一種共軸雙旋翼式火星飛行器設計及其試驗驗證
2021-12-13 01:29:00朱凱杰唐徳威沈文清呂藝軒趙鵬越鄧慧超全齊全孟林智鄧宗全
宇航學報 2021年10期
朱凱杰,唐徳威,沈文清,呂藝軒,趙鵬越,鄧慧超,全齊全,孟林智,王 彤,鄧宗全
(1. 哈爾濱工業大學機器人技術與系統國家重點實驗室,哈爾濱 150001;2. 北京航空航天大學機械工程及自動化學院,北京 100191;3. 北京空間飛行器總體設計部,北京 100094)
0 引 言
火星具有與地球類似的物理特性和地理特征,在資源開發與人類生存空間拓展方面獨具潛能,因而成為深空探測的重要對象[1-2]。截至目前,各國已開展了45次火星探測,主要探測途徑包括飛掠、環繞和著陸巡視等[3]。火星表面存在稀薄的低空大氣[4],這為火星飛行器巡視探測提供了可能[5]。
火星飛行器探測設想于二十世紀70年代被提出,此后各研究機構紛紛開展飛行器的概念設計,已提出包括固定翼式[6]、滑翔機[7]、撲翼式[8]和旋翼式[9]在內的多種構型。其中,旋翼式飛行器結構緊湊、可重復垂直起降且帶載能力強,成為火星探測較為理想的構型[10]。此外,旋翼式火星飛行器具有以下突出優勢:1)可在漫游車無法駛入的洞穴、崖壁等危險區域進行懸停拍攝和采樣返回;2)具備較強機動性,可拓展探測范圍并加快巡視速度;3)可構建星表三維地形圖像以輔助漫游車規劃探測路徑[11]。
火星低空大氣主要成分為二氧化碳及少量氬氣和氦氣[12],平均大氣密度僅為地球大氣的1.29%,這導致工作在低雷諾數流場中的飛行器槳葉表面產生層流分離,進而降低旋翼氣動效率[13]。“海盜號”著陸區附近星表平均溫度變化范圍為-120~-60 ℃[14]。低溫導致槳葉周圍馬赫數升高,并引起槳尖空氣壓縮與激波震蕩。此外,火星表面存在的火星風、復雜氣旋和塵暴環境也對火星飛行器的抗干擾能力和增穩飛行控制提出了挑戰[15]。
斯坦福大學Kroo等在2000年研制了一款微型四旋翼火星無人機Mesicopter[16],由于其控制系統不完善且帶載能力極低而未獲得實際應用。美國NASA于2002年開展了旋翼式火星飛行器MARTA的概念設計,并研制了兩代樣機TAMS與TAMS-II驗證其飛行原理、控制技術和采樣方案[17]。馬里蘭大學的Datta等與佐治亞理工大學的O’Brien于2003年分別設計了共軸雙旋翼與四旋翼兩種構型的火星飛行器[18-19],但均停留在概念建模與參數設計階段。薩里大學的學者從2004年至2017年研制了四代固定翼-旋翼復合式火星飛行器,利用多傳感器融合實現狀態估計,通過調節旋翼轉速與副翼角度實現飛行控制[20-23]。