移動(dòng)機(jī)器人避障模糊控制仿真研究
2021-11-20 12:08:34馬輝
山西能源學(xué)院學(xué)報(bào) 2021年5期
關(guān)鍵詞:移動(dòng)機(jī)器人仿真
馬輝

【摘 要】 當(dāng)前,移動(dòng)機(jī)器人在躲避障礙物過程中,導(dǎo)致輸出誤差較大,不能很好地跟蹤期望運(yùn)動(dòng)軌跡。本文借助于仿真軟件MATLAB對(duì)機(jī)器人避障效果進(jìn)行驗(yàn)證,結(jié)果表明:采用傳統(tǒng)PID控制器,機(jī)器人雖然能夠避開障礙物,但是輸出誤差較大,控制系統(tǒng)不穩(wěn)定。采用模糊控制器,機(jī)器人不僅能夠躲避障礙物,而且輸出誤差較小,控制系統(tǒng)相對(duì)穩(wěn)定。采用模糊控制器,移動(dòng)機(jī)器人自適應(yīng)調(diào)節(jié)能力強(qiáng),不僅可以躲避障礙物的干擾,而且輸出誤差較小。
【關(guān)鍵詞】 移動(dòng)機(jī)器人;模糊控制器;二次線性調(diào)節(jié)器;避障;仿真
【中圖分類號(hào)】 TH112 【文獻(xiàn)標(biāo)識(shí)碼】 A 【文章編號(hào)】 2096-4102(2021)05-0094-03
一直以來,控制系統(tǒng)都是阻礙機(jī)器人發(fā)展的重要問題,必須對(duì)機(jī)器人控制系統(tǒng)進(jìn)行改進(jìn),才能在未來發(fā)展中占據(jù)市場。對(duì)此,本文建立了移動(dòng)機(jī)器人運(yùn)動(dòng)模型簡圖,結(jié)合理論和實(shí)際運(yùn)動(dòng)軌跡定義了機(jī)器人運(yùn)動(dòng)誤差模型,將誤差模型進(jìn)行線性化。
1移動(dòng)機(jī)器人
1.1運(yùn)動(dòng)學(xué)模型
移動(dòng)機(jī)器人簡圖模型在直角坐標(biāo)系中如圖1所示。
假設(shè)移動(dòng)機(jī)器人不能橫向滑動(dòng),其運(yùn)動(dòng)學(xué)模型如下:
[xyθ=cosθ? ? 0sinθ? ? 0? ?0? ? ? ?1vw]? ? ? ? ?(1)
式中:x、y、θ為移動(dòng)機(jī)器人實(shí)際運(yùn)動(dòng)坐標(biāo);v、w分別為實(shí)際線速度和角速度。
1.2運(yùn)動(dòng)誤差模型
移動(dòng)機(jī)器人運(yùn)動(dòng)誤差定義為:
