氣動(dòng)機(jī)械手穩(wěn)定運(yùn)動(dòng)的控制策略綜述
2021-12-16 06:14:56陶鑫瑞高春艷
液壓與氣動(dòng) 2021年12期
陶鑫瑞,高春艷,陳 璇,潘 政
(1.河北工業(yè)大學(xué) 機(jī)械工程學(xué)院,天津 300401;2.河北工業(yè)大學(xué) 電氣工程學(xué)院,天津 300132)
引言
近年,氣動(dòng)技術(shù)的應(yīng)用領(lǐng)域迅速拓寬,尤其是在食品加工及包裝[1]、自動(dòng)上下料[2-3]、自動(dòng)化沖壓生產(chǎn)線(xiàn)[4]、高頻淬火[5]等自動(dòng)化生產(chǎn)線(xiàn)上,主要依靠PLC控制技術(shù)與氣動(dòng)技術(shù)的結(jié)合來(lái)提高系統(tǒng)的自動(dòng)化程度,使控制方式更加靈活[6-8]。氣動(dòng)機(jī)械手以及柔性自動(dòng)化生產(chǎn)線(xiàn)的作業(yè)對(duì)象環(huán)境正朝著非結(jié)構(gòu)化方向拓展[9],具有越來(lái)越強(qiáng)的不確定性,對(duì)氣動(dòng)機(jī)械手的運(yùn)動(dòng)穩(wěn)定性提出了更高的要求。穩(wěn)定性控制關(guān)系到生產(chǎn)節(jié)奏、安全、維護(hù)和成本等一系列問(wèn)題,如氣動(dòng)焊接機(jī)械手的不穩(wěn)定會(huì)嚴(yán)重影響焊接質(zhì)量[10],在電器裝配生產(chǎn)線(xiàn)上氣動(dòng)機(jī)械手的不穩(wěn)定可能導(dǎo)致產(chǎn)品不能正常使用。因而,研究氣動(dòng)機(jī)械手的穩(wěn)定運(yùn)動(dòng)控制方法是推動(dòng)其應(yīng)用發(fā)展的關(guān)鍵環(huán)節(jié)。
1 氣動(dòng)機(jī)械手運(yùn)動(dòng)控制的難點(diǎn)
如圖1所示,機(jī)械手已經(jīng)逐漸進(jìn)入社會(huì)生活的諸多領(lǐng)域,從汽車(chē)制造業(yè)[11]、金屬加工業(yè)[12],到家政服務(wù)、農(nóng)業(yè)工業(yè)化、助老助殘等方向[13],都有較為成熟的應(yīng)用,表現(xiàn)出良好的性能,尤其近年來(lái)在人機(jī)協(xié)作以及仿生機(jī)器人方向,氣動(dòng)機(jī)械手有著較大的優(yōu)勢(shì),如強(qiáng)度高,可獲得更高的功率-重量比,高安全性等,因而得到更多關(guān)注。
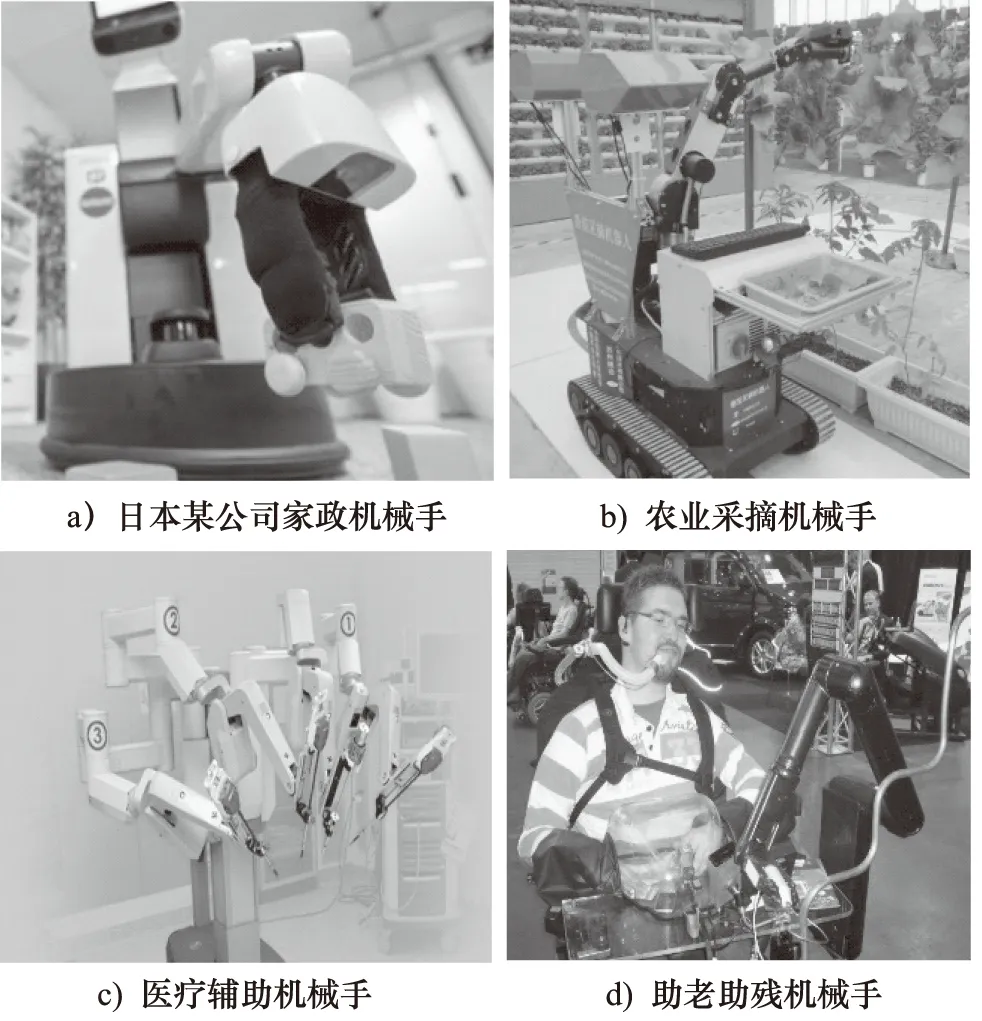
圖1 新熱點(diǎn)下的各種機(jī)械手
但是,由于氣壓傳動(dòng)技術(shù)本身固有的高度非線(xiàn)性特征和空氣可壓縮性都對(duì)實(shí)現(xiàn)高性能的跟蹤控制帶來(lái)了許多困難[14],時(shí)間變化、順應(yīng)性、高滯后性、缺乏阻尼能力等問(wèn)題,導(dǎo)致難以對(duì)其行為準(zhǔn)確建模以及設(shè)計(jì)具有高性能定位的控制器[15-16],使得氣動(dòng)系統(tǒng)的控制精度、響應(yīng)速度和穩(wěn)定性難以達(dá)到理想效果。非線(xiàn)性的問(wèn)題使氣動(dòng)機(jī)械手的運(yùn)動(dòng)存在許多不確定性,從而難以獲得精確的數(shù)學(xué)模型,導(dǎo)致運(yùn)動(dòng)穩(wěn)定性和精度較差[17]。基于這些問(wèn)題背景,國(guó)內(nèi)外越來(lái)越多的科研院所和研究人員投入到解決氣動(dòng)機(jī)械手的穩(wěn)定運(yùn)動(dòng)問(wèn)題的方法研究中去。