日本東北大學的Aoki等針對JAXA的火星表面坑洞探測計劃設計了一種共軸旋翼式火星飛行器[24],并結合數值模擬與實驗方法優化了旋翼槳葉參數。美國噴氣推進實驗室針對NASA的“Mars 2020”探測計劃研制了“機智號”火星直升機以輔助“毅力號”漫游車探測[25],并采取優化翼型、提高轉速和增加槳葉展長等措施設計了帶載能力更強的火星科學直升機[26]。火星直升機通過一對反向旋轉的共軸旋翼產生垂直動力,利用斜盤機構實現調姿,具備導航、控制和制導功能[27]。哈爾濱工業大學的全齊全等設計了一種適用于火星旋翼無人機的槳葉翼型,并通過實驗驗證了其在火星大氣下的帶載能力和續航性能[28]。南京航空航天大學的李臣亮等提出了一種魯棒自適應調參方法,可控制火星無人機在不同高度和速度下穩定飛行[29]。
目前,國內外關于旋翼式火星飛行器的相關研究仍處于起步階段。除美國NASA研制了可執行探測任務的火星直升機外,大多數研究機構僅停留在飛行原理驗證和低雷諾數槳葉氣動特性研究階段。本文考慮火星特殊大氣環境對旋翼氣動特性的影響,優選了一種可在低雷諾數條件下產生高升阻比的槳葉翼型,基于葉素動量理論和旋翼間氣動干擾理論,提出了一種旋翼槳葉氣動特性預測方法,選擇了槳葉平面形狀與扭轉角等結構參數和旋翼轉速與安裝角等飛行參數,設計了一種共軸雙旋翼式火星飛行器,構建了地面模擬試驗裝置,驗證了飛行器在模擬火星環境中的帶載懸停飛行能力。
1 共軸雙旋翼式火星飛行器設計
1.1 旋翼槳葉結構設計
火星低密度大氣環境導致飛行器旋翼槳葉工作雷諾數范圍為103~104,即處于亞臨界雷諾數狀態。該狀態下的旋翼槳葉表面層流未過渡到湍流而直接發生分離引起流動附著區域減小,使槳葉所受阻力急劇增加;另一方面,邊界層位移厚度增加會導致翼型有效彎度減小,進而使得槳葉產生升力減小[30]。
為獲得較高的升阻比,火星飛行器槳葉翼型應具有以下特點[31]:1)厚度較小,以弱化湍流過渡相對壓力梯度的滯后效應;2)彎度較大,通過減小來流與翼型上表面夾角減小氣動阻力,并通過在翼型下表面的大彎度區域處生成湍流來增加升力;3)前緣半徑較小,可使湍流過渡點前移,從而使前緣分離流在翼型下游二次附著。
利用計算流體力學數值模擬方法在NACA四位數翼型族中優選氣動性能最佳的翼型。已有探測數據表明,流體連續性假設適用于火星大氣流場,故選擇流體控制方程為Navier-Stokes方程。考慮近壁面流體中剪切應力傳播與遠壁面流場模擬精度,選擇湍流模型為剪切應力傳輸k-ω模型。考慮火星表面大氣的可壓縮性,設置流動入口與出口為壓力遠場邊界條件。考慮槳葉加工工藝性,選擇升阻比最佳的NACA 6904翼型[32],如圖1所示。該翼型相對彎度為6%,最大彎度位置為90%,相對厚度為4%。

