低劑量CT透視遙控穿刺機(jī)器人系統(tǒng)引導(dǎo)穿刺體模的可行性
2021-11-23 09:26:46何曉鋒肖越勇張嘯波魏穎恬張忠亮薛曉東張師聞
中國介入影像與治療學(xué) 2021年11期
關(guān)鍵詞:劑量
何曉鋒,肖越勇,張 肖,張嘯波,張 欣,魏穎恬,張忠亮,薛曉東,張師聞
(中國人民解放軍總醫(yī)院第一醫(yī)學(xué)中心放射診斷科,北京 100853)
CT引導(dǎo)下介入微創(chuàng)治療指在CT設(shè)備引導(dǎo)和監(jiān)測(cè)下進(jìn)行經(jīng)皮穿刺治療,廣泛用于腫瘤穿刺活檢和原位滅活[1-3]。目前臨床穿刺多為徒手盲穿或以各種導(dǎo)航設(shè)備[4-5]輔助穿刺,均存在誤差。本研究觀察自行研發(fā)的低劑量CT透視遙控穿刺機(jī)器人系統(tǒng)穿刺靶點(diǎn)的準(zhǔn)確性、精確性和輻射劑量,并與常規(guī)CT引導(dǎo)穿刺比較慢,評(píng)價(jià)其應(yīng)用價(jià)值。
1 材料與方法
1.1 材料 半身仿真人體模型(匡特人體模型0210,材料為硅膠),包括模擬皮膚、肝臟及肝臟腫瘤;17G穿刺套管針(日本TSK株式會(huì)社),長9.5 cm。
1.2 儀器與方法 采用Philips Brilliance TM Big Bore 16排大孔徑螺旋CT,孔徑85 cm,具有透視功能,將透視腳踏板線延長至CT操作室。
1.2.1 機(jī)器人穿刺系統(tǒng) 自主研發(fā)的機(jī)器人穿刺系統(tǒng)由遙控操作臺(tái)、速度控制面板、機(jī)械臂、持針器及場(chǎng)景顯示系統(tǒng)組成(圖1~3)。①遙控操作臺(tái):用于發(fā)出操作指令,包括進(jìn)針,平移(頭側(cè)、足側(cè)/左右),旋轉(zhuǎn)(頭側(cè)、足側(cè)/左右)及急停;②速度控制面板:通過觸摸平板調(diào)整操作指令速度;③機(jī)械臂:改良后的Universal Robots公司UR5e機(jī)械臂,具有6個(gè)自由度,固定于自制穩(wěn)定底座;④持針器:用于夾持和固定穿刺針,包括夾持臂和固定夾;夾持臂由具有高透射性材料加工而成;固定夾由尼龍材料通過3D打印制成,無X線偽影;⑤場(chǎng)景顯示系統(tǒng):機(jī)器人周圍配備4個(gè)攝像頭,以實(shí)時(shí)顯示機(jī)器人及受檢者,實(shí)現(xiàn)醫(yī)師近臺(tái)穿刺場(chǎng)景。