2 基于模糊控制的控制策略
針對(duì)氣動(dòng)機(jī)械手難以建立準(zhǔn)確的數(shù)學(xué)模型的問(wèn)題,不少研究學(xué)者提出基于模糊控制的控制策略。模糊控制是基于控制經(jīng)驗(yàn)或相關(guān)專(zhuān)家的知識(shí)儲(chǔ)備,因此在設(shè)計(jì)中不必建立精確的被控對(duì)象數(shù)學(xué)模型[18-20],適用于解決氣動(dòng)機(jī)械手的非線(xiàn)性控制,模糊控制的基本原理如圖2所示。
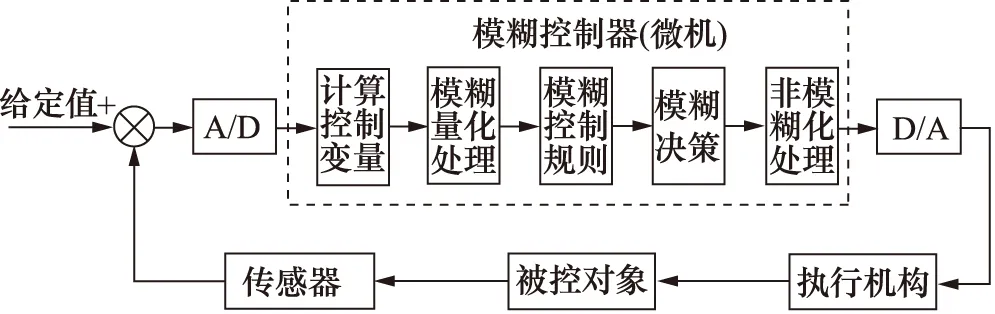
圖2 模糊控制原理框圖
2.1 模糊自整定PID控制
常規(guī)PID控制算法如圖3所示,存在參數(shù)不能在線(xiàn)調(diào)整、恢復(fù)穩(wěn)定狀態(tài)慢、積分飽和現(xiàn)象等缺點(diǎn),針對(duì)這些缺陷,研究者將模糊控制與常規(guī)PID控制結(jié)合,實(shí)現(xiàn)對(duì)參數(shù)KP,KI,KD的在線(xiàn)調(diào)整。
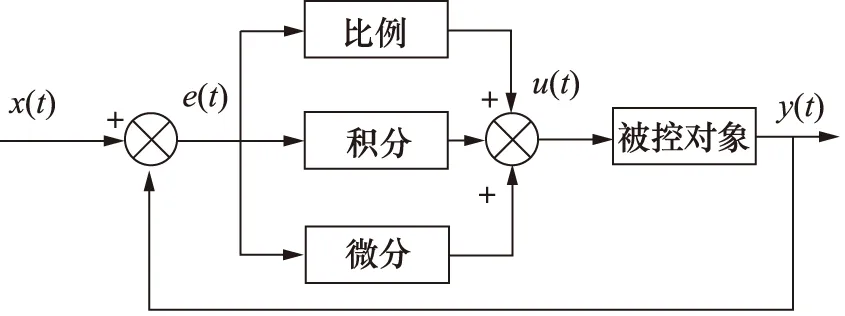
圖3 傳統(tǒng)PID控制原理圖
潘廣香等[21]針對(duì)透明紙快換系統(tǒng)氣動(dòng)機(jī)械手存在的控制精度不高和穩(wěn)定性差的問(wèn)題,設(shè)計(jì)出如圖4所示的模糊自整定PID控制器。當(dāng)系統(tǒng)狀態(tài)或參數(shù)發(fā)生變化時(shí),計(jì)算機(jī)會(huì)實(shí)時(shí)檢測(cè)和計(jì)算系統(tǒng)誤差e和誤差變化率de/dt,應(yīng)用模糊合成推理設(shè)計(jì)PID參數(shù)的模糊矩陣表,查出修正參數(shù)代入下式計(jì)算:
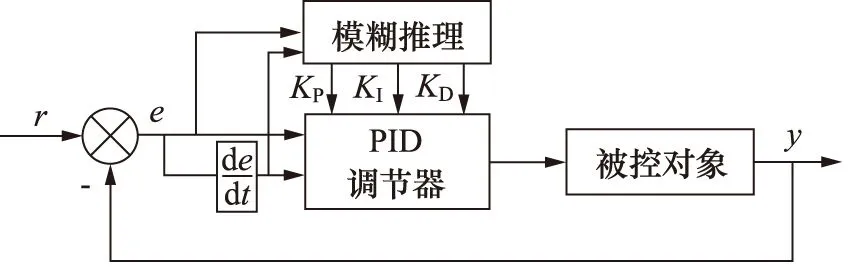
圖4 模糊PID控制結(jié)構(gòu)
(1)

在線(xiàn)運(yùn)行過(guò)程中,控制系統(tǒng)通過(guò)對(duì)模糊邏輯規(guī)則的結(jié)果處理、查表和運(yùn)算,完成對(duì)PID 參數(shù)的在線(xiàn)自校正。
王偉偉等[22]建立了基于比例閥控缸的氣動(dòng)伺服系統(tǒng)并以氣缸的柔性定位為研究對(duì)象,分別用經(jīng)典PID控制和模糊自整定PID控制設(shè)定控制器,實(shí)驗(yàn)結(jié)果表明,模糊自整定PID控制的誤差是經(jīng)典PID控制的1/4,且具有更好的響應(yīng)速度和魯棒性。因而,對(duì)于作業(yè)有一定運(yùn)動(dòng)精度要求的氣動(dòng)機(jī)械手,優(yōu)先選用模糊自整定PID控制。鞠鵬程等[23]利用模糊PID控制策略對(duì)氣動(dòng)機(jī)械手位置伺服控制器進(jìn)行設(shè)計(jì)并實(shí)現(xiàn)在線(xiàn)參數(shù)自整定,能有效地實(shí)現(xiàn)氣動(dòng)機(jī)械手的定點(diǎn)控制。DU M等[24]研發(fā)的應(yīng)用于圖書(shū)館自動(dòng)取、放機(jī)器人,也是采用模糊自整定PID控制,并在新加坡國(guó)立大學(xué)的圖書(shū)館使用,效果良好,為實(shí)現(xiàn)無(wú)人圖書(shū)館奠定了基礎(chǔ)。
