一種新型足式爬壁機器人設計
2021-12-14 07:16:14徐陽陽于江濤王亞州
實驗室研究與探索 2021年10期
關鍵詞:作業
霍 平,徐陽陽,于江濤,王亞州
(1.華北理工大學機械工程學院,河北唐山 063210;2.河北省工業機器人產業技術研究院,河北唐山 063210)
0 引言
隨著國家經濟快速發展,工業中的大型油罐、鋼結構及船舶等應用越來越廣泛,屬于長期作業設備,需要定期對其進行檢修,人工工作環境惡劣,存在安全隱患且作業效率低。對此,國內外學者開始設計研發爬壁機器人[1-5],使其代替人工完成作業。
本文針對船舶、大型罐體等大型金屬表面進行除銹、清洗、打磨等作業,設計一種新型框架足式爬壁機器人,與其他爬壁機器人設計不同[6-9],該爬壁機構的運動具有較好的直線性、平穩性,且能夠根據障礙物的大小、寬窄自動調節其邁步跨度和高度。
1 爬壁機器人整體結構設計
1.1 行走結構設計
行走機構是機器人的關鍵部件,不僅要求腿部結構簡單、運動精度高,還要求有較高的穩定性,滿足機器人的各項作業要求。本文的行走機構是仿人腿部,設計為左腿和右腿結構,既要保證機器人運動的穩定性,又要實現靈活、越障等優點。腿部結構設計成一種伸縮移動式結構,如圖1 所示。為保證機器人爬行過程結構緊湊,左、右腿分別對稱排列在本體框架兩側,腿部結構等效成一個等腰梯形的平面連桿機構,每條腿上有6 根拉桿,其中雙拉桿與單拉桿成對角分布,分別與前、后滑塊和底座連接,確保足部與本體框架、機器人與作業壁面所處平面始終保持水平,提高機器人的穩定性。
