黃瓜皮插孔裝置的設(shè)計(jì)與仿真
2021-12-21 08:14:48任曉智王文杰
裝備制造技術(shù) 2021年8期
關(guān)鍵詞:工藝
任曉智,王文杰
(廣西大學(xué)機(jī)械工程學(xué)院,南寧 530004)
0 前言
黃瓜皮是廣西欽州市著名的地方特產(chǎn)。黃瓜皮的加工工藝流程大致分為原料選擇、插孔、燙瓜、壓榨、切碎、調(diào)味、殺菌、冷卻、包裝至成品[1]。為了使黃瓜在熱水中更快吸熱變軟,壓榨更易排水,在壓榨之前安排有插孔工藝,但目前插孔方法一般是使用錐子、竹簽等傳統(tǒng)工具人工插孔,插孔工藝勞動(dòng)強(qiáng)度大、生產(chǎn)效率低且有一定的安全風(fēng)險(xiǎn)。
為解決上述人工插孔的弊端,作者提出了一種黃瓜皮插孔工藝裝置。該裝置在設(shè)計(jì)過程中以實(shí)際工藝需求為導(dǎo)向,以自動(dòng)化為要求,經(jīng)歷反復(fù)的結(jié)構(gòu)優(yōu)化,實(shí)現(xiàn)黃瓜的插孔和運(yùn)輸自動(dòng)化,為黃瓜皮插孔工藝提供了一種新的解決方案。
1 設(shè)計(jì)原理及機(jī)構(gòu)
1.1 設(shè)計(jì)原理
該裝置以液壓為主要?jiǎng)恿Γ簤阂砸后w為媒介,易實(shí)現(xiàn)直線運(yùn)動(dòng)和自動(dòng)化,反應(yīng)迅速,污染小;由電控系統(tǒng)控制,通過機(jī)械系統(tǒng)對(duì)黃瓜皮進(jìn)行插孔,機(jī)械系統(tǒng)主要作用有:一是在保證黃瓜固定可靠的前提下對(duì)黃瓜進(jìn)行插孔;二是利用兩次插孔的間歇時(shí)間即插孔機(jī)構(gòu)回程時(shí)間完成運(yùn)輸機(jī)構(gòu)的工位切換。采用齒條與單向齒輪將運(yùn)輸機(jī)構(gòu)和插孔機(jī)構(gòu)聯(lián)系起來,實(shí)現(xiàn)流水作業(yè),加以收集。整個(gè)過程無需依靠人力,提高了生產(chǎn)效率,減輕人工勞動(dòng)強(qiáng)度,且本裝置設(shè)計(jì)簡(jiǎn)便,適用范圍廣泛,可靠性高。
1.2 總體設(shè)計(jì)
黃瓜皮插孔工藝裝置由電控系統(tǒng)及液壓驅(qū)動(dòng)裝置、傳動(dòng)機(jī)構(gòu)和執(zhí)行機(jī)構(gòu)等組成。其中傳動(dòng)機(jī)構(gòu)包括鏈輪鏈條機(jī)構(gòu)和齒條單向傳動(dòng)齒輪聯(lián)動(dòng)機(jī)構(gòu),執(zhí)行機(jī)構(gòu)包括定位插孔板及固定托盤。結(jié)構(gòu)示意圖如圖1所示。

圖1 黃瓜皮插孔裝置結(jié)構(gòu)圖
機(jī)架和工作平臺(tái)支撐電控、液壓裝置、傳動(dòng)機(jī)構(gòu)等。整個(gè)裝置由液壓缸提供驅(qū)動(dòng)力,為插孔板下落提供動(dòng)力。液壓缸后的機(jī)架上掛有電控裝置控制液壓缸在特定時(shí)間提供動(dòng)力。電路板設(shè)有開關(guān),開關(guān)有彈簧復(fù)位裝置,可以自動(dòng)歸位,通過開關(guān)可以控制液壓閥的工位,從而控制液壓推桿的上升下降。