還有一些學(xué)者根據(jù)實(shí)際需求,對(duì)模糊自整定PID控制進(jìn)一步優(yōu)化。例如,程其鵬等[25]在上述控制策略的基礎(chǔ)上結(jié)合了免疫PID控制的優(yōu)點(diǎn),用模糊控制在線(xiàn)調(diào)節(jié)參數(shù)KI和KD,模糊免疫控制算法在線(xiàn)調(diào)節(jié)參數(shù)KP,結(jié)構(gòu)如圖5所示。實(shí)驗(yàn)驗(yàn)證,系統(tǒng)在超調(diào)量、響應(yīng)速度及魯棒性等方面都得到了明顯改善,并實(shí)現(xiàn)了氣動(dòng)機(jī)械手的柔性定位。
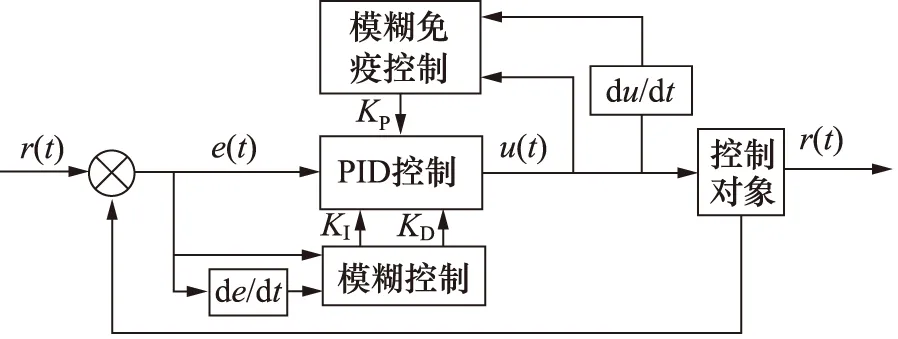
圖5 模糊自整定免疫PID控制
2.2 自適應(yīng)模糊控制
自適應(yīng)模糊控制策略即借鑒自適應(yīng)控制理論的一些思想和觀點(diǎn)來(lái)設(shè)計(jì)模糊控制器。通過(guò)在線(xiàn)或者離線(xiàn)調(diào)節(jié)模糊控制規(guī)則的結(jié)構(gòu)或參數(shù),使其盡可能處于最優(yōu)狀態(tài)。
以Lyapunov穩(wěn)定律為例,一般先定義Lyapunov函數(shù):
(2)
再結(jié)合滑模函數(shù)以及控制律得到:
(3)

引入自適應(yīng)律:
得:
(4)
為了保證系統(tǒng)穩(wěn)定,以及最大化消除逼近誤差,在控制律中引入魯棒項(xiàng)。
根據(jù)上述理論,WANG T等[26]提出的針對(duì)非線(xiàn)性擬人手臂系統(tǒng)的自適應(yīng)模糊控制方法更能保證運(yùn)動(dòng)過(guò)程中的穩(wěn)定性和適應(yīng)性,并將提出的控制方案應(yīng)用于具有高度非線(xiàn)性和模型不確定性的上肢康復(fù)氣動(dòng)機(jī)械手[27-28]和MIMO系統(tǒng)中[29-30],實(shí)驗(yàn)效果良好。ZHANG X等[31]提出了一種將內(nèi)模控制與模糊控制相結(jié)合的模糊自適應(yīng)內(nèi)模控制算法(FAIMC),通過(guò)T-S模糊模型辨識(shí)獲得過(guò)程的模糊模型和逆模型,并通過(guò)模糊邏輯在線(xiàn)調(diào)整濾波器參數(shù)。這兩種方法的仿真和實(shí)驗(yàn)結(jié)果表明,基于模糊控制的改進(jìn)算法能較為有效地提升氣動(dòng)機(jī)械手的穩(wěn)定性,具有良好的魯棒性和有效性。
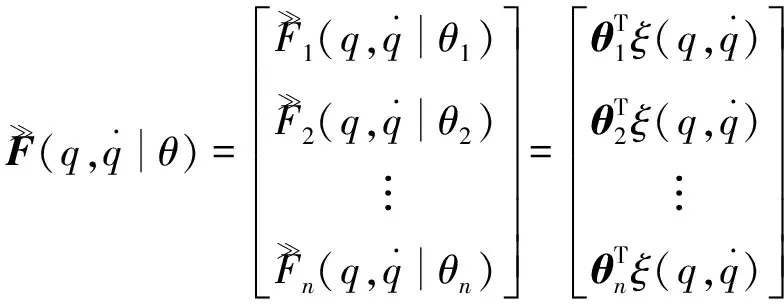
吳曉航[32]針對(duì)系統(tǒng)的非線(xiàn)性不確定項(xiàng),提出基于模糊補(bǔ)償?shù)淖赃m應(yīng)控制方法,且實(shí)驗(yàn)證明能有效消除其帶來(lái)的影響,提高機(jī)械手的控制精度。模糊系統(tǒng)設(shè)計(jì)為:
(5)
針對(duì)外加干擾,設(shè)計(jì)模糊系統(tǒng)為:
(6)
2.3 神經(jīng)模糊控制
神經(jīng)模糊控制是神經(jīng)網(wǎng)絡(luò)技術(shù)與模糊控制結(jié)合的產(chǎn)物。模糊控制在實(shí)現(xiàn)自動(dòng)生成與調(diào)整隸屬函數(shù)和模糊規(guī)則上存在困難,而人工神經(jīng)網(wǎng)絡(luò)利用大量神經(jīng)元構(gòu)成網(wǎng)絡(luò),使控制具有自適應(yīng)的學(xué)習(xí)能力、容錯(cuò)性和魯棒性,結(jié)合神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)能力來(lái)訓(xùn)練模糊規(guī)則,能有效提高氣動(dòng)系統(tǒng)的學(xué)習(xí)能力和表達(dá)能力。