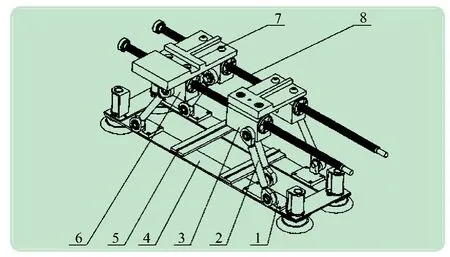
圖1 爬壁機器人腿部結構示意圖
1.2 傳動機構設計
傳動機構是爬壁機器人的核心部分,決定著機器人的運動精度、工作效率和工作質量,保證機器人的工作效率。爬壁機器人傳動機構示意圖如圖2 所示。
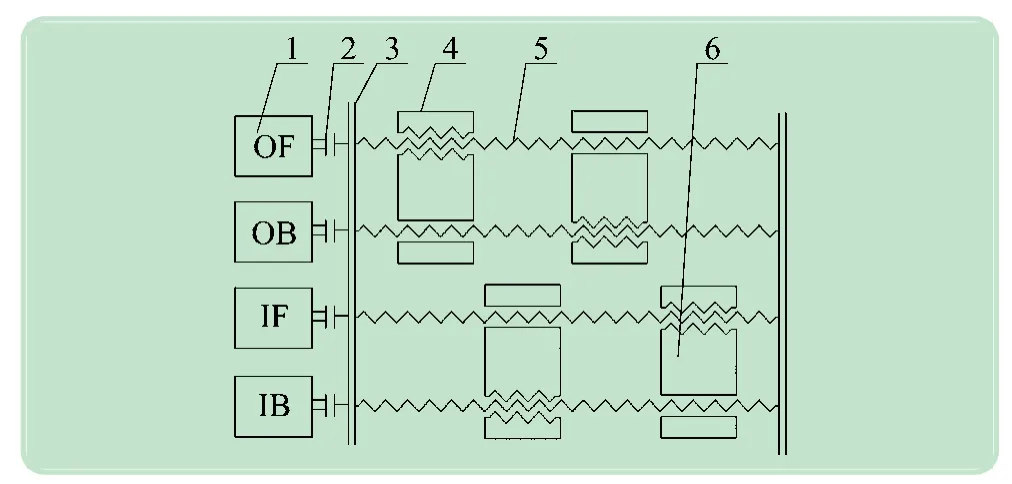
圖2 爬壁機器人傳動機構示意圖
本機構采用并聯方式,腿部結構分布在本體框架兩側,絲杠一端與電機組連接;另一端與本體框架連接。前、后滑塊中一組對角孔設有螺紋,與絲杠形成螺旋副并起傳動作用;另一組設為通孔,與絲杠形成移動副。
1.3 整體結構設計
虛擬樣機模型是驗證設計可行性的重要環節,使用SolidWorks軟件設計各部件模型,并完成機器人模型的裝配。新型足式爬壁機器人整體結構如圖3 所示,機器人本體框架長410 mm,寬265 mm,腿部結構伸縮范圍95~140 mm。
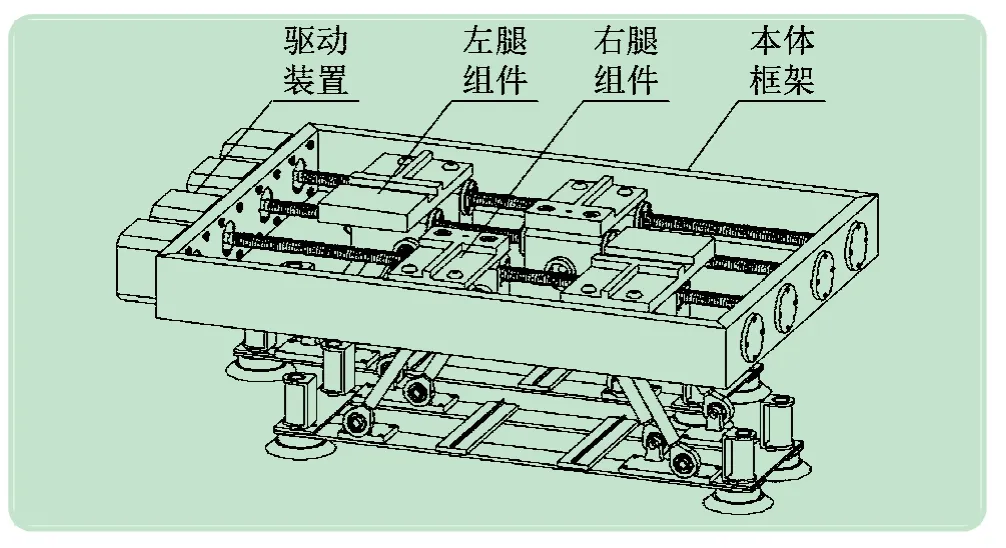
圖3 足式爬壁機器人整體結構
機器人整體結構采用鋁合金材料,既降低自重,又滿足剛性要求。底板和連接板其中一表面加工為帶棱,即提高足部剛性和穩定性,又不易發生變形。左右兩腿部結構設計成對稱結構,便于安裝和步態規劃,且運動原理相同。通過驅動裝置調節轉速改變前、后滑塊間的距離,調整邁步間距和高度,實現機器人抬腿與落腿動作。當兩滑塊間距離增大時,足部落腳吸附在壁面上;兩滑塊距離減小時,足部抬起向前移動。兩足依次交替吸附在壁面上行走,類似人走路運動,具有良好的直線運動和越障能力。
