基于遺傳算法的集成型單片機控制信號處理系統優化
2021-11-24 10:18:12郭強
黑龍江工業學院學報(綜合版) 2021年9期
郭 強
(1.合肥工業大學,安徽 合肥 230009;2.安徽工業經濟職業技術學院,安徽 合肥 230051)
目前,單片機技術已在網絡通信領域、信息交互領域、工業集成化發展領域以及實時控制領域中得到了全面的應用與發展,并在數據獲取與終端數據管理方面,展現了技術的突出優勢。正因如此,此項技術引起了多個領域的關注。然而,集成型單片機處理數據信息的方式卻與常規的計算機數據處理方式存在差異[1]。例如,大部分集成型單片機可以提供終端為8位數的接口,提升了數據信息的高效率處理效果,但常規的計算機數據處理中無法快速實現數據的處理,影響了通信網絡的集成發展。 因此,本文引進遺傳算法,通過模擬生物進化過程,對集成型單片機控制信號數據信息進行多次迭代,并通過此種方式,尋找針對數據信息處理的最優解過程。提出的遺傳算法區別于常規算法,可以解決數據處理中一些較為復雜的組合數據處理問題。但是,仍未有相關研究成果將此種算法與集成型單片機的應用進行融合。因此,本文根據遺傳算法的優勢,設計一種針對集成型單片機控制信號的處理系統,以此實現對信號的自適應調控,優化系統處理功能,提升系統控制效率。
1 硬件設計
1.1 集成型單片機選型
為了確保本文系統在實際應用中具有較強的信號處理能力,選擇集成型單片機作為系統的主要構成硬件結構。在系統中,集成型單片機又被稱之為微控制器,其本質是一個功能型芯片,但并不是一個具有邏輯功能的芯片,而是一個可實現將計算機系統集成在芯片中的結構,功能可與微型計算機設備相當。
相比常規的終端系統,芯片中缺少信息直接輸入/輸出端口,具有集成運行效率高的顯著優勢[2]。在系統中,可作為信息編碼器、指令器、控制器、運算器,當信號通過結構總線互聯傳輸時,芯片中多個結構進行實時互聯,此時總線DB與總控CB之間建立某種連接,信息可以直接通過連接端口進行通信,這也是此結構不具備直接輸入/輸出端口便可以傳輸信息的原因。
早期單片機主要傳輸中具有4位信號,但在后期技術人員對其不斷優化中,單片機實現了對8位、16位信號的處理與傳輸,但小規模集成結構的單片機在市場內仍占據主流位置,這也在一定程度上代表了此硬件結構在市場內的主流發展方向。
選擇51型號單片機,該單片機屬于常規性單片機芯片中的一種,其結構如圖1所示。
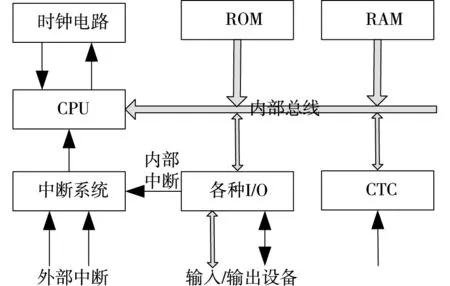
圖1 51型號集成單片機結構
在完成芯片結構描述后,對其結構中各模塊參數進行描述,如表1所示。
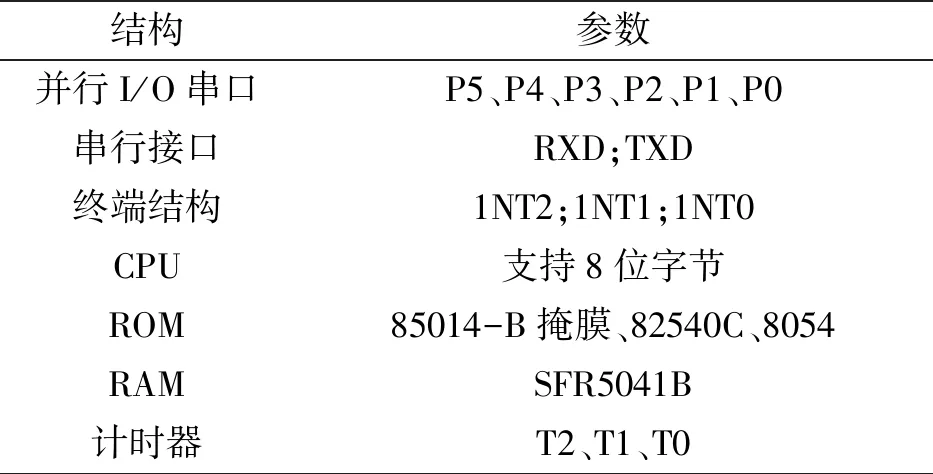
表1 51型號集成單片機結構參數
按照上述表1中內容,選擇適用于本文系統的單片機結構,以此完成系統硬件結構的設計與選型。
1.2 通信設備選型