陳小儉[33]分別設(shè)計(jì)了自整定PID控制器和基于人工神經(jīng)網(wǎng)絡(luò)的模糊控制器,并做了大量實(shí)驗(yàn)進(jìn)行效果比對(duì),結(jié)果表明神經(jīng)模糊控制不僅具有較強(qiáng)的魯棒性和快速響應(yīng)性,更有較高的定位精度,能滿(mǎn)足工業(yè)氣動(dòng)機(jī)械手的定位要求。
KYOUNG K A等[34]設(shè)計(jì)用于肘關(guān)節(jié)康復(fù)訓(xùn)練的兩軸氣動(dòng)機(jī)械手,在控制上使用2個(gè)模糊神經(jīng)網(wǎng)絡(luò),采用FuzzyNN1對(duì)系統(tǒng)進(jìn)行權(quán)值訓(xùn)練,而FuzzyNN2則是利用由FuzzyNN1導(dǎo)出的訓(xùn)練權(quán)值結(jié)構(gòu)來(lái)產(chǎn)生合適的控制信號(hào),其實(shí)驗(yàn)結(jié)果證明跟蹤誤差接近于0,且在不同輸入信號(hào)下都具有良好的效果。所提出的控制算法如式(7)所示:
τ=τPID+τFNN2
(7)
CHIANG C J等[35]專(zhuān)門(mén)研究了氣動(dòng)肌肉驅(qū)動(dòng)器的神經(jīng)網(wǎng)絡(luò)模糊滑模控制,控制過(guò)程中自適應(yīng)學(xué)習(xí)能力由神經(jīng)網(wǎng)絡(luò)提供,其中基于梯度下降法和反向傳播算法調(diào)整對(duì)模糊滑模控制器(FSMC)和積分器的控制增益,以最大程度地減小跟蹤誤差。
2.4 對(duì)模糊控制的評(píng)價(jià)
上述闡述是較為典型的氣動(dòng)機(jī)械手模糊控制相關(guān)的策略,從常規(guī)的PID控制算法出發(fā),結(jié)合模糊控制理論改進(jìn)為可在線(xiàn)調(diào)整KP,KI,KD的模糊自整定PID控制,再到可以在線(xiàn)或離線(xiàn)調(diào)整模糊規(guī)則的自適應(yīng)模糊控制,在控制的過(guò)程中,為了自動(dòng)生成與調(diào)整隸屬函數(shù)和模糊規(guī)則,結(jié)合人工神經(jīng)網(wǎng)絡(luò)提出神經(jīng)模糊控制。
模糊控制方法不需要?dú)鈩?dòng)機(jī)械手運(yùn)動(dòng)過(guò)程的精確數(shù)學(xué)模型[36],且魯棒性強(qiáng),適用于解決氣動(dòng)系統(tǒng)中非線(xiàn)性[37]、強(qiáng)耦合時(shí)變[38]、高滯后[39]等問(wèn)題。以實(shí)際經(jīng)驗(yàn)為基礎(chǔ),利用模糊規(guī)則對(duì)未知模型的結(jié)構(gòu)系統(tǒng)進(jìn)行控制,算法簡(jiǎn)單,實(shí)時(shí)性強(qiáng),但動(dòng)態(tài)品質(zhì)略差[40]。在實(shí)際中,往往是在模糊控制的基礎(chǔ)上結(jié)合其他自動(dòng)控制理論,使控制對(duì)象具有自適應(yīng)性,使系統(tǒng)在超調(diào)量、響應(yīng)速度及魯棒性等方面都得到改善。
3 基于神經(jīng)網(wǎng)絡(luò)的控制策略