兩個(gè)定位桿保證定位平臺(tái)及插孔板能保持豎直平穩(wěn)下落。當(dāng)黃瓜傳送到預(yù)期位置時(shí)液壓裝置啟動(dòng),通過液壓推桿將運(yùn)動(dòng)傳遞到定位平臺(tái),驅(qū)動(dòng)定位平臺(tái)帶動(dòng)插孔板下落,同時(shí),固定在定位平臺(tái)后的齒條向下運(yùn)動(dòng),此時(shí)單向傳動(dòng)齒輪空轉(zhuǎn),不帶動(dòng)主軸轉(zhuǎn)動(dòng),從而達(dá)到插孔板下落而托盤(盛裝黃瓜)不會(huì)向前移動(dòng)的目的。
完成黃瓜插孔后電控裝置轉(zhuǎn)換液壓閥工位,使液壓缸復(fù)位,帶動(dòng)插孔板豎直向上運(yùn)動(dòng),齒條隨之向上運(yùn)動(dòng)。通過齒條帶動(dòng)單向齒輪轉(zhuǎn)動(dòng),此時(shí)單向傳動(dòng)齒輪帶動(dòng)鏈輪轉(zhuǎn)動(dòng),從而帶動(dòng)鏈條進(jìn)行傳動(dòng),將插好孔的黃瓜送離,傳遞下一份未插孔黃瓜,實(shí)現(xiàn)了固定托盤工位切換,達(dá)到自動(dòng)插孔及自動(dòng)傳輸黃瓜的目的。
2 動(dòng)力學(xué)仿真分析
為驗(yàn)證黃瓜皮插孔裝置的機(jī)械系統(tǒng)運(yùn)行可行性,將UG 中的關(guān)鍵部件模型導(dǎo)入Adams 中進(jìn)行仿真分析。
2.1 插孔板仿真分析
對(duì)于插孔板,在液壓缸的輸出推力54.058 N 和輸出拉力13.986 N 的情況下,取時(shí)間為9 s、步長為500 mm 的仿真方案,通過Adams 后處理模塊Post-Processor 進(jìn)行處理,可以得到其位移曲線圖和運(yùn)動(dòng)曲線圖。
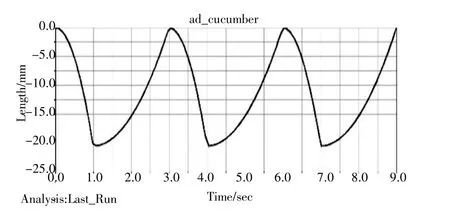
圖2 Y 方向位移曲線圖(插孔板仿真)
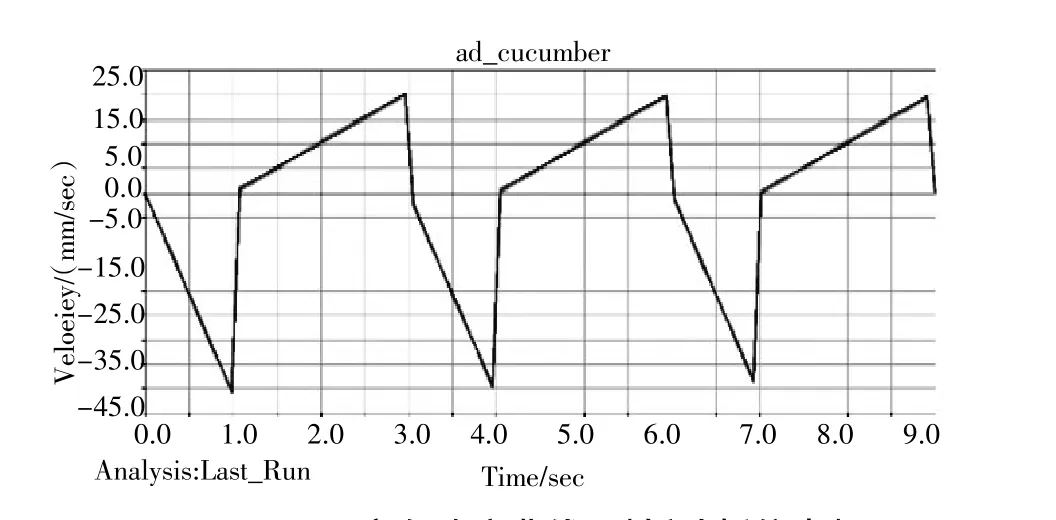
圖3 Y 方向速度曲線圖(插孔板仿真)
通過仿真分析可知所設(shè)計(jì)機(jī)構(gòu)運(yùn)動(dòng)合理,各部件之間不存在干涉。插孔板在液壓缸的穩(wěn)定壓力作用下,做以3 s 為一個(gè)周期的周期運(yùn)動(dòng),下行插孔過程和上行拔孔過程分別是加速度不同的勻加速直線運(yùn)動(dòng)。
考慮到液壓缸設(shè)有背壓閥,故不計(jì)入插孔板重力,由力的傳遞特性可知插孔力即為液壓缸推力54.058 N,大于黃瓜穿刺所需最大力[2],裝置可以完成黃瓜插孔工藝,并保證插孔的流暢性。
2.2 運(yùn)輸機(jī)構(gòu)仿真分析
在Adams 中建立齒條與單向齒輪的齒輪副的運(yùn)動(dòng)仿真,設(shè)置仿真時(shí)長9 s,步長300 mm,從后處理模塊觀察單向齒輪旋轉(zhuǎn)過程中的角位移隨時(shí)間變化曲線,如圖4 所示。
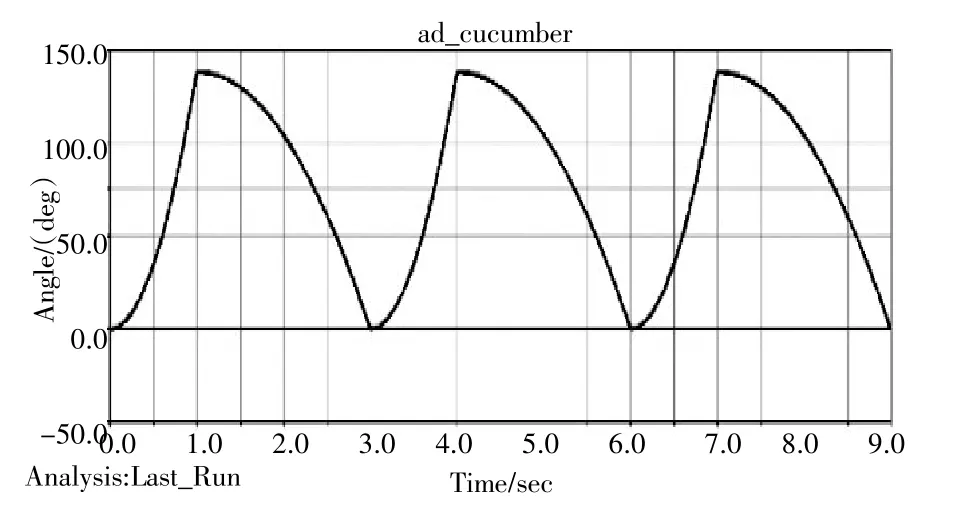
圖4 單向齒輪的角位移隨時(shí)間變化曲線圖
