振鏡系統(tǒng)自適應(yīng)離散滑模控制器設(shè)計與仿真
2021-12-28 08:24:16王云龍陳光勝
農(nóng)業(yè)裝備與車輛工程 2021年12期
王云龍,陳光勝
(200093 上海市 上海理工大學(xué) 機(jī)械工程學(xué)院)
0 引言
當(dāng)前,國外振鏡系統(tǒng)生產(chǎn)廠家主要有SCANLAB 公司、GSI 公司、CTI 公司等,其中SCANLAB 公司的振鏡掃描系統(tǒng)達(dá)到行業(yè)最高質(zhì)量標(biāo)準(zhǔn);國內(nèi)主要生產(chǎn)廠家有深圳大族思特科技有限公司、上海眸特電機(jī)科技有限公司、北京金海創(chuàng)科技有限公司等。國內(nèi)振鏡行業(yè)起步較晚,技術(shù)相對國外較為落后,但隨著近些年的發(fā)展也具有一定的實力。
控制算法是影響振鏡控制系統(tǒng)性能的核心因素。當(dāng)前在振鏡控制系統(tǒng)中的控制策略應(yīng)用主要以PID 算法為主。馬玉中[1]采用數(shù)字PID 控制激光振鏡掃描系統(tǒng),在大角度定位時,系統(tǒng)響應(yīng)較慢;井鋒[2]提出了一種改進(jìn)的模糊PID 算法,但模糊規(guī)則在數(shù)字電路的實現(xiàn)較為復(fù)雜。由于PID控制算法及其改進(jìn)算法在實際應(yīng)用中的限制,將高性能的控制算法引入到振鏡控制系統(tǒng)中就變得尤為迫切[3]。
本文基于現(xiàn)代控制理論,并結(jié)合計算機(jī)技術(shù),研究了一種基于自適應(yīng)離散滑模變結(jié)構(gòu)的振鏡系統(tǒng)控制器設(shè)計原理與方法,利用離散滑模變結(jié)構(gòu)控制系統(tǒng)的準(zhǔn)滑動模態(tài)[4]具有一定的不變性來增強(qiáng)系統(tǒng)的魯棒性,并通過自適應(yīng)控制在線調(diào)整趨近律中的控制增益,提高系統(tǒng)動態(tài)品質(zhì)。
1 振鏡電機(jī)數(shù)學(xué)模型的建立
振鏡電機(jī)是一種特殊的擺動電機(jī),其基本原理是通電線圈在磁場中產(chǎn)生力矩,但只能偏轉(zhuǎn)一定角度,偏轉(zhuǎn)角度與電流成正比。
振鏡的電樞平衡方程為

式中:R——振鏡電機(jī)的電樞電阻;L——振鏡電機(jī)的電樞電感;Eb——振鏡電機(jī)的反電動勢;i——振鏡電機(jī)的電流。
振鏡電機(jī)的轉(zhuǎn)矩平衡方程為

式中:T——振鏡電機(jī)的線圈電流產(chǎn)生的電磁轉(zhuǎn)矩;J——振鏡電機(jī)轉(zhuǎn)子的轉(zhuǎn)動慣量;θ——振鏡電機(jī)轉(zhuǎn)子偏轉(zhuǎn)角度;B——振鏡電機(jī)內(nèi)部的粘性阻尼系數(shù)。
振鏡電機(jī)的電磁轉(zhuǎn)矩方程為

式中:Kt——振鏡電機(jī)的轉(zhuǎn)矩系數(shù)。
振鏡電機(jī)的反電動勢為

式中:Kb——振鏡電機(jī)的反電動勢系數(shù)。
將式(1)—式(4)分別進(jìn)行拉普拉斯變換,經(jīng)整理簡化后,得到振鏡電機(jī)伺服系統(tǒng)的傳遞函數(shù)為


雖然電機(jī)中實際存在反向電動勢,但在放大器中有一個電流調(diào)節(jié)環(huán)路可以補(bǔ)償反向電動勢造成的轉(zhuǎn)矩?fù)p失,因此可以在模型中忽略其影響[5]。式(6)可以簡化為