[exeyeθ=? ?cosθ? ? ?sinθ? ? 0-sinθ? ? cosθ? ? 0? ? ? 0? ? ? ? ?0? ? ? ? ?1xr-xyr-yθr-θ]? ?(2)
式中:xr、yr、θr為移動(dòng)機(jī)器人參考運(yùn)動(dòng)坐標(biāo)。
考慮到移動(dòng)機(jī)器人具有如式(1)所示的運(yùn)動(dòng)學(xué)模型,通過推導(dǎo)式(2)得到如下運(yùn)動(dòng)學(xué)模型:
[exeyeθ=sineθ? ? 0coseθ? ? 0? ? ?0? ? ? ?1vrwr+-1? ? ? ey0? ? ? -ex0? ? ? -1 u]? (3)
式中:vr、wr分別為參考線速度和角速度;u為反饋控制輸入。
u定義如下所示:
[u=uF+uB=vrcoseθwr+vw] (4)
式中:uF、uB分別為控制器輸入和輸出。
將上述模型線性化后可以得到如下所示:
[exeyeθ=? ?0? ? ?wr? ? 0-wr? ? 0? ? ?vr? ?0? ? ?0? ? ?0exeyeθ+-1? ? ? 0? 0? ? ? 0? 0? ? -1vw] (5)
方程式(5)為狀態(tài)空間形式,定義為e′=Ae+Bu。
2控制器設(shè)計(jì)
2.1 T-S模糊建模
T-S模糊模型是Takagi和Sugeno提出的一種多模型建模方法。方程(5)所描述系統(tǒng)的T-S模糊模型的第i條規(guī)則如下:
如果w1(t)為Fi1,···,wg(t)為Fig,那么e(t)′=Aie(t) +Biu(t)。
w1(t),w2(t),···,wg(t)為假定變量,F(xiàn)ig為模糊集,i=1,2,···,L。L為模糊規(guī)則個(gè)數(shù),并且Ai∈Rn×n,Bi∈Rn×m分別為狀態(tài)矩陣和輸入矩陣。
整個(gè)模糊系統(tǒng)推斷如下:
[e(t)=i=1Lμi(w(t))Aie(t)+Biu(t)i=1Lμi(w(t))] (6)
令hi=μi/Σμi為第i個(gè)模糊規(guī)則的激活函數(shù),方程式(6)被寫成:
[e(t)=i=1Lhi(w(t))Aie(t)+Biu(t)] (7)
式中:w(t)=[w1(t),w2(t),···,wg(t)]。
對(duì)于i=1,2,···,L,μ(μi(t))≥0,激活函數(shù)具有以下性質(zhì):
[i=1Lhi(w(t))=1]? (8)
T-S模糊控制器的第i條規(guī)則如下:
如果w1(t)為Fi1,···,wg(t)為Fig,那么u(t)= -Kie(t)。其中,i=1,2,···,L。Ki為狀態(tài)反饋增益。
通過與全局模糊系統(tǒng)的匹配,將全局模糊控制器寫成:
[u(t)=-i=1Lhi(w(t))kie(t)] (9)
將式(9)代入式(7),得到閉環(huán)系統(tǒng):
[e(t)=i=1Li=1Lhi(w(t))hj(w(t))Ai-BiKje(t)]
(10)
2.2線性二次型調(diào)節(jié)器
線性二次型調(diào)節(jié)器是設(shè)計(jì)線性狀態(tài)反饋控制器最常用的現(xiàn)代控制方法。它包括尋找一個(gè)使二次成本函數(shù)最小化并保證線性系統(tǒng)穩(wěn)定性的最優(yōu)控制律。由于我們使用的是誤差狀態(tài)空間模型,控制問題的形式如下,計(jì)算最優(yōu)控制律為:
[u(t)=-Ke(t)]? ? ? (11)
使二次型性能指標(biāo)最小化為:
[J=∞t0(eTQe+uTRu)dt] (12)
控制線性系統(tǒng)為:
[e(t)=Ae(t)+Bu(t)]? ?(13)
其中:
[K=R-1BTP]? ? ? ? (14)
P是下列方程的解,如下所示:
[PA=ATP+Q-PBR-1BTP=0] (15)
式中:Q為控制收斂速度的半正定矩陣;R為懲罰控制輸入的正定矩陣。
該控制程序?qū)-S模糊模型的每個(gè)子系統(tǒng)都適應(yīng)。采用線性二次型調(diào)節(jié)器作為避障控制器,通過模糊邏輯控制器實(shí)時(shí)調(diào)整其權(quán)值矩陣。
移動(dòng)機(jī)器人的控制輸入如下:
[v=(1-F)vT+Fvobw=(1-F)wT+Fwob] (16)
由于機(jī)器人具有前進(jìn)速度和轉(zhuǎn)向能力,必須對(duì)其加以限制,以防止移動(dòng)機(jī)器人打滑或側(cè)翻。
假設(shè)速度和加速度限制為:
[v≤vmaxw≤wmaxaT=dv/dt≤aT,maxaL-kv2≤aL,max] (17)
式中:vmax和wmax分別為最大線速度和角速度;aT、aL、aT,max和aL,max分別為縱向加速度、橫向加速度、最大縱向加速度和橫向加速度;κ=v/w。
實(shí)際速度(vc,wc)及實(shí)際加速度(aTc和aLc)應(yīng)該滿足如下條件:
如果|v|/vmax>1,并且|v|/vmax>|w|/wmax,那么
[vc=sign(v)vmaxwc=wvmax/vaTc=sign(aT)aT,maxaLc=aLaT,max/a]? ? ? ? ? ? ? ? ?(18)
如果|w|/wmax>1,并且|w|/wmax>|v|/vmax,那么
[vc=vwmax/wwc=sign(w)wmaxaTc=aTaL,max/aLaLc=sign(aL)aL,max]? ? ? ? ?(19)
