壓電與摩擦電復(fù)合型旋轉(zhuǎn)能量采集動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制研究1)
2021-12-21 08:01:36趙林川鄒鴻翔劉豐瑞魏克湘張文明
力學(xué)學(xué)報(bào) 2021年11期
關(guān)鍵詞:系統(tǒng)
趙林川 鄒鴻翔 劉豐瑞 魏克湘 張文明,3)
* (上海交通大學(xué)機(jī)械系統(tǒng)與振動(dòng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,上海 200240)
? (湖南工程學(xué)院汽車動(dòng)力與傳動(dòng)系統(tǒng)湖南省重點(diǎn)實(shí)驗(yàn)室,湖南湘潭 411201)
引言
物聯(lián)網(wǎng)技術(shù)的蓬勃發(fā)展開啟了萬(wàn)物互聯(lián)的時(shí)代,帶領(lǐng)人類進(jìn)入一個(gè)智能化的世界,如智能可穿戴設(shè)備、智慧家居、智能工業(yè)等[1-2].物聯(lián)網(wǎng)的基礎(chǔ)是數(shù)以億萬(wàn)計(jì)的廣泛分布的智能傳感器,可以進(jìn)行信息和數(shù)據(jù)的獲取、分析、處理和傳輸[3-5].然而,如何為這些分布范圍廣、數(shù)量大的傳感器提供長(zhǎng)期有效的電能是物聯(lián)網(wǎng)技術(shù)發(fā)展的瓶頸問題之一[6-8].目前大多數(shù)傳感器采用化學(xué)電池供能,雖然電池性能也在不斷優(yōu)化,但是仍舊存在環(huán)境污染、需要定期更換維護(hù)的問題[9-11].旋轉(zhuǎn)能量是環(huán)境中最普遍存在機(jī)械能量之一.如果將旋轉(zhuǎn)能量合理轉(zhuǎn)換為電能,為物聯(lián)網(wǎng)廣泛分布的傳感器供電,是一種零碳環(huán)保、靈活便捷、可持續(xù)的供能方式[12].
旋轉(zhuǎn)能量采集技術(shù)具有能量來(lái)源廣泛、設(shè)計(jì)靈活的特點(diǎn),按照機(jī)電轉(zhuǎn)換機(jī)制分類,主要可以分為電磁式、壓電式和摩擦納米發(fā)電機(jī).電磁式旋轉(zhuǎn)能量采集器可以依靠葉片、齒輪、軸承等機(jī)構(gòu)直接采集旋轉(zhuǎn)能量,也可以利用慣性結(jié)構(gòu)將其他形式的能量轉(zhuǎn)換為旋轉(zhuǎn)能量再采集和利用[13].Cai 和Liao[14]設(shè)計(jì)了一個(gè)帶有偏心質(zhì)量的可穿戴智能手表,可以將手臂的運(yùn)動(dòng)轉(zhuǎn)換為行星齒輪相對(duì)于線圈的轉(zhuǎn)動(dòng),基于電磁感應(yīng)發(fā)電.Wang 等[15]提出了一種擺錘結(jié)構(gòu),利用其重力切向分量的周期性變化使系統(tǒng)的固有頻率與車輪的旋轉(zhuǎn)速率匹配,提高線圈與磁體的相對(duì)擺角,可以為胎壓監(jiān)測(cè)傳感器供能.Zhang 等[16]設(shè)計(jì)了一種圓形海爾貝克陣列式的電磁能量采集系統(tǒng),可以與軸承集成采集旋轉(zhuǎn)機(jī)械的能量.裝置可以在600~1000 r/min 的轉(zhuǎn)速范圍內(nèi)工作,最大電壓為4.59 V.此外,也可以通過巧妙的結(jié)構(gòu)設(shè)計(jì)利用壓電效應(yīng)直接采集旋轉(zhuǎn)能量.Zhao 等[17]設(shè)計(jì)了圓周陣列的磁耦合彎張換能器,利用旋轉(zhuǎn)磁體的磁力周期性地激勵(lì)彎張換能器中的壓電片而產(chǎn)生電能,具有高魯棒性和高可靠性.摩擦納米發(fā)電機(jī)是基于摩擦起電和靜電感應(yīng)而發(fā)電,具有材料輕便易獲取、低頻效果好,輸出電壓高等優(yōu)點(diǎn)[18-19].在旋轉(zhuǎn)能量采集中,由于兩層材料分離,可以分別固定在轉(zhuǎn)子和定子上,有利于其與轉(zhuǎn)子系統(tǒng)集成.Xie 等[20]提出了一種旋轉(zhuǎn)葉片式的摩擦納米發(fā)電機(jī),利用推桿和兩個(gè)飛輪結(jié)構(gòu)的配合將腳踏能量轉(zhuǎn)化為飛輪的高速旋轉(zhuǎn)基于獨(dú)立層模式而產(chǎn)生電能,有希望監(jiān)控司機(jī)的駕駛習(xí)慣.利用接觸分離模式和水平滑動(dòng)模式的復(fù)合,一種旋轉(zhuǎn)風(fēng)能采集系統(tǒng)被提出,并且器件可以在約15 m/s 的風(fēng)速下產(chǎn)生250 V 的開路電壓[21].為了可以更加靈活的設(shè)計(jì)和布置,可以將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為懸臂梁的振動(dòng)基于壓電效應(yīng)而發(fā)電[22].Khameneifar 等[23]將帶有末端質(zhì)量的壓電梁圓周陣列在轉(zhuǎn)子上,利用末端質(zhì)量的重力作為激勵(lì)使壓電梁產(chǎn)生形變,并研究了不同壓電材料在不同轉(zhuǎn)速下的電學(xué)輸出性能.將旋轉(zhuǎn)轉(zhuǎn)換為振動(dòng)進(jìn)行壓電能量采集雖然提高了設(shè)計(jì)靈活性,但是也帶來(lái)了新的挑戰(zhàn),比如振動(dòng)能量采集系統(tǒng)對(duì)激勵(lì)更加敏感,低頻激勵(lì)下性能較差;壓電梁在強(qiáng)激勵(lì)下可靠性較差.
盡管旋轉(zhuǎn)能量采集已經(jīng)被廣泛地研究,對(duì)于低轉(zhuǎn)速下的旋轉(zhuǎn)能量采集系統(tǒng)仍舊存在電學(xué)輸出效果差難以滿足實(shí)際應(yīng)用需求的問題[24].Zhai 等[25]采用齒輪組升頻的方式,將低速水流激勵(lì)轉(zhuǎn)化為齒輪的單向高速轉(zhuǎn)動(dòng),再通過機(jī)電轉(zhuǎn)換產(chǎn)生電能,有希望解決低頻波浪能量采集的難題.Kim 等[26]設(shè)計(jì)了海爾貝克陣列與齒輪組配合的方式,優(yōu)化磁場(chǎng)強(qiáng)度并提升頻率,可以提高低頻旋轉(zhuǎn)能量采集的功率.然而齒輪組和磁體陣列的結(jié)構(gòu)復(fù)雜,不利于其與系統(tǒng)集成和小型化.Mei 等[27]利用剛度軟化效應(yīng)設(shè)計(jì)了一個(gè)旋轉(zhuǎn)能量采集器,能夠采集轉(zhuǎn)速75~ 120 rpm 范圍內(nèi)的能量,最大電壓為4 V.Zou 等[28]提出了一種用于旋轉(zhuǎn)運(yùn)動(dòng)的磁耦合二自由度振動(dòng)能量采集器,利用剛度軟化效應(yīng)提升低速能量采集的功率.但是過低的剛度和過大的振動(dòng)位移會(huì)使懸臂梁極易損壞,工作頻域窄,可靠性差[29].
雖然這些方法在一定程度提升了旋轉(zhuǎn)能量采集系統(tǒng)的性能,但是尚未兼顧能量采集系統(tǒng)的低頻寬頻激勵(lì)的適應(yīng)性、輸出功率和可靠性.這些方法是被割裂使用的,它們之間的相互影響與協(xié)同效應(yīng)考慮很少或尚未涉及.本文提出了動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制用于提高旋轉(zhuǎn)能量采集系統(tǒng)的性能,可以使器件在低轉(zhuǎn)速激勵(lì)下(0~ 250 r/min)有效工作,增加輸出電能和提高器件可靠性.旋轉(zhuǎn)剛度軟化、非線性磁力、幾何邊界的協(xié)同調(diào)控既可以增加系統(tǒng)在低速下的振動(dòng)位移以及壓電材料的形變,也能在系統(tǒng)振動(dòng)位移過大時(shí)調(diào)控系統(tǒng)的最大位移,使其振動(dòng)可控并提高可靠性.此外,幾何邊界可以方便地集成摩擦納米發(fā)電機(jī),實(shí)現(xiàn)壓電與摩擦兩種機(jī)電轉(zhuǎn)換機(jī)制分別在振動(dòng)和碰撞過程協(xié)同發(fā)電,有效利用空間和增加輸出電能.基于哈密頓原理建立了系統(tǒng)的機(jī)電耦合動(dòng)力學(xué)模型.加工了原理樣機(jī)并在不同工況下進(jìn)行了實(shí)驗(yàn)研究,以期為能量采集系統(tǒng)動(dòng)力學(xué)和電學(xué)性能改進(jìn)提供新的途徑.
