一種小型船舶自動掃艙機控制系統概述
2021-12-09 07:18:02張青岱丘銳聰吳佳勁楊澤濤鄒易余楊勇森袁建斌廣東海洋大學
珠江水運 2021年20期
關鍵詞:作業
張青岱 丘銳聰 吳佳勁 楊澤濤 鄒易余 楊勇森 袁建斌 廣東海洋大學
通訊作者:袁建斌
1.前言
根據波羅的海航運交易所,Clarksons,上海國際航運研究中心整理顯示,截止2020年4月初,國際干散貨船隊運力共計12038艘,8.86億載重噸。干散貨船是用以裝載無包裝的大宗貨物的船舶,專用于運送煤炭、礦砂、谷物、化肥、水泥、鋼鐵等散裝物資。在運輸過程中,如果相鄰兩航次裝載不同種貨,在下次裝貨之前貨艙要經過嚴格的清洗,即掃艙又稱備艙。目前,對散貨船貨艙進行掃艙作業普遍采用人工作業的方式。由工作人員手持高壓消防設備,在強壓作用下將水噴向大艙室表面,經常需要登高做作業。
1.1 干散貨船洗艙作業制約因素
干散貨船洗艙作業受到以下方面因素限制:①人力資源限制。一艘遠洋船舶配員一般二十人左右,除去正常船長、輪機長和正常值班人員,可以參加航行中掃艙工作的人員為7-8名,而船東或租家也不太可能為了洗艙作業的需求,而額外雇用人員上船協助洗艙。②惡劣天氣下,船員要在沒有升降梯,并且船體搖晃劇烈的情況下來完成洗艙工作,危險系數比較高。3)大艙結構及環境影響,如圖1所示。船舶貨艙高度(從艙底板到艙口圍)約為十幾米至二十幾米,貨艙前后左右四面的艙壁幾乎成直角,四周斜坡高度約3米多高;貨艙左右兩旁的艙壁無任何可以站人或固定的地方,貨艙前后兩面的艙壁除了直梯附近及澳洲梯內部外,同樣無任何可以站人或固定的地方。

圖1 貨艙艙壁圖片
1.2 干散貨船掃艙作業的方式
目前干散貨船掃艙主要以人工清洗方式為主,如圖2所示。前、后、左及右艙壁的垂直面。艙壁的垂直面的高處以采取兩人一組,并運用三段式的鋁制伸縮梯為踏板,而水手則站在伸縮梯上,同時再運用鋁制伸縮桿的海綿刷或自行利用長竹桿組裝而成的海綿刷來進行貨艙高處洗艙作業,而其下方再由另一名水手協助固定。

圖2 人工高空掃艙
2.自動掃艙機控制系統
為了降低人工掃艙作業時的作業風險提高船員工作的舒適度等問題,擬研發一種自動掃艙機,現就其控制系統進行介紹。
自動掃艙機控制系統是其神經中樞,負責控制設備的行走、轉向及船艙室表面清洗工作,同時反饋現場傳感器采集的信號并進行處理。控制系統的功能就是對組成自動掃艙機的各分系統進行協調和控制,同時完成各系統狀態的監視和顯示。
運動控制是自動掃艙機最低控制的主要內容之一,主要內容包括前進控制、高度控制、速度及方向控制以及定位控制等。其中前進控制指控制從艙室地面到自動掃艙機重心的垂直距離,高度控制目標為控制從艙室地面到自動掃艙機重心的垂直距離、速度方向控制要實現自動掃艙機速度控制以及方向。主要閉環控制包括,前進回路、高度回路和方向回路等,自動定前、自動定高和自動定向是這些閉環回路簡稱。
2.1 速度與方向控制回路
