盤式剎車與齒輪耦合動力學模型及動力學行為
2021-11-22 11:09:52韋堯中沈銀華
機械設計與制造 2021年11期
關鍵詞:模型
韋堯中,向 東,沈銀華
(清華大學機械工程系,北京 100084)
1 前言
以驅動裝置,變速齒輪箱,盤式剎車裝置,負載為傳動形式的傳動鏈形式廣泛存在于汽車、風電裝備中。傳動鏈經常會受到盤式剎車裝置緊急剎車的影響,如風電傳動鏈會因為風機部件故障和風速異常等原因緊急剎車。緊急剎車時會給傳動系統帶來沖擊力和沖擊力矩,給與其固聯的齒輪副帶來非正常工況,齒輪系統在這種非正常工況下表現出異常振動,甚至出現輪齒非正常嚙合等現象,影響齒輪正常壽命,需要對其進行研究。
國內外眾多學者在齒輪嚙合過程、剎車系統剎車過程的動力學行為進行了大量研究。文獻[1]通過沿齒寬方向切片將斜齒輪轉換成沿齒寬分布的直齒輪計算斜齒輪時變嚙合剛度。文獻[2-3]在齒輪動力學行為計算過程中考慮摩擦力影響,表明摩擦力是嚙合過程重要影響因素。文獻[4-5]在計算過程中考慮輪齒齒側間隙,并證明其在齒輪嚙合過程中的影響。盤式剎車系統研究方面,文獻[6-7]建立盤式剎車裝置剎車盤和摩擦片的動力學模型,并考慮二者間時變摩擦系數計算得到剎車過程中的轉矩波動等情況。上述研究均在齒輪嚙合、盤式剎車系統剎車過程建立了精確的計算模型,但都是針對各個部件本身進行討論,缺乏二者耦合情況下動力學行為的研究。
建立包含驅動裝置、齒輪箱、剎車系統、負載的耦合多體動力學模型以表征二者耦合情況下系統的動力學行為。同時為精確表征行為細節,對剎車系統和齒輪系統均進行詳細建模。在對剎車系統建模過程中考慮剎車盤摩擦系數變化,在對齒輪系統建模的過程中,考慮齒輪副嚙合過程的時變嚙合剛度,齒側間隙和摩擦力等主要因素,并考慮發生拍擊輪齒兩側嚙合剛度及力方向的差異。之后以某實驗臺為具體對象進行仿真分析并進行實驗驗證,對比實驗和仿真剎車過程中振動、轉速轉矩變化等信息驗證模型的準確性。
2 傳動鏈多體動力學模型
包含驅動端、單級平行軸齒輪箱、剎車系統、負載的多體動力學模型,如圖1所示。
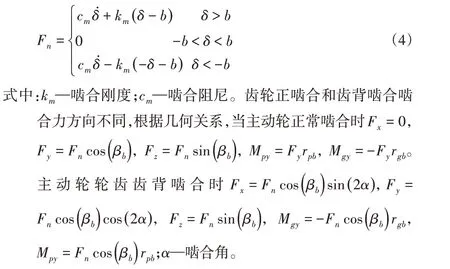
圖1中:從左下至右上的傳動部件依次為原動機、傳動軸、主動齒輪、被動齒輪,傳動軸、剎車裝置和負載。圖中:y軸方向與正常嚙合嚙合面方向重合。其中主動斜齒輪為大齒輪且為右旋齒輪。動力學方程表示為:

圖1 多體動力學模型Fig.1 Dynamic Model

式中:Ji,θi,mi,xi,yi,zi—部件i的轉動慣量,轉角,質量,x軸,y軸和z軸方向的位移,下標i=p,g,b1,b2,1,0—對應小齒輪,大齒輪,剎車系統摩擦片,剎車系統摩擦盤,負載端和驅動端。kij,cij—部件i在j方向上的支撐剛度和阻尼,i的含義與上文相同,j=x,y,z分別對應x軸,y軸和z軸方向;Fj—嚙合力在j方向上的分力;T0(t)—驅動轉矩;N(t)—摩擦片制動壓力;μ—剎車系統摩擦系數;Mpy,Mgy—嚙合力對大小齒輪的彎矩;Mfp,Mfg—兩個齒輪摩擦力矩;fij—齒輪i在j方向上的摩擦力。
模型中的嚙合力和摩擦力隨齒輪嚙合情況變化。其中,嚙合力受到嚙合狀態、齒輪嚙合剛度的影響,二者均為時變量。摩擦力與接觸點嚙合力、運動狀態和幾何形貌有關,也是時變量。下面介紹齒輪嚙合狀態、時變嚙合剛度影響下嚙合力計算方法,與嚙合力、運動狀態和幾何形貌相關的摩擦力計算方法以及剎車盤變摩擦系數計算方法。
2.1 嚙合力計算
嚙合力大小與圖1中P,G兩點相對位移有關,由二者幾何位置關系可得兩點相對齒面法向位移和相對速度為:

式中:=yp+zptan(βb)+θprpb—小齒輪在y方向上的位移;=yg+zgtan(βb)+θgrgb—大齒輪在y方向上的位移;e—嚙合誤差;βb—基圓螺旋角;rpb,rgb—小齒輪和大齒輪基圓半徑。
由于齒輪存在圖2所示齒側間隙2b,文中b=10-5mm,當嚙合點間相對位移大于二分之一側隙即δ>b時,主動齒輪正常嚙合齒面參與嚙合,當-b<δ<b時,為脫齒狀態,輪齒間不接觸,δ<-b時為非正常嚙狀態,主動齒輪齒背參與嚙合。

圖2 齒側間隙示意圖Fig.2 Backlash of Gear Pair
嚙合力計算采用KELVIN-VOIGT模型,可表示為:
km與齒輪實時嚙合位置有關。對直齒輪,詳細計算方法見文獻[8],計算過程中需計算輪齒彎曲剛度和齒根附加變形剛度,二者計算使用參量分別見圖3(a)和圖3(b),由于計算過程中均用到關鍵嚙合參數αm,而,其中αi—該點的壓力角,s,r,αn—分度圓齒厚、半徑和壓力角。故將嚙合點壓力角作為剛度計算重要中間參量。
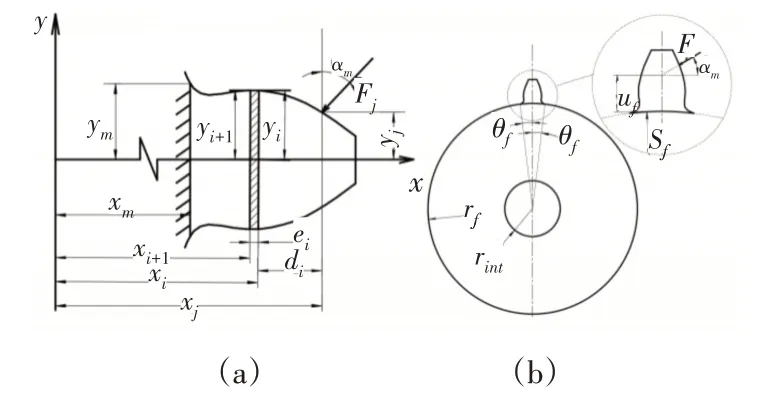
圖3 齒輪彎曲剛度和齒根附加變形剛度計算參數Fig.3 Parameters of Bending Stiffness and Fillet-Foundation Stiffness
對斜齒輪,嚙合剛度解析算法采用沿齒寬方向切片的方法處理,具體方法見文獻[1]。切片后,各個齒片嚙合剛度按照直齒輪計算,各個齒片嚙合位置以端面為基準,可根據嚙合面內各個齒片嚙合點與端面嚙合點相對位置求出,并依此求出各個齒片嚙合點的壓力角,將各個齒片看成直齒輪進行計算,最后通過各個齒片嚙合剛度加和即可求出km,如式(5)。

