基于PLC的AGV小車控制系統設計
2021-12-18 18:02:33胡子慧
電腦知識與技術 2021年31期
關鍵詞:多傳感器
摘要:該文圍繞無人搬運小車、以工程項目為背景,采用了模塊化的設計思路對基于西門子PLC控制器的AGV小車開展了控制系統設計。控制主要由PLC總控制,操作人員通過遙控器、狀態面板、觸摸屏來進行AGV車的操作。AGV車驅動電機的運動通過PLC進行控制,導航方式以磁導航為主,同時有激光導航可以切換。
關鍵詞:AGV小車;PLC;模塊化設計;多傳感器
中圖分類號:TP311 ? ? ? ?文獻標識碼:A
文章編號:1009-3044(2021)31-0146-02
AGV小車(Automated Guided Vehicle,簡稱AGV),是一種無人駕駛自動化搬運車輛[1-2]。AGV小車是多種技術融合的體現,具備自動導航能力、安全保護能力和移載功能等功能,涉及傳感器技術、控制技術、導航技術、機電一體化技術等領域。AGV的出現幫助實現工廠搬運自動化,是自動倉儲物流重要組成部分。
1 控制系統總控邏輯
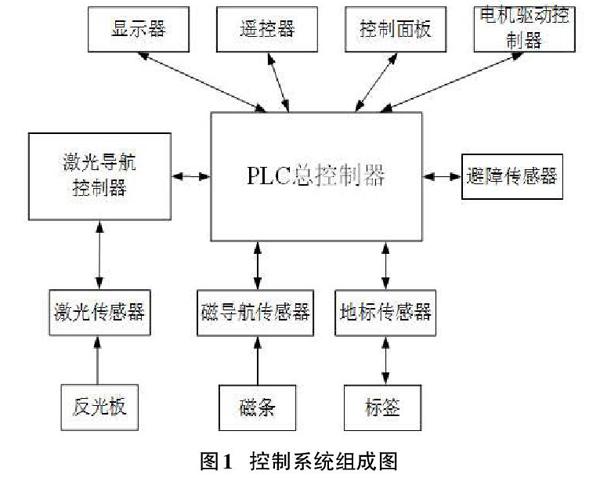
系統采用PLC為主控單元[3],將各種傳感器的輸入信號接入到PLC中,對系統進行邏輯控制[4];PLC與電機控制器通訊,實現AGV車運動;PLC接收自主導航設備信號,控制車按規定路徑運動;遙控器可實現系統的手動操作、停止等功能[5]。控制系統的組成如圖1所示。
本文設計的AGV車主要采用差速控制實現糾偏,具體實現是通過控制兩個驅動輪的速度,速度差與轉彎成比例,調整兩輪速度差就可以實現巡線糾偏。磁導航傳感器包含多個磁導航信號,根據磁信號判斷當前行駛路徑磁信號強弱,從而判斷是否偏離預定路線。當控制器判斷當前AGV的位置在預定路徑時,驅動單元按原方向繼續行駛;當控制器判斷AGV的位置與預定路徑有所偏差時,便會把偏差信息通過計算,反向推導糾偏所需速度差,根據速度差把當前所需兩輪速度參數發送給伺服驅動器,驅動器驅動伺服電機,兩輪按指定速度差速糾偏,確保AGV按照預定磁帶路徑行駛。
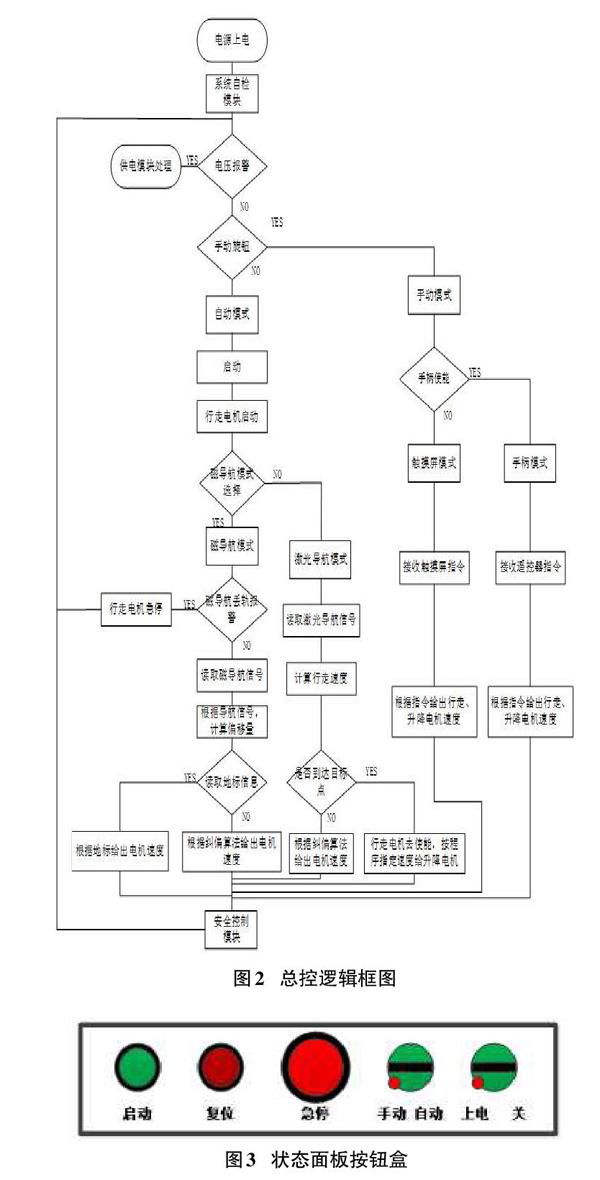
總控通過PLC梯形圖程序實現,通過合理的編程,可以實現AGV車全向移動系統的手、自動控制,具體設計思路如圖2所示。
2 控制系統通訊方式設計
(1)PLC和顯示屏間的通訊方式的選擇:PLC與觸摸屏間的通訊方式根據不同型號的觸摸屏接口不同而不一樣,西門子觸摸屏Tp700 Comfort帶有兩個工業以太網接口,與PLC之間采用profinet接口通訊。
(2)按鈕盒與PLC通訊方式的選擇:由于按鈕盒與PLC的數據的交換量很小,選用最常用也是最可靠的方式,通用硬接線。
(3)遙控器與PLC通訊方式的選擇:遙控器與PLC之間可以采用RS232、RS485、數字量、CAN總線等方式通訊。一個遙控器只有一個通信接口,只支持一種通訊方式。遙控器輸出中含有模擬量,直接I/O通訊不再適用。本項目擬采用RS232的通訊.
