基于機械視覺和一字激光器識別農田地壟截面特征的研究
2021-12-14 09:03:28耿欣李君興董云哲于海濤孫玲徐慧磊譚杰
農業與技術 2021年23期
耿欣 李君興 董云哲 于海濤 孫玲 徐慧磊 譚杰
(吉林省農業機械研究院,吉林 長春 130011)
引言
作為人口大國,人口的數量不斷增長,各種糧食蔬菜等農副產品的消耗也隨之增長,這就需要在有限的土地資源上,不斷提高農作物產量、優化土壤環境,促使我國必須走精準農業的道路。精準農業,就是通過對農業生產環節中各項因素的調節,以推動高效農業的發展,在減少投入、降低成本、減輕環境污染的同時,不僅能提高農產品的產量、質量,還能使農產品可控化、標準化和批量化,對于農產品的加工、出口等方面均有重要的作用和意義。如,精準施肥可以減少肥料的使用[1],以達到保護土壤的目的,精準施藥可以減少農藥的使用,以達到保護環境的目的等。
隨著計算機科學與圖像處理技術的快速發展,為精準農業的發展提供了必要條件,機器視覺技術的研究與應用已在農業工程領域,監測農作物長勢、病蟲害防治、農作物的識別與檢測、農作物自動收貨、農產品品質分類、運輸分揀加工存儲[2]等,在減少人工成本的同時,提高了勞動質量和效率。
本文基于圖像處理技術,采用一種自動化的識別方式,識別地壟橫截面的主要特征,比傳統的格尺測量效率更高,該方法得到的數據可以方便傳給計算機做后處理。