1 動(dòng)力學(xué)協(xié)同調(diào)控原理與結(jié)構(gòu)設(shè)計(jì)
1.1 動(dòng)力學(xué)協(xié)同調(diào)控原理
本文提出的動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制的工作原理如圖1 所示.首先將懸臂梁倒置安裝在旋轉(zhuǎn)盤上,即將懸臂梁的夾持端遠(yuǎn)離旋轉(zhuǎn)中心,自由端靠近旋轉(zhuǎn)中心,這種方式使得離心力與懸臂梁變形方向相同,可以使得懸臂梁在旋轉(zhuǎn)過程中產(chǎn)生剛度軟化效應(yīng),有利于懸臂梁在低速下產(chǎn)生較大形變.然而,隨著轉(zhuǎn)速升高,剛度軟化效應(yīng)更加顯著,懸臂梁的振動(dòng)位移可能過大甚至可能造成壓電梁損壞,如圖1(a)所示.因此,本設(shè)計(jì)提出了剛度軟化、非線性磁力、幾何邊界協(xié)同動(dòng)力學(xué)調(diào)控機(jī)制,如圖1(b)所示:引入了非線性磁力雙穩(wěn)態(tài)機(jī)制,進(jìn)一步降低能量采集系統(tǒng)工作頻率;在懸臂梁兩側(cè)對(duì)稱設(shè)置幾何邊界限制懸臂梁的過大位移不僅可以使系統(tǒng)振動(dòng)更加可控,還可以避免壓電梁損壞提高系統(tǒng)可靠性.此外,幾何邊界可以方便地集成摩擦納米發(fā)電機(jī),實(shí)現(xiàn)壓電與摩擦兩種機(jī)電轉(zhuǎn)換機(jī)制分別在振動(dòng)和碰撞過程協(xié)同發(fā)電,有效利用空間和增加輸出電能.同時(shí),非線性磁力也可以提高懸臂梁與邊界之間的碰撞力,有利于摩擦納米發(fā)電機(jī)的電荷轉(zhuǎn)移.壓電單元基于壓電效應(yīng)而產(chǎn)生電能;摩擦納米發(fā)電機(jī)在功能材料接觸時(shí)發(fā)生電荷轉(zhuǎn)移從而在兩側(cè)材料表面產(chǎn)生等量正負(fù)電荷,然后由于周期性接觸分離導(dǎo)致電勢(shì)差變化,基于靜電感應(yīng)在兩電極之間的外電路內(nèi)產(chǎn)生電荷流動(dòng)而發(fā)電.
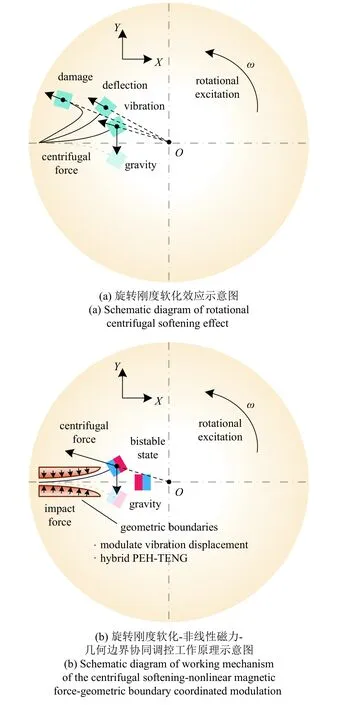
圖1 低轉(zhuǎn)速下動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制示意圖Fig.1 Schematic diagram of dynamic coordinated modulation mechanism in low rotational speed range
1.2 結(jié)構(gòu)設(shè)計(jì)
圖2 為具有動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制的旋轉(zhuǎn)能量采集器(REH-DCMM)的設(shè)計(jì)示意圖.REH-DCMM 系統(tǒng)主要由框架、懸臂梁、幾何邊界、一對(duì)相互排斥的永磁體、壓電單元PEH 和摩擦納米發(fā)電機(jī)TENG構(gòu)成.框架通過3D 打印技術(shù)將幾何邊界、懸臂梁夾持端和器件保護(hù)罩一體化成型.懸臂梁夾持端通過螺栓與框架固定,并在靠近夾持端粘貼壓電層,形成壓電單元.在懸臂梁中部區(qū)域,由內(nèi)至外分別粘貼銅電極和FEP 薄膜.幾何邊界相應(yīng)地對(duì)稱布置在懸臂梁中部區(qū)域的兩側(cè),并在兩個(gè)邊界內(nèi)側(cè)分別粘貼銅電極,形成兩個(gè)對(duì)稱的摩擦納米發(fā)電機(jī).在懸臂梁的自由端固定一塊末端永磁體,并在前端框架中部嵌入一塊靜態(tài)永磁體,兩塊磁體同名磁極相對(duì),產(chǎn)生排斥力.REH-DCMM 系統(tǒng)方便加工和裝配,也很容易地集成單元進(jìn)行陣列排布.將REH-DCMM 系統(tǒng)倒置安裝在旋轉(zhuǎn)機(jī)械上,末端永磁體的重力在旋轉(zhuǎn)作用下,作為周期性外激勵(lì),將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為懸臂梁周期性振動(dòng),可以有效采集旋轉(zhuǎn)設(shè)備在低轉(zhuǎn)速范圍內(nèi)的旋轉(zhuǎn)能量.