基于神經(jīng)網(wǎng)絡(luò)的智能控制是指在控制系統(tǒng)中利用神經(jīng)網(wǎng)絡(luò)對(duì)難以精確描述的復(fù)雜非線(xiàn)性對(duì)象進(jìn)行建模,或作為控制器,或進(jìn)行計(jì)算和推理[40],基本神經(jīng)元模型如圖6所示。在氣動(dòng)機(jī)械手的控制中,神經(jīng)網(wǎng)絡(luò)模型控制器包括控制器(NNC)、神經(jīng)網(wǎng)絡(luò)模型(NNM)和氣動(dòng)伺服系統(tǒng),NNC用來(lái)計(jì)算系統(tǒng)的控制信號(hào)和調(diào)整網(wǎng)絡(luò)權(quán)值,NNM用來(lái)計(jì)算誤差。
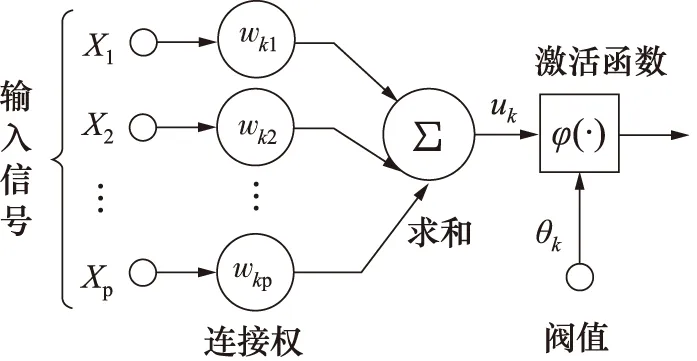
圖6 基本神經(jīng)元模型
3.1 前饋神經(jīng)網(wǎng)絡(luò)控制
基于神經(jīng)網(wǎng)絡(luò)的氣動(dòng)機(jī)械手運(yùn)動(dòng)控制策略中,現(xiàn)行最多的是前饋神經(jīng)網(wǎng)絡(luò)控制。劉興華等[41]針對(duì)平面運(yùn)動(dòng)的多段可伸長(zhǎng)氣動(dòng)軟體手臂運(yùn)動(dòng)控制,提出一種基于前饋神經(jīng)網(wǎng)絡(luò)的分層控制方法。第一層依據(jù)代價(jià)函數(shù)利用梯度下降法確定最優(yōu)姿態(tài),第二層利用神經(jīng)網(wǎng)絡(luò)來(lái)確定每段姿態(tài)所對(duì)應(yīng)的氣壓,并考慮了黏彈性的影響。神經(jīng)網(wǎng)絡(luò)自學(xué)習(xí)示意圖如圖7所示,用于求解配置空間和致動(dòng)空間之間的關(guān)系,輸入端分別為曲率k和弧長(zhǎng)l,輸出為每側(cè)氣壓pl,pr。Net*為改進(jìn)后的神經(jīng)網(wǎng)絡(luò),增加了一個(gè)姿態(tài)的曲率k′和弧長(zhǎng)l′,用于減小黏彈性引起的誤差。
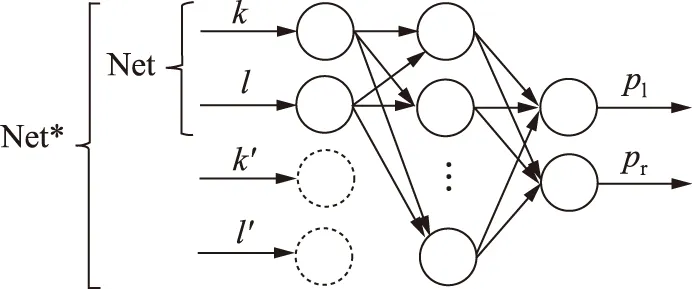
圖7 基于前饋神經(jīng)網(wǎng)絡(luò)的分層控制方法
同樣地利用分層思想,ROBINSON R M等[42]在與人互動(dòng)的機(jī)械人中開(kāi)發(fā)了3種高級(jí)分層控制策略,如圖8所示,分別為滑模控制、自適應(yīng)滑模控制和前饋神經(jīng)網(wǎng)絡(luò)控制,每種都包含不同級(jí)別的先驗(yàn)?zāi)P椭R(shí),以實(shí)現(xiàn)對(duì)平滑運(yùn)動(dòng)的精確跟蹤。
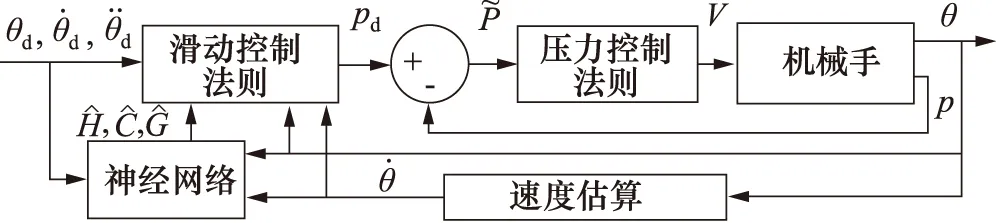
圖8 分層人工神經(jīng)網(wǎng)絡(luò)控制器
向榮[43]針對(duì)氣動(dòng)機(jī)械手運(yùn)動(dòng)過(guò)程中的抖動(dòng)問(wèn)題,通過(guò)在Lyapunov函數(shù)引入位置參數(shù)的自適應(yīng)律,實(shí)現(xiàn)較為精確的前饋補(bǔ)償,并應(yīng)用神經(jīng)網(wǎng)絡(luò)替代飽和函數(shù)實(shí)現(xiàn)跳變力矩來(lái)消除抖動(dòng)。在變結(jié)構(gòu)與前饋神經(jīng)網(wǎng)絡(luò)結(jié)合的基礎(chǔ)上加強(qiáng)系統(tǒng)自適應(yīng)能力,消除了抖振現(xiàn)象,并且系統(tǒng)的穩(wěn)態(tài)誤差沒(méi)有太大變化。
3.2 遞歸神經(jīng)網(wǎng)絡(luò)