式中:n—沿齒寬切片數目,kbgj,kfgj,kbpj,kfpj—第j片嚙合輪齒的大齒輪輪齒彎曲剛度,齒根附加變形剛度,小齒輪輪齒彎曲剛度,齒根附加變形剛度。kh為接觸剛度,以上參數計算均按照直齒輪計算方法,在此不做贅述。
由于輪齒發生拍擊時,同一輪齒位置齒面和齒背對應的嚙合剛度不同,需分別計算,如圖4所示。正常嚙合線為N1N2,嚙合點為A點。齒背嚙合時嚙合線為M2M1,嚙合點為B點,前文所述嚙合剛度計算時通常使用嚙合點壓力角,兩個點的壓力角轉換關系為:

圖4 正常及非正常嚙合過程Fig.4 Normal and Abnormal Meshing Process

式中:αA,αB—嚙合點A和嚙合點B的壓力角;sgb—大齒輪基圓齒厚;sN1M1—大齒輪N1M1段弧長。
2.2 齒輪嚙合摩擦力計算
根據文獻[3]提出的算法,齒輪摩擦系數為:

式中:μ—齒輪間摩擦系數;
μBDR—邊界油膜彈流潤滑平均系數,取0.08。
μEHL—全油膜潤滑平均摩擦系數。參考文獻[9],計算式如下:
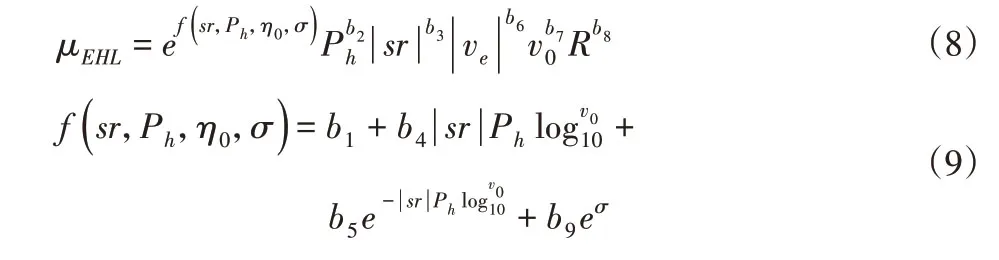
式中:sr—齒輪副滑滾比;
ve—齒輪相對滑動速度;
η0—常溫下潤滑油動力粘度;
σ—齒廓表面粗糙度均方根;
σp和σg—大小齒輪表面粗糙度;
R—嚙合點出處當量曲率半徑,其中rg,rp—大小齒輪嚙合處曲率半徑,bk取值,如表1所示。Ph—最大赫茲接觸應力,0.5。
其中,Fn—表面收到的實際壓力;E—彈性模量;ε—泊松比;L—齒寬;Tmin最小油膜厚度計算如下[10]:

式中:vm—齒面平均速度。
對斜齒輪每一個嚙合點的嚙合力、速度和曲率半徑關系各不相同,利用前文所述切片方法將齒輪沿齒寬離散,對每個齒片按照直齒輪處理即可求得各個嚙合點的摩擦計算條件。當齒輪處于正嚙合狀態時,;齒背嚙合時,方向根據齒面切向相對值確定。Mfg,Mfp使用各個嚙合點摩擦力與摩擦力臂乘積計算得到,在此不贅述。
2.3 剎車盤摩擦力計算
剎車盤摩擦系數計算采用經典STRIBECK 模型[11],剎車盤與摩擦片相對速度為0時為粘滯狀態,此時摩擦力計算式如下:

式中:fs—最大靜摩擦力;
fe—切向力。
當相對速度不為0時,摩擦系數計算如下:

式中:μk—滑動摩擦系數,取0.25;
μs—最大靜摩擦系數,取0.4;
v—摩擦塊和剎車盤的相對運動速度;
vs—STRIBECK 速度,文中取10m/s;γ—粘性系數,文中取0.0009,摩擦力方向由二者相對速度方向確定。
3 求解結果及驗證
3.1 仿真參數及載荷
仿真參數設定,如表1所示。表1中大小齒輪質量和轉動慣量均將固聯的齒輪軸和聯軸器計算在內,參數符號與前文相同。
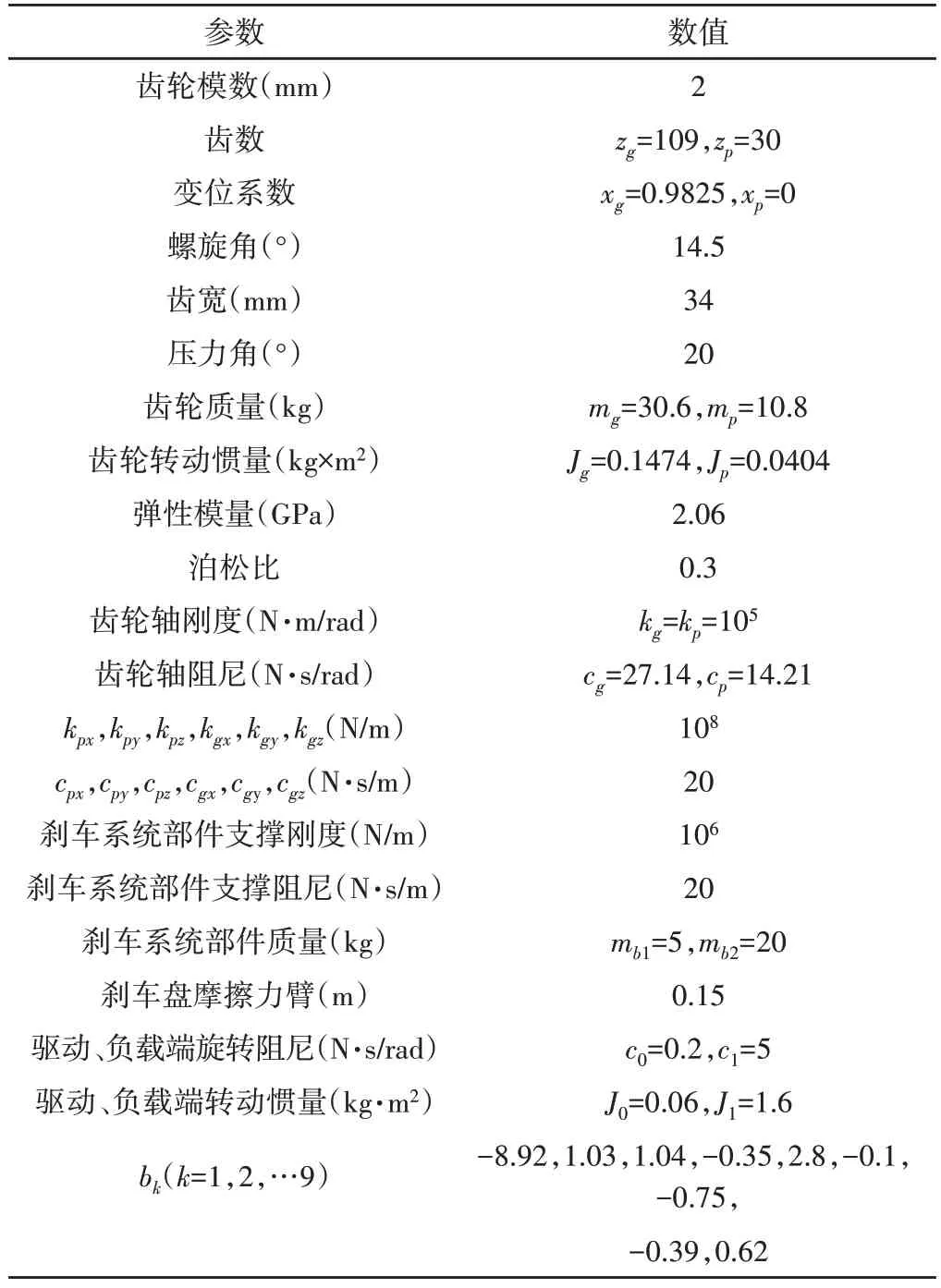
表1 仿真參數Tab.1 Simulation Parameter
驅動轉矩和摩擦片壓力隨時間變化,如圖5所示。其中驅動轉矩T0曲線根據實際驅動轉矩曲線,如圖6所示。