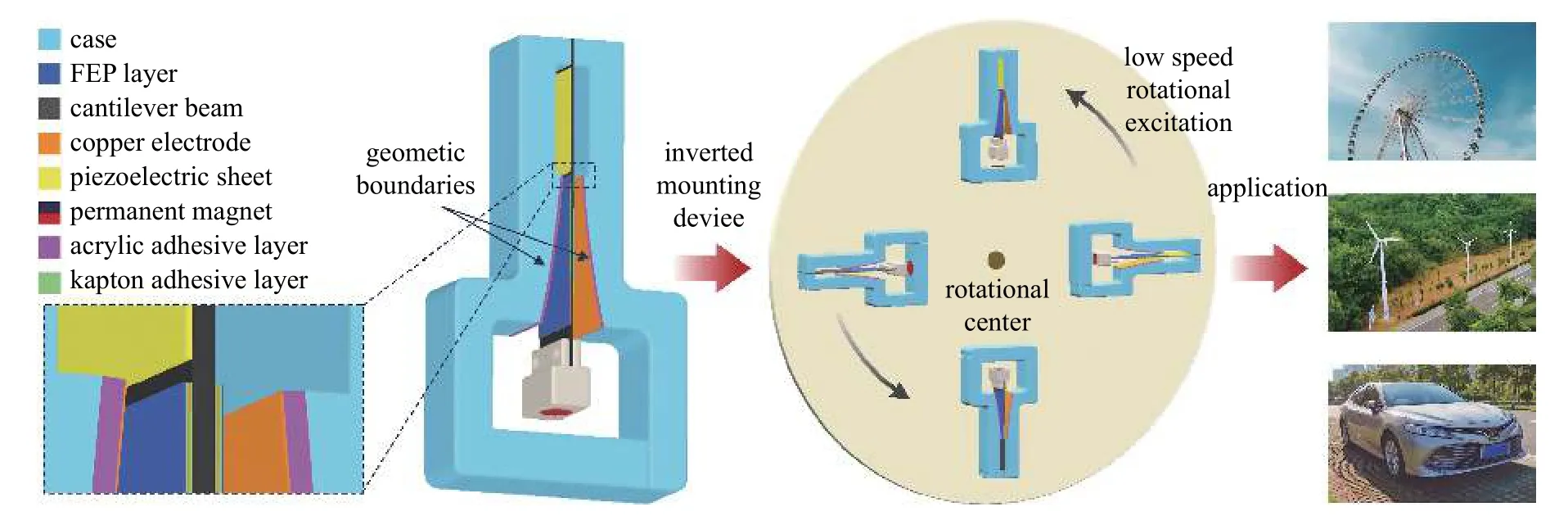
圖2 具有動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制的旋轉(zhuǎn)能量采集器(REH-DCMM)的設(shè)計(jì)示意圖Fig.2 Design of the rotational energy harvester with dynamic coordinated modulation mechanism (REH-DCMM)
2 動(dòng)力學(xué)建模
基于哈密頓原理對(duì)REH-DCMM 系統(tǒng)進(jìn)行動(dòng)力學(xué)建模,REH-DCMM 系統(tǒng)的動(dòng)力學(xué)模型示意圖如圖3 所示.OXYZ為慣性坐標(biāo)系,ORXRYRZR為旋轉(zhuǎn)坐標(biāo)系,系統(tǒng)的旋轉(zhuǎn)角度為 β,角速度為 ω.在剛度軟化效應(yīng)下,系統(tǒng)的動(dòng)能可以表示為
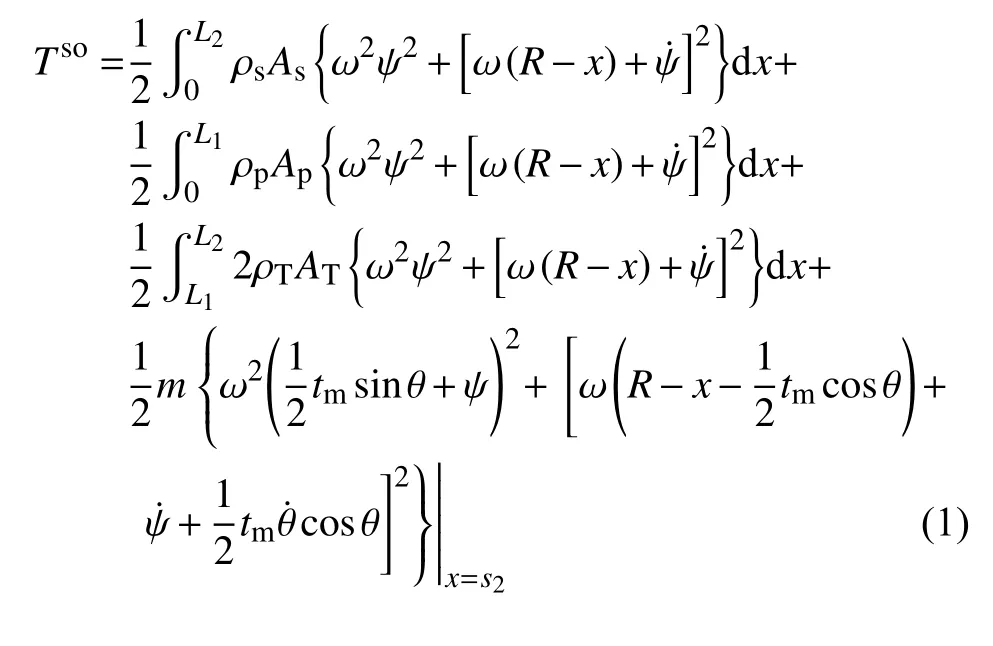
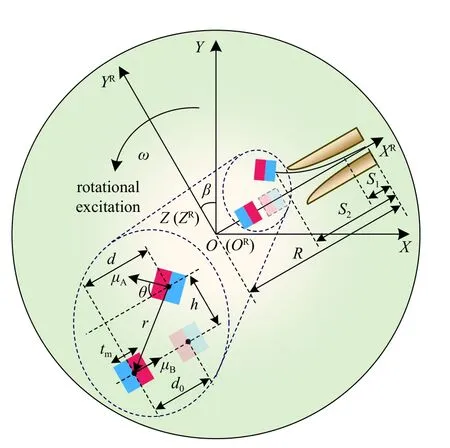
圖3 REH-DCMM 系統(tǒng)的動(dòng)力學(xué)模型示意圖Fig.3 Schematic diagram of dynamic model of REH-DCMM system
式中,R為懸臂梁的夾持端到旋轉(zhuǎn)中心的距離,ψ(x,t)為懸臂梁的撓度,表示ψ對(duì)t求導(dǎo)數(shù),θ 為懸臂梁末端永磁體的偏轉(zhuǎn)角,,tm為永磁體的厚度,m為末端永磁體的質(zhì)量,s1為壓電材料的長(zhǎng)度,s2為懸臂梁的長(zhǎng)度,ρs,ρp和 ρT分別表示懸臂梁,壓電材料和摩擦材料的密度;As,Ap和AT分別表示懸臂梁,壓電材料和摩擦材料的橫截面積;Is,Ip和IT分別表示懸臂梁,壓電材料和摩擦材料的轉(zhuǎn)動(dòng)慣量.
系統(tǒng)在剛度軟化效應(yīng)下的彈性勢(shì)能可以表示為
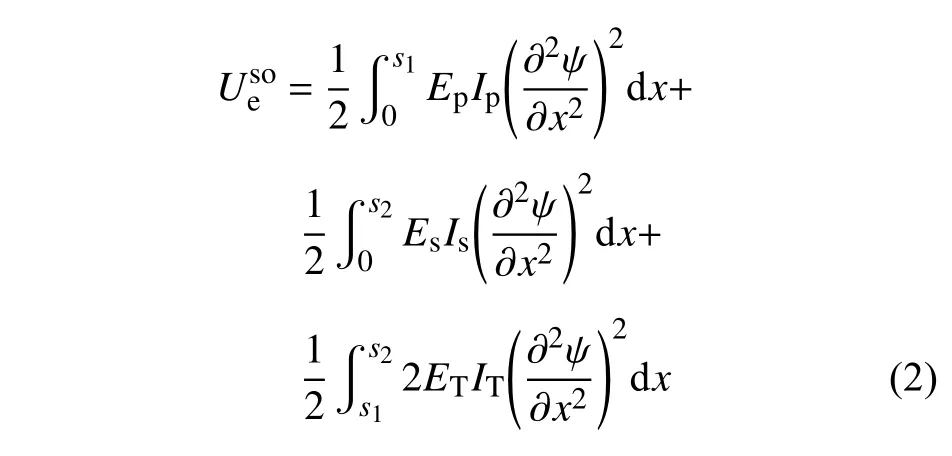
式中,Es,Ep和ET分別表示懸臂梁,壓電材料和摩擦材料的彈性模量.
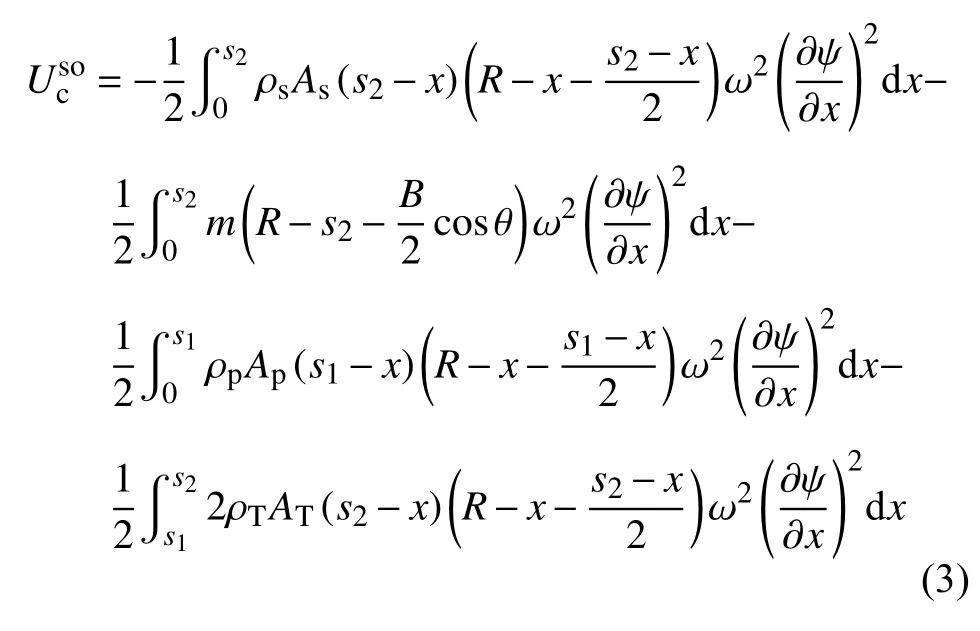
REH-DCMM 系統(tǒng)在剛度軟化效應(yīng)下的離心勢(shì)能可以表示為
REH-DCMM 系統(tǒng)在剛度軟化效應(yīng)下的重力勢(shì)能可以表示為
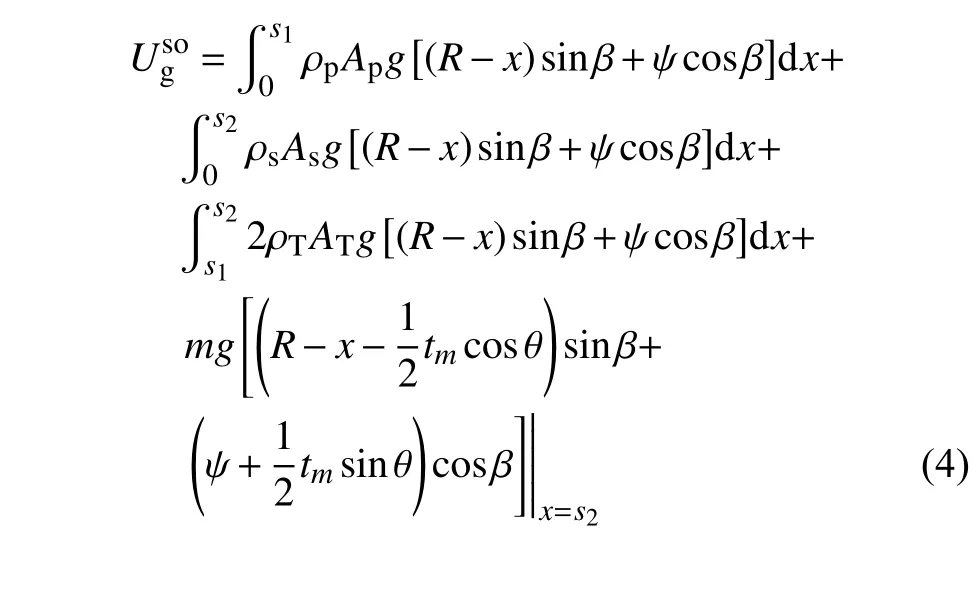
式中,g為重力加速度且g=9.8 m/s2.
