基于改進差分進化的多無人機協同航跡欺騙算法研究
2021-11-30 02:28:20丁柏圓鄭凱元劉承禹李云鵬孫衛民游世勛
航天電子對抗 2021年5期
關鍵詞:策略
丁柏圓,鄭凱元,劉承禹,李云鵬,孫 健,孫衛民,游世勛
(1.中國人民解放軍96901部隊,北京100094;2.中國航天科工集團8511研究所,江蘇 南京210007)
0 引言
隨著電子對抗裝備與技術的不斷提升與發展,海上作戰的信息化程度也隨之不斷提高,其艦載雷達的智能化水平也得到了充足的發展[1]。航跡欺騙是一種十分有效的對抗艦載組網雷達的干擾技術[2]。它根據脈沖體制雷達的測距原理,通過控制假目標相對于雷達脈沖到干擾機的時延,產生指定位置上的假目標,隨著干擾平臺運動,累積的假目標點形成假目標航跡。文獻[3]提出一種電子戰無人機路徑規劃方法,建立了無人機干擾預警雷達模型,根據無人機和突防飛機相對預警雷達的角速度及其他約束條件求解出單架無人機最優路徑。文獻[4]從雷達干擾能量域角度出發,分析對雷達的干擾效果影響因素和無人機執行支援干擾任務時的部署要求,得出了無人機的兵力分配方法。文獻[5]全面考慮環境威脅約束、機動性能約束和假目標干擾任務約束,利用綜合輪盤法、最優保存策略和6種進化算子形成進化算法,對航路規劃問題求解。但是以上方法均未考慮多無人機對雷達組網的欺騙效果以及無人機數量對航跡欺騙干擾策略的影響,使得無法利用有效數量的多無人機對組網雷達實施航跡欺騙。
本文圍繞無人機數量對虛假航跡逼近度的問題,分析無人機協同運動約束,進行多無人機協同航跡欺騙問題建模,利用改進差分進化算法進行分層優化,為無人機智能協同干擾提供理論與實踐參考。
1 多無人機協同航跡欺騙問題
無人機對雷達進行航跡欺騙干擾是考慮多架無人機對組網雷達系統的協同干擾問題,雷達將檢測到的回波信號經過處理后形成航跡點狀態信息(主要關心目標的空間位置信息)傳輸到融合中心,融合中心對5部雷達獲取的目標狀態信息進行“同源檢驗”,只要有3部以上雷達的航跡點狀態信息通過了同源檢驗[6],即至少有3部雷達同一時刻解算出的目標空間位置是相同的,融合中心就將其確定為一個合理的航跡點,20個連續的經融合中心確認的航跡點形成的合理航跡,將被組網雷達系統視為一條真實的目標航跡。
本文預設一條虛假目標航跡數據,該虛假航跡數據包含20個時刻的虛假目標位置坐標信息,時間間隔為10 s。為實現較好的干擾效果,現限定每架無人機在該空域均做勻速直線運動,航向、航速和飛行高度可在允許范圍內根據需要確定。討論不同數量的無人機實現虛假目標航跡,具體分析每一架無人機的運動規律和相應的協同策略。
2 多無人機協同航跡欺騙模型
2.1 數學模型
在實現航跡欺騙的干擾方案中,假設無人機的數量為M,其中某一部無人機用m(m=1,2,…,M)表示;假設雷達的數量為N(N=5),其中某一部雷達用n(n=1,2,…,N)表示,令無人機對雷達產生干擾的策略對為policy(m→n),因此,在任意采樣時刻t,多無人機產生的干擾分配策略為S,S是一個由{0,1}組成的M×N的矩陣。
生成每個虛假航跡點均需要3部雷達同時通過“同源檢測”,即至少需要3部無人機對相應雷達成功進行了干擾。3部雷達被成功干擾時各無人機的空間分布圖如圖1所示。

圖1 無人機與雷達空間分布
從圖1中可以看出,虛假航跡上的每個點處均有至少3條雷達-無人機延長線相交。以無人機1為例,假設在生成第一個虛假目標位置點時無人機1對雷達1進行了干擾,則可以確定無人機1的初始位置位于雷達1與第一個虛假目標位置點的連線上,且高度處于某一范圍之間。一旦給定無人機的初始位置和速度,便能確定整個運動軌跡。在某個時間點,將無人機的運動軌跡點與各個雷達分別連接并延長,求取相應虛假航跡點到各條延長線的距離D m,n,(m=1,2,…,M;n=1,2,…,N),如圖2所示。其中D m,n越小,則表明該時刻無人機具備產生要求的欺騙點的潛力越大,若在t時刻,要求的欺騙航跡點為P t,則對無人機m而言,生成最相似的航跡點的干擾策略為:

圖2 生成航跡示意圖

且當該距離D m,n(P t)為0時,即表明無人機m與雷達n的連線剛好穿過該虛假航跡點。
由分析可知,在生成虛假航跡過程中包含了2種不確定性:
1)每個時刻無人機對雷達進行選擇性干擾的不確定性,即策略的隨機性。因為在每個采樣間隔內,針對每部雷達,所有位于其作用范圍以內的無人機均可以選擇對它進行假目標干擾,所以極大增加了干擾策略組合的復雜性。
2)各個無人機初始狀態信息(包括位置和速度)的不確定性。各無人機均在相應空域中做勻速直線運動,但是每部無人機的速度大小/方向和起始位置都是隨機的,所以初始狀態的不確定性便包含了無人機航跡的不確定性。
2.2 約束條件及目標函數
為了盡可能準確地擬合出給定的虛假航跡,需要進行2個層面的尋優。
第一層尋優的目的是要在每個采樣時刻為無人機組確定最佳干擾策略。基本思路為取出與任意3個無人機相對應的Dmin并使其和為最小。假設t時刻,目標航跡點P t和所有可能的D m,n產生的距離矩陣為D,則目標函數f i t為:

實現最優干擾策略所受的約束為:必須至少有3部雷達同一時刻解算出的目標空間位置相同時,融合中心才將其確定為一個合理的航跡點。所以目標函數中的3部雷達必須各不相同才能滿足生產航跡點的條件,且同一時刻1架無人機只能干擾1部雷達,即:

第二層尋優的目的是為每架無人機指定最優的航行路線。如前文所述,由于所有無人機均在相應空域中做勻速直線運動,所以只需要確定各架無人機的初始位置和初始速度信息便可確定其整個航行路線。本層尋優的基本思路是不斷調整各架無人機的初始運動參數,使得所有時刻最優策略下的目標函數f i t(S t)之和達到最小。則最終的目標函數F I T為:

式中,T為總動作規劃的時長,為20個采樣周期。
實現動作規劃所受的約束為:為了更準確地生成給定航跡,在選取無人機初始位置時,應滿足無人機位于第一個虛假航跡點和目標雷達的連線或延長線上。假設無人機m在初始時刻選擇對雷達n進行干擾,則該無人機的初始位置點和雷達n位置點以及第一個虛假航跡點滿足直線方程:

式中,無人機初始位置坐標為(x m,1,y m,1,z m,1),雷達n位置坐標為(x n,y n,z n),第一個虛假航跡點位置坐標為(P1,x,P1,y,P1,z),且單位都為km。并且,無人機飛行速度需滿足:

式中,Vmin表示無人機最小飛行速度,Vmax表示無人機最大飛行速度。無人機飛行高度需要滿足:

式中,zmin,t表示無人機最小飛行高度,zmax,t表示無人機最大飛行速度。生成虛假航跡的無人機必須位于其干擾的雷達n探測范圍之內,即二者之間的距離必須小于雷達最大探測距離Rmax:

3 基于改進差分進化算法的多無人機協同航跡欺騙算法
分析上文所建模型可知,該問題中變量結構較為復雜,既包含連續變量(無人機運動參數)又包含離散變量(各個時刻無人機的干擾策略),考慮差分進化(DE)算法的全局搜索能力較強,需設置的超參數數目較少且可操作性強等優點[7],選擇該算法對問題進行求解。
3.1 差分進化算法
DE是一種高效啟發式進化算法,采用浮點實數矢量編碼的方式在連續空間域內對問題的解進行捜索并優化。該算法采用全局性的捜索策略,通過分別基于差分形式和概率選擇的變異操作和交叉操作來引導種群的進化過程。整體的算法流程可以簡要概括為種群初始化、變異操作、交叉操作和選擇操作4個方面。
3.2 改進的混合差分進化算法
1)種群初始化
DE作為一種基于群智能的優化算法,其特點為每個種群中都有多個個體,且每個個體向量都代表了問題搜索空間的一個可行解。在對種群進行初始化時,為了使其能夠盡量覆蓋整個搜索空間,不妨在參數限定的有限空間內對個體進行均勻的隨機化。本文無人機航跡欺騙干擾需要對其干擾策略進行求解,因此構建解空間編碼方案。
第一層優化:對于目標函數f i t,尋優的對象是干擾分配策略,即單純的對策略矩陣S進行求解即可。
第二層優化:由目標函數F I T的形式可知,原始的差分進化算法是無法直接使用的,需要對干擾策略和運動方式進行編碼,編碼方案如下:
①在滿足式(10)中約束的條件下隨機生成初始的干擾策略;
②隨機生成一個比例系數,且使每部無人機的高度滿足約束;
③隨機生成初始速度,且使每部無人機的速度滿足約束;
④隨機生成初始速度向量,且使每部無人機最終的位置滿足約束。
由此生成的編碼方案可用一個M×6的矩陣如圖3所示。
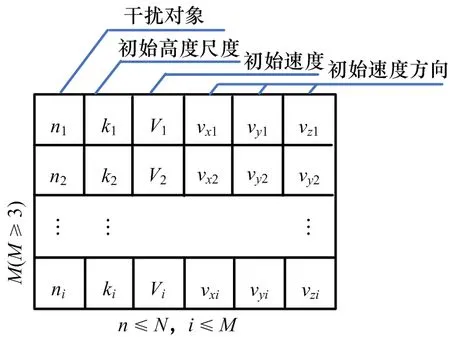
圖3 編碼方案
2)變異操作以及修正
第一層優化:由于編碼空間是離散的,為了增強DE算法搜索能力,采用的變異策略為:

式中,尺度因子F為1。如果變異后的個體在數值上小于1或者大于N,分別采用加N和減N的方式,使其依然在邊界內。如果修復后<3則重新生成一組符合約束的策略。
第二層優化:此時的編碼方案是離散空間以及連續空間的混合,依然采用式(11)的策略,此時令F=0.6。
在編碼矩陣的第1列,如果變異后的個體在數值上超出邊界(1,N),采用第一層優化的方法進行修正;在矩陣的第2列,對超出邊界(0,1)的數值進行裁剪;在矩陣的第3列,對超出邊界(Vmin,Vmax)的數值進行裁剪;對矩陣的第4~6列,需要先檢驗當前行所代表的無人機,以z方向的分量vz進行運動時是否會超出邊界:

式中,τ是單位采樣時長,為10 s;h是當前無人機的高度。然后對超出邊界的vz進行裁剪,最后因為速度向量的模必須為1,最后利用同時進行比例修正。
3)交叉操作
第一層優化:對于矩陣S,由于每一行的結構是固定的,希望交叉時不破壞每一行的結構,故采用以下方式:
隨機選取2個個體,再隨機生成一個行號mr,然后判斷將個體2的該行與個體1的該行進行交換后,個體1是否仍滿足式(4)的約束,若滿足,則交叉操作執行,否則不執行。
第二層優化:和第一層的交叉方法一致。
4)選擇操作
為保證在種群迭代時當前群體的規模不發生變化,DE算法采用貪婪選擇機制對目標向量與試驗向量進行選擇。挑選其中適應度比較好的向量進入下一代種群。最終得到的基于改進差分進化算法的多無人機協同航跡欺騙算法流程圖如圖4所示。

圖4 基于改進差分進化算法的多無人機協同航跡欺騙算法流程圖
4 仿真分析
本文對無人機架數M=3,4,5,6時的運算結果進行對比分析,且對于第一層優化,設置種群數量為20,最大演化代數為1 500;對于第二層優化,種群數量為100,最大演化代數為1 500。算法生成航跡與給定航跡之間的平均誤差與最小誤差隨進化代數的增長而下降,相應的誤差收斂曲線如圖5所示。
從圖5中可以看出,當無人機數量確定時,隨著算法迭代次數的增加,目標函數的適應度值不斷下降,為了進一步提高算法的計算效率,算法規定,當平均誤差與最小誤差之差小于等于1×10-10或進化代數達到設定的上限時,算法終止進化過程。可以看出,隨著無人機數量的增加,算法按照規定收斂的迭代次數也隨之增加。這是因為隨著無人機的數量的增多,目標函數中解空間的維度也進一步擴大,導致計算復雜度增大,又由于DE算法中的種群數量是有限的,因此在進行迭代尋優時,對于數目較多的無人機,需要更多的迭代次數才能滿足收斂要求。

圖5 M=3,4,5,6時生成的算法收斂特性
生成最終虛假航跡各架無人機采用的干擾策略,即各個時刻無人機組選擇進行干擾的雷達編號如表1—4所示。其中加粗的數字編號代表在當前時刻貢獻為虛假航跡的干擾策略。

表1 M=3無人機干擾策略
當采用不同架數的無人機進行干擾時,生成虛假航跡的精度不同。在M=3,4,5,6時對應的均方誤差RMSE如表5所示。

表5 均方誤差
從以上的分析內容可知,在本模型中,當無人機數量小于5部時,采用的干擾策略無法實現協同工作,因此生成的虛假航跡幾乎沒有變化。而當無人機數量大于5時,生成航跡和目標航跡之間的誤差開始大幅度減小,且對應的干擾策略也充分體現了多無人機協同作戰。故可以認為,在給定閾值內,用勻速機動實現目標航跡是可行的。求得的各架無人機最優初始狀態如表6所示。
從表6中可以看出無人機1的初始狀態干擾對象為雷達2,無人機2的初始狀態干擾對象為雷達3,無人機3的初始狀態干擾對象為雷達3,無人機4的初始狀態干擾對象為雷達1,無人機5的初始狀態干擾對象為雷達4。最終得到M=5時生成的虛假航跡與目標航跡空間分布圖如圖6所示。

表2 M=4無人機干擾策略

表3 M=5無人機干擾策略

表4 M=6無人機干擾策略

表6 M=5無人機的最優初始狀態

圖6 M=5時生成的虛假航跡與目標航跡空間分布圖
5 結束語
本文提出了一種基于改進差分進化的多無人機協同航跡欺騙算法,該算法通過建立多無人機航跡欺騙模型,分析運動約束,進行多無人機協同航跡欺騙問題建模,并給出無人機航跡欺騙干擾策略和運動方式的編碼描述方法,利用改進差分進化算法對其進行尋優,實現對艦船編隊組網雷達的有效航跡欺騙,從而提高對抗裝備的智能化水平。
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:42
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:10
數學大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛生(2016年8期)2016-11-12 13:26:50