2 穩定性分析
首先建立穩定平面,當機器人重心投影到穩定平面時,處于穩定狀態,可能會沿壁面滑動;相反,重心落在穩定平面外時,可能會壁面滑動,也可能發生傾覆[10-11]。如圖4 所示,底座在豎直方向的投影面α 為該狀態的穩定平面。如果機器人繞一點發生傾覆,則角θ為機器人重心與該點連線與機器人底座平面的夾角。其中,β 為機器人足底平面與豎直方向的夾角。當機器人重心G的投影點落在α 內時,即θ≤β,機器人處于穩定狀態;當機器人重心G落在α外時,即θ >β,機器人處于非穩定狀態。
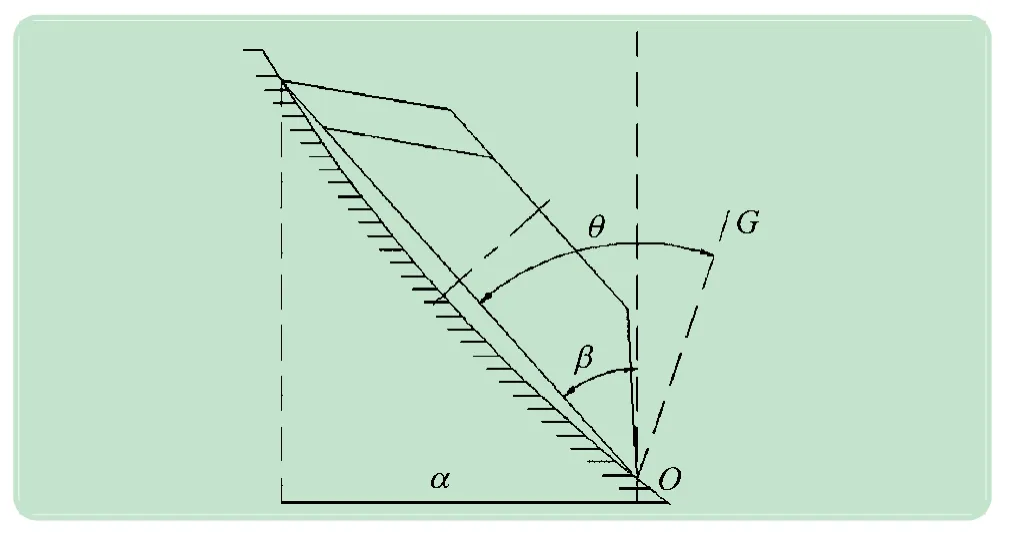
圖4 機器人穩定平面
爬壁機器人在壁面上不同位置的曲率發生變化,其位姿也在變化,機器人的穩定平面也在不斷變化。機器人隨時可能由穩定狀態進入非穩定狀態。處于穩定狀態時,僅考慮合外力的平衡,磁力平衡自身重力產生沿壁面的下滑力和壁面對機器人的支持力;處于非穩定狀態時,既要考慮機器人所受的合外力,也要考慮合外力矩,故磁力需要平衡下滑力、持力和平衡傾覆力矩。
3 受力分析
3.1 抗滑落分析
為避免機器人在壁面上下滑動,要求吸附裝置與壁面間的靜摩擦力足夠大,最大靜摩擦力取決于支持力,支持力又取決于吸附力[12-13]。故合理規劃機器人所有位姿所需吸附力、靜摩擦力平衡機器人的下滑力。機器人在壁面作業時,設自身的傾角為α,水平面上傾角為0,分為兩種情況:①在壁面上方運動,有(0°≤α≤90°);②在壁面下方運動,有(90° <α≤180°)。
