一種通用型氣動軟體夾持器的設計與分析
2021-12-16 06:14:56張耀耀徐青瑜霍前俊張遠飛
液壓與氣動 2021年12期
張耀耀,劉 勝,徐青瑜,霍前俊,張遠飛,李 旭
(上海工程技術大學 機械與汽車工程學院,上海 201620)
引言
軟體機器人是科學家模仿自然界中的軟體生物[1],如魚[2]、水母[3]、 蚯蚓[4-5]等研制出的,由楊氏模量低的柔性材料制成[6],能夠適應各種非結構化環境,具有自由度高[7]、安全性高[8]、環境適應性強[9]、柔順性好等優點。軟體機器人的運動依靠結構本身的彈性變形實現[10],能夠解決傳統機器人在人機交互和復雜環境下的安全性和靈活性問題[11]。末端軟體夾持器是軟體機器人的重要組成部分[12-13],具有柔性材料的一系列特性,相比傳統剛性夾持裝置,其結構簡單,靈活性、安全性和交互性顯著提高,在抓取過程中不會對抓取物表面造成損傷[14]。
軟體夾持器廣泛應用于農業生產、工業制造及醫療救助等領域[15],近年來,不同類型的軟體夾持器相繼被研究與開發。2011年哈佛大學GEORGE M W研究團隊研制出由硅膠制成的新型六指軟體機械手[16],通過向機械手內部通入或放出氣體使手指產生不同程度的變形,從而柔順地抓取物體,但這種夾持器很難夾持體積較小或形狀不規則物體。方海峰等[17]在2020年提出鳥喙微型氣動軟體抓手,結合軟體材料的柔順性和鳥喙結構抓取的準確性,實現對微型易碎、不規則物體的穩定抓取,但該氣動軟體夾持器對體積較大物體不適用。
目前,多數軟體夾持器功能單一,適應性差,難以實現對從大到小各種形狀、尺寸物體的通用抓取。因此,結合現有軟體夾持器的設計,通過分析形狀尺寸各異物體對軟體夾持器結構設計以及性能的要求,提出并制作一種通用型氣動軟體夾持器,基于Yeoh模型建立通用型氣動軟體夾持器變形角度與壓強關系的數學模型,通過有限元仿真軟件ABAQUS進行實驗驗證,為氣動軟體夾持器變形研究提供預測方法,為研究高適應性、高控制精度、高通用性的氣動軟體夾持器做準備。
1 通用型氣動軟體夾持器結構設計