圖1 NACA 6904翼型幾何形狀Fig.1 Geometry of NACA 6904 airfoil
前期實驗研究表明平面形狀為矩形的槳葉可產生足夠升力[28],但其槳尖氣動載荷會導致旋翼系統振動與噪聲,且槳尖在高速旋轉中會產生失速現象,故選擇槳葉的平面形狀為梯形,如圖2所示。為保證飛行器在火星大氣中的帶載能力,選擇旋翼槳盤直徑為1 m。考慮到槳葉根部形狀對產生升力的影響較小,故選擇展長20%以內為根切過渡段,以使最大弦長能過渡到槳轂安裝尺寸。槳葉最大弦長位于展長20%處,為100 mm;為了保持槳葉整體推力水平,選擇槳尖弦長為40 mm。

圖2 旋翼槳葉的平面形狀Fig.2 Geometry of a twist-free rotor blade
槳葉根部至槳尖的總扭轉角度為10度,且扭轉沿展向線性分布,如圖3所示。槳葉通過可手動更換的鋁合金槳夾安裝在槳轂上,實現安裝角度的高精度調節。槳葉氣動中心軸線通過槳夾安裝孔,也是翼型扭轉的旋轉中心,這樣可以避免附加的氣動力矩對槳葉產生破壞。考慮到質量約束和剛度、強度要求,采用3D打印技術加工槳葉模具,利用碳纖維-環氧樹脂層疊復合材料完成槳葉毛坯加工,固化后去除毛刺并進行二次機加,最后進行表面處理。

