基于小波變換與RBF神經網絡的GNSS水汽值預測研究
2021-12-01 00:30:52劉備任棟
大地測量與地球動力學 2021年12期
劉 備 任 棟
1 海軍工程大學導航工程教研室,武漢市解放大道717號, 430033 2 廣西空間信息與測繪重點實驗室,桂林市雁山街319號, 541006 3 中國科學院精密測量科學與技術創新研究院大地測量與地球動力學國家重點實驗室,武漢市徐東大街340號,430077 4 中國科學院大學,北京市玉泉路19號甲,100049
水汽的實時分布以及預測在監測中小尺度災害性天氣方面具有重要意義[1]。但常規的水汽獲取手段具有局限性,例如無線電探測法雖然精度高,但時間分辨率較低[2]。利用GNSS技術反演水汽的精度可以滿足降水預報要求,且成本低、時空分辨率高[3]。
小波變換方法能夠降低水汽中各種干擾對預測結果的影響,而RBF神經網絡在時間序列預測中的應用效果優于其他神經網絡模型[4]。本文利用小波變化與RBF神經網絡相結合的方法開展河北省GNSS水汽值預測研究。
1 數據與方法
1.1 站點分布
選取河北省24個CORS站的數據進行分析,站點分布如圖1所示。
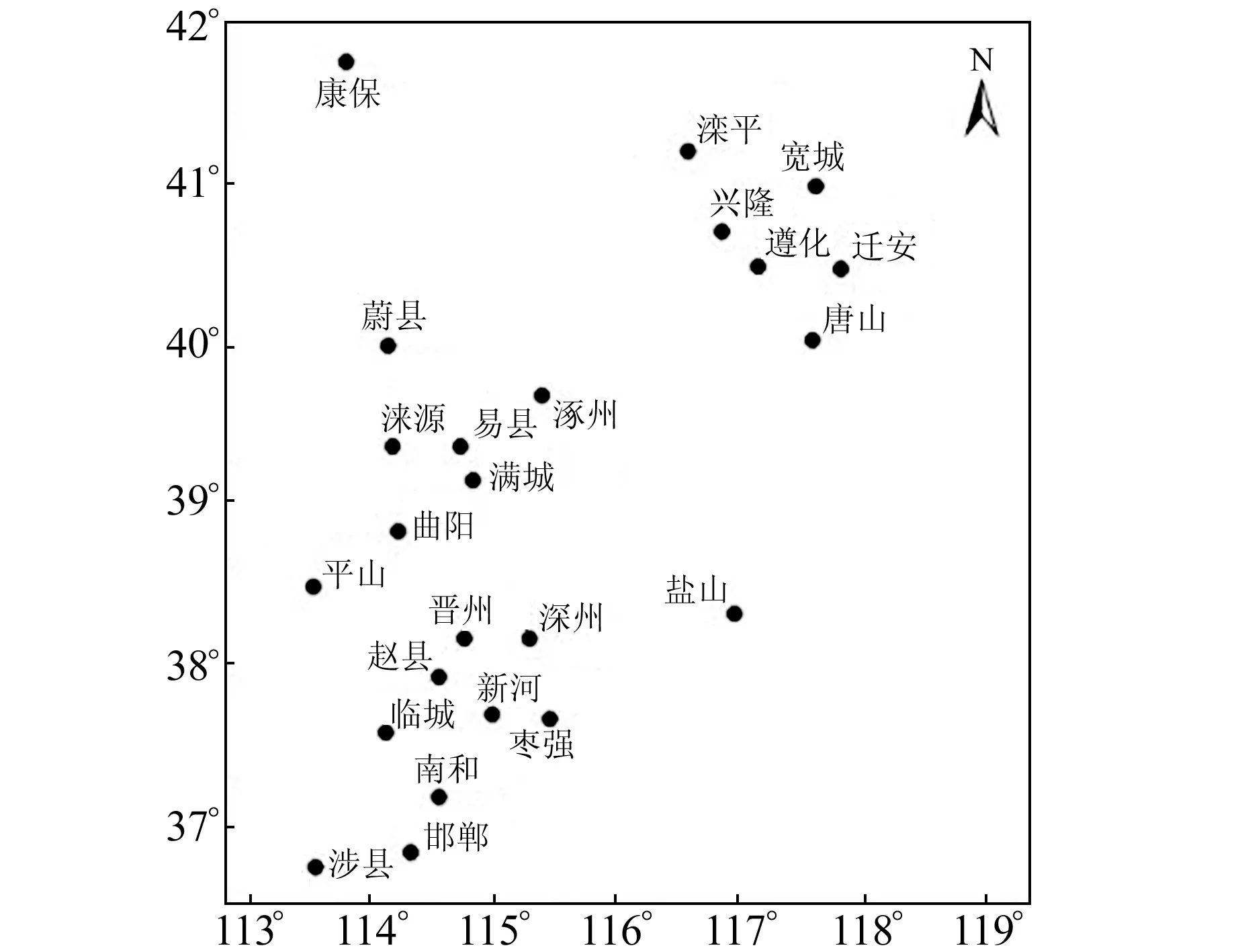
圖1 站點分布Fig.1 Distribution of the stations
1.2 小波變換理論
小波變換是針對傅里葉變換的不足而發展起來的,其具有多分辨率的特性,常用的小波函數有Haar小波、Daubechies小波、Symlets小波、Meyer小波和Mexican-hat小波等。小波變換時需根據信號特征來選擇小波基,考慮到GNSS水汽值變化的特征,本文最終選擇dbN小波系[5]。
1.3 RBF神經網絡
