基于鳥巢結構的載人月球車車輪設計與性能分析
2021-12-28 08:24:34王婷王振軍
農業裝備與車輛工程 2021年12期
王婷,王振軍
(200093 上海市 上海理工大學 機械工程學院)
0 引言
月球環境惡劣,其重力約為地球的1/6,晝夜溫差大,月面受到太陽直接照射的極限溫度可達150 ℃,黑夜極限溫度可達-180 ℃[1]。月球表面地形復雜,有松軟的月壤、斜坡、小坑和火山玻璃等塊狀物體[2]。這些都要求在月球環境下運行的載人月球車應具有較好的移動性能和承載能力,能夠越過障礙物。
本文基于阿波羅月球車,提出了一種基于鳥巢結構的新型載人月球車輪。此載人月球車車輪輪轂與編織網外胎的改變,對減小車輪質量、減少仿真計算量有很大改善,為載人月球車車輪設計與性能仿真提供了參考。
1 載人月球車車輪設計
1.1 載人月球車車輪的功能要求和技術指標
結合探測任務要求和月面地形及空間環境條件,車輪需要滿足如下要求[3-5]:
(1)承載能力要求:自身重量、2 名宇航員以及月面活動需要的儀器設備;
(2)包絡尺寸約束:載人月球車展開時的外形尺寸應小于3.1 m ×2.1 m ×1.2 m;
(3)質量約束:車輪應盡可能輕量化;
(4)移動要求:應能夠翻越一定數值的凸起障礙,凹陷障礙物和斜坡;
(5)車輪材料要求:在月表環境下,車輪材料應具有良好的環境適應性。
1.2 載人月球車金屬車輪構型介紹
考慮載人月球車車輪的承載能力要求,本文提出的車輪直徑為800 mm,寬度為225 mm,車輪由輪轂、彈性限止器和編織網外胎組成,車輪的整體構型如圖1 所示。
1.2.1 輪轂
輪轂設計構型如圖2 所示。輪輻采用鳥巢結構,該結構不僅可以為車輪提供足夠的結構強度,還可以減輕輪輻質量,為了進一步實現輪轂輕量化,在輪輞處加入緊密的圓孔。
1.2.2 彈性限止器
彈性限止器主要在沖擊載荷下受力,為了增大彈性限止器的承力面積,將彈性限止器設計成U型,將36 個彈性限止器鉚接在輪轂上如圖3 所示。
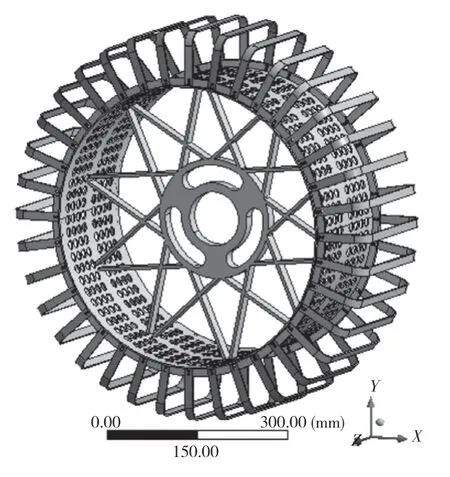
圖3 彈性限止器Fig.3 Elastic inner-frames
1.2.3 編織網外胎
為增大車輪牽引力,編織網外胎采用條狀薄片編織,與鋼絲編織的金屬網相比,薄片編織的金屬網更容易進行仿真計算,同時增大了接觸面積。編織網外胎結構如圖4 所示。
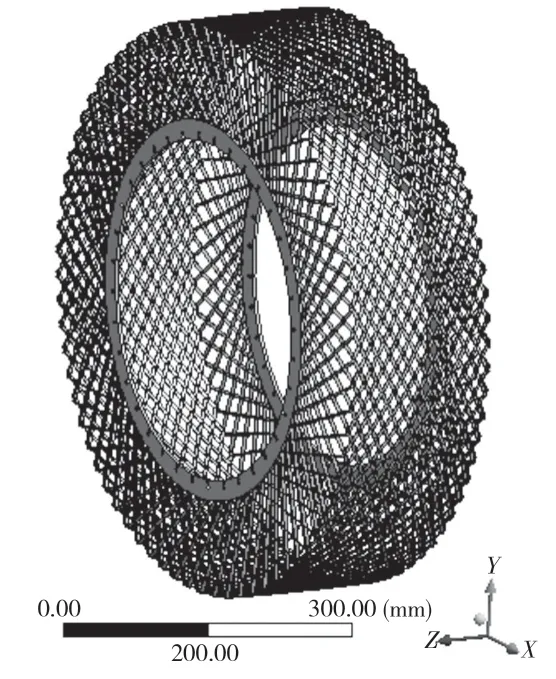
圖4 編織網外胎Fig.4 Sheet mesh carcass
1.3 載人月球車金屬車輪材料的選擇
月球表面晝夜溫差大,輻射強,一般材料在月球環境下很難保存,在這種環境下,金屬材料能滿足車輪運行所需的材料要求,金屬材料密度見表1[6]。本文選取材料密度小,強度高,高低溫條件下工作性能好的2Al2-CZ 硬質鋁合金材料作為輪轂與編織網外胎的主要材料。限止器是車輪受到極限沖擊狀態時主要的支承構件,因此本文選擇屈服強度更高的鈦合金作為限止器的主要材料。材料的屬性參數如表1 所示。
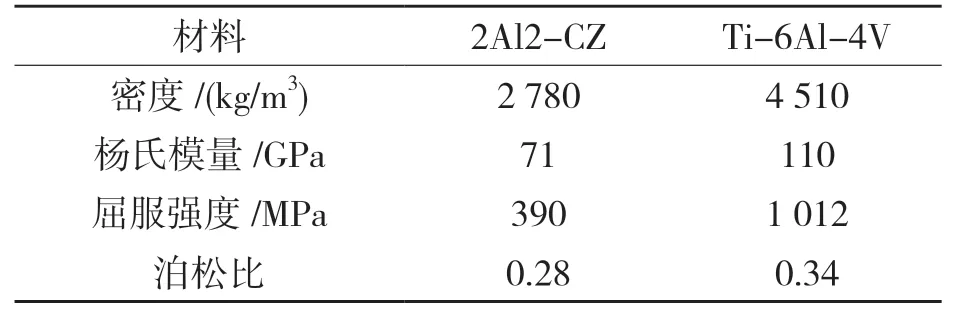
表1 車輪材料參數Tab.1 Material parameters of wheel
2 載人月球車車輪有限元分析
在ANSYS Workbench 中檢驗了車輪的各部件結構強度是否滿足要求。本文分析了以下兩種工況:(1)載人月球車滿載時,承載質量為700 kg,此時單輪承受的載荷約為285 N;(2)載人月球車受沖擊載荷時,此時單輪承受的沖擊載荷約為715 N。
2.1 輪轂有限元分析
在Workbench 中對輪轂進行固定與施力,將力施加在輪轂與車架接觸的1/3 軸面上,將正對施力軸面的2個彈性限止器與輪轂接觸的面固定。圖5 為車輪在兩種工況下的應力和變形分布圖。