圖3 火星飛行器旋翼槳葉Fig.3 A rotor blade of the Mars rotorcraft
1.2 旋翼氣動特性數值模擬
定義旋翼入流比λi為槳盤誘導速度與合速度比值。當旋翼系統懸停時,將槳葉沿展向劃分為葉素微元,可得無量綱展向位置r處葉素入流比λi(r)為:
(1)
式中:σ為旋翼實度,即槳葉面積與槳盤面積比值;θ為槳葉安裝角;Cl為葉素升力系數,依據普朗特理論,可表述為:
(2)
式中:α為來流迎角;β為雷諾數影響指數;R為旋翼半徑,500 mm;Mr為不同展長處葉素馬赫數;Clα為翼型升力系數曲線隨迎角變化的斜率。利用入流比λi計算葉素微元推力系數并沿展向積分得到槳葉推力系數和功率系數為:
(3)
式中:Cd,0為翼型零升阻力系數。基于空氣動力學的動量理論計算單旋翼產生推力Ts及功率Ps為:
(4)
式中:ρ為火星大氣密度,0.0166 kg/m3;A為旋翼槳盤面積;Ω為旋翼轉速。由于下旋翼槳盤位于上旋翼滑流下游,其產生推力及氣動效率會因此而顯著降低,故共軸雙旋翼的升力與功率均會低于兩個單旋翼相加的總和。定義誘導功率因數κi為共軸雙旋翼消耗功率與兩個單旋翼消耗功率之和的比值。按Leishman等提出的共軸雙旋翼間氣動干擾理論[33],在上下旋翼轉速相同且旋翼間距為旋翼直徑的10%時,κi值約為0.78,此時推力比值約為0.85。
針對翼型為NACA 6904的矩形槳葉開展的氣動特性測試試驗表明[28],旋翼槳葉在根部安裝角為30°時可獲得最高氣動效率,故選擇槳葉根部安裝角為30°。對旋翼周圍流場劃分非結構的滑移網格,并對外圍流場劃分結構網格,按火星大氣條件設置數值模擬參數與邊界條件,選擇剪切應力傳輸k-ω模型模擬湍流。假設上旋翼氣動特性未受下旋翼來流影響且兩個旋翼轉速相同,對共軸雙旋翼系統產生推力及消耗功率進行數值模擬。
旋翼系統產生推力與消耗功率隨轉速變化曲線分別如圖4和圖5所示。旋翼產生推力隨轉速增加而增大,且推力增速也逐漸加快。當上下旋翼轉速均為2140 r/min時,共軸旋翼系統可產生升力為7.35 N。考慮到火星重力加速度約為地球重力加速度的3/8,共軸旋翼系統可在火星環境下帶載2.0 kg。

圖4 火星大氣下共軸雙旋翼系統推力隨轉速變化Fig.4 Variation of the generated thrust with the rotational speed of the coaxial rotor system in the Martian atmosphere

圖5 火星大氣下共軸雙旋翼系統功率隨轉速變化Fig.5 Variation of the required power with the rotational speed of the coaxial rotor system in the Martian atmosphere
旋翼消耗功率隨轉速增加而增大,且單位轉速的消耗功率也逐漸增加。當兩個旋翼轉速為2140 r/min時,共軸雙旋翼系統消耗功率為133 W。依據共軸雙旋翼氣動特性數值模擬結果,選擇火星飛行器旋翼參數見表1。

表1 火星飛行器旋翼參數Table 1 Rotor parameters of Mars rotorcraft
1.3 樣機結構與控制系統設計
在完成旋翼槳葉設計的基礎上,設計了共軸雙旋翼式火星飛行器樣機“火星飛鳥-I”,其機械結構如圖6所示。火星飛行器的主結構是一根中央安裝管,其通過法蘭接口與推進性能測試裝置相連。“火星飛鳥-I”以兩個并排布置的推進電機為動力輸入,通過兩對嚙合的圓柱齒輪將運動和動力分別傳遞至上、下旋翼傳動軸,進而利用槳轂和槳夾驅動兩個共軸布置、反向旋轉的旋翼。傳動軸間布置深溝球軸承以減小兩個旋翼傳動軸間、傳動軸與機體間的摩擦阻力,并保證軸間的同軸度。

圖6 “火星飛鳥-I”的結構Fig.6 Structure of the “MarsBird-I”
考慮機構受力特點,選擇各齒輪模數均為1 mm、厚度均為6 mm,主動輪齒數為28,從動輪齒數為110,故傳動比i為3.93。依據雙旋翼氣動特性預測結果,可計算推進電機的轉速nm和功率Pm
(5)