識別地壟特征主要意義是用于自動化智能農機設備,如東北很多農村的農田大小不一、形狀各異,不同歸屬的農田交織相錯,不適合大型農機的作業,只能用小型犁地機手動進行起壟操作,地壟的間距不一、高矮不同,并非像大型農機那樣起壟非常標準,后續小功率智能農機進場,就需要對地壟基本形態做一個識別,如判斷壟頂的位置,方便播種機或是施肥施藥機進行精準作業;判斷壟溝的位置,方便農機車輪實時調整間隙及方向,防止破壞地壟或是壓苗。所以地壟截面特征自動化識別,對農機的智能化具有積極的意義。
1 實驗設備總體結構及其所需的軟硬件
1.1 總體結構
本實驗采用型號為1515的鋁合金型材搭建輔助測量機構框架,方便調節;激光器垂直照射地壟,一字光線垂直于地壟延伸方向;激光器發射端面距框架底面距離700mm,激光器中心距工業相機安裝孔距離500mm;工業相機安裝孔距底面距離700mm,相機的拍攝方向為水平向下45°角。
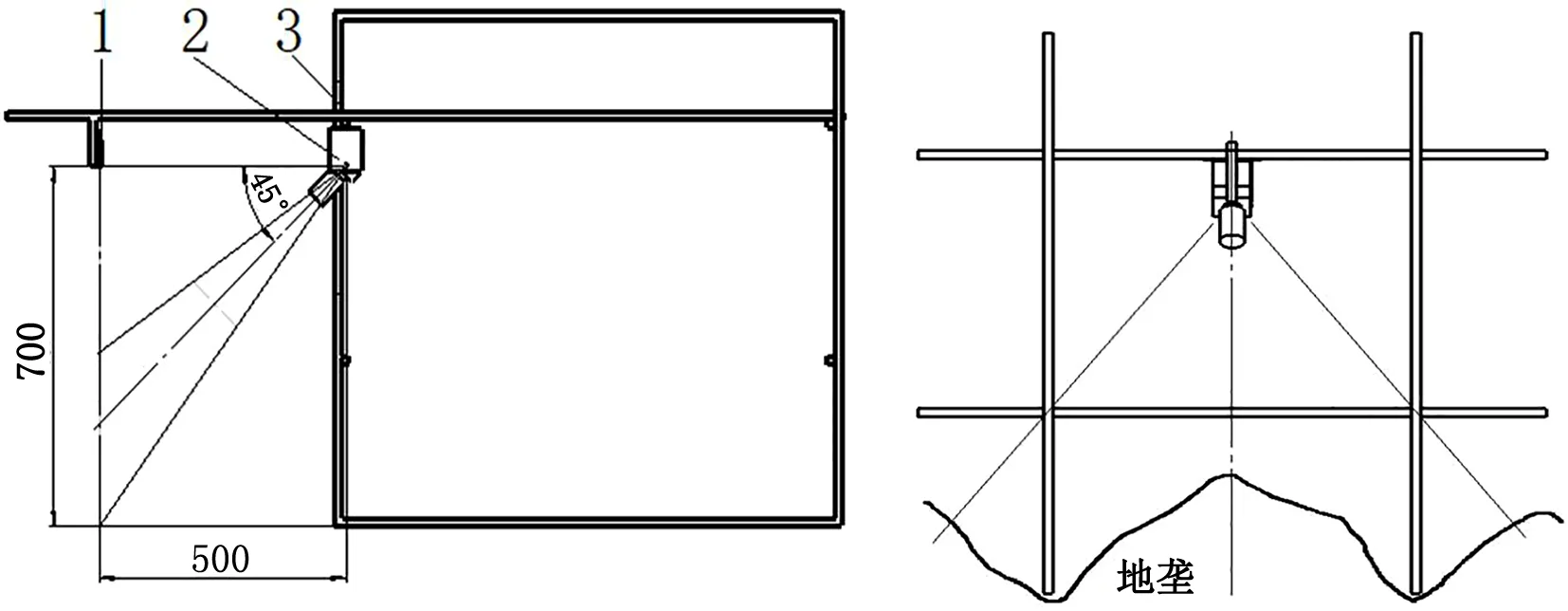
圖1 測量機構結構示意圖
1.2 硬件簡介
工業相機及鏡頭,接口USB 3.0,免驅動,200萬像素(1920×1080),30幀·s-1;
一字激光器,3.3V供電,功率5mw,波長650nm,可以發射一字形狀的激光;
筆記本電腦Win7 i5,帶USB 3.0接口。
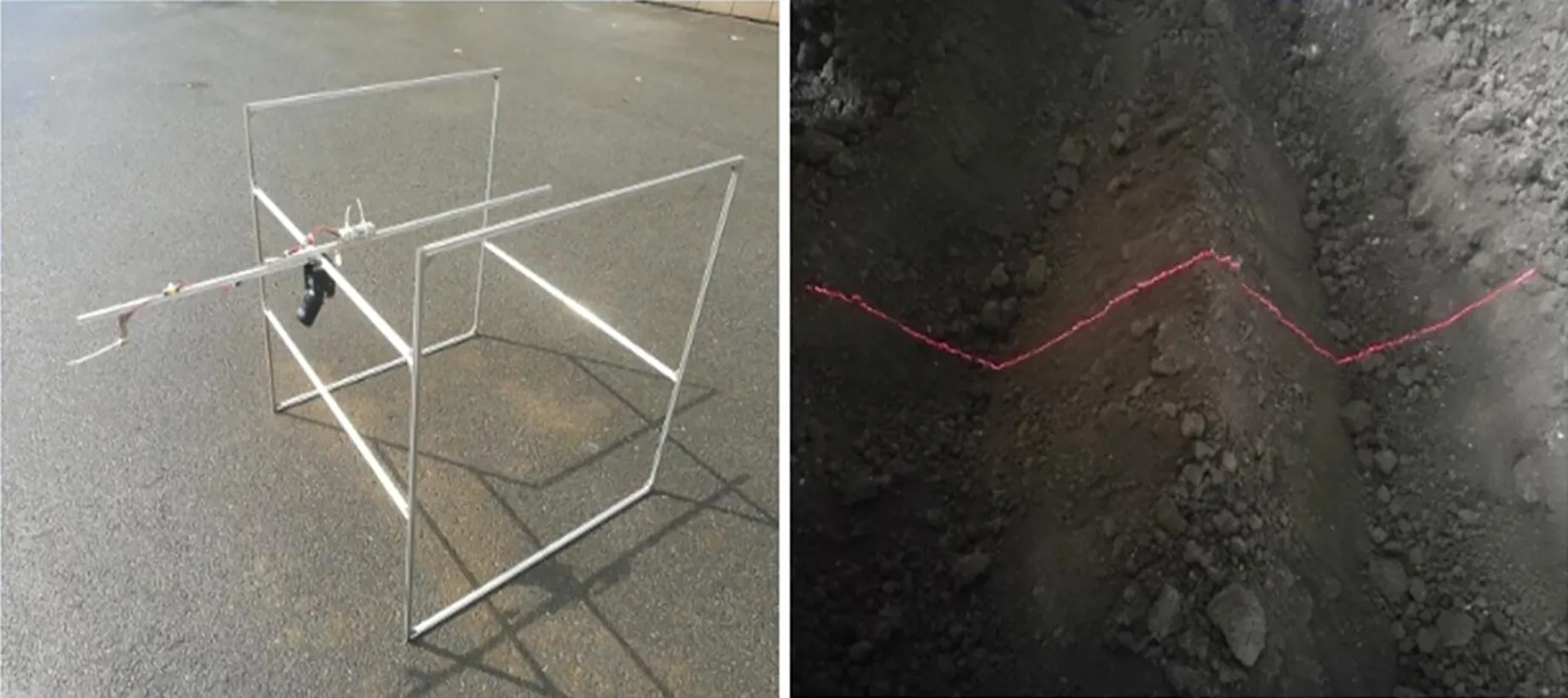
圖2 輔助測量機構實物 圖3 農田測量原始圖像數據
1.3 軟件簡介
QT5.9.1,QT是跨平臺C++圖形用戶界面應用程序開發框架,可以制作漂亮的軟件界面,各種2D/3D圖表,也可調用OpenCV里的函數進行圖像處理、數據分析。