RBF神經網絡是一種3層前向網絡:第1層是輸入層,為信號源節點;第2層是隱含層,隱單元的變換函數為局部分析的非線性函數,隱單元數根據所描述問題的需要來確定;第3層是輸出層,輸出的是隱單元的線性加權[6]。
1.4 GNSS水汽值計算
本文研究的GNSS水汽值時間跨度為2014-06-16~30,由河北省GNSS CORS觀測數據反演獲得。解算方案如下:解算軟件為GAMIT 10.4,星歷為IGS精密星歷,解算方式為Relax模式,衛星截止高度角10°,引入同期國內IGS站點WUHN、LHAZ、URUM、SHAO等數據聯合解算,站點天頂對流層延遲的解算為每小時估算1個值,結合站點氣象觀測數據可以獲得24個GNSS站點時值水汽值,單位為mm。
2 基于小波變換與RBF神經網絡的GNSS水汽值預測
基于小波變換與RBF神經網絡的GNSS水汽值預測的過程如下:
1)用db5小波基對各GNSS站點的水汽序列進行小波分解,分解層數為8層,分解后得到高頻項與低頻項。預測樣本數據為2014-06-16~30的GNSS-PWV時值數據,共360個。
2)使用RBF神經網絡進行預測實驗時,按輸入數據的不同分為3種預測類型:未進行小波變換的原始數據的預測、小波變換后的低頻項的預測以及高低頻系數重構后的預測。由于水汽存在半日周期及日周期的變化[7-8],同時考慮到訓練樣本的需求及數據長度,選擇3 d共計72個點作為輸入,輸出則為12個神經元,樣本點為360個,形成277組樣本,前180組為訓練樣本,181~260組為內符合精度檢驗樣本,261~277組為外符合精度檢驗樣本。預測過程中,對于不同的原始數據設置不同的spread參數,以達到最佳的預測效果。
3)對預測后的小波高頻系數和低頻系數進行重構,得到GNSS水汽值預測序列。
3 預測結果分析
為了檢驗本文方法用于GNSS-PWV預測的可靠性,計算277組樣本后10組數據RBF神經網絡預測值、本文方法預測值與GNSS水汽實測值的均方根誤差和絕對值誤差,結果見表1。