表2 “火星飛鳥-I”組成部分質量分配Table 2 Quality distribution of each part for “MarsBird-I”
“火星飛鳥-I”的控制系統組成如圖7所示。上位機搭載控制程序界面,通過交叉網線與工業控制計算機進行數據交換,下位機的數據采集卡向電機驅動器發出轉速控指令并接收數據。選擇型號為ESCON 70/10的maxon驅動器對推進電機施加控制電壓以控制其轉速,采集編碼器的脈沖信號并轉換為電壓輸出以實現電機轉速和電流的實時監測,進而獲得旋翼所受反扭矩和消耗功率值。

圖7 “火星飛鳥-I”的控制系統Fig.7 Control system of “MarsBird-I”
“火星飛鳥-I”利用共軸雙旋翼實現推進與懸停控制,相對其他研究機構提出的多旋翼構型和固定翼-旋翼復合構型而言,系統復雜度更低且結構緊湊;“火星飛鳥-I”的槳葉具有獨特的NACA 6904翼型和梯形平面形狀,相對馬里蘭大學共軸式火星飛行器所采用的蒙皮骨架式槳葉結構,具備更簡單的結構和更強的單位質量帶載能力。
2 地面測試試驗裝置設計
2.1 火星大氣環境模擬器設計
為開展火星飛行器樣機推進性能測試試驗,構建火星大氣環境模擬系統,如圖8所示。

圖8 火星大氣環境模擬器Fig.8 Martian atmosphere simulator
模擬器由罐體、泵組、比例閥、傳感器與電控系統組成。罐體為圓柱形,其高度和直徑均為3 m,由厚度為10 mm的鋼板焊接而成,其底部焊接九宮格排布型式的工字形槽鋼。罐壁焊接各類法蘭接口以連接管道與傳感設備,并安裝有兩個觀察窗以便實驗人員觀察設備運轉狀況。實驗裝置安裝在罐體內部,其電氣線路通過罐壁航空插頭接口法蘭接至模擬器控制柜。兩級泵組用于降低罐內氣壓,通過控制柜內變頻器實現啟停控制。旋轉葉片泵將罐內氣壓降至羅茨泵啟動壓力,羅茨泵進一步將罐內氣壓降至火星表面壓力。金屬波紋管連接泵組與罐體,可減小氣體傳輸過程中泵組振動對連接密封性產生的影響。手動蝶閥用于控制泵組至罐體的氣體通道通斷,可在泵組停轉后保持罐內壓力。連接二氧化碳氣瓶的進氣比例閥用于模擬火星表面大氣成分,與泵組聯合改變罐內空氣成分。考慮抽氣后罐體內氣體壓力不均對測量產生的影響,沿豎直方向在罐壁布置三個低壓測量精度較高的電容薄膜真空規,利用壓阻電阻復合真空規為電容薄膜規提供氣壓值調零參考。泄氣閥用于在實驗結束后利用內外壓差向罐內充入大氣以使其恢復環境氣壓。實驗人員通過槽型艙門進入罐內進行操作。
火星大氣環境模擬器電氣控制系統包含計算機單元、泵組控制單元、壓力調節單元和傳感單元。上位機運行人機交互界面,并通過交叉網線獲取、存儲并分析下位機采集的實驗數據。下位機包含CPU和數據采集卡等,通過接線端子連接繼電器、驅動器和真空規等元器件。繼電器驅動電路控制時間繼電器和電磁繼電器通斷,進而控制泵組控制柜中的變頻器和風機,最終控制泵組啟停與轉速。
圖4給出了微通道分支數n =3,熱流密度=30W/cm2,質量流率=3g/s時熱沉熱應力云圖的外視圖、側視圖,熱沉微通道結構的熱應力云圖和熱沉熱應力切片云圖。
壓力控制單元是模擬器控制系統的核心,氣壓調節控制流程如圖9所示。上位機向下位機發出指令氣壓信號后,旋轉葉片泵啟動并按指定速度抽氣。壓阻電阻復合真空規實時監測罐內氣壓值,并將數據傳輸至上位機。當罐內氣壓低于羅茨泵啟動壓力后,羅茨泵使能并運轉。上位機通過電容薄膜規實時監測罐內氣壓值,并將數據反饋給控制器。泵組與比例閥控制程序在對比實際氣壓與期望氣壓后將控制電壓輸給泵組變頻器與比例閥驅動器,進而調節泵組轉速與比例閥開口大小,實現罐內氣壓控制。