OpenCV3.4.10,OpenCV是一個基于BSD許可(開源)發行的跨平臺計算機視覺和機器學習軟件庫,可以運行在Linux、Windows等操作系統上,其輕量級而且高效,實現了圖像處理和計算機視覺方面的很多通用算法。
2 數據處理過程
2.1 前期工作需要做2個標定
實驗所用相機存在圖像畸變,用標準棋盤格進行校正標定,標定結果如下。
相機內參數矩陣:

畸變系數:
[-0.5640860668260472,1.334478592907218,-0.001954098647446536,
0.003381037536167425,-3.584386632028848]
2個矩陣參數作為常量保存在程序里,用作圖像校正,以減少圖像的畸變。
計算相機像素尺寸與標準尺寸的平均比值,具體如表1所示。
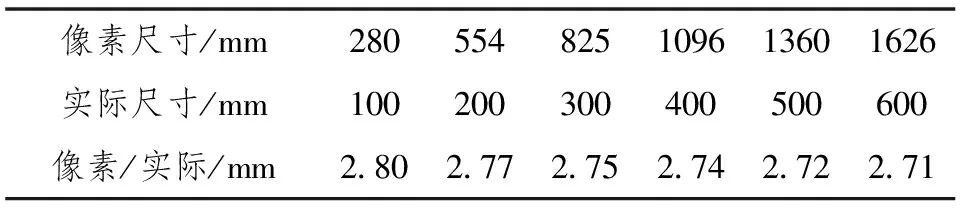
表1 像素尺寸與實際尺寸的比值ηi
平均系數計算公式:
(1)
式中,ηa為平均系數;ηi為每次測量得到的系數;n為測量的組數。
通過公式(1)計算,得相機像素尺寸與標準尺寸的平均比值ηa=2.75,即1mm≈2.75像素。
2.2 圖像處理過程
研究以圖3原始圖像數據為例,進行圖像處理分析。
實驗中的激光照射到土地上后偏紅色,把原始圖像數據轉換成HSV顏色空間的圖像,從而分離出紅色元素,對HSV圖像進行紅色范圍的二值化[3],得到了圖4。圖4是由不連續的點組成的圖像,需要擬合處理生成一條連續的折線,從圖片的左邊起,每30個相機像素采集一個白點,首尾相連,擬合后的折線圖像如圖5所示。
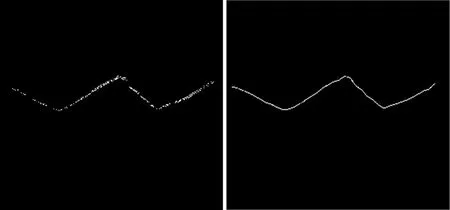