壓電材料在d31模式的彎曲焓可定義為

式中,Cp為電容,Cp=ε33bs1hp,e31為機(jī)電耦合系數(shù),ε33為壓電材料介電常數(shù),Vp為壓電材料產(chǎn)生的電壓.
此外,根據(jù)文獻(xiàn)[30],永磁體可以定義為點(diǎn)磁極,懸臂梁末端永磁體的磁矩矢量可以表示為

式中,MA為末端磁體磁化矢量,MA=Br/μ0,Br為剩余磁通密度,μ0為真空磁導(dǎo)率,VA為末端磁體的體積.同理,框架中固定的靜態(tài)永磁體的磁矩矢量可以表示為

式中,MB為靜態(tài)永磁體的磁化矢量,MB=Br/μ0,VB為靜態(tài)永磁體的體積.從點(diǎn)磁極μB到點(diǎn)磁極 μA距離可以表示為

式中,d為懸臂梁末端磁體與靜態(tài)永磁體在XR方向的距離,h為懸臂梁末端磁體與靜態(tài)永磁體在YR方向的距離,分別表示為
式中,d0表示當(dāng)ψ|x=s2=0時(shí)懸臂梁末端磁體與靜態(tài)永磁體間在XR方向的距離.末端磁體在靜態(tài)磁體位置產(chǎn)生的磁場(chǎng)可定義為

式中,? 為向量梯度算子,‖ ‖2為歐幾里德范數(shù).因此,REH-DCMM 系統(tǒng)的磁勢(shì)能可以表示為
如果不考慮機(jī)械能量損失,非保守力的虛功可以表示為

式中,c為機(jī)械阻尼系數(shù),Q為通過壓電單元負(fù)載電阻的電荷量,=Vp/Rp,Rp為壓電單元負(fù)載電阻.由于在懸臂梁振動(dòng)時(shí),第一階模態(tài)占主導(dǎo)地位,基于伽遼金法懸臂梁的橫向位移可表示為

式中,φ(x) 為懸臂梁的第一階模態(tài)振型,φ(x)=1-,y(t) 為廣義位移.
根據(jù)哈密頓原理,考慮剛度軟化效應(yīng)的REHDCMM 系統(tǒng)的拉格朗日方程可以表示為
式中,Lso=Tso-Uso-Um-.因此,REH-DCMM系統(tǒng)的機(jī)電耦合動(dòng)力學(xué)方程為

式中,M,C,和K分別為系統(tǒng)的等效質(zhì)量,等效阻尼和等效剛度; ξ 為機(jī)電耦合系數(shù),F(xiàn)p為非線性幾何邊界與懸臂梁之間的等效碰撞力,當(dāng)y<-ym時(shí),F(xiàn)p=+kp(y+ym),當(dāng)y>ym時(shí),F(xiàn)p=+kp(y-ym),當(dāng) -ym≤y≤ym時(shí),F(xiàn)p=0,ym為非線性邊界與中心點(diǎn)之間在YR方向的距離;RT1和RT2分別為兩個(gè)摩擦納米發(fā)電機(jī)的負(fù)載電阻,QT1和QT2分別為兩個(gè)摩擦納米發(fā)電機(jī)電極間轉(zhuǎn)移的電荷,ε0為真空介電常數(shù),hf和εrf分別為FEP 薄膜的厚度和相對(duì)介電常數(shù),S為非線性幾何邊界與懸臂梁的接觸面積,yT1(t)和yT2(t) 分別為懸臂梁到兩側(cè)非線性幾何邊界在YR方向的等效距離,其中yT1(t)=ym-y,yT2(t)=ym+y.
最后,將機(jī)電耦合方程(15) 帶入Matlab/Simulink 軟件使用變步長(zhǎng)和ode45 運(yùn)算器進(jìn)行數(shù)值仿真,相應(yīng)的初始參數(shù)如表1 所示.
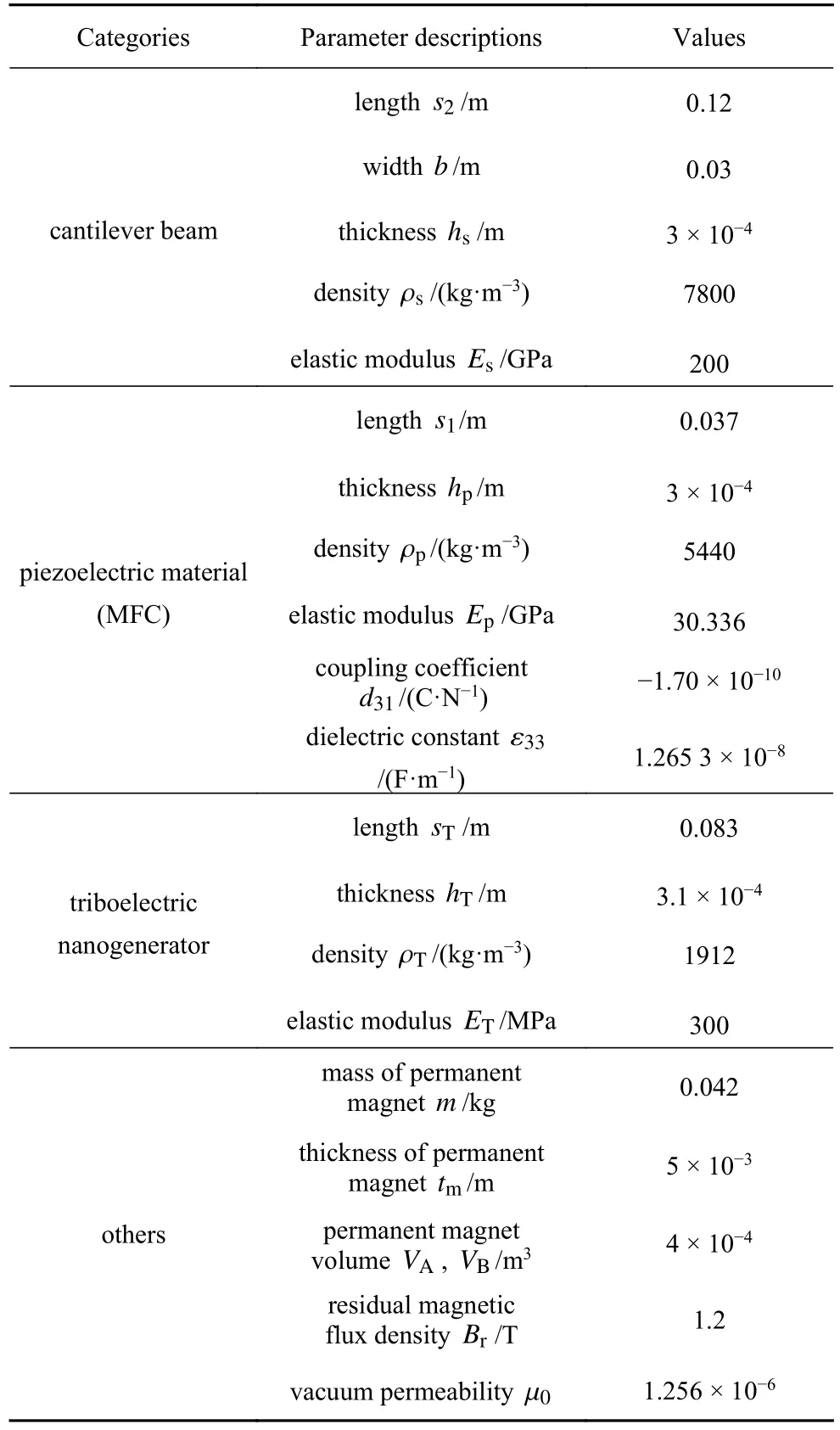