圖9 火星大氣環境模擬器控制系統架構Fig.9 Architecture of the Martian atmosphere simulator control system
火星大氣環境模擬器技術參數見表3,滿足火星飛行器推進性能測試試驗所需環境要求。

表3 火星大氣環境模擬器技術參數Table 3 Specification of Martian atmosphere simulator
2.2 重力補償與運動約束裝置設計
為驗證火星飛行器的負載能力與懸停性能,在模擬火星大氣環境與重力場條件下,對“火星飛鳥-I”推進性能展開試驗研究。重力補償與運動約束裝置安裝在火星大氣環境模擬器內,控制線纜通過罐體壁面航空插頭法蘭接到控制柜內,如圖10所示。
為驗證“火星飛鳥-I”的推進性能,需研究能使樣機克服2.0 kg火星重力所需的上下旋翼轉速,應消除由于上下旋翼轉速不匹配而引起樣機偏航角所帶來的干擾。裝置采用滾珠花鍵結構以確保鍵軸與鍵母之間僅存在上下移動的自由度,可解決系留樣機自轉引起的線纜纏繞問題。“火星飛鳥-I”通過其底部法蘭安裝在滾珠花鍵軸頂端,花鍵母與底座安裝法蘭相連。花鍵軸底部安裝限位塊,以防止樣機脫離測試裝置。限位塊底部粘貼彈性緩沖墊,以防止推力不足時樣機瞬間下落引起的機械破壞。將兩組對稱布置的砝碼系在尼龍繩上繞過定滑輪以補償地球和火星間的重力差異。滑輪懸吊在通過支承立柱與安裝法蘭相連的滑輪安裝板上。試驗開始前,試驗人員使用拉力計模擬旋翼向上的推力,并通過調節砝碼質量控制樣機起飛推力。
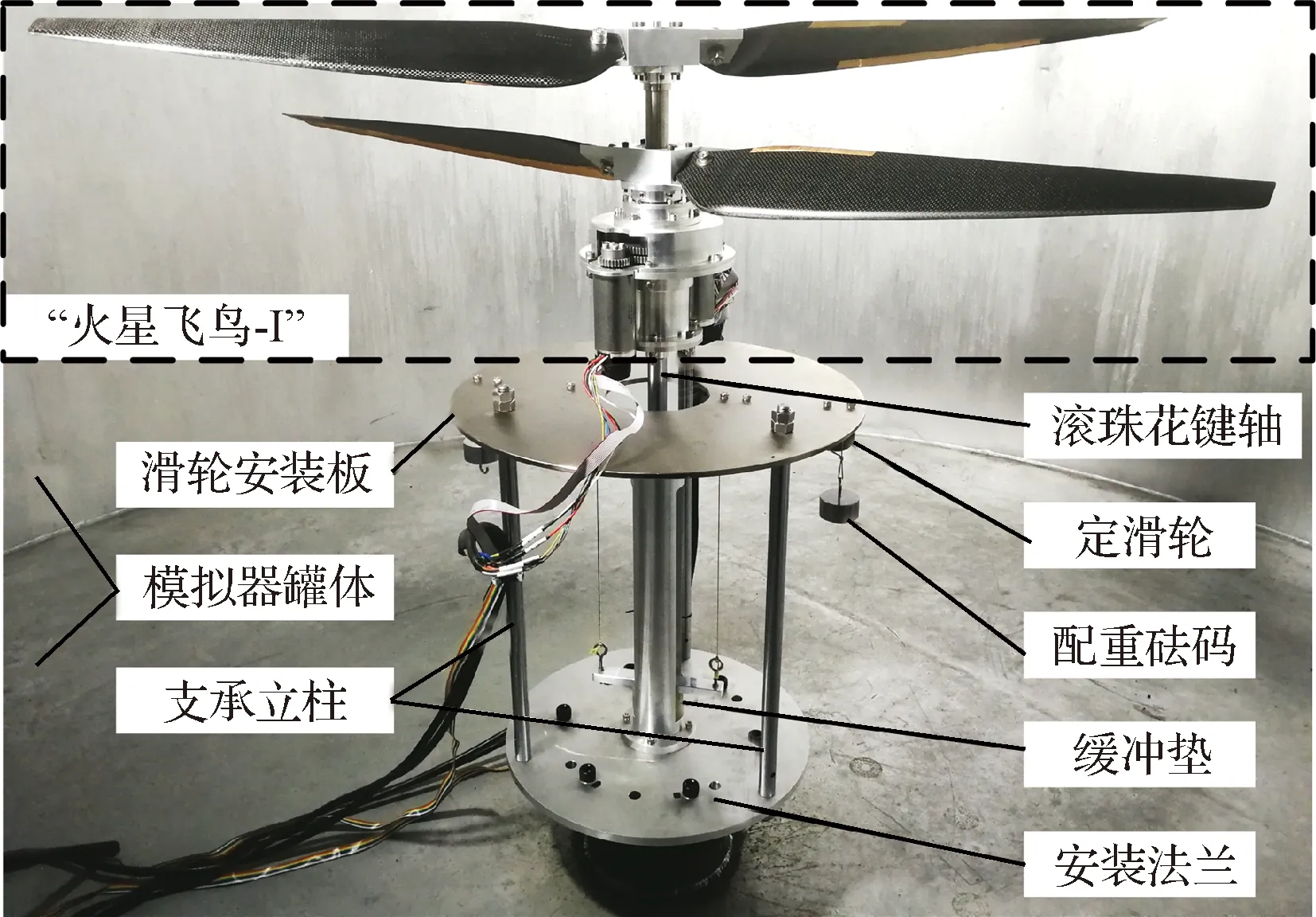
圖10 “火星飛鳥-I”及其試驗裝置Fig.10 “MarsBird-I” and its experimental setup
3 火星飛行器推進性能驗證
為驗證火星飛行器旋翼在低雷諾數流場中的推進性能,需保證試驗環境大氣密度與實際火星大氣密度一致。試驗條件依據理想氣體狀態方程確定:
(6)
式中:PExp為試驗環境氣壓;PMars為火星表面平均氣壓;TExp為試驗環境溫度,TMars為火星表面平均溫度;MExp為試驗中環境氣體平均分子量,取空氣相對分子質量,MMars為火星表面氣體平均分子量,取二氧化碳相對分子質量。試驗條件與火星大氣條件各項物理量對比見表4。經計算,推進性能試驗環境具有與典型的火星實際環境一致的大氣密度。