為實現集成型單片機控制信號處理系統具有更優的處理功能,需要在系統硬件結構中配備通信設備。為此,在完成集成型單片機結構設計后,選用SDH498-560型號MSTP通信設備作為系統通信的核心硬件。該型號通信設備端口類型為622M/2G,PCM接口支持FXO/FXS/RS232/4WEM等連接,電源采用AC/DC。同時SDH498-560型號的通信設備具備良好的鏈路、環網等組網能力,能夠實現對SNCP網絡進行保護,確保本文系統在運行過程中,各類數據信息能夠在更加安全的通信信道中傳輸。
除此之外,該型號通信設備與其他相同功能通信設備相比,還具備寬窄帶一體化接入和傳輸特點,能夠與PT-60 5650設備板卡通用。因此,能夠進一步減少備件,方便集成型單片機控制信號處理系統在運行后期的良好維護[3]。本文系統主要用于對集成型單片機控制信號的處理,系統應當部署在組網環境當中,所有本文上述選擇的Web服務器、數據庫服務器以及通信設備都應當在該網段中連接。為了防止外界環境對本文系統運行造成影響,應當將本文系統的內網環境與互聯網區域進行嚴格的物理隔離。
2 軟件設計
2.1 信號處理工作單元與標志位
在完成系統硬件結構的設計后,需要完善單片機控制信號處理過程,以此種方式實現對系統運行的優化。
為了確保與此相關功能在系統內的落實,采用建立信號處理工作單元與標志位的方式,為系統處理信號提供一個適宜區域[4]。在此過程中,應明確系統的軟件中包括主程序、中斷程序與處理程序,三個核心程序之間的相互銜接與作用,構成系統完整的功能。
因此,在建立處理單元時,可設定一個控制信號接收緩沖單元,將其定義為BUF0,每個在前端調試的信號在此區域內均可進行二進制位信號的適當調試,并在調試過程中通過累加處理器,連通進位區域進行左移操作,確保控制信號可以準確地傳輸到BUF1空間內。
當BUF1接收到緩沖單元信息時,指令編碼將暫存單元信息,并獲取第一次指令的控制碼。此時,區域內的leng控制區域將進行指令字節的計算,自動求解二進制位數的實際數值[5]。在此基礎上,GRP數據處理器將自動調整初始指針,并清理計數器,設定一個長度為16.0字節的GATE位,定義GATE位=1.0,則T2、T1、T0可沿著控制信號傳輸的方式觸發處理空間,當SOT位置表現為隔離位時,收到前端處理指令的標志位將被占用,用于進行信號處理工作,以此完成對信號處理工作單元與標志位的建立。
2.2 基于遺傳算法的單片機控制信號適應度優化
在完成信號處理工作單元的構建后,考慮到在此處理單元內的控制信號數據類型較為復雜,傳統的處理方式顯然已不再適用,而要滿足此種數據處理需求,應在處理控制信號前,分析信號的適應度。因此,引進遺傳算法,對單片機控制信號適應度進行計算,在計算過程中,模仿生物種群的優勝劣汰處理過程,獲取其中適應度較高的控制信號[6]。在計算時,選擇算法中的懲罰機制,對處理空間中適應度較低的染色體進行個體懲罰操作,確保適應度較低的數據個體指數遠少于適應度高的數據個體。在此過程中,定義前者為個體I,則I屬于目標函數,對目標函數進行描述,如公式(1)所示。