表1 REH-DCMM 系統(tǒng)的幾何和材料參數(shù)Table 1 Geometric and material properties of the REH-DCMM system
3 實(shí)驗(yàn)驗(yàn)證
3.1 實(shí)驗(yàn)系統(tǒng)
為了分析本文提出的動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制在低轉(zhuǎn)速激勵(lì)下的動(dòng)力學(xué)特性和電學(xué)性能以及驗(yàn)證機(jī)電耦合動(dòng)力學(xué)模型,加工了REH-DCMM 的原理樣機(jī)進(jìn)行了一系列實(shí)驗(yàn)測(cè)試,如圖4 所示.表1 列舉了REH-DCMM 的材料和幾何參數(shù).框架通過3D 打印而成,材料為PLA 聚乳酸,懸臂梁的材料為65Mn(ASTM:1566),壓電材料為MFC (M2814-P2,XINMINGTIAN).原理樣機(jī)安裝在轉(zhuǎn)盤上,轉(zhuǎn)盤與伺服電機(jī)(130AEA38025-SH3,SHIDAICHAOQUN)連接,由伺服控制器(DM-38EA,SHIDAICHAOQUN)控制伺服電機(jī),使樣機(jī)轉(zhuǎn)速靈活可控.導(dǎo)電滑環(huán)(SNG000-20S-Y0033,SENRING)安裝在旋轉(zhuǎn)盤的中心,解決旋轉(zhuǎn)過程中的接線繞線問題.原理樣機(jī)的實(shí)驗(yàn)數(shù)據(jù)由動(dòng)態(tài)數(shù)據(jù)采集分析系統(tǒng)(DH5902,DONGHUA)記錄并處理.
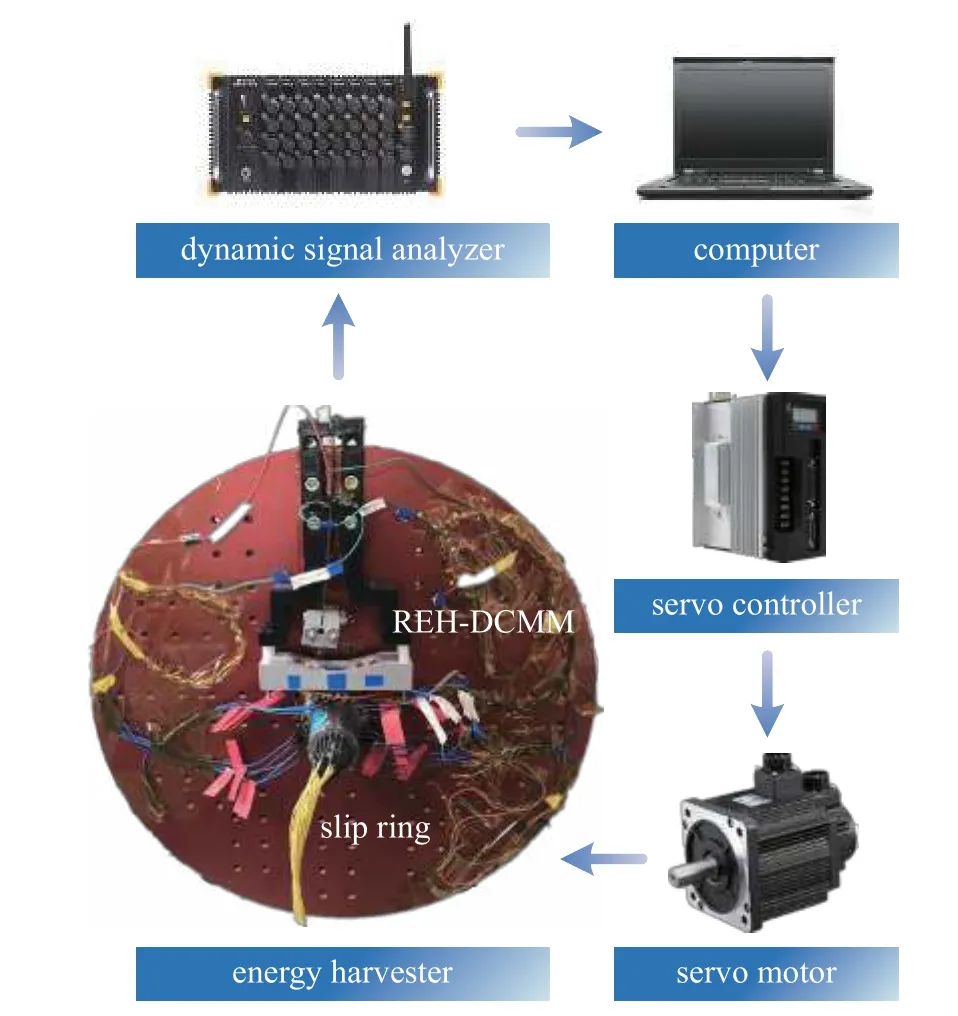
圖4 實(shí)驗(yàn)裝置圖Fig.4 Experimental setup
3.2 結(jié)果分析及討論
在不同轉(zhuǎn)速激勵(lì)下PEH 單元和TENG 單元的實(shí)驗(yàn)和仿真電壓波形如圖5 所示,其中TENG1 和TENG2 分別表示兩側(cè)對(duì)稱的摩擦納米發(fā)電機(jī).當(dāng)轉(zhuǎn)速為150 r/min 時(shí),REH-DCMM 系統(tǒng)處于混沌振動(dòng)狀態(tài),輸出電壓波形相對(duì)不穩(wěn)定,但是系統(tǒng)在剛度軟化、非線性磁力、幾何邊界的共同作用下仍舊能夠保證有效的電壓輸出,實(shí)驗(yàn)與仿真的電壓在趨勢(shì)上保持一致.當(dāng)轉(zhuǎn)速增加到250 r/min 時(shí),幾何邊界限制了梁的振動(dòng)位移,懸臂梁能夠在兩側(cè)邊界內(nèi)產(chǎn)生規(guī)則的振動(dòng).因此,PEH 單元和TENG 單元的電壓波形穩(wěn)定、規(guī)律,兩側(cè)TENG 單元的電壓對(duì)稱性更好,實(shí)驗(yàn)與仿真數(shù)據(jù)吻合良好.實(shí)驗(yàn)和仿真結(jié)果的對(duì)比說(shuō)明了本文建立的理論模型能夠準(zhǔn)確地描述REHDCMM 系統(tǒng)的動(dòng)態(tài)特性和電學(xué)響應(yīng),可以為設(shè)計(jì)提供指導(dǎo).