由表1可以看出,直接采用RBF神經網絡進行預測的PWV的精度低于經過小波變換后再預測的PWV的精度,并且不同站點之間的精度相差較大。
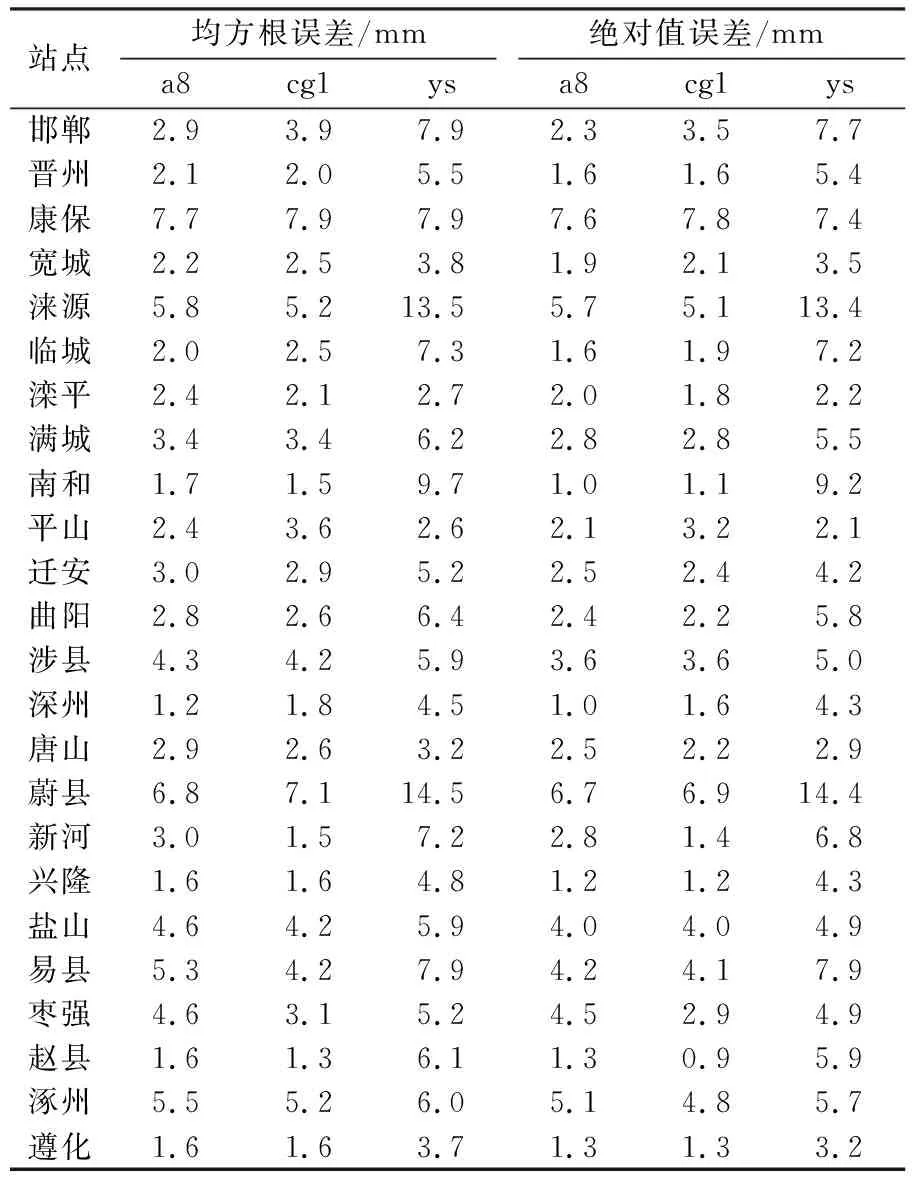
表1 RBF神經網絡預測值、小波變換結合RBF神經網絡預測值與GNSS水汽實測值的均方根誤差、絕對值誤差統計
圖2為深州站和蔚縣站RBF神經網絡預測的GNSS水汽值、小波變換結合RBF神經網絡預測的GNSS水汽值與GNSS水汽實測值的比較,圖中,a8預測和a8&d8預測分別為小波變換后的低頻預測值和高低頻系數重構后的預測值。
從圖2可以看出,直接采用RBF神經網絡預測的GNSS水汽值變化趨勢和GNSS水汽實測值較為一致,但數值相差較大;小波變換與RBF神經網絡結合預測的GNSS水汽值較為接近實測水汽值,但預測結果的精度隨著預測時長的增加而降低。
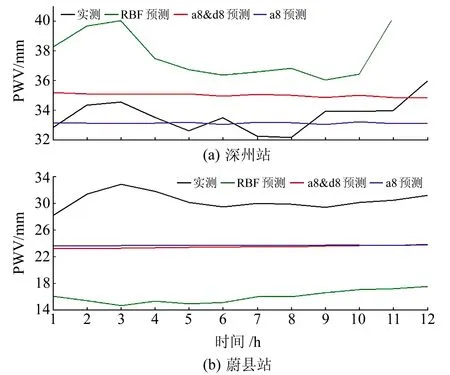
圖2 RBF神經網絡預測值、小波變換結合RBF神經網絡預測值與GNSS水汽實測值Fig.2 The comparison among the prediction values ofGNSS-PWV with RBF neural network, wavelet transform and RBF neural network and measured GNSS-PWV values
4 結 語
本文以河北省為研究區域,利用小波變換與RBF神經網絡相結合的方法開展GNSS水汽值的預測研究。實驗表明,本文方法預測的GNSS水汽值比單一RBF神經網絡預測的GNSS水汽值更接近實測GNSS水汽值,但本文方法預測結果的精度隨著預測時長的增加而降低。