遞歸型神經(jīng)網(wǎng)絡(luò),相對(duì)于前饋型神經(jīng)網(wǎng)絡(luò)的主要區(qū)別是存在一個(gè)或多個(gè)反饋環(huán)節(jié),另外,其神經(jīng)元常采用加性模型,使其本身就是非線(xiàn)性動(dòng)力學(xué)模型。有研究指出,單層遞歸型神經(jīng)網(wǎng)絡(luò)的映射能力就是多層前饋型神經(jīng)網(wǎng)絡(luò)的多倍。
THURUTHEL T G[44]提供了一種基于機(jī)器學(xué)習(xí)的神經(jīng)網(wǎng)絡(luò)控制方法,用于開(kāi)發(fā)軟機(jī)器人機(jī)械手的動(dòng)力學(xué)模型,并提供一種用于任務(wù)空間中氣動(dòng)機(jī)械手預(yù)測(cè)控制的軌跡優(yōu)化方法,如圖9所示。前向動(dòng)態(tài)模型使用遞歸神經(jīng)網(wǎng)絡(luò)表示,閉環(huán)策略是使用軌跡優(yōu)化和監(jiān)督學(xué)習(xí)得出的對(duì)于更復(fù)雜的動(dòng)態(tài)模型,很難開(kāi)發(fā)出能夠以所需的控制周期運(yùn)行以進(jìn)行閉環(huán)控制的MPC,在文獻(xiàn)[44-45]中得以證明。
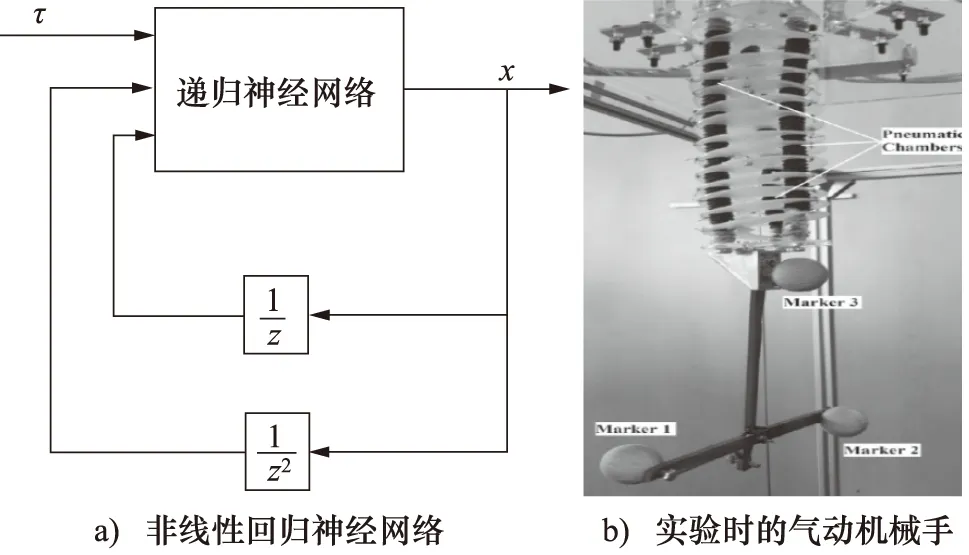
圖9 用于氣動(dòng)柔性機(jī)械手的神經(jīng)網(wǎng)絡(luò)控制
邢科新[46]設(shè)計(jì)的手功能康復(fù)機(jī)器人氣動(dòng)肌肉驅(qū)動(dòng)器,在遞歸高階神經(jīng)網(wǎng)絡(luò)的基礎(chǔ)上提出了回聲神經(jīng)網(wǎng)絡(luò)控制方法,通過(guò)大量神經(jīng)元組成的網(wǎng)絡(luò),在權(quán)值的調(diào)整下使網(wǎng)絡(luò)具有回聲狀態(tài)特性。結(jié)構(gòu)如圖10所示,虛線(xiàn)表示需要訓(xùn)練的權(quán)值。假設(shè)輸入數(shù)據(jù)、內(nèi)部單元和輸出數(shù)據(jù)的維數(shù)分別為K,N,L,所有神經(jīng)元均通過(guò)L×(K+N+L)的輸出權(quán)值矩陣Wback與輸出單元連接,即輸入到輸出節(jié)點(diǎn)以及輸出節(jié)點(diǎn)之間可能直接互連。這使得系統(tǒng)具有動(dòng)態(tài)特性和短期記憶能力。
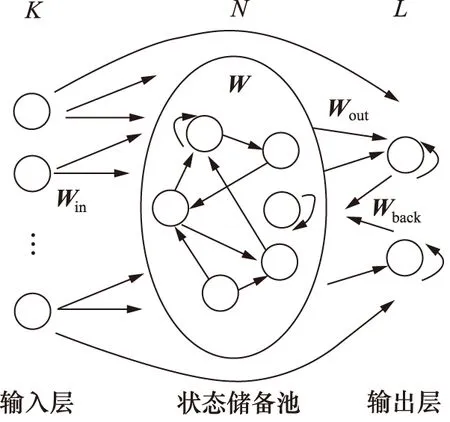
圖10 回聲神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖
王冬青等[47]針對(duì)含時(shí)滯d的氣動(dòng)人工肌肉(PAM)手臂用三層遞歸神經(jīng)網(wǎng)絡(luò)建立模型,超前d步預(yù)測(cè)PAM手臂的輸出角度,每一步都用RNN模型當(dāng)前時(shí)刻的輸出值與PAM手臂當(dāng)前時(shí)刻實(shí)際輸出值之差的平方做為RNN權(quán)值的在線(xiàn)調(diào)整準(zhǔn)則對(duì)RNN預(yù)測(cè)模型的權(quán)值進(jìn)行在線(xiàn)調(diào)整,以自適應(yīng)PAM手臂的不確定性和時(shí)變性,控制效果良好。
3.3 基于神經(jīng)網(wǎng)絡(luò)的其他研究
除了前饋神經(jīng)網(wǎng)絡(luò)控制和遞歸神經(jīng)網(wǎng)絡(luò)控制,還有一些其他基于神經(jīng)網(wǎng)絡(luò)的控制方法,整理如表1所示。
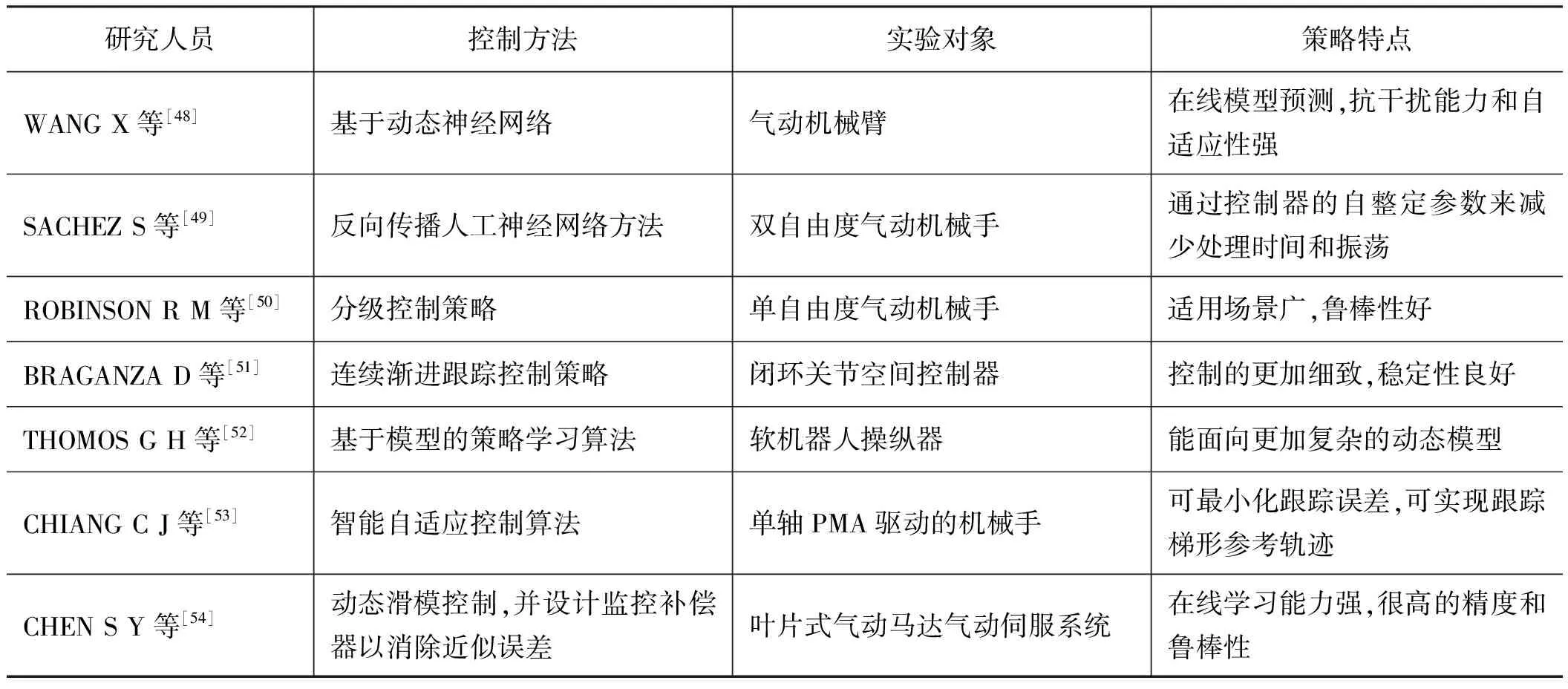
表1 基于神經(jīng)網(wǎng)絡(luò)控制的策略比對(duì)