表4 推進性能試驗條件與火星實際大氣條件對比Table 4 Comparison of propulsion performance test conditions with actual atmospheric conditions on Mars
按上述測試條件設置火星大氣環境模擬器內壓力,開展“火星飛鳥-I”的垂直飛行與懸停試驗。依據火星重力與地球重力的差異,調節試驗裝置中配重砝碼的質量以模擬火星環境中的不同載荷,同步提高上下旋翼轉速,并記錄不同負載下飛行器穩定懸停于一定高度的旋翼轉速,見表5。試驗表明“火星飛鳥-I”帶載能力隨轉速增加而逐漸增強。

表5 “火星飛鳥-I”懸停飛行帶載性能Table 5 Hover performance of “MarsBird-I”
“火星飛鳥-I”在模擬火星環境中帶2.0 kg載荷的飛行試驗如圖11所示。初始時刻,雙旋翼保持靜止,如圖11(a)所示;同時增加上下旋翼轉速,發現當上下旋翼轉速均為2170 r/min時,樣機可克服模擬火星重力起飛,如圖11(b)所示;繼續增加兩個旋翼轉速,樣機垂直飛行高度逐漸增加,如圖11(c)所示;同時調整雙旋翼轉速,發現當上下旋翼轉速均為2160 r/min時,樣機可在固定高度穩定懸停,如圖11(c)與圖11(d)所示。
“火星飛鳥-I”穩定懸停時,上旋翼推進電機電流值為7.35 A,即消耗功率為176.4 W;下旋翼推進電機電流值為7.3 A,即消耗功率為175.2 W。樣機懸停消耗總功率為351.6 W,與數值預測結果對比,可知旋翼傳動機構總效率約為37.82%。試驗表明,設計的旋翼系統具有良好的低雷諾數環境懸停性能,“火星飛鳥-I”可在模擬火星環境下懸停飛行。
4 火星飛行器技術展望
基于“火星飛鳥-I”的設計過程與地面試驗驗證結果,旋翼式火星飛行器設計與控制技術在以下方面尚存在研究價值:
1) 旋翼驅動與傳動機構優化設計:“火星飛鳥-I”利用兩組齒輪傳動機構實現旋翼驅動,導致散熱困難,引起飛行效率的降低,故需優化傳動鏈設計以提高能量利用率。
2) 操縱機構設計與優化:“火星飛鳥-I”采用固定槳夾維持旋翼槳距角不變,這導致飛行器無法獲得俯仰力矩和橫滾力矩以調節位姿,故需設計旋翼操縱機構以調節旋翼轉速及槳距角變化規律,進而控制旋翼產生的力和力矩。
3) 飛行器機電控系統集成:“火星飛鳥-I”機械結構質量較大,需通過更換材料與結構拓撲優化等手段進行減重設計。此外,“火星飛鳥-I”需通過線纜連接至模擬器罐外的電氣控制硬件,屬于系留飛行器。為實現飛行器的工程化應用,需采用嵌入式硬件開發控制系統,并將控制電路集成化。
4) 狀態估計與自主飛行控制:“火星飛鳥-I”未安裝位姿傳感器,其垂直飛行與懸停均需手動控制。由于地球與火星存在通信時延,地面難以對飛行器發出實時控制信號,故需開發自主飛行控制算法。
考慮以上技術發展要素,提出具備飛行控制功能的火星飛行器設計方案,如圖12所示。該飛行器方案的主結構是中心承力管,采用兩個外轉子電機直接驅動上下旋翼,利用斜盤機構調節槳葉槳距角,以實現飛行中的位姿控制。傳感器、控制電路與有效載荷安裝在機身下方以降低整機重心位置,頂端的太陽能電池板用于為鋰電池組充電。