如果|v|/vmax<1,并且|w|/wmax<1,那么
[vc=vwc=waTc=aTaLc=aL] (20)
在所提出的控制系統(tǒng)時(shí),必須根據(jù)機(jī)器人的摩擦力和質(zhì)量,選擇合適的參數(shù)aT,max和aL,max,以保證機(jī)器人不會(huì)打滑。
3誤差仿真
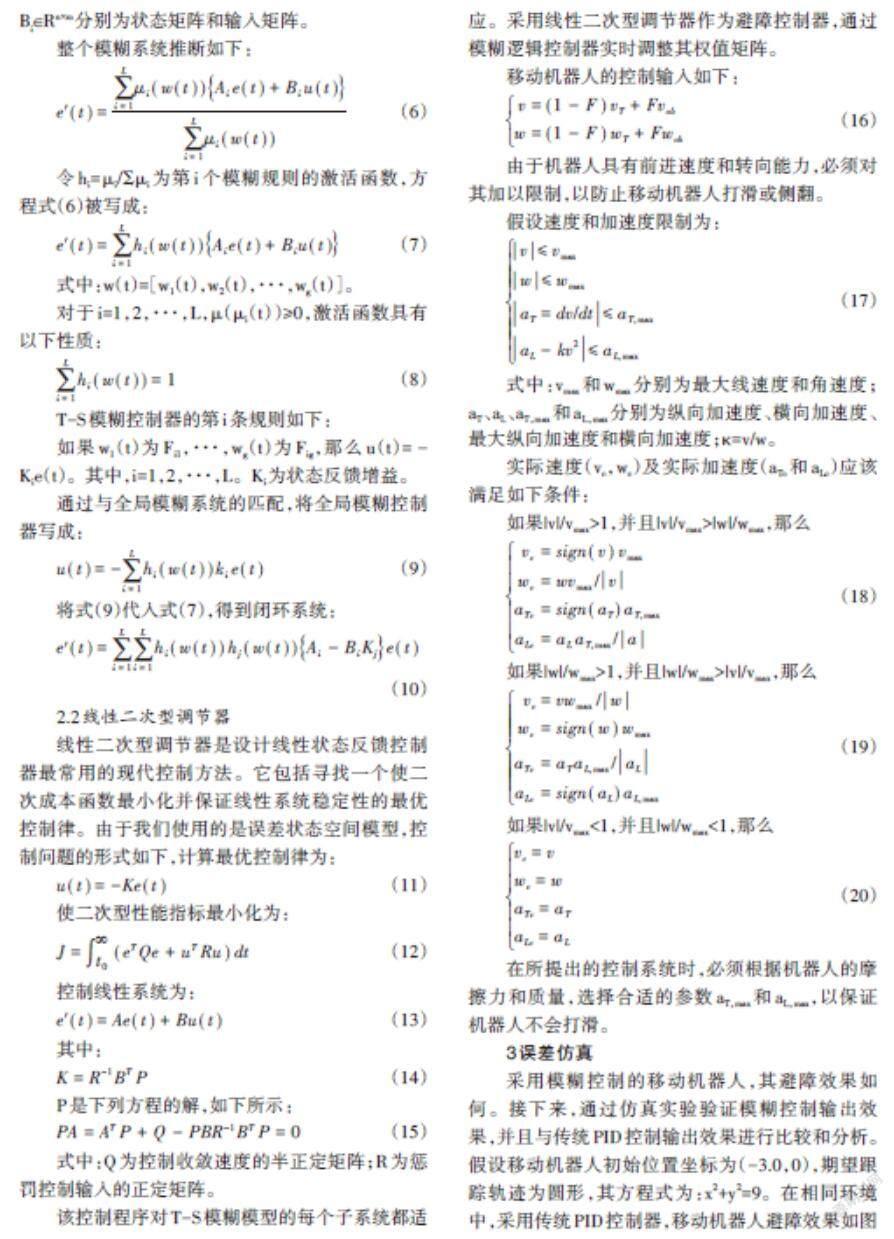
采用模糊控制的移動(dòng)機(jī)器人,其避障效果如何。接下來,通過仿真實(shí)驗(yàn)驗(yàn)證模糊控制輸出效果,并且與傳統(tǒng)PID控制輸出效果進(jìn)行比較和分析。假設(shè)移動(dòng)機(jī)器人初始位置坐標(biāo)為(-3.0,0),期望跟蹤軌跡為圓形,其方程式為:x2+y2=9。在相同環(huán)境中,采用傳統(tǒng)PID控制器,移動(dòng)機(jī)器人避障效果如圖2所示。采用模糊控制器,移動(dòng)機(jī)器人避障效果如圖3所示。
根據(jù)圖2可知,采用傳統(tǒng)PID控制器,移動(dòng)機(jī)器人雖然能夠成功躲避障礙物,但是,移動(dòng)機(jī)器人在避開障礙物的同時(shí),導(dǎo)致輸出誤差較大。機(jī)器人在軌跡跟蹤過程中,控制系統(tǒng)不穩(wěn)定。
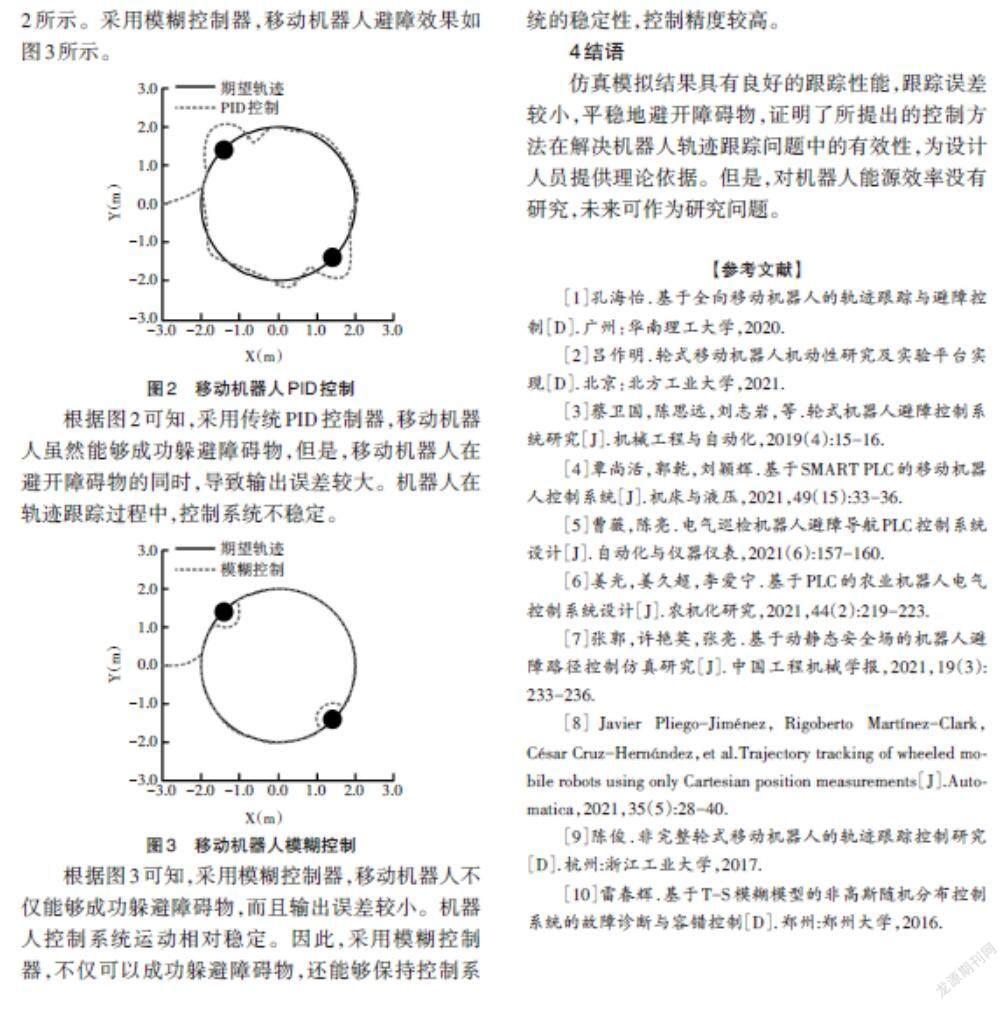
根據(jù)圖3可知,采用模糊控制器,移動(dòng)機(jī)器人不僅能夠成功躲避障礙物,而且輸出誤差較小。機(jī)器人控制系統(tǒng)運(yùn)動(dòng)相對(duì)穩(wěn)定。因此,采用模糊控制器,不僅可以成功躲避障礙物,還能夠保持控制系統(tǒng)的穩(wěn)定性,控制精度較高。
4結(jié)語
仿真模擬結(jié)果具有良好的跟蹤性能,跟蹤誤差較小,平穩(wěn)地避開障礙物,證明了所提出的控制方法在解決機(jī)器人軌跡跟蹤問題中的有效性,為設(shè)計(jì)人員提供理論依據(jù)。但是,對(duì)機(jī)器人能源效率沒有研究,未來可作為研究問題。
【參考文獻(xiàn)】
[1]孔海怡.基于全向移動(dòng)機(jī)器人的軌跡跟蹤與避障控制[D].廣州:華南理工大學(xué),2020.
[2]呂作明.輪式移動(dòng)機(jī)器人機(jī)動(dòng)性研究及實(shí)驗(yàn)平臺(tái)實(shí)現(xiàn)[D].北京:北方工業(yè)大學(xué),2021.
[3]蔡衛(wèi)國,陳思遠(yuǎn),劉志巖,等.輪式機(jī)器人避障控制系統(tǒng)研究[J].機(jī)械工程與自動(dòng)化,2019(4):15-16.