3.1.1 壁面上方運動
機器人在壁面上方運動時(0°≤α≤90°),對其任意時刻進行受力分析,如圖5 所示。
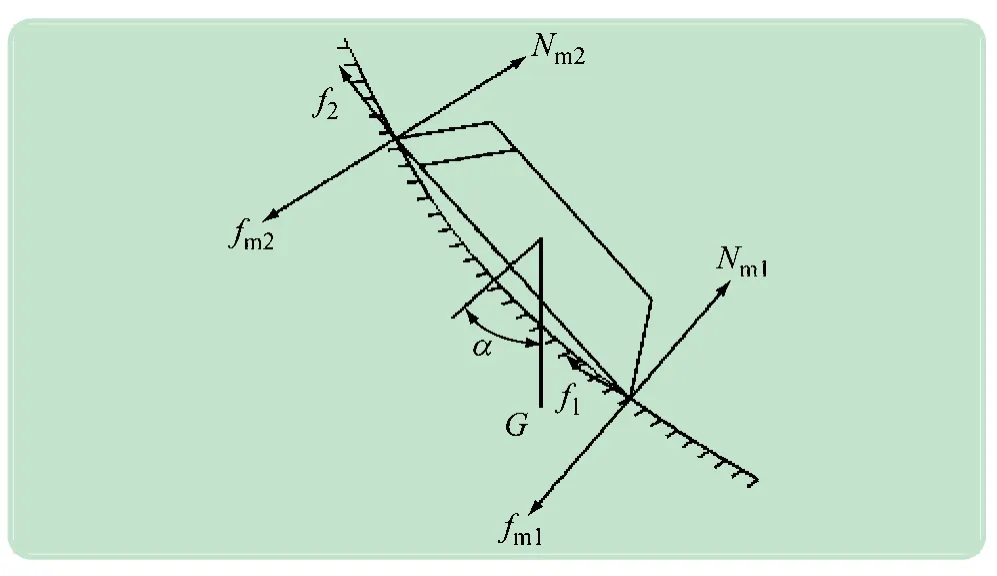
圖5 機器人在上壁面工作受力分析
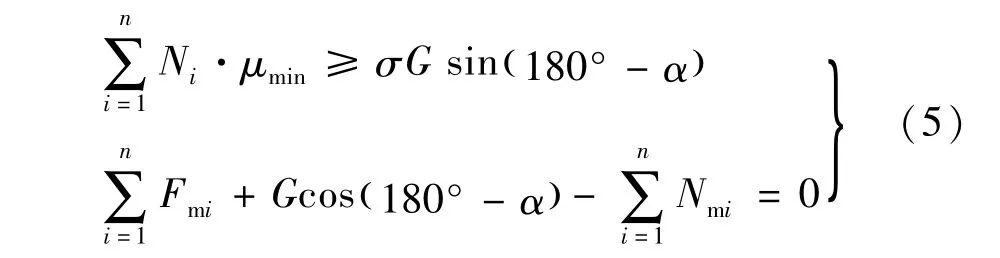
機器人不發生滑落的條件是,足部吸附單元與壁面間的最大靜摩擦力大于自身重力沿壁面的向下分量。取吸附單元與壁面間摩擦因數的最小值,平衡方程為:
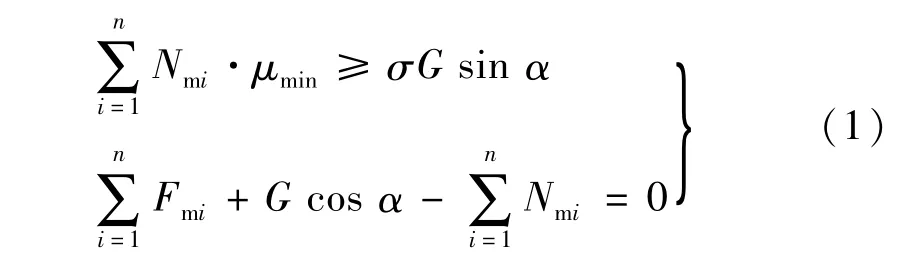
式中:G為爬壁機器人本體質量,G=150 N;Nm為作業面對單個磁鐵的支持力;σ為安全系數,σ=2;Fm為單個磁鐵與壁面間的吸附力;n為磁鐵的個數,n=4;μmin為磁鐵與壁面之間的最小摩擦系數,μmin=0.1;α為機器人在壁面工作時的傾斜角度。
作業表面是不完全平整且存在曲率,故需要對作業平面進行簡化,取Fmi與豎直方向的夾角為α,整理可得:

解得:

故單個吸附單元所需的吸附力為

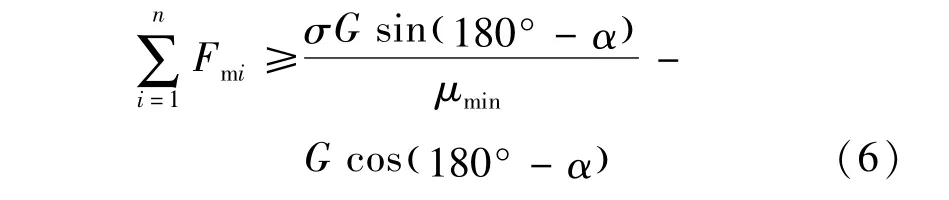
通過MATALB進行繪圖,得到機器人在上壁面運動時,單個吸附單元所需的吸附力與機器人傾斜角α間的關系如圖6 所示。
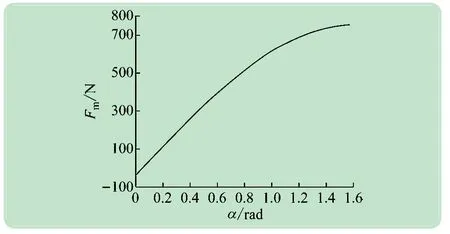
圖6 單個吸附單元所需吸附力與傾斜角度間的關系