自動掃艙機的速度與定向控制均屬于水平面內的控制,可暫時忽略垂向運動的影響。水平速度一般以縱向速度u作為被控量構成閉環控制系統。具體而言,速度控制是指在自動掃艙機控制器作用下能夠按照設定的標準速度運動,其運動過程起始段為變加速運動,一旦實際運動速度達到給定速度值便保持該速度做勻速直線運動。
在速度控制回路中(如圖3 所示),速度反饋是一重要環節,采用多普勒聲學測速原理獲得自動掃艙機相對于大艙室的速度,也就是自動掃艙機的固定坐標系下的速度。對測得的速度進行積分即可以得到自動掃艙機的計算行程。構成速度閉環后可以較為精確地控制自動掃艙機在大艙室中的行走速度。
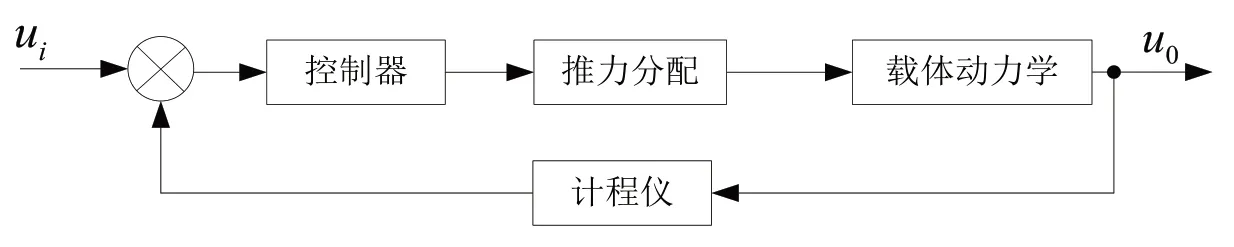
圖3 自動掃艙機定速控制回路
與速度控制回路類似,自動掃艙機的方向控制回路(如圖4所示)能夠使自動掃艙機自動保持給定的方向,其回路結構類似于自動前行控制結構,而且掃艙機定向可以使用羅盤來進行方向調整,實踐中在改善系統的閉環控制性能方面十分有效。
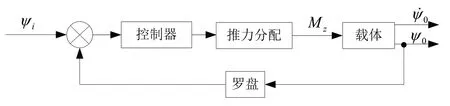
圖4 自動掃艙機定向控制回路
自動掃艙機在單自由度控制時,可以單獨對速度控制或對方向的控制與前進控制方法類似,在不考慮其他自由度上的耦合作用沒有外界任何擾動時,單一自由度上的運動應用大部分常規算法都能夠取得比較理想的控制效果;但是自動掃艙機是一個極為復雜的系統,系統自身非線性、強耦合等特點,再加上其工作環境的外界情況,使得如果考慮自動掃艙機的兩個及其以上的自由度的運動,自動掃艙機的控制效果將會大大降低,如果再加上海況的影響,則情況會更加惡化,出現不穩定的情況。
2.2 自動掃艙機前進控制回路與定高控制回路
前進控制與定高控制在自動掃艙機的結構上是完全相同的,如以長度計作為反饋元件,就稱為自動前進控制,若以高度計構成反饋回路就是自動定高控制,兩種回路不同時使用。考慮到穩心較高,一般不會產生大的偏向,故可以去掉速度反饋環節,而直接由長度計或高度計作為閉環,采用高度計作為閉環反饋時的定高控制回路(如圖5所示)。
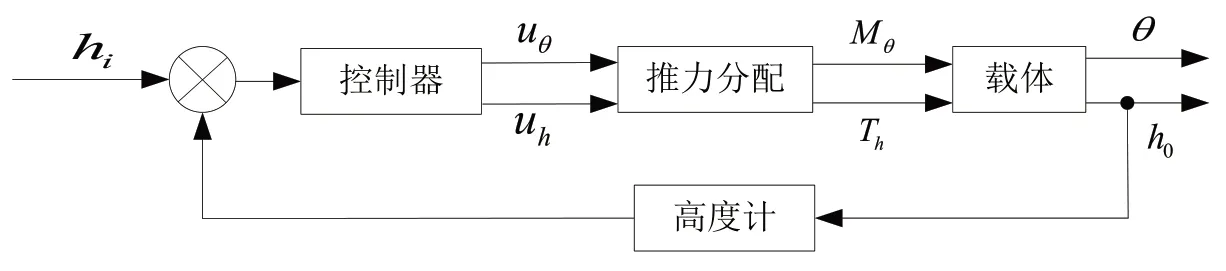
圖5 自動掃艙機自動定高控制回路
定位控制是掃艙機準確的進入某個平面位置并維持該位置稱為定位控制,也稱為動力定位,指在水平面內閉環系統中兩維空間的自動定位,即自動掃艙機在平面內保持位置量和以及位置角度量不變(如圖6所示)。
由圖6可以看到,自動掃艙機的定位控制與單一自由度運動控制不同之處在于,定位控制是多個單一自由度運動的聯合控制,需要考慮相關自由度間的耦合。
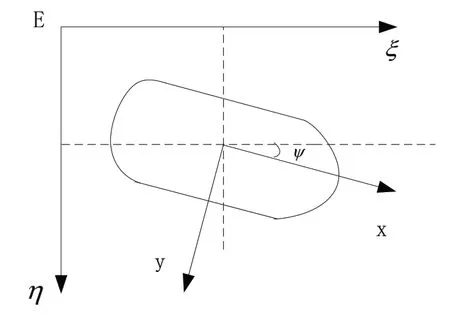
圖6 自動掃艙機三自由度定位示意圖
3.自動掃艙機遠程遙控系統的總體框架
控制系統是應用于船舶大艙室掃艙的自動掃艙機的重要組成部分,其負責完成對自動掃艙機的行走、轉向和掃艙作業功能的控制,保證掃艙機的預設和操作反饋的保持一致。