因此,得到振鏡電機(jī)控制系統(tǒng)動力學(xué)模型,如圖1 所示。
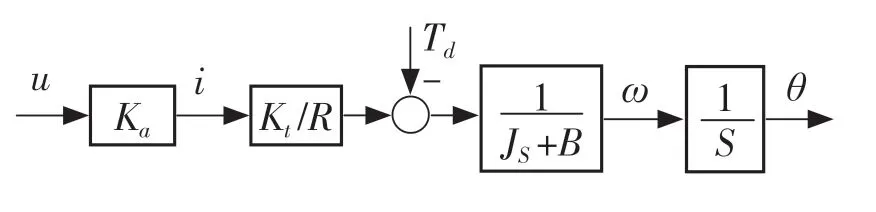
圖1 振鏡電機(jī)控制系統(tǒng)動力學(xué)模型Fig.1 Dynamic model of galvanometer motor control system
圖1 中:u——控制信號;Ka——電流放大系數(shù);i——電流;Td——摩擦力矩;ω——轉(zhuǎn)子角速度;θ——轉(zhuǎn)子角位置。
由圖1 得振鏡電機(jī)控制系統(tǒng)的狀態(tài)空間表達(dá)式為

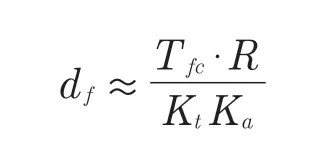
振鏡電機(jī)實際運(yùn)動中,可忽略非線性摩擦的影響,只考慮庫倫摩擦力Tfc,則摩擦力的等效輸入
對式(8)進(jìn)行零階保持離散化,得系統(tǒng)離散狀態(tài)空間表達(dá)式為

2 自適應(yīng)離散滑模控制器設(shè)計
振鏡系統(tǒng)的控制實際上是跟蹤問題,設(shè)R(k)為希望的指令信號,xe(k)=e(k)=R(k)-x(k)。則振鏡系統(tǒng)式(9)的離散狀態(tài)方程為

2.1 離散自適應(yīng)趨近率
對于離散系統(tǒng),滑模變結(jié)構(gòu)控制不能產(chǎn)生理想的滑動模態(tài),只能產(chǎn)生準(zhǔn)滑動模控制[4],其指數(shù)趨近率為

式中:ε>0;q>0;1-qT>0;T——采樣周期。
參數(shù)ε是一個關(guān)鍵參數(shù),ε值越小,可以降低系統(tǒng)抖振,但過小的值會導(dǎo)致系統(tǒng)到達(dá)切換面的趨近速度過慢,考慮到技術(shù)、設(shè)備等實際因素,采樣周期也不可能取特別小,因此理想的ε值應(yīng)該是時變的[6-7]。由s(k)遞減得到充分條件為

將式(14)代入式(12),得到自適應(yīng)離散趨近率為

結(jié)合式(9)、式(11)、式(15),假設(shè)CB ≠0,則振鏡系統(tǒng)位置跟蹤的控制率為

式中:s(k)=Cex(k);Ce=[c,1];c,q——影響滑模控制的兩個重要參數(shù),適當(dāng)?shù)娜≈悼梢缘玫搅己玫南到y(tǒng)性能;R1=[r(k+1),dr(k+1)],可以通過外推法得到。
2.2 系統(tǒng)穩(wěn)定性驗證
離散系統(tǒng)到達(dá)條件為

選取李雅普諾夫函數(shù)

根據(jù)李雅普諾夫定理,滿足s(k)=0 是全局漸近穩(wěn)定平衡面的到達(dá)條件可取為

當(dāng)采樣時間很小時,離散滑模的存在和到達(dá)性條件為[8]