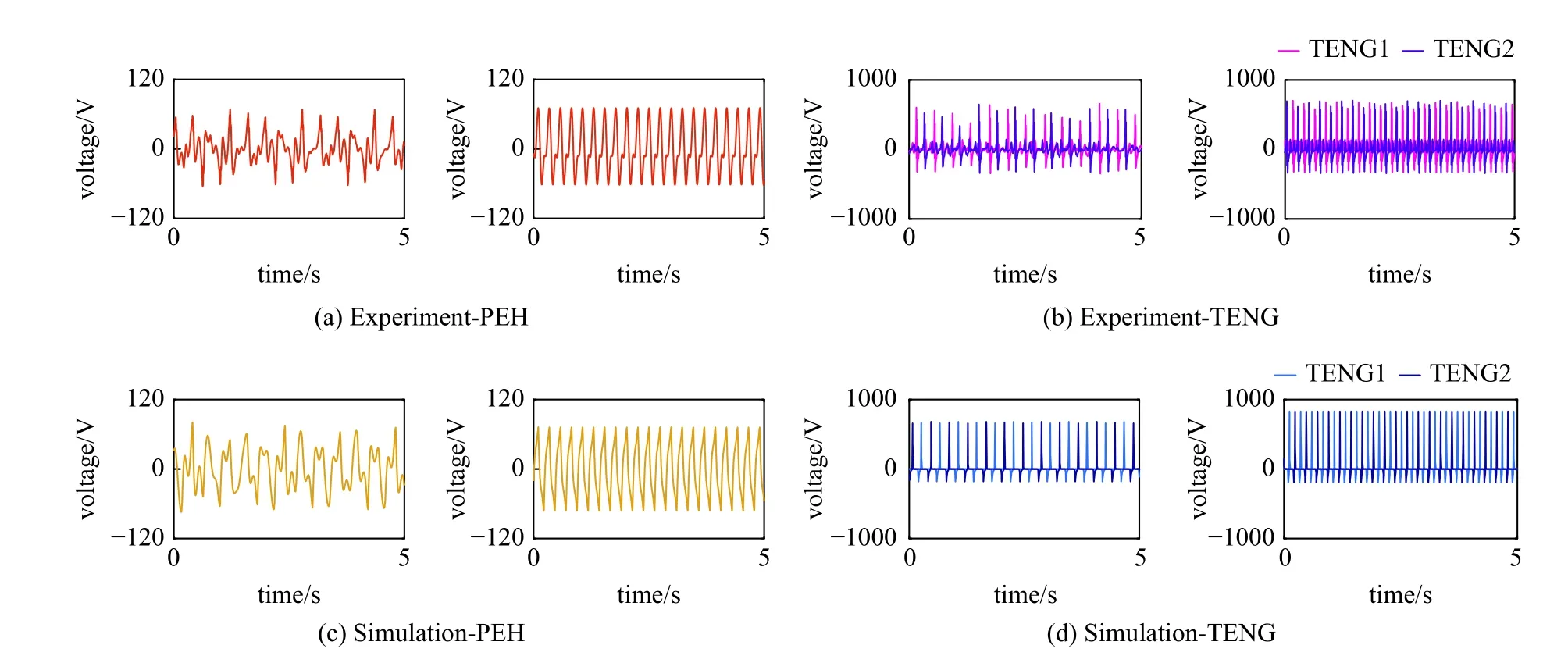
圖5 在不同轉(zhuǎn)速激勵(lì)下PEH 單元和TENG 單元的實(shí)驗(yàn)和仿真電壓波形圖.(a) PEH 單元和(b)TENG 單元在轉(zhuǎn)速為150 r/min 和200 r/min 時(shí)的實(shí)驗(yàn)輸出電壓,(c) PEH 單元和(d)TENG 單元在轉(zhuǎn)速為150 r/min 和200 r/min 時(shí)的仿真輸出電壓Fig.5 Comparison of the output voltage of the PEH and the TENG unit from experiments and simulations at different rotational speeds.The experimental voltage from (a) PEH and (b) TENG at the rotational speed of 150 r/min and 200 r/min,the simulation voltage from (c) PEH and(d) TENG at the rotational speed of 150 r/min and 200 r/min
圖6 對(duì)比了激勵(lì)轉(zhuǎn)速為0~250 r/min 范圍內(nèi),REH-DCMM 系統(tǒng)在不同初始磁極中心距(d0=20,22,24 mm)時(shí)的峰峰值電壓和平均功率.如圖6(a)和圖6(b)所示,PEH 單元的峰峰值電壓和平均功率隨著轉(zhuǎn)速的增加而增加,受到磁力的影響不大,在不同磁力下均能產(chǎn)生較高的電壓和功率.在轉(zhuǎn)速為250 r/min,初始磁極中心距為20 mm 時(shí),PEH 單元的峰峰值電壓為132 V,平均功率為935 μW.這是因?yàn)閴弘妴卧挥趹冶哿旱膴A持端,壓電效應(yīng)的效果主要取決于梁根部的形變量,形變?cè)酱螅妼W(xué)輸出越高.并且由于幾何邊界的調(diào)控,限制了梁的最大位移,磁力對(duì)根部形變影響較小.對(duì)于TENG 單元,如圖6(c)和圖6(d)所示,峰峰值電壓和平均功率隨著轉(zhuǎn)速的增加而增加,并且在同一轉(zhuǎn)速下,磁力越大,電學(xué)輸出性能越好.在轉(zhuǎn)速為250 r/min,初始磁極中心距為20 mm 時(shí),TENG 單元的峰峰值電壓為1128 V,總平均功率為491 μW.這是因?yàn)殡S著轉(zhuǎn)速的增加,懸臂梁與邊界之間的碰撞力增加,并且磁力增加也會(huì)提高碰撞力,有利于TENG 單元的電荷轉(zhuǎn)移和增加有效接觸面積,從而提升TENG 單元的電學(xué)輸出性能.
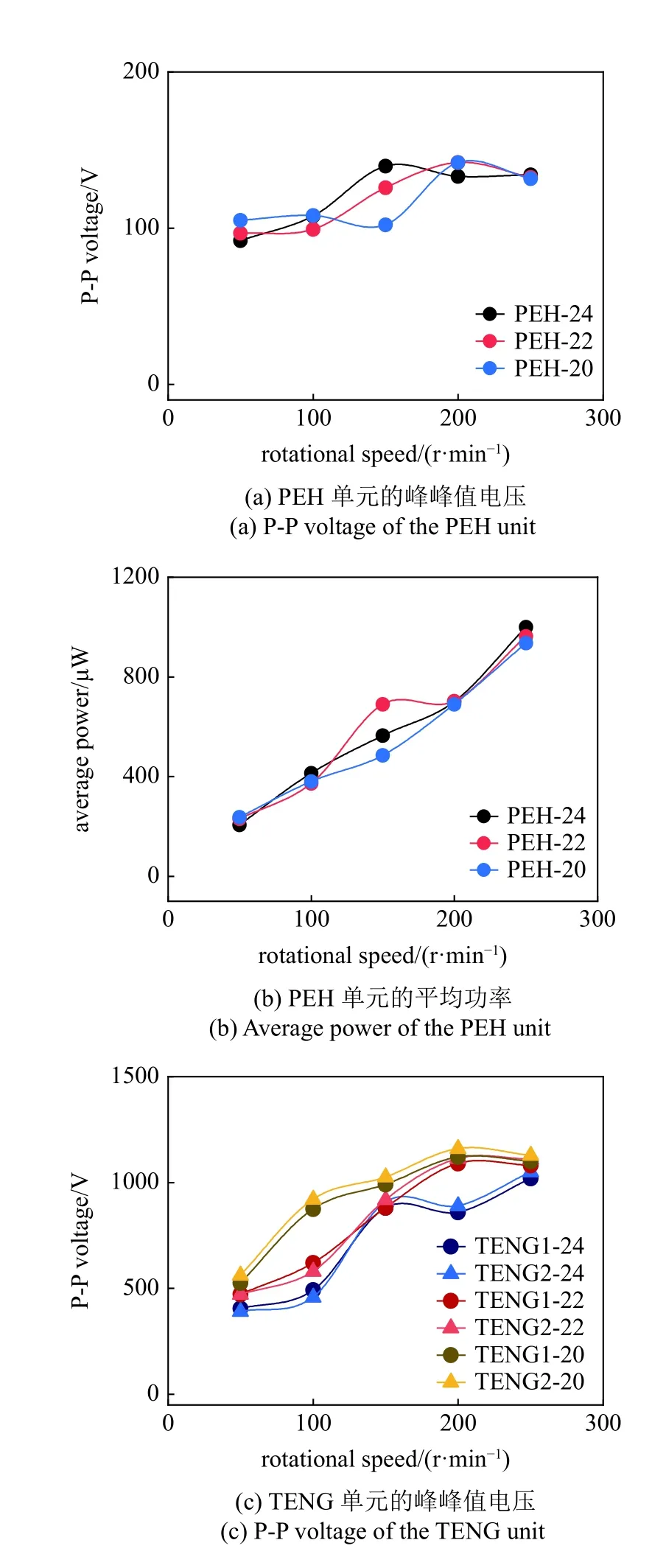
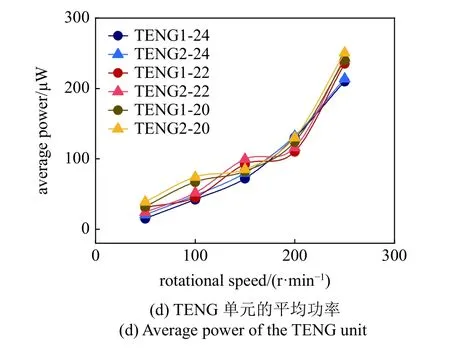
圖6 激勵(lì)轉(zhuǎn)速為0~250 r/min 范圍內(nèi),REH-DCMM 系統(tǒng)在不同初始磁極中心距(d0=20,22,24 mm)時(shí)的P-P 電壓和平均功率Fig.6 Comparison of P-P voltage and average power of the REHDCMM with different center distances of the magnetic poles (d0=20,22,24 mm) at the rotational speed from 0 to 250 r/min