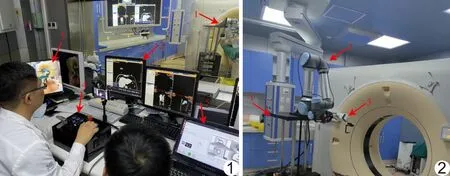
圖1 操作間布局 1.掃描室內(nèi)機(jī)器人機(jī)械臂及底座; 2.CT控制室內(nèi)監(jiān)視器; 3.手術(shù)場(chǎng)景顯示器; 4.遙控操作臺(tái); 5.速度控制面板 圖2 機(jī)器人主體 1.可升降機(jī)械臂底座; 2.機(jī)械臂; 3.持針器
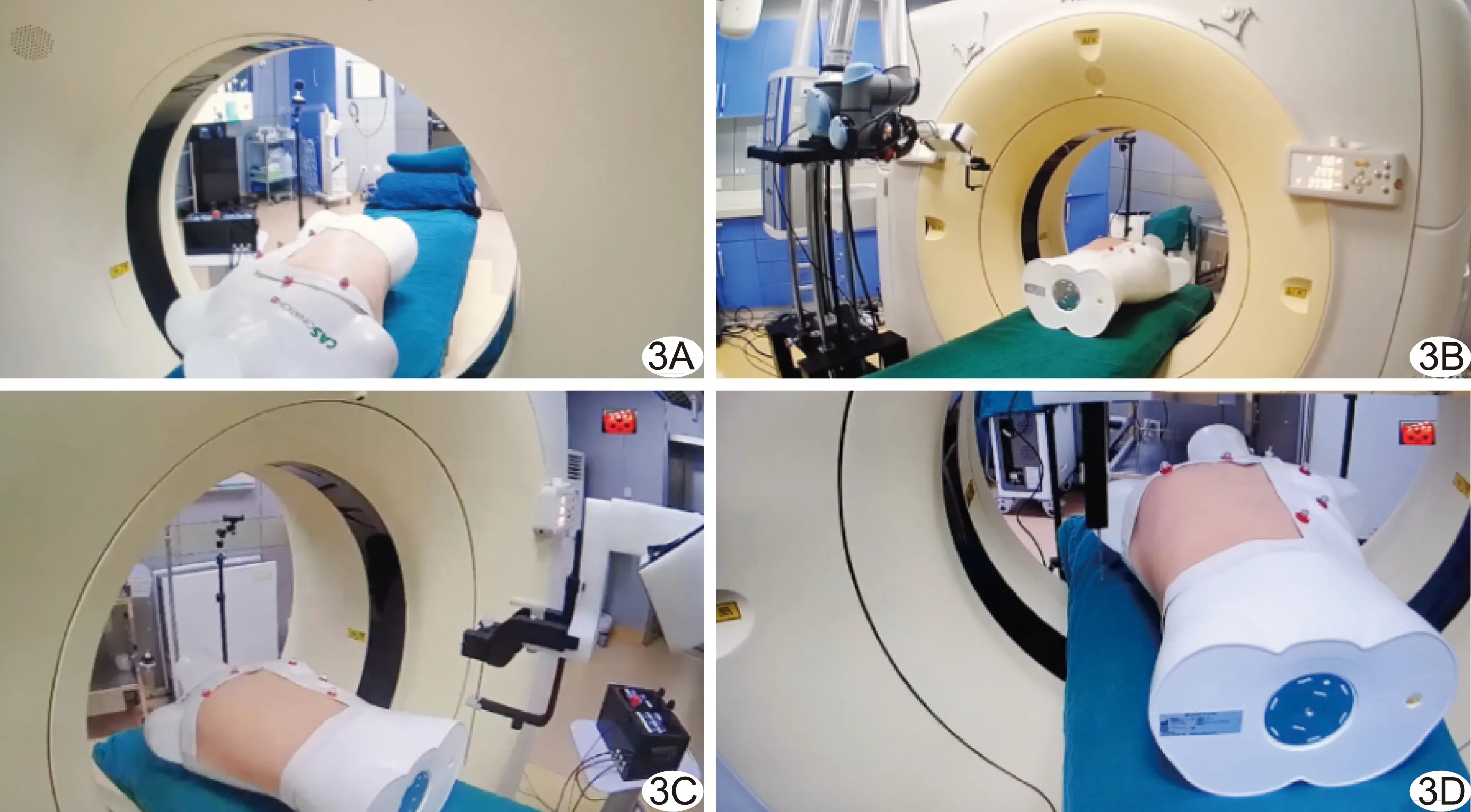
圖3 場(chǎng)景顯示器從不同方位顯示機(jī)械臂與CT機(jī)架的位置關(guān)系 A.頭側(cè)位; B.左足側(cè)位; C.右足側(cè)位; D.足正中位
1.2.2 分組及穿刺 將體模置于CT掃描孔徑內(nèi)行常規(guī)掃描,確認(rèn)并記錄待穿刺靶點(diǎn)位置。采用A、B、C三種引導(dǎo)方法,相應(yīng)行A、B、C 3組穿刺,穿刺靶點(diǎn)相同,每組各對(duì)同一體模的5個(gè)靶點(diǎn)(模擬肝臟病灶)進(jìn)行10次穿刺,共計(jì)完成30次穿刺。
A組由具有10年以上工作經(jīng)驗(yàn)的主治醫(yī)師在CT引導(dǎo)下進(jìn)行徒手穿刺,F(xiàn)OV 350 mm×350 mm,管電壓120 kV,管電流50 mAs,層厚5 mm;B組設(shè)定掃描參數(shù)為FOV 350 mm×350 mm,管電壓120 kV,管電流30 mAs,層厚5 mm;2組Z軸掃描范圍均為4 cm,定位靶點(diǎn)后,選擇適當(dāng)路徑進(jìn)行穿刺。C組為該醫(yī)師在CT透視遙控機(jī)器人引導(dǎo)下穿刺。將掃描床位置定位于靶點(diǎn)處,設(shè)置透視掃描參數(shù),F(xiàn)OV 350 mm×350 mm,管電壓120 kV,管電流30 mAs,準(zhǔn)直器寬度6 