隨著工作壁面傾斜角度的增大,機器人所需的吸附力逐漸增大,使最大靜摩擦力抵消重力產生的下滑力。當機器人傾斜角度達到90°時,此時所需吸附力最大Fm=750 N。
3.1.2 壁面下方運動
爬壁機器人在壁面下方運動時(90° <α≤180°),對其任意時刻進行受力分析,如圖7 所示。
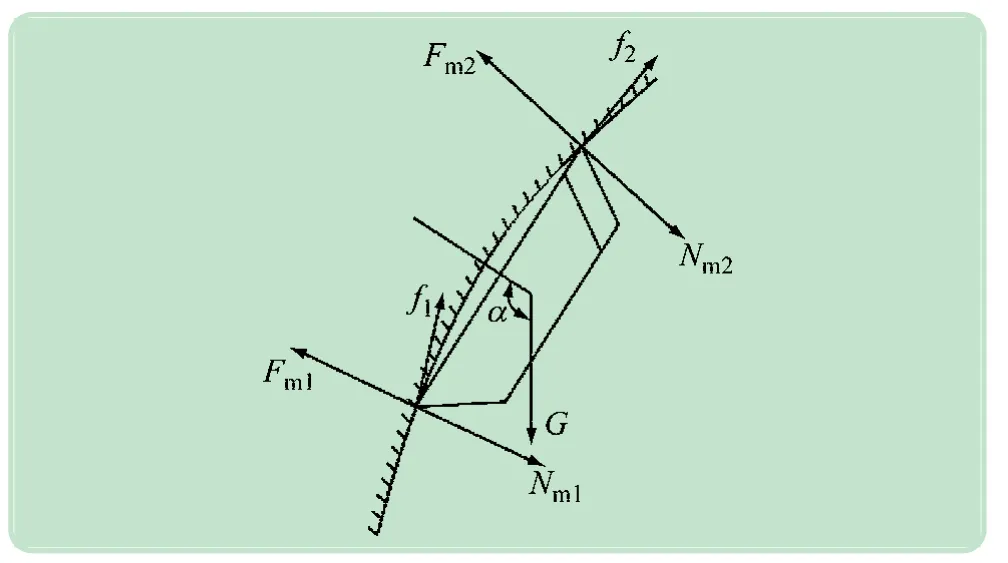
圖7 機器人在下壁面工作受力分析
平衡方程為
整理得
故單個吸附單元所需的吸附為

當機器人在下壁面運動時,單個吸附單元所需吸附力與壁面傾角α間的變化如圖8 所示。
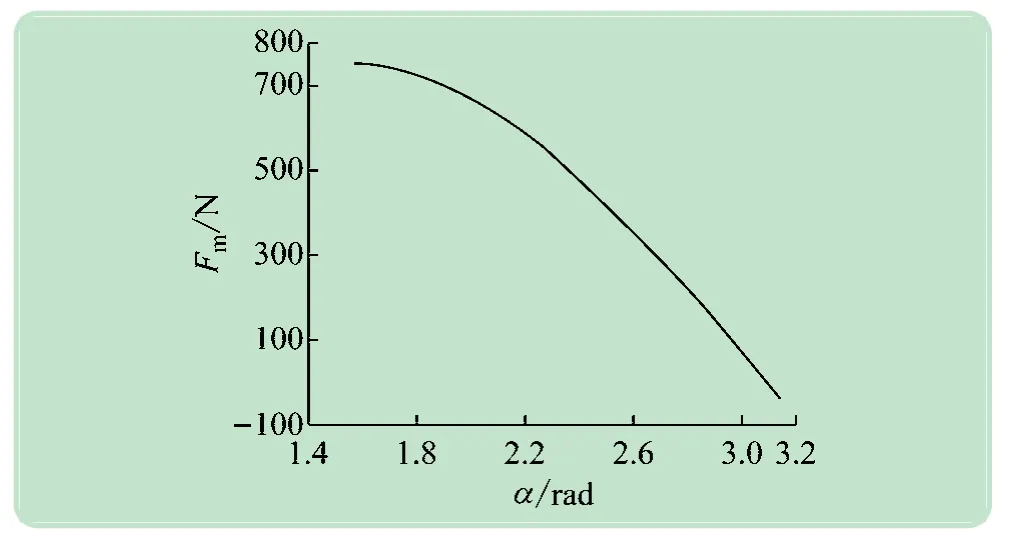
圖8 機器人下壁面運動時單個吸附單元所需吸附力與α關系
隨著工作壁面傾角的不斷增大,吸附單元所需吸附力減小。當α=90°時,所需吸附力達到最大臨界值Fm=750 N。因此,無論機器人處于任何位姿時,單個吸附單元與壁面間的吸附力大于臨界值(750 N),保證機器人不會發生滑落。
3.2 抗傾覆分析
機器人重力分解為沿壁面向下和垂直壁面向下的兩個分量[13-14]。在上壁面作業時,重心隨著壁面的傾斜程度增加發生失穩狀態,垂直壁面的分量產生抗傾覆力矩;在下壁面作業時,兩個分量全部產生傾覆力矩。以機器人在下壁面作業為例,對其進行抗傾覆分析。
3.2.1 向前、向后傾覆分析
發生傾覆的位置可能為足部前端或后端的一邊,近處的吸附單元產生的抗傾覆力矩為零,遠處的吸附單元產生抗傾覆力矩。根據力矩平衡條件∑M0=0,得平衡方程:

式中:Fm為單個吸附單元壁面之間的吸附力;Nm為壁面對單個吸附單元的支持力;H為重心與壁面間的距離,H=173.20 mm;L1為機器人本體框架的長度,L1=400 mm。
取Nm=0 的臨界條件,得:
已知兩個投影的吸附單元為O′點,則單個吸附單元的吸附力應滿足:
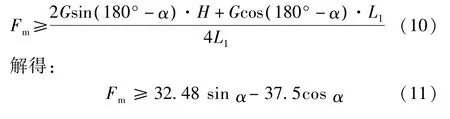
機器人在下壁面運動(90°≤α≤180°),且不發生向前或向后傾覆時,單個吸附單元所需吸附力Fm隨傾角α的變化如圖9 所示。圖中,α=122°時,吸附單元所需吸附力達到臨界值Fm=49.61 N,故吸附力Fm>49.61 N。
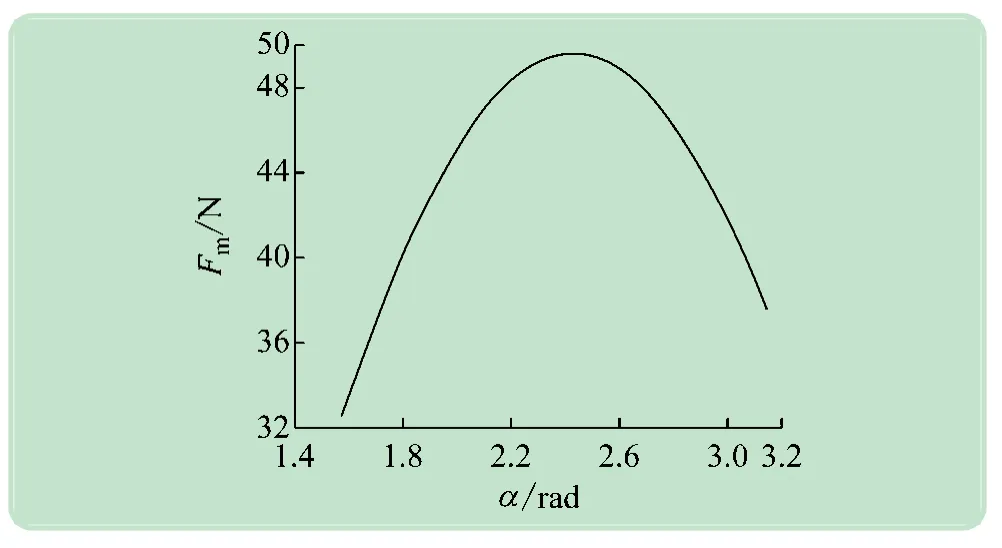
圖9 單個吸附單元的吸附力隨α關系
3.2.2 向左、向右傾覆分析
發生傾覆的位置可能是機器人足底左端或右端的一邊,遠端的吸附單元產生抗傾覆力矩[15]。得平衡方程:

式中:L2為機器人本體框架的寬度,L2=300 mm。取Nm=0 的臨界條件,并帶入數值,得到單個吸附單元的吸附力為

機器人在下壁面運動(90°≤α≤180°),且不發生向左或向右的傾覆時,單個吸附單元所需吸附力Fm隨傾斜角度α的變化如圖10 所示。
圖10 單個吸附單元的吸附力隨α關系
圖中,α=130°時,所需的吸附力達到臨界值Fm=57.28 N。為避免爬壁機器人發生向左或向右傾覆,其足部單個吸附單元所需的最小吸附力為57.28 N,故吸附力Fm≥57.28 N。