(4)伺服驅動器與PLC通訊方式的選擇:PLC與行走電機驅動控制器可采用RS232、RS485、CANopen等其中一種通訊。
(5)激光導航系統、磁導航傳感器、地標傳感器與PLC通訊方式的選擇:激光導航系統與PLC的通訊方式擬采用RS485、RS323串口和普通I/O通信等。
3 狀態面板設計
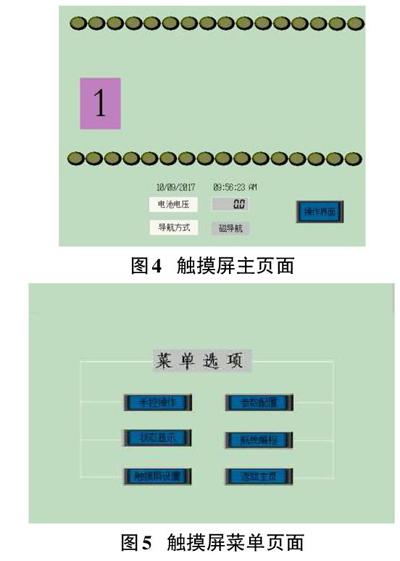
為現場操作的方便性,將在AGV車上安裝一個狀態面板按鈕盒,用于控制AGV車的啟停,手自動模式的切換。
4 人機交互界面設計
人機界面是人機交互的重要渠道,本系統的人機界面具有以下功能:
觸摸屏開機,或一段時間未操作狀態時,默認顯示主畫面,主畫面包含菜單欄和一些狀態信息。磁導航有16個磁信號,在主畫面用上下16個小泡表示兩個磁導航感應的磁信號位置及數量;電池電壓欄標示當前電池電壓,導航方式顯示當前AGV使用何種導航尋跡。同時點擊主畫面后,將會進入操作界面項目欄,在此菜單選項中,包含了此系統所有的控制選項:手控操作、參數配置、航線編程、狀態顯示、觸摸屏設置。可以進入任意一個子畫面進行相關設置。
5 特殊情形處理
在工業自控系統中,系統的安全可靠使用是放在第一位的。在安全可靠前提下,考慮現場的使用,后期維護的簡單和方便。根據現場的配置情況以及以往在AGV車定檢積累的經驗,設計在車上紅外避障傳感器、限位傳感器等傳感器。安全防護系統控制主要由PLC控制,操作人員通過遙控器、狀態面板、觸摸屏來進行操作,PLC通過接收安全防護傳感器的信號通過安全邏輯互鎖實現車的安全防護控制。通過人機界面或遙控器來實現急停、報警等設置。
6 結論
本文針對無人搬運小車系統設計進行論述,其控制系統采用西門子PLC控制器,采用CANopen通信方式,控制驅動電機和升降電機。此外,AGV導航和安全防護也由PLC完成,PLC與磁導航傳感器可采用RS485通信,本車還具有前方障礙物檢測與停車報警功能。通過顯示屏顯示小車運行速度和狀態。此系統能夠較好實現無人搬運小車的自主導航、升降、搬運、避障等功能。
參考文獻:
[1] 沈正,粱鑒如,楊明來,等.基于S7-200 SMART PLC的重載AGV控制系統設計[J].傳感器與微系統,2021,40(8):100-103.
[2] 于佳喬.AGV系統路徑規劃與任務調度研究[D].長春:長春工業大學,2021.
[3] 吳世杰.基于PLC的雙驅AGV系統設計與實現[J].南方農機,2020,51(2):143-145,148.
[4] 袁良偉,李仁玉,朱余浩,等.基于無人搬運小車的無線Mesh漫游測試自動化設計與實現[J].電子測試,2019(21):102-103.
[5] 呼玉東,文嘯,張楚,等.基于S7-1200 PLC的AGV控制系統的設計與實現[J].機床與液壓,2018,46(5):16-20,63.
【通聯編輯:代影】
收稿日期:2021-03-20
作者簡介:胡子慧(1991—),女,江西景德鎮人,教師,碩士研究生,中級職稱。
猜你喜歡
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
物聯網技術(2015年5期)2015-07-18 13:08:22