[4]覃尚活,郭乾,劉穎輝.基于SMART PLC的移動(dòng)機(jī)器人控制系統(tǒng)[J].機(jī)床與液壓,2021,49(15):33-36.
[5]曹薇,陳亮.電氣巡檢機(jī)器人避障導(dǎo)航PLC控制系統(tǒng)設(shè)計(jì)[J].自動(dòng)化與儀器儀表,2021(6):157-160.
[6]姜光,姜久超,李愛寧.基于PLC的農(nóng)業(yè)機(jī)器人電氣控制系統(tǒng)設(shè)計(jì)[J].農(nóng)機(jī)化研究,2021,44(2):219-223.
[7]張郭,許艷英,張亮.基于動(dòng)靜態(tài)安全場的機(jī)器人避障路徑控制仿真研究[J].中國工程機(jī)械學(xué)報(bào),2021,19(3): 233-236.
[8]Javier Pliego-Jiménez,Rigoberto Martínez-Clark,César Cruz-Hernández,et al.Trajectory tracking of wheeled mobile robots using only Cartesian position measurements[J].Automatica,2021,35(5):28-40.
[9]陳俊.非完整輪式移動(dòng)機(jī)器人的軌跡跟蹤控制研究[D].杭州:浙江工業(yè)大學(xué),2017.
[10]雷春輝.基于T-S模糊模型的非高斯隨機(jī)分布控制系統(tǒng)的故障診斷與容錯(cuò)控制[D].鄭州:鄭州大學(xué),2016.
猜你喜歡
北京航空航天大學(xué)學(xué)報(bào)(2022年6期)2022-07-02 01:59:12
四川輕化工大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年3期)2021-08-30 06:37:02
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
科技資訊(2016年18期)2016-11-15 20:09:22
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 23:25:33
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
企業(yè)導(dǎo)報(bào)(2016年6期)2016-04-21 17:56:19
智能系統(tǒng)學(xué)報(bào)(2015年4期)2015-12-27 09:38:35