圖5 仿真載荷曲線Fig.5 Simulation Load Curve

圖6 實驗載荷曲線Fig.6 Experiment Load Curve
由于關注剎車過程,實際運行時扭矩上升狀態和扭矩平穩狀態時間壓縮,但保持原有變化趨勢,用9段不同的函數表示,摩擦片壓力Fn用3段函數表示。式(1)所示動力學方程使用NEWMARK法解,時間步長取10-7s,仿真時間1.2s,輪齒沿齒寬方向切片數為200,當轉速下降到0時,根據實驗情況將負載端抱死。
3.2 仿真結果及討論
根據前文所述仿真參數和仿真條件,計算得到P,G兩點相對位移差δ,從動齒輪轉速和y軸方向加速度分別如圖7(a),7(b),7(c)所示。圖7(a)中,δ>10-5mm時,主動齒輪正常嚙合齒面參與嚙合,當-10-5mm <δ<10-5mm 時,輪齒間不接觸,δ<-10-5mm時為非正常嚙狀態,主動齒輪齒背參與嚙合。由圖7可以看出,第0.884s時,從動輪轉速降到6.6rad/s,同時,齒輪軸向加速度增大,之后齒輪開始出現脫齒,齒面出現碰撞,當齒輪轉動停止時振動最大。剎車過程使齒輪轉速降低,當轉速低至一定程度時,輪齒出現拍擊,并造成振動幅度增大。

圖7 接觸點相對位移、轉速、轉矩仿真結果Fig.7 Simulation Results of Contact Points Relative Displacement,Rotating Speed and Torque
3.3 仿真結果驗證
針對圖1所示多體動力學模型搭建動力學實驗臺,實驗臺結構簡化圖,如圖8所示。實驗臺結構參數與表1保持一致。實驗臺測量參數為輸入軸轉矩,輸出軸轉速,從動輪軸端振動。
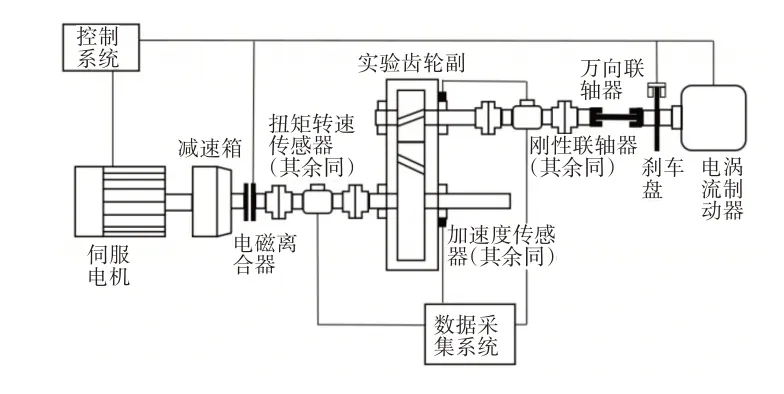
圖8 實驗傳動臺結構圖Fig.8 Experiment Drive Train Structure
實驗臺輸出軸轉速,輸出軸軸端振動情況,如圖9所示。圖9中,剎車時間為第4.76s,由于電磁離合器的并未完全消磁,使得電機依舊能夠提供轉矩使得轉矩上升。根據圖9(a)和圖9(b)當輸出軸轉速下降到170r/min時,從動齒輪軸端振動增大,當輸出軸轉速為0時,振動達到最大,之后逐漸衰減,與仿真過程一致。

圖9 轉速、轉矩實驗結果Fig.9 Experiment Result of Rotating Speed and Torque
4 結論
通過建立齒輪、盤式剎車裝置的耦合動力學模型,通過仿真計算揭示盤式剎車裝置在制動時,齒輪在低速狀態會產生拍擊現象,并造成軸端振動加劇。之后通過搭建與模型一致的實驗臺,并進行剎車實驗,實驗結果表明,緊急剎車過程中當齒輪轉速降低到一定程度時,齒輪軸端振動會加劇,齒輪在該狀態下發生了非正常嚙合,說明本文所述仿真模型可以分析齒輪和盤式剎車系統耦合動力學行為。
并通過仿真和實驗說明在剎車工況下,齒輪在低轉速時會發生非正常振動現象,影響齒輪嚙合。研究結果為今后優化剎車策略提供模型支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