機器人發生滑落對單個吸附單元的吸附力為750 N,遠大于發生傾覆的單個吸附單元吸附力57.28 N。所以,機器人在作業壁面易發生滑落,故對單個吸附單元設定時,以發生滑落的臨界條件為依據。由于作業壁面環境復雜多變,提高爬壁機器人作業穩定性,增加單個吸附單元與壁面間的磁吸附力為1.5 倍,故Fm=1 125 N。
4 試 驗
通過SOLIDWORKS 軟件建立新型足式爬壁機器人三維模型,進而搭建爬壁機器人樣機模型,進行實驗驗證機器人設計的合理性及可行性。機器人運動示意圖如圖10 所示,每兩幅圖分別為機器人的正面和側面,能夠更加清晰地表達機器人的運動過程。進行本體框架做腿部的相對運動,回到圖(a)所示位置為運動結束。
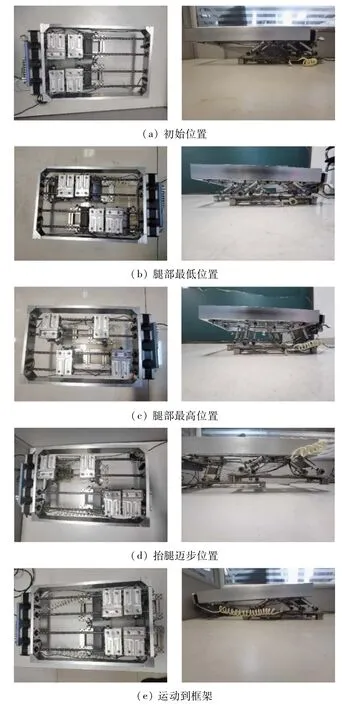
圖11 機器人運動圖
實驗結果表明,該機構能夠實驗預期的越障功能,可以根據障礙物調節抬腿高度和邁步間距。此外,該機構具有良好的直線運動,滿足大型壁面的作業要求。
5 結語
本文提出了一種新型足式爬壁機器人結構,由行走機構、吸附裝置和傳動機構組成。該機器人有良好的直線運動、較好的步態規劃和較強的越障能力。通過對吸附裝置進行受力分析,滿足機器人所需吸附力的要求,保證機器人在壁面上不存在滑動和傾覆的風險。通過實驗驗證了機器人本體結構設計的合理性及腿部結構的可行性,且本體框架與壁面始終保持平行。證明該爬壁機器人有能力在垂直壁面上攀爬。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08