mm,選定有效輻射劑量為66%的透視模式后,將機(jī)械臂移動(dòng)至CT掃描層面,穿刺針固定于機(jī)器人持針器;在控制室進(jìn)行點(diǎn)踩踏板模式透視,調(diào)整穿刺針尖和靶點(diǎn)的位置關(guān)系,同時(shí)進(jìn)針,持續(xù)踩腳踏板進(jìn)行低劑量透視,以顯示穿刺針與穿刺靶點(diǎn)的空間位置關(guān)系,通過穿刺針尖低密度金屬偽影形成的“瞄準(zhǔn)線”來瞄準(zhǔn)靶點(diǎn),以操縱桿控制持針器穿刺(圖4、5);于透視模式下實(shí)時(shí)顯示穿刺針持續(xù)穩(wěn)定穿刺至靶點(diǎn)(圖6、7)。發(fā)現(xiàn)“瞄準(zhǔn)線”偏離靶點(diǎn)中央時(shí),采用調(diào)節(jié)操縱桿微調(diào)進(jìn)針方向。
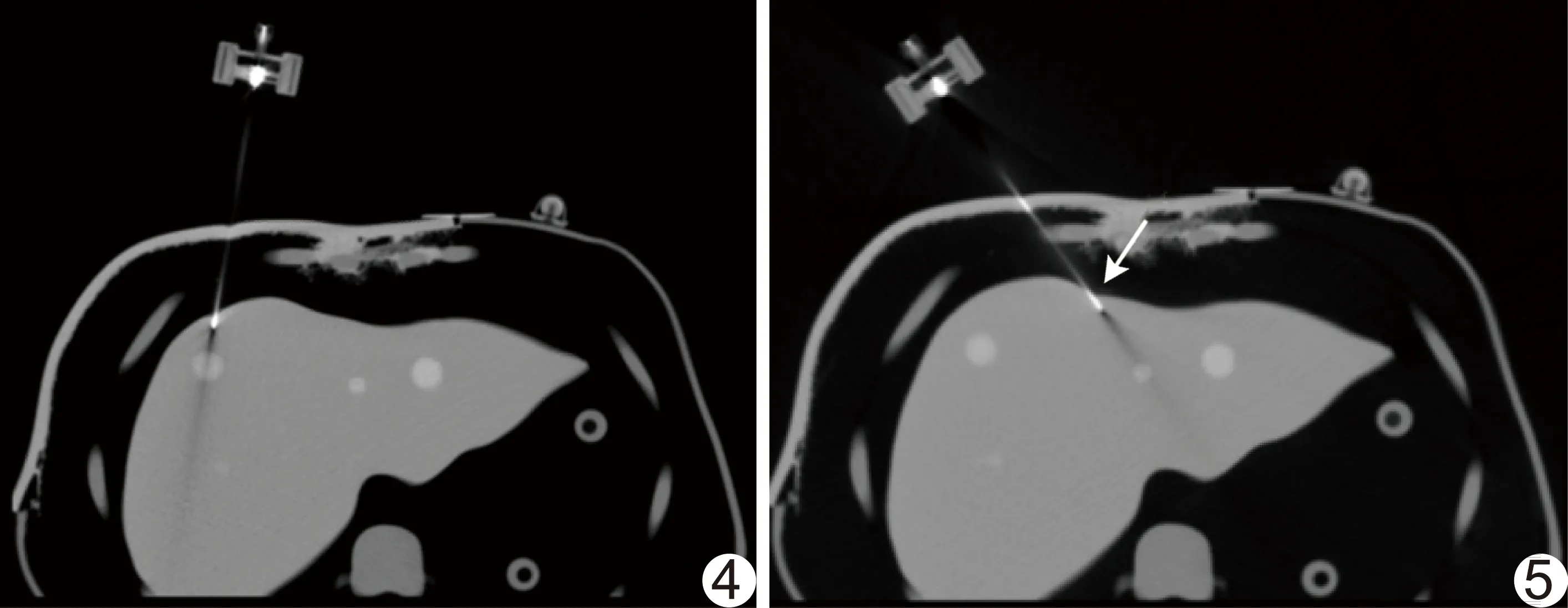
圖4 CT透視引導(dǎo)下穿刺模擬肝內(nèi)病灶(病灶直徑15 mm),穿刺針在接近病灶過程中始終沿直線進(jìn)針,無偏移 圖5 CT透視引導(dǎo)下穿刺位置較深的肝內(nèi)模擬病灶(直徑8 mm),沿模擬胸骨邊緣穿刺,因穿刺針在接近靶點(diǎn)過程中穿刺到不同密度組織而引發(fā)組織形變(箭),導(dǎo)致穿刺針方向發(fā)生偏移,瞄準(zhǔn)線偏離靶點(diǎn)正中
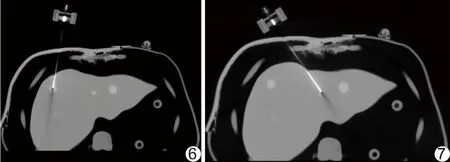
圖6 CT透視引導(dǎo)下穿刺針尖正中靶點(diǎn)中央 圖7 通過操控遙控操作桿緩慢調(diào)整穿刺針方向,最終穿刺針尖正中靶點(diǎn)中央
記錄每次穿刺靶點(diǎn)的調(diào)針次數(shù)、穿刺進(jìn)針時(shí)間(穿刺針尖刺入皮層至拔出穿刺針)、操作時(shí)間(準(zhǔn)備穿刺至拔出穿刺針)、輻射劑量,穿刺靶點(diǎn)準(zhǔn)確率和穿刺針尖與靶點(diǎn)中央的距離(即穿刺精確度)。采用劑量長度乘積(dose length product, DLP)計(jì)算輻射劑量。
1.3 統(tǒng)計(jì)學(xué)分析 采用SPSS 22.0統(tǒng)計(jì)分析軟件。以±s表示符合正態(tài)分布的計(jì)量資料,采用方差分析對(duì)3組進(jìn)行總體比較,以LSD-t檢驗(yàn)行兩兩比較。P<0.05為差異有統(tǒng)計(jì)學(xué)意義。
2 結(jié)果