(1)
(2)

在完成對目標函數適應度的描述后,將表達式與集成型單片機控制信號處理進行適配,此時需要調整目標函數的表達式,具體表達式如式(3)所示。
(3)
公式(3)中:wc表示為針對集成型單片機控制信號的懲罰因子,對wt的描述如式(4)所示。
(4)
公式(4)中:C1表示為適應度個體I的持續運算時長;Cmax表示為適應度個體I的持續運算時長,由于上述計算公式在實際應用中,均涉及最小化數值轉換的問題,因此,需要在計算適應度時,進行函數的轉換,計算公式如式(5)、式(6)所示。
(5)
(6)
公式中:fc(I)表示為對適應度函數的轉換表達;ft(I)表示為對適應度周期計算的轉換表達。
在完成上述相關計算后,定義此過程中發生轉化行為的遺傳染色體個數為POP,此時可根據適應度趨勢,對控制信號進行序列排序,而在此過程中其余個體將在個體庫中被刪除。因此,可使用等比例選擇計算法,對不同控制信號在處理過程中的存活率進行計算,掌握控制信號在區間內的適應度,并以此種方式決定下一代數據個體的最優存活值。在使用遺傳算法進行數據信息的每一次迭代過程中,需要刪除其中適應度較低個體,直到POP數據集群中個體具備主動離開能力,輸出在此過程中的最優解,以此作為計算單片機控制信號適應度的依據[7]。計算過程如式(7)、式(8)所示。
(7)
(8)
公式(7)、(8)中:Pc(I)表示為對目標函數I適應度的最優計算解;Pt(I)表示為對目標函數I最佳迭代次數的最優計算解。輸出最優解中的控制信號集合,完成對單片機控制信號適應度的計算。
2.3 校正并處理變異算子
在完成對其適應度的計算后,考慮到輸出的信號集合中存在交叉算子,而交叉算子在反復迭代中可能發生變異,因此,在處理集成型單片機控制信號的最優階段,需要對變異算子進行校正與處理。根據計算需求,可將交叉算子的變異行為近似看作一種染色體優先級置換過程,其中位于置換結果優先序列中的算子,可認為其是優秀染色體的代表[8]。反之,列于后列算子屬于次代染色體基因。在處理過程中,可通過迭代交叉的方式進行變異行為的獲取,并考慮編碼中不同列表中算子的排序,采用隨機選擇一個位置值的方式,對其初始化值進行判斷。假定在此過程中,算子的初始化數值表示為1.0,則需要將其數值1.0轉化為數值0。反之,若初始化算計的實際值為0,則需要將其從0轉變為1.0。
為避免調整算子序列過程中出現列表重復的現象,可結合自帶染色體的結構,按照下述步驟對變異算子進行校正:定義一個[1,n]的序列范圍,n為隨機數值,交換兩個數值的基因排序,判定計算過程是否仍滿足需求,倘若滿足常規計算過程,可認為實現對變異算子的校正與處理,反之認為未完成對算子的有效處理。綜合上述分析,完成對集成型單片機控制信號的處理,實現對系統軟件功能的規劃。
3 實驗分析
3.1 實驗背景