圖4 經過HSV處理的二值圖 圖5 生成連續折線
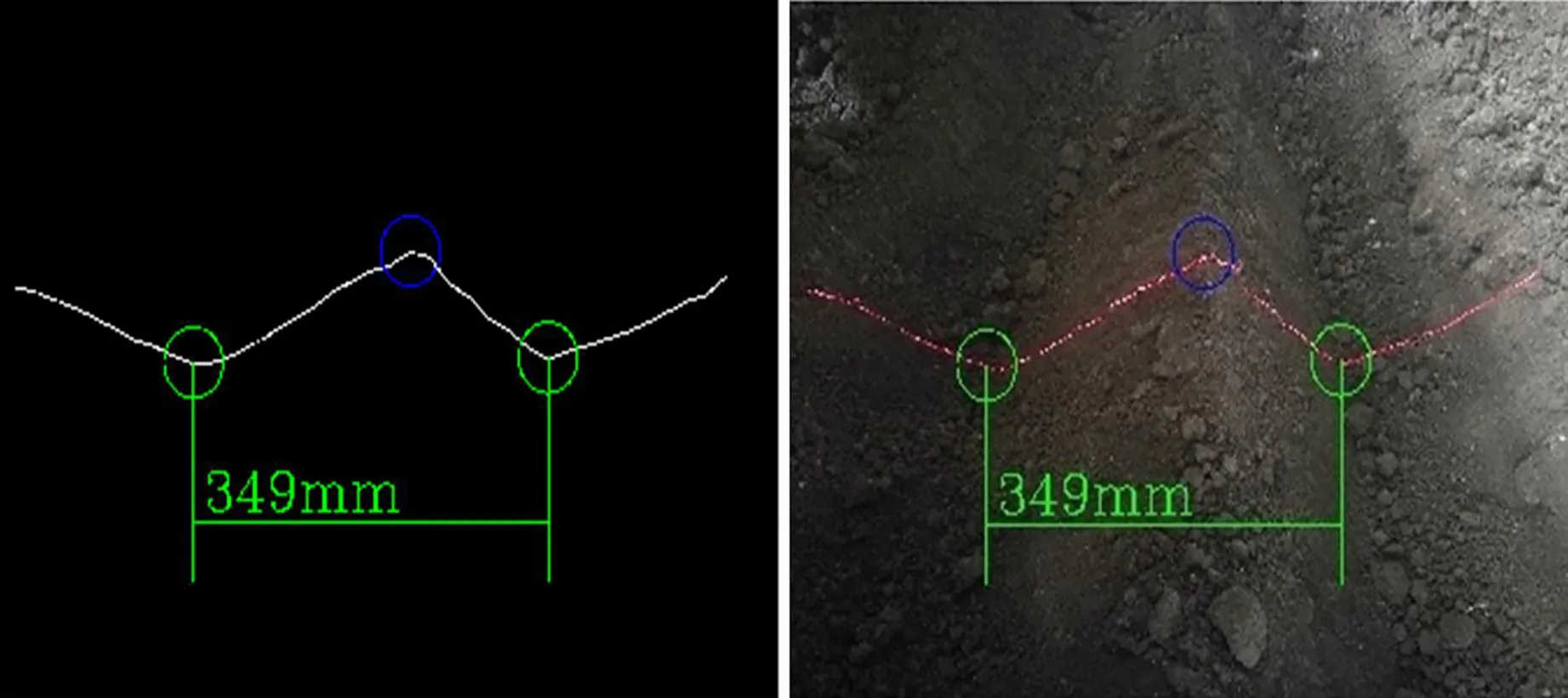
圖6 特征檢測與測量 圖7 結果顯示在原始圖上
圖6是通過對每段折線斜率的比較,得到連續折線的波峰和波谷,波峰即壟頂,用藍色圓圈標注,波谷即壟溝,用綠色圓圈標注。地壟寬度為2個波谷的距離,像素尺寸為960,根據公式(2)得到相鄰壟溝之間的距離為349mm,即地壟寬度尺寸。
地壟寬度計算公式:
(2)
式中,Lh為軟件換算后得到的地壟寬度,mm;Lx為圖像中壟溝的像素尺寸。
圖7為識別后的結果映射到原始圖數據上,方便直觀觀察。
3 測試結果及分析

表2 地壟寬度測量結果表
因為該實驗每30個相機像素采集一個白點,30個相機像素對應標準尺寸為11mm,所以每個白點的位置誤差為±11mm,由于地壟寬度是由2個白點的寬度計算得到的,所以該算法得出的地壟寬度誤差為±22mm,因為算法也屬于系統的一部分,所以也可看做系統誤差為±22mm。通過對幾組不同長度地壟寬度的測量,誤差均在系統誤差范圍內,符合實驗要求。
4 結束語
通過實驗結果的比較與分析得出,該方法可以較為準確地識別出地壟的壟頂、兩側的壟底,以及計算出地壟寬度,對農機的自動化、智能化具有積極的作用。本實驗由于采用識別激光線的方法測量,對光照要求較為嚴格,需要在灰暗的條件下進行。本實驗算法,只對截面類似于三角形的地壟有效,截面是梯形及復雜形狀的地壟該算法無法測量。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21