3.4 對(duì)神經(jīng)網(wǎng)絡(luò)控制的評(píng)價(jià)
神經(jīng)網(wǎng)絡(luò)控制策略在氣動(dòng)柔性手爪的抓取作業(yè)中應(yīng)用較多,文獻(xiàn)[55-57]的研究結(jié)果可為氣動(dòng)柔性手爪的穩(wěn)定抓握控制提供重要的決策依據(jù)。其他的還有例如飛機(jī)發(fā)動(dòng)機(jī)清潔[58]、果蔬采摘[59-60]、包裝分揀[61]等實(shí)際應(yīng)用。在上述研究中,神經(jīng)網(wǎng)絡(luò)體現(xiàn)出很強(qiáng)的非線(xiàn)性擬合能力、記憶能力和自學(xué)習(xí)能力[62],可映射復(fù)雜的非線(xiàn)性關(guān)系。神經(jīng)網(wǎng)絡(luò)控制策略常常與模糊控制、動(dòng)態(tài)滑模控制等結(jié)合起來(lái),為解決復(fù)雜非線(xiàn)性、不確定性系統(tǒng)開(kāi)辟了新途徑。通過(guò)對(duì)氣動(dòng)機(jī)械手動(dòng)力學(xué)方程中未知部分的在線(xiàn)精確逼近,從而可以通過(guò)在線(xiàn)建模和前饋補(bǔ)償實(shí)現(xiàn)機(jī)械手的高精度跟蹤,但神經(jīng)網(wǎng)絡(luò)系統(tǒng)本身就是復(fù)雜的非線(xiàn)性系統(tǒng)[63],其引入進(jìn)一步增加了控制系統(tǒng)的復(fù)雜度,從應(yīng)用的角度來(lái)說(shuō),最大的缺點(diǎn)是難以保證氣動(dòng)機(jī)械手在各種工作狀態(tài)下都能具有良好的穩(wěn)定性。
4 基于魯棒控制的控制策略
魯棒控制是一種考慮不確定性的系統(tǒng)分析思想[64-65],也包含了一系列控制器設(shè)計(jì)(控制參數(shù)整定)算法,大多數(shù)魯棒控制的參數(shù)整定方法都是通過(guò)最優(yōu)控制的思想去實(shí)現(xiàn)的,魯棒控制與優(yōu)化控制二者有重疊部分,并非僅僅是包含與被包含的關(guān)系。
周云山等[66]曾用H∞理論進(jìn)行魯棒控制器的設(shè)計(jì),并應(yīng)用在擠奶氣動(dòng)機(jī)械手上。為滿(mǎn)足魯棒瞬態(tài)響應(yīng)性能,使補(bǔ)償器的設(shè)計(jì)滿(mǎn)足方程:
min‖F(xiàn)1(G,K)‖∞<1
(8)
式中,
(9)
其中,G是控制過(guò)程的名義傳遞函數(shù),K為補(bǔ)償器,γ是損失函數(shù)的系數(shù),s=(I+GK)-1為靈敏度函數(shù),w1和w3為權(quán)函數(shù)。
結(jié)果表明,外部存在擾動(dòng)時(shí),魯棒控制器能維持期望的輸出特性。
同樣應(yīng)用H∞理論,巴少男[67]以旋轉(zhuǎn)開(kāi)合式氣動(dòng)手指為研究對(duì)象,基于氣動(dòng)機(jī)械手抓取、裝配等作業(yè)對(duì)夾持力的控制精度要求,設(shè)計(jì)出一種混合靈敏度魯棒控制器。屠立等[68]對(duì)基于H∞控制器的氣動(dòng)柔性機(jī)械手進(jìn)行優(yōu)化,保證系統(tǒng)內(nèi)部有穩(wěn)定的閉環(huán),最終消除擾動(dòng)等影響。