3組共計(jì)完成30次穿刺,穿刺準(zhǔn)確率均為100%。A、B組操作時(shí)間、調(diào)針次數(shù)、穿刺時(shí)間及穿刺針尖與靶點(diǎn)中央的距離均大于C組(P均<0.05),A、B組間上述指標(biāo)差異均無統(tǒng)計(jì)學(xué)意義(P均>0.05);B、C組輻射劑量低于A組(P<0.05),B、C組間差異無統(tǒng)計(jì)學(xué)意義(P>0.05)。見表1。
表1 3種不同方法穿刺體模各指標(biāo)比較(±s)

表1 3種不同方法穿刺體模各指標(biāo)比較(±s)
組別操作時(shí)間(s)調(diào)針次數(shù)穿刺時(shí)間(s)輻射劑量(mGy)穿刺針尖至靶點(diǎn)中央的距離(mm)A組455.00±16.533.90±0.23333.50±15.3699.84±5.971.40±0.16B組454.00±16.963.90±0.23335.50±16.4060.06±3.59*1.40±0.12C組142.30±2.56*#1*#14.90±0.75*#61.84±2.82*0.10±0.07*#F值171.7377.24201.9326.7929.25P值<0.01<0.01<0.01<0.01<0.01
注:*:與A組比較,P<0.05;#:與B組比較,P<0.05
3 討論
傳統(tǒng)CT引導(dǎo)經(jīng)皮穿刺過程中,醫(yī)師借助CT掃描獲取靜止圖像,憑經(jīng)驗(yàn)估計(jì)穿刺角度進(jìn)行步進(jìn)式穿刺,根據(jù)病灶位置,一般需要進(jìn)行3~5次CT掃描以顯示穿刺針路徑,逐漸糾正穿刺針方向,直至成功穿刺靶點(diǎn)[6];穿刺過程中穿刺針和病灶均不可見,屬于盲穿。為提高穿刺精確性及可重復(fù)性,減少穿刺對(duì)醫(yī)師經(jīng)驗(yàn)的依賴,導(dǎo)航設(shè)備逐漸出現(xiàn)并不斷發(fā)展,可根據(jù)工作原理分為電磁、紅外線和計(jì)算機(jī)輔助定位系統(tǒng),其代表產(chǎn)品分別為Veran ig4、紅外導(dǎo)航儀(新博醫(yī)療技術(shù)有限公司)及Perfint Maxio[7-9]。以上導(dǎo)航設(shè)備均以術(shù)前CT圖像引導(dǎo)穿刺,難以糾正生理運(yùn)動(dòng)和組織形變所致病灶移位,更無法觀察穿刺針行進(jìn)引起的病理性改變?nèi)绯鲅蜌庑氐取?/p>