通過分析形狀尺寸各異物體對夾持器結構設計以及性能的要求,將夾持器夾頭間隙寬度定為1 mm。超過此間隙寬度的物體,夾持器抓取過程中要先通入正壓再施加負壓,可用夾持器中間部位抓取這類體積較大目標,小于此間隙寬度的物體,抓取過程中只需施加負壓,可用尖端部位精確夾持該類細微物體。綜上,確定通用型氣動軟體夾持器總體結構設計方案,如圖1所示。
圖1結構中設計關鍵在于夾頭空腔采用由外至內錐形結構,該結構使空腔外側的彈性模量大于內側,對夾持器施加正壓時,空腔膨脹夾持器整體受力向外端彎曲變形,錐形結構還使得夾頭部尺寸收縮,尖端變形彎曲能力增強,有利于對細微物體的精確夾持。抓取較大目標時,對夾持器先施加正壓,采用錐形結構的空腔膨脹使夾持器向外彎曲變形,兩尖端像鉗子一樣張開,當張開角度稍大于被夾持目標時停止施加,再施加負壓,空腔收縮變形夾持器中間部位夾緊目標物體,尖端聚合完成抓取動作。夾持器抓取細微物體主要利用夾持器夾頭,先讓物體處于夾頭間隙處,再施加負壓,空腔收縮變形實現尖端對目標的閉合夾緊,完成整個抓取動作,通用型氣動軟體夾持器的整體結構參數見表1。
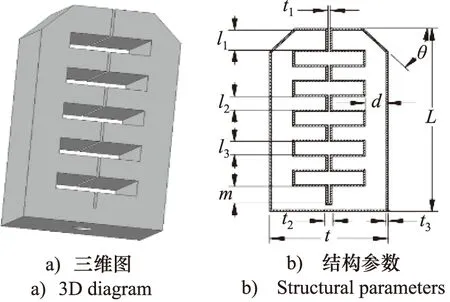
圖1 軟體夾持器結構設計Fig.1 Structural design of soft clamp
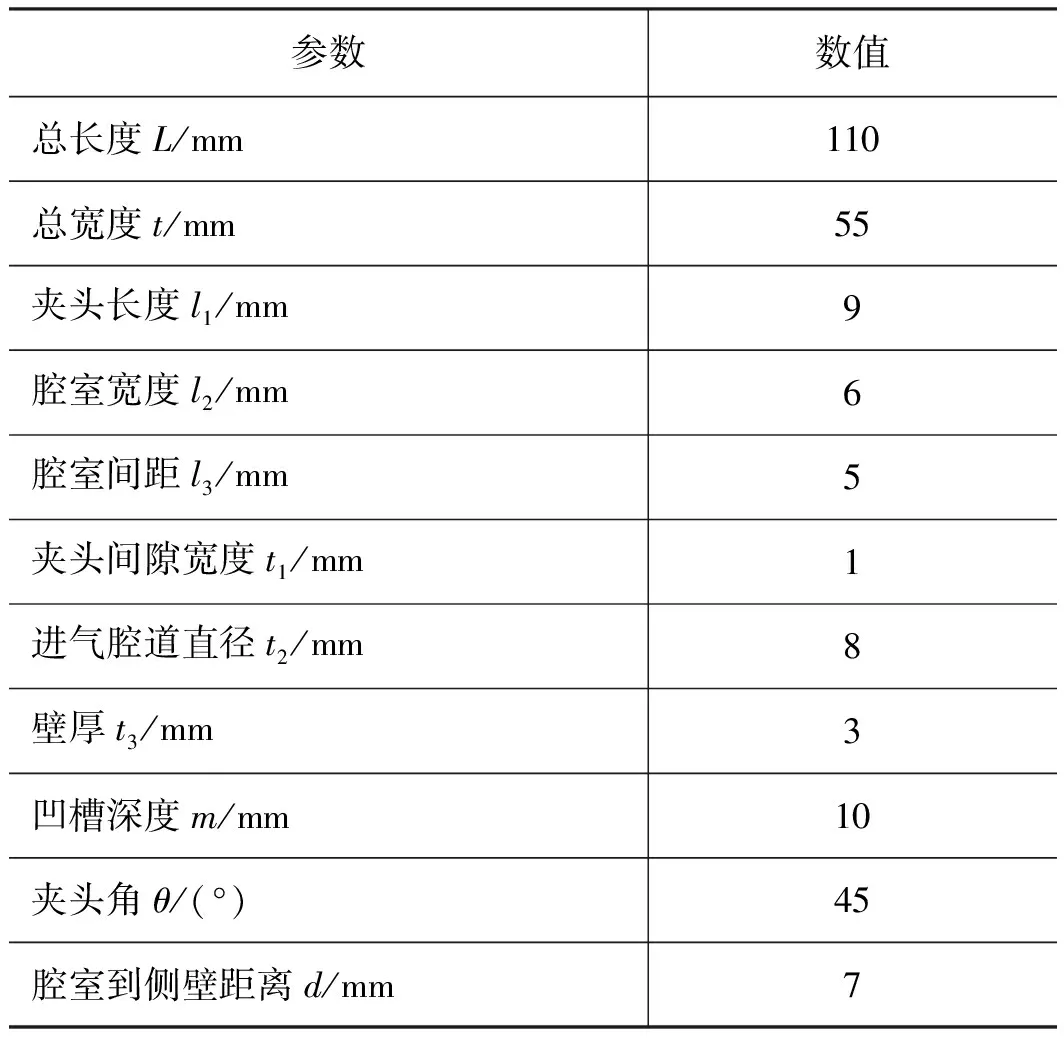
表1 軟體夾持器的結構參數Tab.1 Structural parameters of soft clamp
2 通用型氣動軟體夾持器理論數學模型
設常曲率下,夾持器在氣壓作用下的彎曲程度用其形成的圓弧對應圓心角η表示,為求出氣壓p和彎曲角度η之間的非線性關系,對其進行力學建模。夾持器為軸對稱圖形,只對一半部分建模,選取z點為觀察點,直線oz與y軸夾角記為變形角度θ,建立如圖2所示的坐標系。
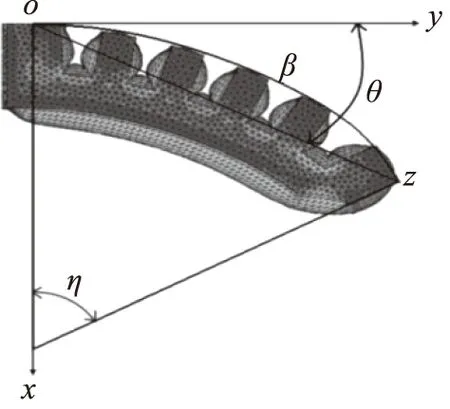
圖2 軟體夾持器彎曲示意圖Fig.2 Bend diagram of soft clamp