由自適應(yīng)離散趨近率式(15)可得
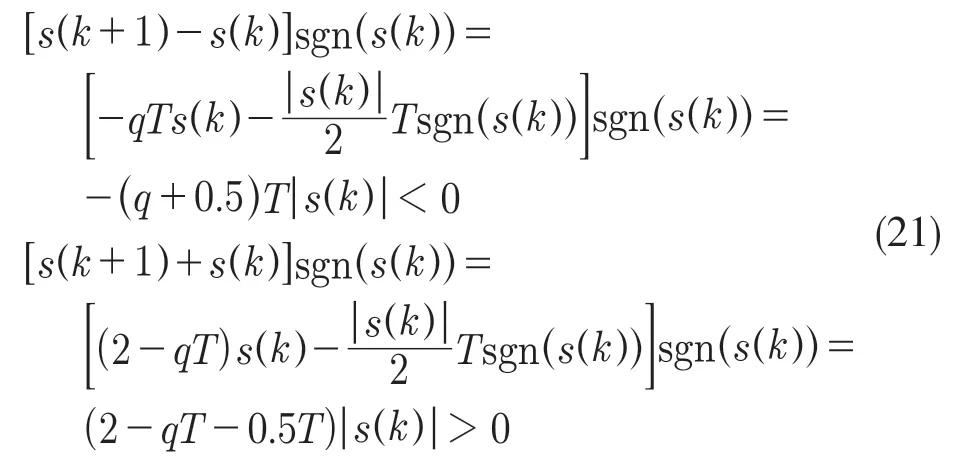
因此,改進(jìn)后的趨近率滿足滑動模態(tài)的存在性和到達(dá)性條件,控制系統(tǒng)是穩(wěn)定的。
3 參數(shù)辨識
根據(jù)式(9)、式(15)、式(16),需要處理的參數(shù)有J,Kt,Ka,R,B,Ts,df,c,q,其中Kt,Ka,R 可通過測量和計算得到,Ts根據(jù)現(xiàn)有硬件條件取Ts=2.5×10-5(s),根據(jù)調(diào)試經(jīng)驗取 x=6 000,q=8 000。
依據(jù)改進(jìn)的最小二乘法對J,B,df進(jìn)行離線辨識[9],得到仿真模型的參數(shù)見表1。
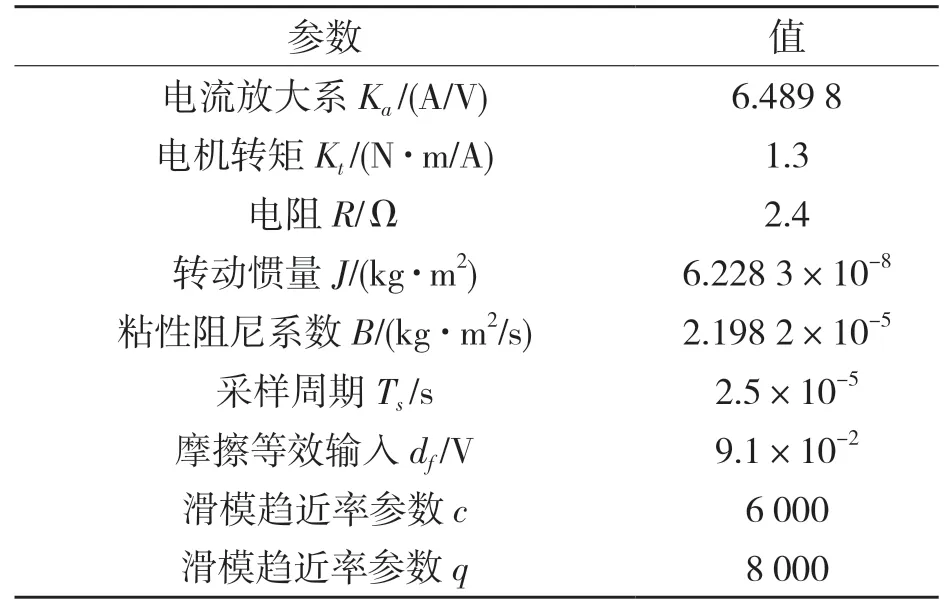
表1 仿真模型的參數(shù)表Tab.1 Parameters of simulation model
4 仿真與實驗
本文所選振鏡電機(jī)系統(tǒng)的性能指標(biāo)見表2。