圖7 對(duì)比了激勵(lì)轉(zhuǎn)速為0~250 r/min 范圍內(nèi),REH-DCMM 系統(tǒng)在不同懸臂梁厚度(b=0.2,0.3,0.35 mm)時(shí)的峰峰值電壓和平均功率.如圖7(a)和圖7(b)所示,當(dāng)懸臂梁厚度為0.3 mm 和0.35 mm時(shí),PEH 單元的峰峰值電壓和平均功率隨著轉(zhuǎn)速的升高而增大,并且懸臂梁的厚度越大,PEH 單元的電學(xué)輸出效果越好.在轉(zhuǎn)速為250 r/min,懸臂梁厚度為0.35 mm 時(shí),PEH 單元的峰峰值電壓為140 V,平均功率為1030 μW.因?yàn)樵谙嗤駝?dòng)幅值時(shí),梁的厚度越大,應(yīng)變?cè)酱螅饓弘妼有巫冊(cè)酱螅瑒t因?yàn)閴弘娦?yīng)產(chǎn)生的電壓越高.類似地,當(dāng)懸臂梁厚度為0.3 mm和0.35 mm 時(shí),TENG 單元的峰峰值電壓和平均功率隨著轉(zhuǎn)速的升高而增大,且梁厚度越小,TENG 單元的電學(xué)響應(yīng)越好.在轉(zhuǎn)速為250 r/min,懸臂梁厚度為0.3 mm 時(shí),TENG 單元的峰峰值電壓為1076 V,總平均功率為448 μW.主要原因是薄的梁剛度較小,梁的振動(dòng)位移更大且與邊界材料的接觸更加緊密而充分,提升TENG 的發(fā)電效果.當(dāng)懸臂梁厚度為0.2 mm 時(shí),在0~150 r/min 范圍內(nèi)PEH 單元和TENG單元的峰峰值電壓和平均功率隨著轉(zhuǎn)速的增加而變大,當(dāng)轉(zhuǎn)速繼續(xù)增加時(shí),由于剛度軟化導(dǎo)致梁剛度過低,懸臂梁振動(dòng)效果變差且與邊界難以產(chǎn)生有效接觸分離,因此PEH 單元和TENG 單元的電學(xué)響應(yīng)出現(xiàn)下降趨勢(shì).
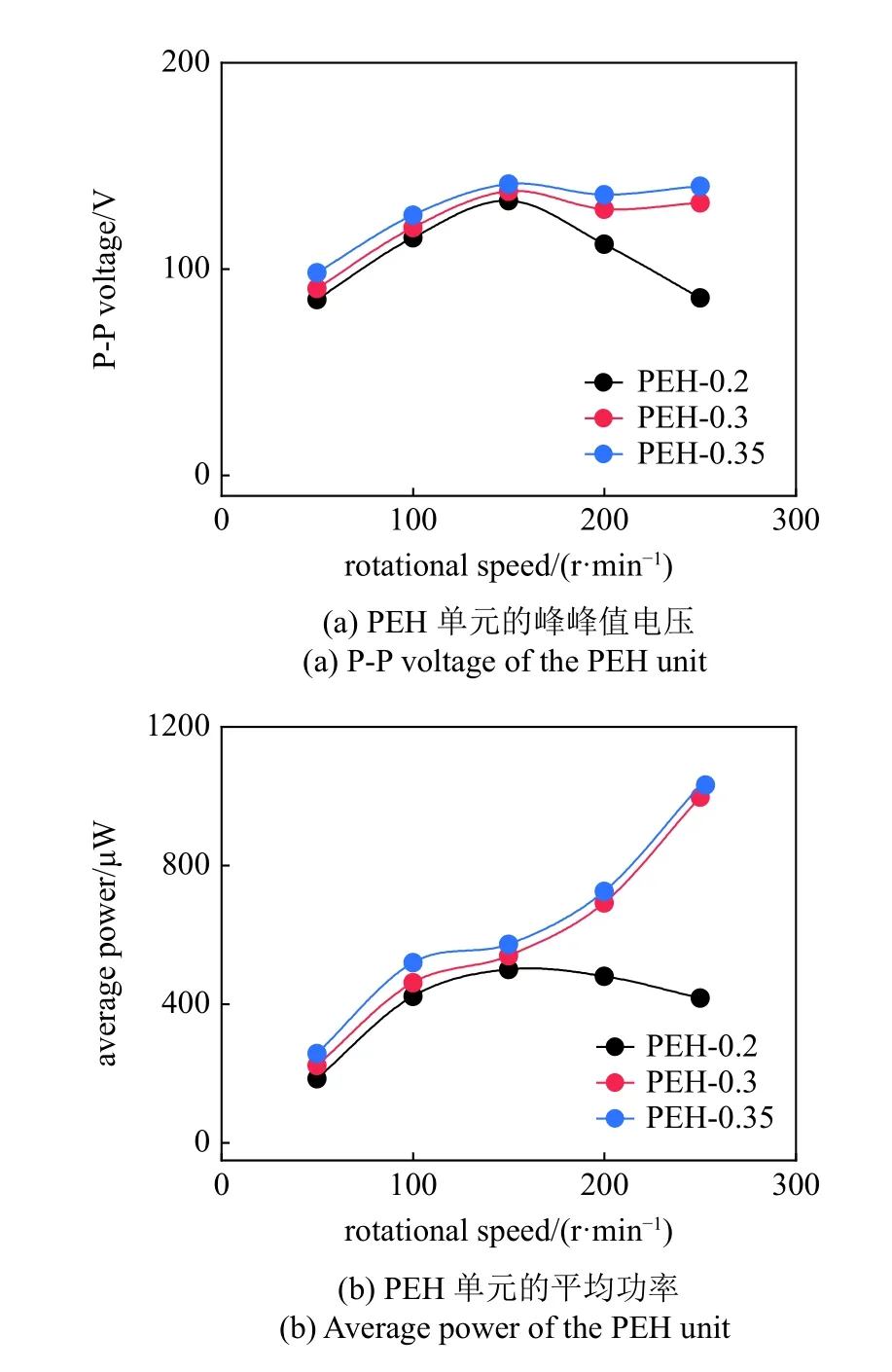
圖7 激勵(lì)轉(zhuǎn)速為0~250 r/min 范圍內(nèi),REH-DCMM 系統(tǒng)在不同懸臂梁厚度(b=0.2,0.3,0.35 mm)時(shí)的P-P 電壓和平均功率Fig.7 Comparison of P-P voltage and average power of the REHDCMM with different thicknesses of the cantilever beam (b=0.2,0.3,0.35 mm) at the rotational speed from 0 to 250 r/min
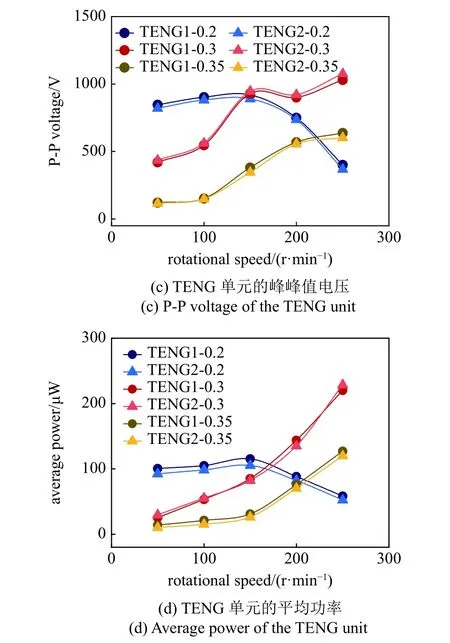
圖7 激勵(lì)轉(zhuǎn)速為0~250 r/min 范圍內(nèi),REH-DCMM 系統(tǒng)在不同懸臂梁厚度(b=0.2,0.3,0.35 mm)時(shí)的P-P 電壓和平均功率(續(xù))Fig.7 Comparison of P-P voltage and average power of the REHDCMM with different thicknesses of the cantilever beam (b=0.2,0.3,0.35 mm) at the rotational speed from 0 to 250 r/min (continued)
圖8 對(duì)比了在磁間距20 mm,梁厚度0.3 mm 的相同參數(shù)下,激勵(lì)轉(zhuǎn)速為0~250 r/min 范圍內(nèi),REHDCMM 系統(tǒng)在剛度軟化和硬化效應(yīng)下的輸出電壓.如圖8(a)所示,PEH 單元在剛度軟化效應(yīng)下的輸出電壓高于PEH 單元在剛度硬化效應(yīng)下輸出電壓.這是因?yàn)椋诘娃D(zhuǎn)速下,剛度軟化可以使梁的剛度降低,提高懸臂梁夾持端的形變,更加有利于壓電材料的形變.TENG1 和TENG2 單元分別為兩側(cè)對(duì)稱的摩擦納米發(fā)電機(jī),它們的輸出電壓在0~250 r/min 范圍內(nèi)受到剛度軟化和剛度硬化的影響更明顯.低速時(shí),剛度軟化可以使懸臂梁自由端更加柔軟,與幾何邊界的接觸會(huì)更加充分,提高了有效接觸面積,有利于兩層摩擦材料之間的電荷轉(zhuǎn)移,提高TENG 的輸出電壓.由此可以證明剛度軟化、非線性磁力、幾何邊界協(xié)同調(diào)控的機(jī)制更加適用于低速旋轉(zhuǎn)能量采集.