設硅膠材料為各向同性且不可壓縮,由應力-應變理論構建硅膠材料本構關系,依據Mooney-Rivlin模型[18],應變能密度函數(G)表示為:
G=G(I1,I2,I3)
(1)
(2)
(3)
(4)
式中,I1,I2,I3為變形張量不變量;λ1,λ2,λ3為空間3個方向的主伸長比。
由材料的不可壓縮性得:
λ3=1
(5)
設夾持器寬度方向無形變得:
I3=1
(6)
將式(5)、式(6)代入式(4)得:
(7)
將式(7)代入式(2)得:
(8)
基于Yeoh模型,用典型的二項參數形式,應變能密度函數模型為:
G=C1(I1-3)+C2(I1-3)2
(9)
式中,C1,C2為材料常數。
將式(8)代入式(9)得:
(10)
應變能密度函數對對應的主伸長比求偏導數即得對應方向所產生的應力,即:
(11)
將式(1)、式(7)、式(8)、式(10)代入式(11)中,得長度方向應力與彈性變形能的關系式為:

(12)
設夾持器彎曲變形時底部材料無變形,任一彎曲角度下的主伸長比為:
(13)
式中,β為氣腔長度。
為簡化公式,令:
K=β+t3η
(14)
將式(13)、式(14)代入式(12)得:
(15)
式(15)展開,忽略二階及以上階數,得:
(16)
充氣結束時,同一氣腔屬于同一密閉空間,設氣腔各壁的應力大小相等。設氣囊內部氣體壓力為p,對該情況進行受力分析,用σ表示底座截面內應力,由力矩平衡得:
(17)
由式(16)、式(17)得p與主伸長比λ1的關系為:
(18)
將式(18)代入式(13),即得彎曲角度η與內壓強p的關系為:
(19)
由圖2,依據幾何關系可得彎曲角度η與變形角度θ的關系為:
(20)
將式(20)代入式(19)得:
(21)
3 軟體夾持器的有限元分析和實驗
3.1 有限元分析
基于ABAQUS仿真平臺,分析通用型氣動軟體夾持器在不同氣壓下的變形。設材料參數C1=0.11,C2=0.01[19],添加固定約束和載荷,對夾持器進行正壓和負壓仿真。
1) 正壓仿真