本文系統從硬件與軟件兩個方面,對集成型單片機控制信號處理系統進行了設計與研究,實現了對傳統系統結構與功能的優化。因此,實驗中采用基于PLC的控制信號處理系統,將其與本文設計的系統進行對比,在實際測試過程中,本文選擇的檢測方式為黑盒檢測,此種測試方式更加適用于對系統運行功能的評估。通常情況下,在系統程序的接口進行功能與操作測試,包括對輸入信息與信號的接收與有效導出、系統是否能根據操作指令執行正確的操作行為、輸出的數據是否具有時效性與完整性等。
3.2 實驗準備
在實驗過程中,需要為系統的應用布設一個運行空間。因此,選擇將設計的系統與參與實驗的系統,應用到IONLANG11000實驗室智能機器人中,本次選擇的智能機器人為上海海軍大學實驗室研發,使用系統對機器人行為反饋信號進行處理,可以有效地控制機器人操作行為。在此過程中,定義機器人定向回路信號處理結構,并以此作為實驗操作的核心,機器人定向回路信號處理結構如圖2 所示。
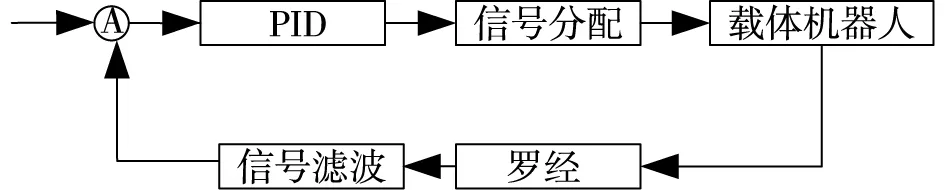
圖2 機器人定向回路信號處理結構
圖2中A表示為系統前端發出的控制信號,在完成對實驗中相關參與對象的部署后,使用通信設備與智能機器人接口進行連接,獲取在機器人執行常規行為時控制信號中的白噪聲,在此基礎上,使用卡曼爾濾波器對信號進行濾波處理,并將處理后的白噪聲傳輸到終端傳感器上,濾波后的信號狀態曲線如圖3所示。
圖3 濾波后信號狀態曲線
在完成實驗數據獲取后,由前端發出控制指令,并在此基礎上,分別使用本文系統與參與實驗的系統,對發出的指令信號進行處理,使用卡曼爾濾波器對發出信號進行濾波獲取,不斷提取處理波段濾波的均誤差,并以此作為評估系統優化設計結果的依據。實驗結果中,濾波的均誤差越低,證明對控制信號的處理效果越佳,反之越差。
3.3 實驗結果分析
按照上述提出的實驗流程,執行此次對比實驗,獲取實驗結果信號處理的誤差,將其繪制成曲線圖,結果如圖4所示。

圖4 對比實驗結果
由圖4可知,實驗結果受到初始化數值的影響,在前期階段,濾波的控制誤差均為0.15%,但隨著信號迭代處理次數的不斷改變,兩種系統的控制誤差發生了改變,優化后的系統信號控制誤差低于基于PLC的集成型單片機控制信號處理系統的誤差。盡管在經過系統對控制信號的處理后,兩個系統獲取的濾波信號均處于一種相對穩定狀態,但傳統系統處理結果顯著較差。相比傳統的處理系統,本文主要把遺傳算法與集成型單片機控制信號的處理系統進行有效融合后,設計的系統可實現對濾波均方差的有效控制,證明系統可以實現對控制信號的有效處理。
結語
單片機技術的發展在一定程度上推進了我國計算機產業的進步與更新,相關單機片的應用也從獨立方向逐步向集成方向過渡,使用集成型單機片構成計算機網絡,已成為此種技術的應用方向之一。本文基于遺傳算法的優勢,設計一種針對集成型單片機控制信號的處理系統,并通過設計對比實驗方式,可以有效證明本文通過遺傳算法與集成型單片機控制信號的處理系統融合設計后,新的系統可實現集成型單片機控制信號的濾波均方差的有效控制。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55