除了H∞理論的魯棒控制,也有許多研究人員采用優(yōu)化控制方法來(lái)設(shè)計(jì)魯棒控制器。例如,TPIPATHY N S等[69]提出了一種非線(xiàn)性不確定氣動(dòng)機(jī)械手的有限時(shí)間魯棒控制方案,采用最優(yōu)控制方法來(lái)設(shè)計(jì)所提出的魯棒控制律,通過(guò)及時(shí)求解狀態(tài)相關(guān)的微分Riccati方程來(lái)生成控制輸入,在存在有限不確定性的情況下以分析和數(shù)字方式確保穩(wěn)定性。AMATO F等[70]提出了一種不確定的雙線(xiàn)性系統(tǒng)的魯棒和最優(yōu)控制策略,并將其應(yīng)用于氣動(dòng)機(jī)械臂的跟蹤控制設(shè)計(jì)中,取得良好效果。
魯棒控制也會(huì)與其他類(lèi)別的控制理論相結(jié)合,成為一種新的控制策略。例如,ZHU X等[71]結(jié)合自適應(yīng)理論提出了一種適用于由氣動(dòng)肌肉驅(qū)動(dòng)的帶有冗余DOF機(jī)械手的自適應(yīng)魯棒姿態(tài)控制器,并引入了等效的類(lèi)似平均剛度的期望約束,以實(shí)現(xiàn)精確的姿態(tài)跟蹤,同時(shí)減少由測(cè)量噪聲引起的控制輸入顫動(dòng)。CHEN Ye等[72]為單桿氣動(dòng)執(zhí)行器合成了自適應(yīng)魯棒神經(jīng)網(wǎng)絡(luò)控制器(ARNNC),結(jié)構(gòu)圖如圖11所示。該框架中,自適應(yīng)控制通過(guò)參數(shù)估計(jì)提高了動(dòng)態(tài)補(bǔ)償?shù)木龋敯艨刂茰p弱了未建模動(dòng)態(tài)和未知干擾的影響,神經(jīng)網(wǎng)絡(luò)控制更好地補(bǔ)償自適應(yīng)控制的非建模動(dòng)態(tài)、隨機(jī)干擾和估計(jì)誤差,最終實(shí)現(xiàn)了高精度的軌跡追蹤。
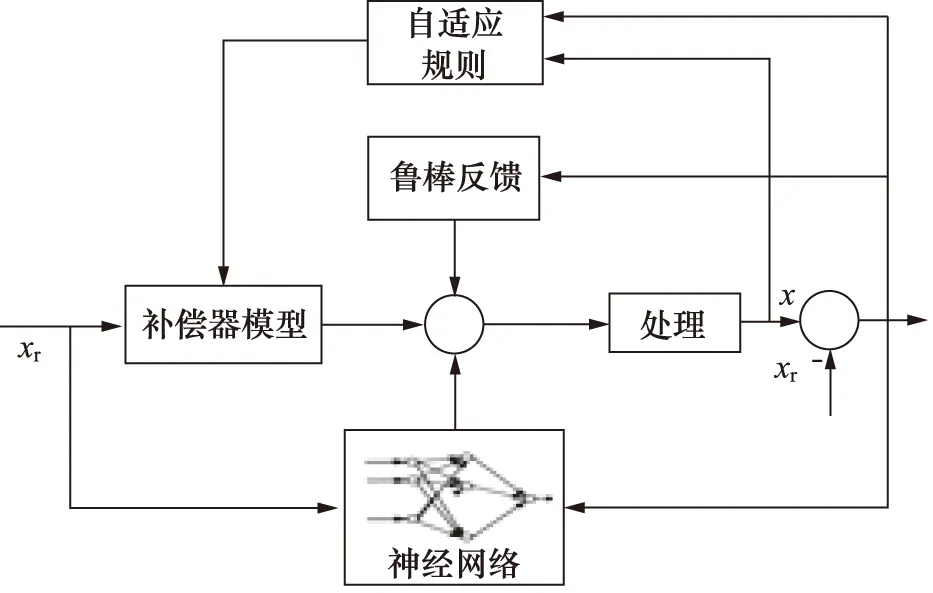
圖11 自適應(yīng)魯棒神經(jīng)網(wǎng)絡(luò)控制器結(jié)構(gòu)
5 結(jié)論
模糊控制、神經(jīng)網(wǎng)絡(luò)、優(yōu)化控制和魯棒控制是重要的智能控制技術(shù),主要應(yīng)用于解決不確定、非線(xiàn)性、復(fù)雜的自動(dòng)化問(wèn)題。氣動(dòng)機(jī)械手發(fā)展迅速,新一代氣動(dòng)機(jī)械手更是在建模、控制等方面有許多挑戰(zhàn)性問(wèn)題亟待解決[73-74]。在上述的研究成果中,模糊控制和神經(jīng)網(wǎng)絡(luò)控制是解決氣動(dòng)機(jī)械手非線(xiàn)性、滯后性等問(wèn)題的利器,并且在仿生學(xué)[75]、醫(yī)療康復(fù)輔助、搬運(yùn)與裝配[76]以及農(nóng)牧業(yè)等領(lǐng)域都有著較為成熟的應(yīng)用,結(jié)合新生的智能控制理論,可衍生出精度更高、性能更好的控制策略。相對(duì)地,在氣動(dòng)機(jī)械手運(yùn)動(dòng)控制的研究上,魯棒控制處于停滯狀態(tài),相關(guān)文獻(xiàn)年份較舊,近些年,也有一些將魯棒控制與其他控制理論結(jié)合的嘗試,在工業(yè)應(yīng)用上該控制策略使用也較少。
不難發(fā)現(xiàn),研究人員為了使氣動(dòng)機(jī)械手能夠更加穩(wěn)定運(yùn)動(dòng),會(huì)將多種控制方法各取所長(zhǎng)結(jié)合起來(lái)。在未來(lái),隨著控制技術(shù)的更一步發(fā)展,氣動(dòng)機(jī)械手的穩(wěn)定可靠運(yùn)動(dòng)控制將針對(duì)危險(xiǎn)物品處置、立面操作、復(fù)雜形貌處理加工等工程場(chǎng)景有更切實(shí)可行的應(yīng)用前景。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