通用型氣動軟體夾持器能承受的最大壓強及產生的最大變形決定其抓取物體的最大直徑,為得到極限氣壓和最大變形角度,對夾持器進行不同正壓的變形仿真,如圖3所示。
圖3 不同正壓下夾持器仿真和實物變形對比Fig.3 Simulation and physical deformation comparison of different positive pressure clampers
圖3是夾持器在壓力p分別為0.0025,0.0050,0.0075,0.0100,0.0125,0.0150 MPa時的仿真變形和實物變形。對比發現仿真變形和實物變形情況基本吻合,隨著壓力提高,夾持器的變形角度逐漸增大,產生的非理想變形越嚴重。壓力到達0.0150 MPa時,與夾持器的變形角度與壓力為0.0125 MPa 時相比,增幅降低,非理想變形明顯增加,將壓力p=0.0125 MPa視為極限氣壓,將此時的變形角度視為最大變形角度。
2) 負壓仿真
夾持器夾住物體后施加適當負壓決定其能抓取物體的最大重量以及能否穩定的夾持住物體,因此需要對夾持器進行負壓仿真,如圖4所示。
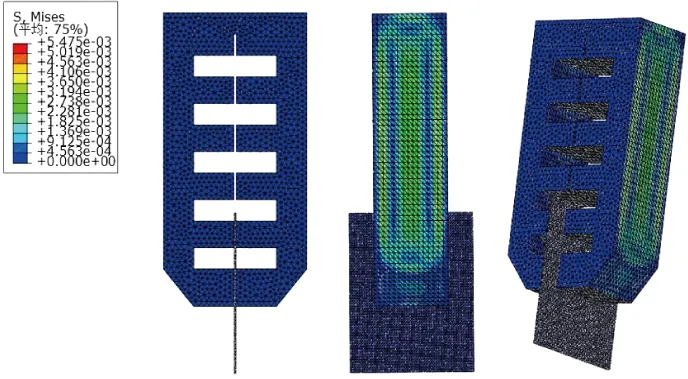
圖4 軟體夾持器負壓仿真Fig.4 Negative pressure simulation of soft clamper
圖4是p=-0.002 MPa時通用型氣動軟體夾持器抓取厚度僅為0.1 mm紙片的仿真變形情況,體現出夾持器尖端部位精確夾持細微物體的能力。
3.2 實驗研究
實驗前先用肖氏硬度為35°的硅膠制作出通用型氣動軟體夾持器,并對觀察點選取及變形角度的計算進行說明,如圖5所示。
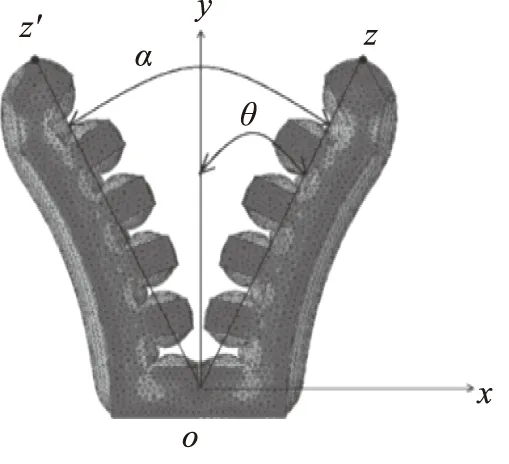
圖5 軟體夾持器變形實驗坐標系Fig.5 Experimental coordinate system of flexible clamp deformation