CT透視可實(shí)時(shí)觀察穿刺針進(jìn)針方向和穿刺引起的各種變化,顯著提高穿刺準(zhǔn)確性和安全性[10],但CT透視所致輻射劑量為臨床所關(guān)注。既往文獻(xiàn)[11]報(bào)道,常規(guī)劑量透視引導(dǎo)穿刺輻射劑量較高。為降低輻射劑量,應(yīng)盡量對(duì)掃描參數(shù)進(jìn)行優(yōu)化,以低于常規(guī)掃描的輻射劑量進(jìn)行透視下穿刺。本課題組自行研發(fā)的低劑量CT透視遙控穿刺機(jī)器人系統(tǒng)可通過遙控操作進(jìn)行穿刺進(jìn)針,實(shí)時(shí)顯示穿刺針進(jìn)針路徑及針尖與靶點(diǎn)的位置關(guān)系,及時(shí)調(diào)整穿刺針位置和方向;醫(yī)師在CT操作室觀察CT透視圖像,同時(shí)操縱機(jī)器人實(shí)現(xiàn)其預(yù)想動(dòng)作而完成操作。
本研究對(duì)比觀察常規(guī)CT引導(dǎo)徒手穿刺與CT透視遙控穿刺機(jī)器人系統(tǒng)對(duì)仿真模型中靶點(diǎn)的穿刺結(jié)果,發(fā)現(xiàn)機(jī)器人系統(tǒng)無需反復(fù)調(diào)針,僅通過一次安裝穿刺針并進(jìn)行遠(yuǎn)程遙控進(jìn)針即可準(zhǔn)確穿刺靶點(diǎn),在保證穿刺準(zhǔn)確性的基礎(chǔ)上大幅縮短了穿刺時(shí)間,減少了穿刺調(diào)整次數(shù),并提高了穿刺精確度。實(shí)際工作中,穿刺前已獲得高清晰度CT圖像,以CT透視引導(dǎo)穿刺時(shí),僅需關(guān)注針尖和靶點(diǎn)的位置關(guān)系及周圍組織形態(tài)改變,無須顯示細(xì)微組織結(jié)構(gòu),故可通過降低管電流,以降低輻射劑量。本研究3組穿刺準(zhǔn)確率均為100%,B、C組輻射劑量均低于A組,表明低劑量掃描可降低輻射劑量。