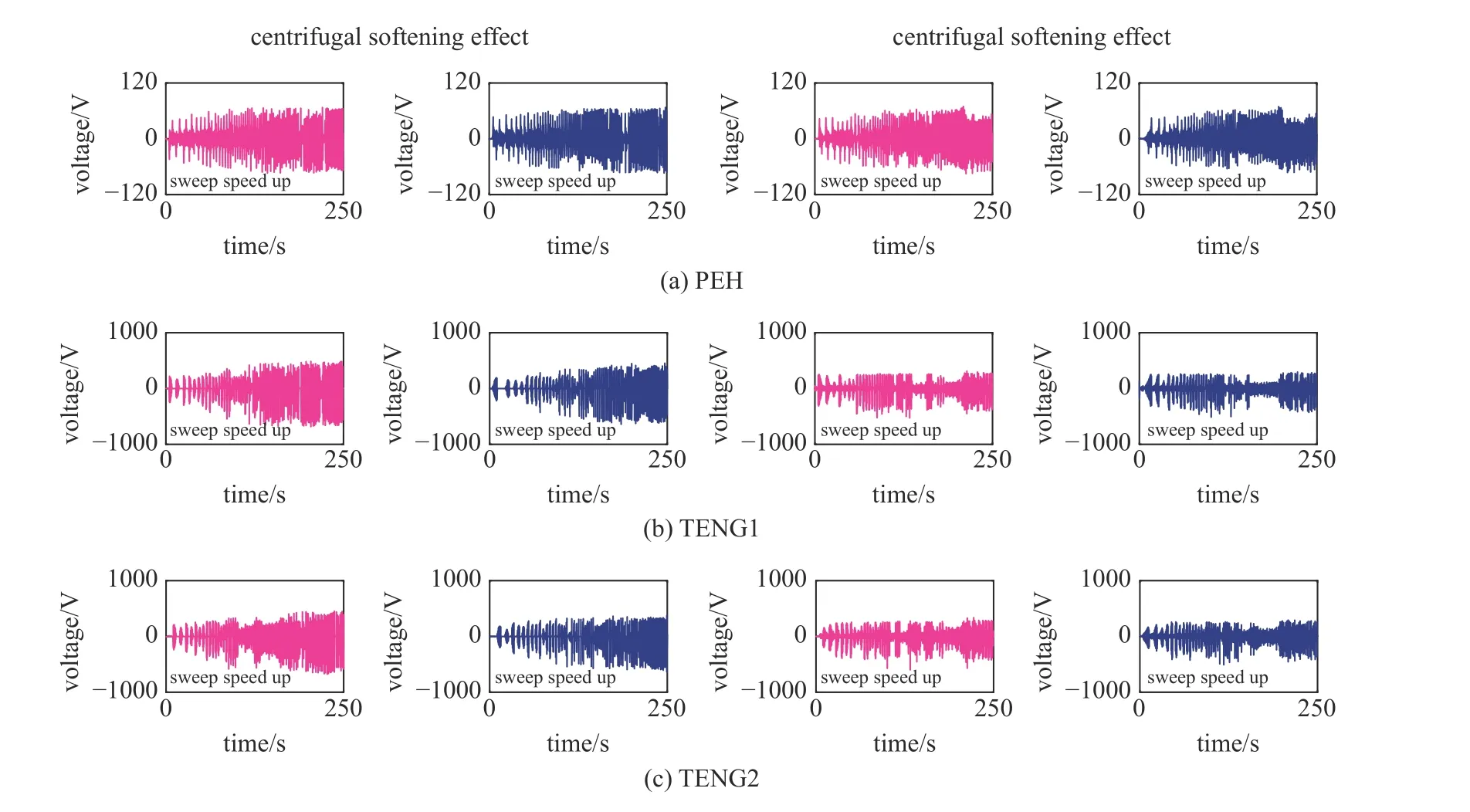
圖8 在剛度軟化和剛度硬化效應(yīng)下,磁間距20 mm,梁厚度0.3 mm 時(shí),PEH 單元和TENG 單元輸出電壓對(duì)比.(a) PEH 單元,(b) TENG1 單元,(c) TENG2 單元Fig.8 Comparison of the output voltage of the PEH and the TENG unit between centrifugal softening and centrifugal stiffening effects with the same condition (d0=20 mm,b=0.3 mm).(a) PEH unit,(b) TENG1 unit,(c) TENG2 unit
4 結(jié)論
本文提出了一種動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制用于低轉(zhuǎn)速下旋轉(zhuǎn)能量采集.剛度軟化、非線性磁力、幾何邊界的協(xié)同調(diào)控可以提高系統(tǒng)在低速下的振動(dòng)位移,也可以調(diào)控系統(tǒng)的最大振動(dòng)位移,使系統(tǒng)更可控和可靠性更好.幾何邊界可以方便地集成摩擦納米發(fā)電機(jī),實(shí)現(xiàn)壓電與摩擦兩種機(jī)電轉(zhuǎn)換機(jī)制分別在振動(dòng)和碰撞過程協(xié)同發(fā)電,有效利用空間和增加輸出電能.建立了系統(tǒng)的機(jī)電耦合方程并進(jìn)行了實(shí)驗(yàn)驗(yàn)證.主要結(jié)論如下:
(1)動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制可以使系統(tǒng)在低轉(zhuǎn)速激勵(lì)下有效采集能量,系統(tǒng)可以在0~250 r/min 范圍內(nèi)有效工作,在轉(zhuǎn)速為250 r/min 時(shí),壓電單元和摩擦納米發(fā)電機(jī)的最大峰峰值電壓分別為132 V 和1128 V,總平均功率為1426 μW.
(2)在合理范圍內(nèi),其他參數(shù)保持不變時(shí),磁力越大,摩擦納米發(fā)電機(jī)的輸出電壓越大,平均功率越大;壓電單元由于幾何邊界的限制,電壓和平均功率隨磁力沒有顯著變化.
(3)在合理范圍內(nèi),其他參數(shù)保持不變時(shí),懸臂梁厚度越小,低轉(zhuǎn)速下摩擦納米發(fā)電機(jī)的電學(xué)輸出效果越好;但梁厚度過小,隨著轉(zhuǎn)速增加剛度軟化效應(yīng)導(dǎo)致剛度過低,系統(tǒng)電學(xué)輸出會(huì)降低.
本文提出的動(dòng)力學(xué)協(xié)同調(diào)控機(jī)制考慮了多種性能提升技術(shù)的相互影響與協(xié)同,為能量采集系統(tǒng)動(dòng)力學(xué)和電學(xué)性能改進(jìn)提供新的途徑,可以為物聯(lián)網(wǎng)中的傳感器提供零碳環(huán)保、靈活便捷、可持續(xù)的電能.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32