建立圖5坐標系,取z點為實驗觀察點,對稱點為z′,z點坐標記為(xz,yz)。直線oz與y軸夾角記為變形角度θ,直線z′o與zo夾角記為總變形角度α,α與θ的數學關系為:
α=2θ
(22)
計算變形角度θ的數學公式為:
(23)
搭建實驗裝置平臺,如圖6所示。圖6中,氣壓由微型隔膜泵(DC12V)提供,調速閥控制隔膜泵的氣體輸出,氣壓閥保證輸入氣壓穩定,PU軟管將夾持器、氣壓閥、微型隔膜泵、壓力表串聯。實驗時,調節調速閥和觀察壓力表,經網格背景板記錄夾持器不同壓力下的坐標數據,并代入式(23)中,得實驗角度θ3。
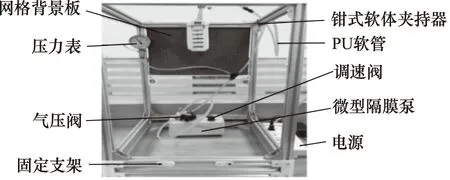
圖6 軟體夾持器實驗裝置平臺Fig.6 Soft clamper experimental device platform
3.3 實驗結果
由仿真平臺查z點在各個壓強下的坐標數據,經式(23)算出仿真角度θ1。根據已建立的通用型氣動軟體夾持器理論數學模型求出夾持器在壓強p下的彎曲變形角度,稱作預測角度θ2,預測角度θ2可由式(21)算出,結合實驗角度θ3,得表2所示數據。
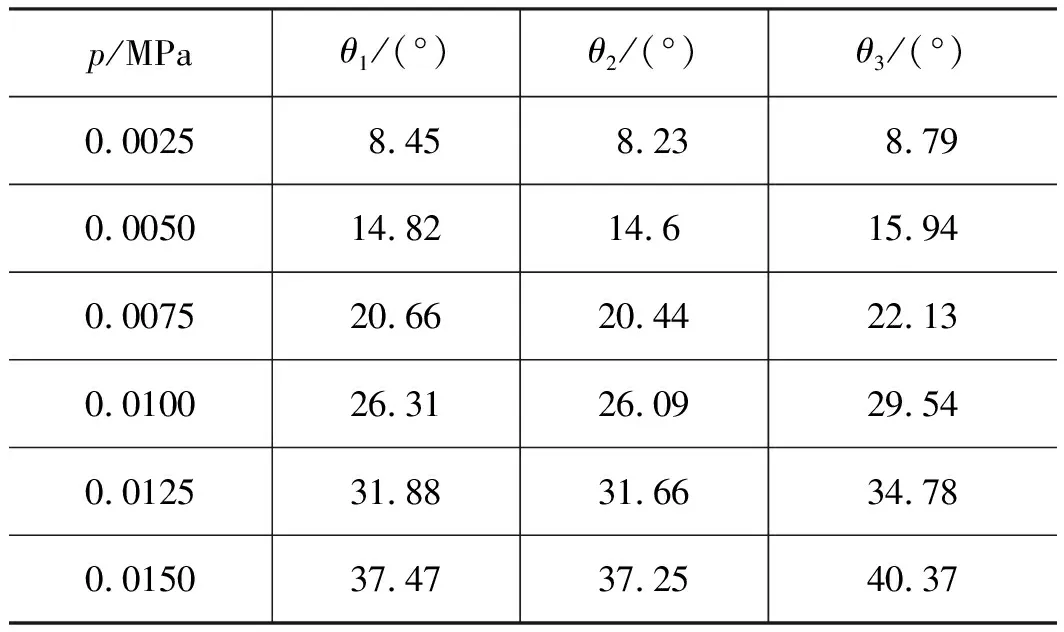
表2 不同壓強下仿真、預測、實驗角度值Tab.2 Simulation, prediction and experimental angle values under different pressures
根據表2繪制通用型氣動軟體夾持器在不同壓強下的仿真角度、預測角度、實驗角度對比圖,如圖7所示。
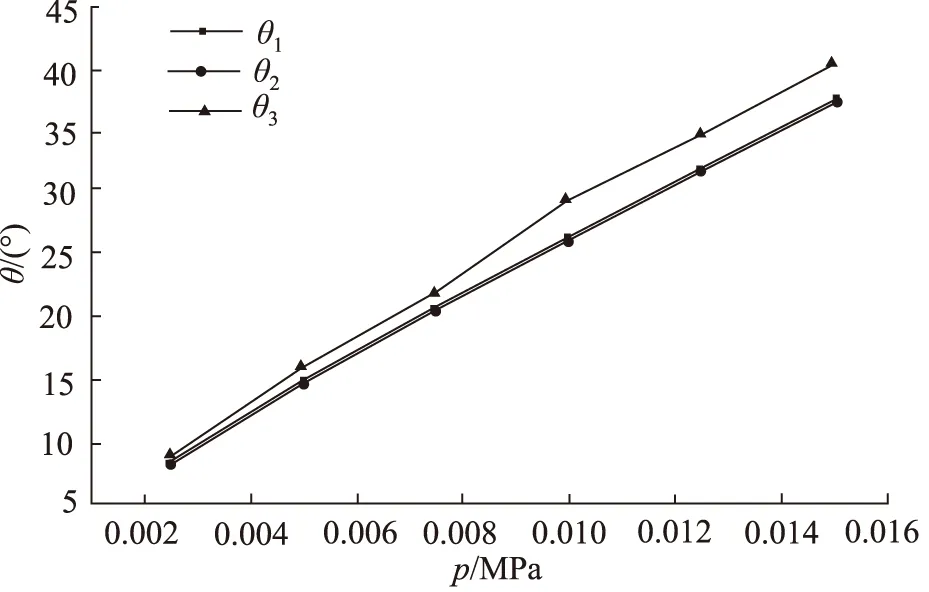
圖7 仿真、預測、實驗角度對比圖Fig.7 Simulation, prediction and experimental angle comparison diagram
從圖7中看出,仿真角度與預測角度基本一致,驗證彎曲變形理論數學模型的準確性;當夾持器內氣體壓力較小時,仿真角度與實驗角度相差較小,隨著氣體壓力變大,仿真角度與實驗角度相差逐漸增大,當達到極限氣壓時,誤差達到最大。總體上,有限元分析和實驗測試的結果誤差較小,相對誤差為9.10%,驗證了仿真結果的準確性。實驗角度值略大于預測角度值與仿真角度值,分析原因可能為:
(1) 硅膠材料參數有偏差;
(2) 實驗條件與仿真設置的邊界條件不完全一致;
(3) 忽略了重力的作用。
3.4 抓取實物能力測試
對不同形狀尺寸物體抓取的適應性,是衡量夾持器抓取性能的重要指標[19]。為驗證通用型氣動軟體夾持器的適應性,開展夾持器的抓取實驗,如圖8所示。
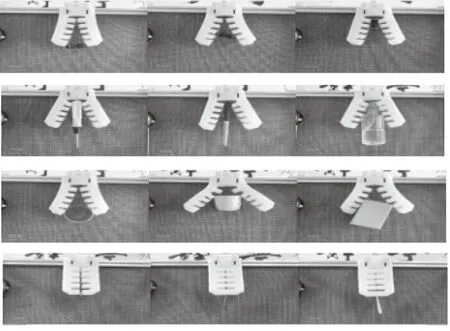
圖8 軟體夾持器適應性抓取實驗Fig.8 Adaptive grasping experiment of soft clamp
對不同形狀尺寸物體抓取的適應性,是衡量夾持器抓取性能的重要指標[20]。為驗證通用型氣動軟體夾持器的適應性,開展夾持器用不同部位抓取同一物體、抓取不同細長物體、抓取不同短粗物體、抓取不同微小物體4個實驗,如圖8所示。
4 結論
(1) 設計一種通用型氣動軟體夾持器,建立夾持器變形角度與壓力關系的數學模型;
(2) 夾持器的變形角度隨著壓力的提高而逐漸增大,當壓力達到一定值時,變形角度增幅顯著降低,非理想變形卻明顯增加,將此時的壓力視為極限氣壓。使用ABAQUS軟件對夾持器進行正壓仿真,分析夾持器的彎曲變形情況,得到極限氣壓p=0.0125 MPa;
(3) 通過夾持器的變形實驗,得到有限元分析和實驗測試結果的相對誤差為9.10%,驗證仿真的有效性和彎曲變形理論數學模型的準確性;通過抓取實物,驗證了夾持器對不同形狀尺寸物體抓取具有良好的適應性,最大變形角度69.56°,夾持最小物體直徑為0.1 mm,夾持最重物體為1 kg。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中華詩詞(2020年1期)2020-09-21 09:24:52
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