為降低輻射劑量,還可采用以下方法:①適當(dāng)調(diào)整探測(cè)器寬度,透視模式下,探測(cè)器寬度不同,則有效輻射劑量不同;6 mm探測(cè)器寬度的有效輻射劑量為66%,相對(duì)常規(guī)螺旋掃描范圍(5~10 cm)明顯減少;②采用“點(diǎn)踩-查看”模式,穿刺到體模表面前不持續(xù)踩腳踏板進(jìn)行曝光,而以“點(diǎn)踩-查看”模式獲得圖像,以校正穿刺針方向,而后采用持續(xù)曝光模式快速進(jìn)針。
遙控穿刺模型時(shí),同樣的穿刺進(jìn)針?biāo)俣柔槍?duì)不同組織器官可引發(fā)不同程度的組織形變而造成組織偏移,導(dǎo)致穿刺針“瞄準(zhǔn)線”偏離靶點(diǎn)正中,甚至針尖偏移超出透視層面。準(zhǔn)直器寬度6 mm較為適宜。另外,隨穿刺深度增加,針尖處的組織亦會(huì)發(fā)生壓縮、形變,導(dǎo)致靶點(diǎn)沿進(jìn)針方向推移。穿刺過程中采用較快的進(jìn)針?biāo)俣龋勾┐提樠杆俅┩附M織,可減少組織形變。如發(fā)生位置偏移,可通過操縱桿調(diào)整針尖方向。
低劑量CT透視遙控穿刺機(jī)器人系統(tǒng)固定在CT掃描床旁邊,穿刺過程中嚴(yán)禁移動(dòng)掃描床,否則將造成穿刺針與體膜之間發(fā)生相對(duì)運(yùn)動(dòng)甚至碰撞;如掃描層面發(fā)生移動(dòng),需要重新定位。
綜上,采用低劑量CT透視遙控穿刺機(jī)器人系統(tǒng)可增加穿刺精確度,減少調(diào)針次數(shù),縮短穿刺進(jìn)針時(shí)間和操作時(shí)間,且明顯降低輻射劑量。
猜你喜歡
全科護(hù)理(2022年10期)2022-12-26 21:19:15
中國合理用藥探索(2022年1期)2022-11-26 00:22:32
今日農(nóng)業(yè)(2022年4期)2022-11-16 19:42:02
鄉(xiāng)村科技(2021年33期)2021-03-16 02:26:54
國際放射醫(yī)學(xué)核醫(yī)學(xué)雜志(2021年10期)2021-02-28 08:41:58
藥學(xué)與臨床研究(2015年4期)2015-06-05 11:35:54
衛(wèi)生職業(yè)教育(2014年24期)2014-05-20 09:05:38
同位素(2014年2期)2014-04-16 04:57:20
中國合理用藥探索(2014年11期)2014-03-11 20:30:20