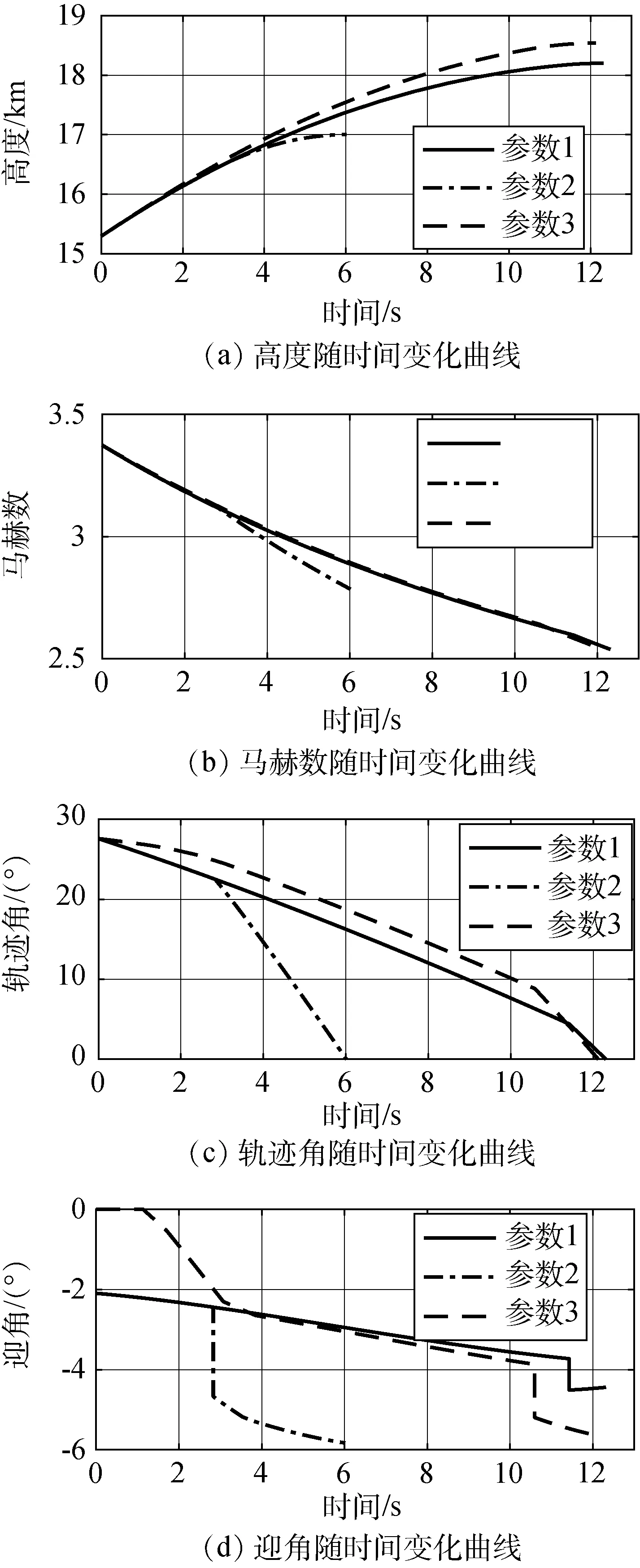
圖3 規(guī)劃結(jié)果
從圖3中的規(guī)劃結(jié)果可以看出,三種參數(shù)下規(guī)劃軌跡除迎角外各狀態(tài)量隨時(shí)間變化平緩,而迎角突變點(diǎn)即為分離點(diǎn),由于此時(shí)飛行器與火箭分離,參考模型發(fā)生變化,發(fā)生突變是合理的。
當(dāng)彈道傾角權(quán)重w3不變時(shí),增大速度權(quán)重w2會(huì)使分離點(diǎn)提前,末端速度增加,末端高度減小,使得末端阻力增加,初始加速度大幅度減小,不利于試驗(yàn)段加速;而增大高度權(quán)重w1會(huì)使分離點(diǎn)推遲,末端高度增加,但對(duì)末端速度影響較小,從而減小末端阻力,增大初始加速度,有利于試驗(yàn)段加速。
此方法能夠按照飛行任務(wù)剖面設(shè)計(jì)軌跡,最大程度發(fā)揮飛行器與運(yùn)載火箭的性能,同時(shí)可以通過改變約束條件與性能指標(biāo)權(quán)重,更為精細(xì)地調(diào)整彈道。
經(jīng)過多次對(duì)比后選取w1=1,w2=25,w3=1進(jìn)行規(guī)劃,并將結(jié)果與火箭助推段、試驗(yàn)窗口段、無動(dòng)力返回段結(jié)合,最終飛行任務(wù)剖面如圖4所示。
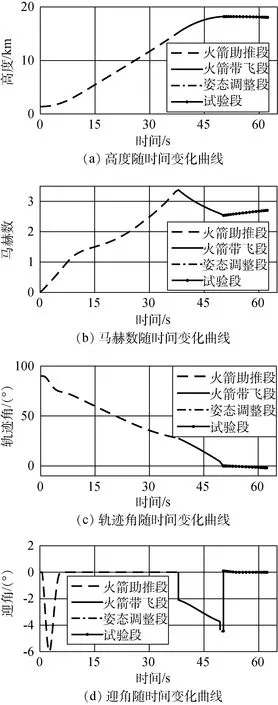
圖4 飛行任務(wù)剖面
整個(gè)任務(wù)剖面與圖1一致,飛行器與助推火箭結(jié)合,垂直發(fā)射,加速爬升至馬赫數(shù)3.37、高度15.2km、軌跡角27.6°;之后助推火箭燃料耗盡,組合體減速爬升至馬赫數(shù)2.6、高度18.17km;飛行器與助推火箭分離,飛行器拉平,緩慢減速爬升至馬赫數(shù)2.54,高度18.2km,達(dá)到試驗(yàn)窗口;引射火箭點(diǎn)火,在12 s的工作時(shí)間內(nèi)平飛加速至Ma2.7,整個(gè)軌跡狀態(tài)量變化平緩,符合任務(wù)要求。
4 結(jié)論
1)選取末端高度最高、速度最大、軌跡平滑作為單項(xiàng)性能指標(biāo),以其加權(quán)和作為總性能指標(biāo),改變單項(xiàng)性能指標(biāo)權(quán)重系數(shù)能夠改變分離點(diǎn),以得到最優(yōu)軌跡。經(jīng)過多次對(duì)比后選取高度、速度和彈道傾角權(quán)重系數(shù)分別為w1=1,w2=25,w3=1進(jìn)行規(guī)劃;
2)仿真結(jié)果表明,通過該方法得到的彈道狀態(tài)變量變化平緩,可得到飛行器馬赫數(shù)2.54,高度18.2km的試驗(yàn)窗口,符合引射火箭點(diǎn)火要求。引射火箭點(diǎn)火后工作12s,飛行器加速至Ma2.7。滿足約束條件,可以為飛行器與運(yùn)載器分離軌跡規(guī)劃提供參考。