表2 振鏡系統(tǒng)性能指標(biāo)表Tab.2 Performance indicators of galvanometer system
根據(jù)式(11)、式(16)、表1,在MATLAB中建立相應(yīng)振鏡系統(tǒng)控制模型并進(jìn)行仿真實驗,結(jié)果如圖2、圖3 所示。
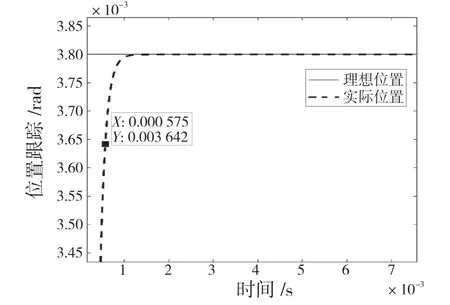
圖2 1%全行程階躍響應(yīng)Fig.2 1% full stroke step response
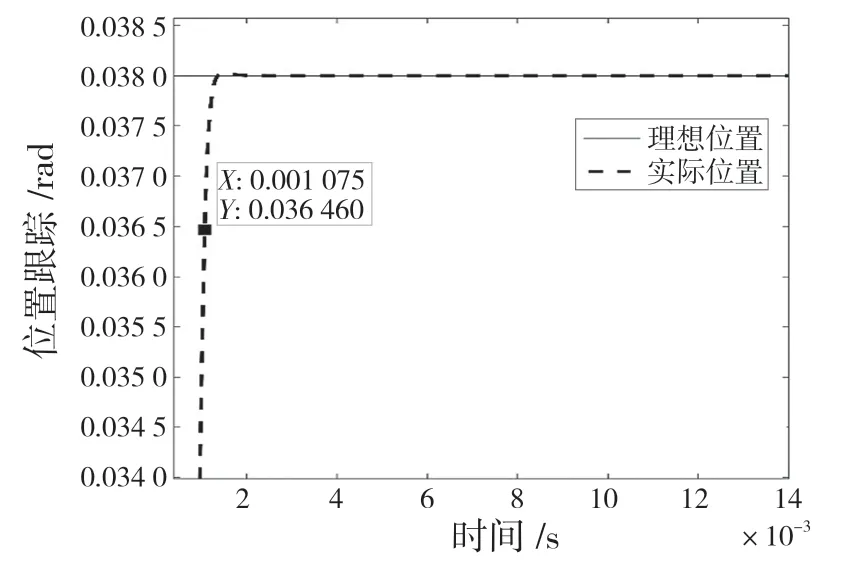
圖3 10%全行程階躍響應(yīng)Fig.3 10% full stroke step response
如圖2、圖3 所示,當(dāng)振鏡系統(tǒng)輸入為1%全行程時,階躍響應(yīng)為575 us(按階躍響應(yīng)95%標(biāo)準(zhǔn)),小于指標(biāo)值800 us,超調(diào)量小于3%;當(dāng)振鏡系統(tǒng)輸入為10%全行程時,階躍響應(yīng)1.075 ms(按階躍響應(yīng)95% 標(biāo)準(zhǔn)),小于指標(biāo)值2.5 ms,說明本文所設(shè)計的離散自適應(yīng)滑模控制器滿足振鏡系統(tǒng)的性能指標(biāo)。
如圖4所示,控制器增益值在起始階段較大,這一階段系統(tǒng)快速趨近至滑模面,到達(dá)滑模面后,增益值減小,有助于減小系統(tǒng)抖振。對比圖5 和圖6 滑模控制器的相軌跡圖可知,所設(shè)計的自適應(yīng)增益使得系統(tǒng)相軌跡在滑模面上的運(yùn)動更加平滑,動態(tài)品質(zhì)有明顯提高。
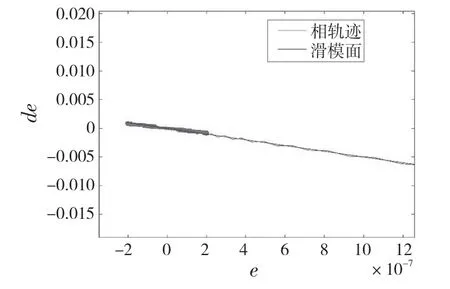
圖5 常量增益值系統(tǒng)相軌跡圖Fig.5 Constant gain value system phase trajectory
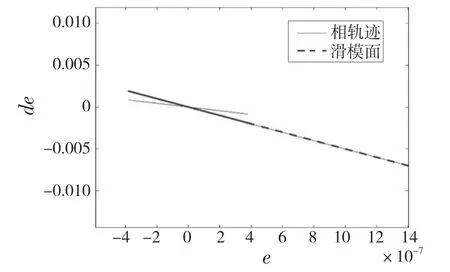
圖6 自適應(yīng)增益值系統(tǒng)相軌跡Fig.6 Adaptive gain value system phase trajectory
振鏡電機(jī)在實際工作時,位置曲線近似為三角函數(shù)(單一或組合)曲線,本文選取最簡單的正弦曲線作為輸入?yún)⒖夹盘枴H鐖D7 所示,振鏡系統(tǒng)在跟蹤正弦信號方面有良好的表現(xiàn),說明本文設(shè)計的離散滑模控制器性能穩(wěn)定可靠。

圖7 正弦信號位置跟蹤Fig.7 Sinusoidal signal position tracking
5 結(jié)語
本文針對離散振鏡系統(tǒng)提出了一種自適應(yīng)離散滑模控制方法并驗證了系統(tǒng)穩(wěn)定性。通過在線調(diào)節(jié)控制器自適應(yīng)增益,可使系統(tǒng)較快趨近滑模面,同時減少抖振,提高系統(tǒng)的運(yùn)動品質(zhì)。參數(shù)辨識得到振鏡系統(tǒng)的相關(guān)參數(shù)并結(jié)合仿真模型進(jìn)行實驗,有效地驗證了控制方法的動態(tài)和穩(wěn)態(tài)性能,能夠滿足振鏡系統(tǒng)在實際應(yīng)用中的性能。基于趨近率的離散滑模控制器結(jié)構(gòu)簡單易實現(xiàn),自適應(yīng)增益有利于系統(tǒng)動態(tài)性能的提升。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19