圖12 具備飛行控制功能的旋翼式火星飛行器方案Fig.12 Mars rotorcraft scheme with flight control function
具備飛行控制系統的火星飛行器以處理器、微控制器和FPGA構成控制系統的核心架構,如圖13所示。負責高層信息處理的處理器接收來自導航相機的圖像數據,將解算出的位置、姿態等導航信息傳輸至下一層的微控制器,將返回相機拍攝的照片通過Zig-Bee協議傳輸至漫游車基站的工作站,并接受來自基站的高級指令。微控制器通過FSMC(Flexible static memory controller)總線與底層的FPGA(Field pragrammable grate arragy)進行信息交互。FPGA直接控制推進電機及其驅動、操縱電機及其驅動、位姿傳感器、時間控制模塊、電源管理模塊和熱控模塊等。
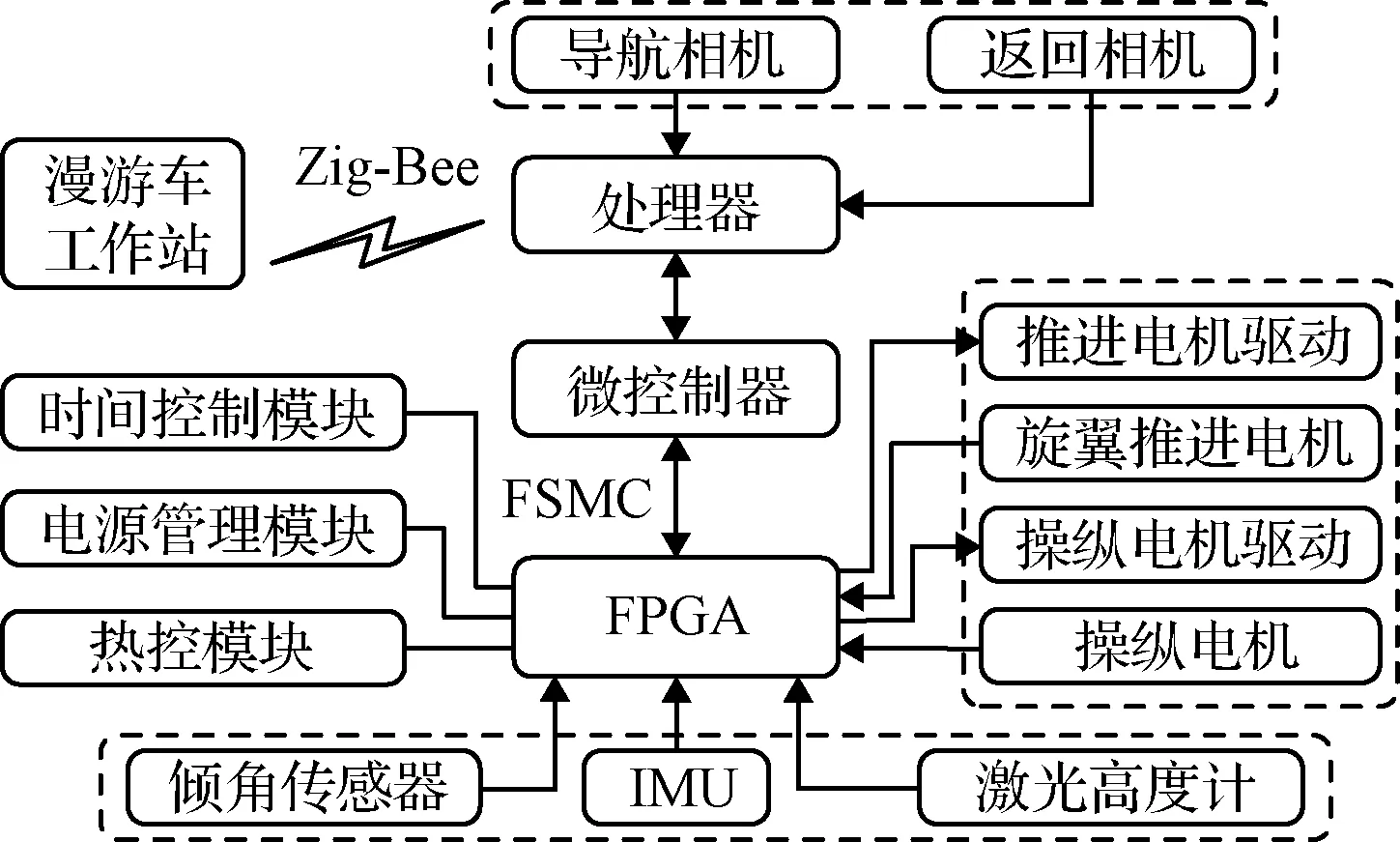
圖13 旋翼式火星飛行器的控制系統組成Fig.13 Control system composition of the Mars rotorcraft
5 結 論
1) 針對火星旋翼飛行器探測方案,考慮旋翼槳葉在火星大氣中的升阻特性,本文提出了一種可用于共軸雙旋翼式火星飛行器的槳葉構型,該槳葉翼型為NACA 6904、平面形狀為梯形且扭轉角線性分布,可為火星飛行器提供足夠升力并具有較高氣動效率。依據旋翼槳葉氣動特性數值模擬結果,優選了旋翼系統飛行參數,完成了原理樣機“火星飛鳥-I”的機電一體化系統設計。
2) 搭建了具有較強真空能力、較大試驗操作空間、較長壓力保持時間的火星大氣環境模擬器,采用兩級泵組抽取模擬器內空氣,利用進氣比例閥向模擬器內輸送二氧化碳,通過真空規測量模擬器內氣壓以實現壓力閉環控制。構建了重力補償與運動約束裝置,可補償地球重力場與火星重力場的差異,提供火星飛行器推進性能地面測試條件。
3) 開展了模擬火星環境條件下的火星飛行器推進性能測試,驗證了“火星飛鳥-I”可帶2 kg載荷在模擬火星條件下垂直飛行和穩定懸停。分析了旋翼式火星飛行器技術的發展方向,并提出了具備飛行控制功能的旋翼式火星飛行器設計方案。
本文研究成果為我國火星探測工程中火星飛行器旋翼系統設計與飛行原理驗證提供了一種技術參考。