從圖5 可以看出,單向齒輪和插孔板的運(yùn)動(dòng)具有一致性,以3 s 為一個(gè)周期。0~1 s,插孔板向下做插孔動(dòng)作,此時(shí)單向齒輪順時(shí)針空轉(zhuǎn),不起傳動(dòng)作用,鏈條上的固定托盤保持工位不變,接受插孔板插孔工藝;1~3 s,插孔板向上運(yùn)動(dòng)做拔孔動(dòng)作,此時(shí)單向齒輪逆時(shí)針轉(zhuǎn)動(dòng),與傳動(dòng)軸配合,帶動(dòng)鏈輪鏈條轉(zhuǎn)動(dòng),固定托盤依次向前運(yùn)動(dòng)一個(gè)工位。1~3 s 內(nèi)單向齒輪角位移為θ=136°,在上述標(biāo)準(zhǔn)轉(zhuǎn)動(dòng)角度134.86°的誤差允許范圍內(nèi),滿足傳動(dòng)機(jī)構(gòu)運(yùn)行即工位轉(zhuǎn)換要求。
2.3 插孔工藝過程仿真
通過Adams 的柔性體建模,建立黃瓜的柔性體模型,將仿真黃瓜模型放置在插孔板下方的固定托盤上,從初始位置開始仿真,設(shè)置仿真時(shí)間為3 s,步長100 mm 的仿真方案,通過后處理模塊中的碰撞約束分析,得到插孔板與黃瓜的穿透力學(xué)曲線圖,如圖5 所示。

圖5 Y 方向受力曲線圖(一個(gè)周期)
通過受力曲線可知:當(dāng)插孔板接觸黃瓜做插孔工藝時(shí),黃瓜所受最大力為53.960 N,而液壓缸產(chǎn)生的推桿推力為54.058 N,考慮到機(jī)械損耗,符合實(shí)際情況。穿刺所用最大力就是所測(cè)果實(shí)的堅(jiān)實(shí)度[3],而黃瓜在不同貯藏條件下的堅(jiān)實(shí)度都在30 N 以下,所以該機(jī)構(gòu)可以滿足黃瓜插孔力的實(shí)際要求。
3 結(jié)論
根據(jù)黃瓜皮插孔實(shí)際工藝要求,利用三維建模軟件設(shè)計(jì)模型,導(dǎo)入Adams 進(jìn)行仿真分析,驗(yàn)證了裝置合理性和可行性。該黃瓜皮插孔裝置以插孔板和傳輸機(jī)構(gòu)及其聯(lián)動(dòng)機(jī)構(gòu)為核心設(shè)計(jì),整體機(jī)構(gòu)運(yùn)行合理,本機(jī)構(gòu)可顯著提高插孔工作效率,可大大降低人工勞動(dòng)強(qiáng)度,具有實(shí)用性高、自動(dòng)化程度高等特點(diǎn),可以滿足黃瓜皮插孔工藝需求。
猜你喜歡
中國特種設(shè)備安全(2022年5期)2022-08-26 09:19:32
礦產(chǎn)綜合利用(2020年1期)2020-07-24 08:50:40
山東冶金(2019年6期)2020-01-06 07:45:54
收藏界(2019年2期)2019-10-12 08:26:06
世界農(nóng)藥(2019年2期)2019-07-13 05:55:12
世界農(nóng)藥(2019年2期)2019-07-13 05:55:10
模具制造(2019年3期)2019-06-06 02:11:00
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:30:59
銅業(yè)工程(2015年4期)2015-12-29 02:48:39
新疆鋼鐵(2015年3期)2015-11-08 01:59:52