綜上對掃艙機的控制系統的要求:由于船員的工作強度大且海上工作環境的特殊性,在控制系統的研究方面可以類似使用無人機的遙控模式進行控制。掃艙機的控制是具有程序性和指令性雙重標準,當掃艙時在2-3s的時間內需要做出多個指令時,應當需考慮把重要且常用的多個指令集中在同一個控制面板上,不能在把指令集中在多個控制面板,以防止操作的連貫性與及時性不好,掃艙機在掃艙作業時要承擔多種任務角色,為了能夠最大程度的把掃艙機的經濟價值發揮出來,在掃艙機行走、轉向、掃艙清污、污水的回收處理等功能的控制,應當設計高的系統要求,這樣才把對多個任務的控制和轉換安全順利的完成。但是,為了完成不同的掃艙任務,掃艙機需要攜帶的負載設備多種多樣。掃艙之前如果增加的負載過多,會引起的磁力吸附不足使掃艙機墜落,引發危險和下方有人時造成船員傷亡的事故。因此在對控制系統研究應當選用遠程遙控裝置。
現今,隨著我國國內5G通信網絡技術的蓬勃發展,無線控制技術也有了很大的變化,而常見的控制方式分為有線控制和無線控制。為了保證自動掃艙機能夠在遠程遙控的情況下順利完成掃艙清洗任務,選擇合適的控制方式至關重要。
由表1中優缺點的對比,海上環境特殊性以及船員安全性的綜合考慮采用無線控制方式對自動掃艙機實現遠程控制。
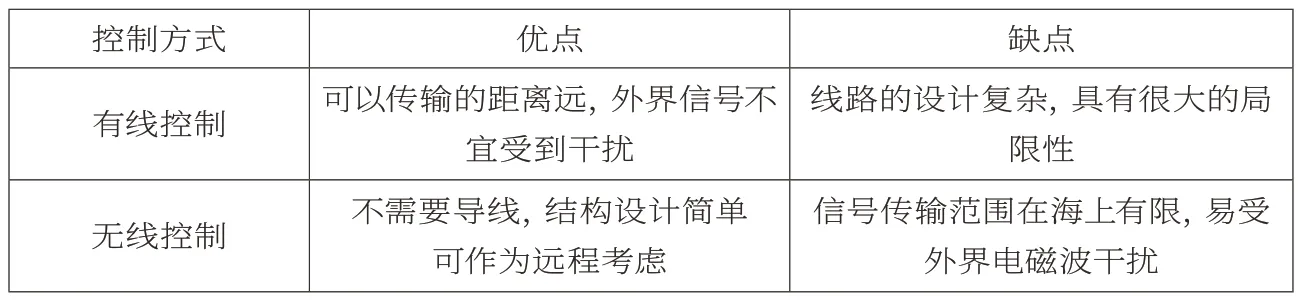
表1 自動掃艙機控制方式的優缺點
掃艙機的邏輯運行是通過接收器將移動APP控制的掃艙機動作信號進行接收,動作指令傳到掃艙機控制器是通過智能手機遙控邏輯回路,對動作信號的邏輯判斷通過控制器進行,一步一步將最終的控制指令通過邏輯回路發送至伺服電機的驅動器,讓其運動,從而達到精準控制掃艙機的按照預先設定的路線行走。
通過手機就可以讓船員控制自動掃艙機的實時動作和移動狀態,具有方便快捷的功能,非常地實用。為了能夠按照預先設定好的指令移動是控制系統的研發首要保證,這是最核心且基本的要求。遠程遙控系統是用智能手機移動APP的界面控制將訊息傳遞給掃艙機的接收裝置;通過移動APP軟件作為遠程控制系統的智能核心,其負責指令的執行及程序的控制。信號的接收和發出,其功能包括對掃艙機伺服電機的轉速、轉向、位置以及對搖擺機構進行控制、對超高壓水射流裝置的出水壓力的控制等。
控制系統的控制命令需要通過APP軟件的程序控制來獲得。自動掃艙機移動APP功能:完成移動APP的界面布局以及功能程序設置,遠程實時控制是通過該APP軟件對自動掃艙機的動作進行主要的控制。
4.結論
隨著自動化技術的發展,智能產品不斷誕生,改變了人們的生活和生產方式,本文就小型船舶自動掃艙控制系統提出了一些想法,希望在后續的學習中不斷地去完善和修改,能夠早日應用到掃艙作業中去,改善船員的工作條件,提高安全性和舒適性。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08