圖5 輪轂有限元分析Fig.5 Static analysis results of hub
由有限元結果可知,輪轂在滿載與沖擊載荷下的最大應力分別為41.648,104.49 MPa,最大應力均小于材料屈服強度390 MPa且位于彈性限止器與輪轂鉚接的鉚接孔處。最大位移發生在輪轂上方,滿載與沖擊載荷下輪轂的最大變形量為0.157,0.395 mm,最大變形在彈性范圍內,輪轂的強度和剛度滿足設計要求。
2.2 彈性限止器有限元分析
彈性限止器在車輪受極限沖擊時對車輪起支承作用,將彈性限止器與輪轂接觸的面進行固定,在限止器頂部平面施加715 N 的沖擊載荷。有限元分析結果如圖6 所示。

圖6 彈性限止器有限元分析Fig.6 Static analysis results of elastic inner frame
由有限元結果分析可知,彈性限止器最大應力為752.81 MPa 且發生在圓弧倒角處,小于材料的屈服強度1 012 MPa;最大應變發生在沖擊載荷施加的平面上,最大應變為14.504 mm,屬于彈性變形,彈性限止器的強度和剛度滿足要求。
2.3 編織網外胎有限元分析
為方便對編織網外胎施力,在土壤與胎面接觸面加力,土壤與外胎裝配如圖7。

圖7 土壤與外胎面接觸模型Fig.7 Carcass-soil contact model
將方向向上的力施加在土壤面上,固定外胎與輪轂接觸的兩個面,編織網外胎在兩種工況下的有限元分析結果如圖8 所示。
由圖8 可知,滿載與沖擊載荷下編織網外胎的最大應力分別為107.2,268.94 MPa,兩種工況下的最大應力均小于材料的屈服強度,最大應力發生在外胎與地面接觸的面的轉折處。最大變形發生在編織網外胎與地面接觸的平面上,滿載與沖擊載荷下最大變形分別為0.387 3,0.971 mm,屬于彈性變形。編織網外胎的應力與應變均呈對稱分布,強度和剛度滿足要求。
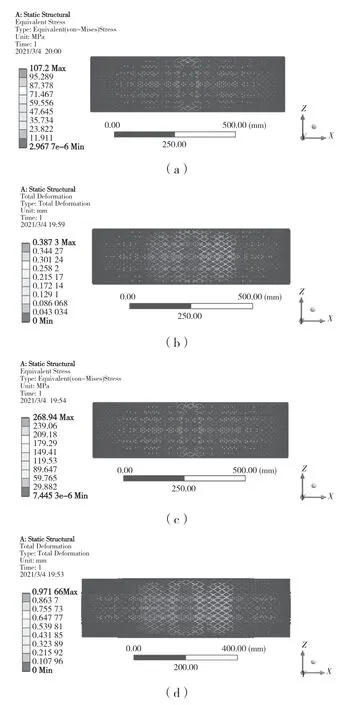
圖8 編織網外胎有限元分析Fig.8 Static analysis results of sheet mesh carcass
3 載人月球車車輪移動性能分析
3.1 地面模型與行駛工況的建立
月球表面布滿了大大小小的隕石撞擊坑,載人月球車的活動任務區域一般都在月海和高地地區。根據月球探測數據統計,月海區域相對較為平坦,最大坡度約為17°,大部分坡度在0~10°之間。高地區域坡度較大,最大坡度約為34°,大部分在0~23°之間。月球表面裸露著許多巖石和風化的碎塊,大多數巖石和碎塊直徑小于20 cm。為保證月球車在月海和高地完成探測任務,本文建立了長48.3 m,寬10 m 的路面,對路面環境設置以下3 種地形工況:(1)30 cm高的單邊和雙邊障礙;(2)40 cm 寬的壕溝;(3)20°與25°的斜坡。所建立的道路模型如圖9 所示。

圖9 道路模型Fig.9 Road model
將仿真環境設置為月面狀態,月球的重力加速度g=1.63 m/s2,月球表面大部分由月壤覆蓋,參考文獻[7],取靜摩擦系數為0.65。月球車保持滿載狀態M=700 kg。考慮綜合工況,取載人月球車平均運行車速9km/h 進行分析,將車輪相關尺寸代入進行計算,得到車輪角速度為360 °/s。
3.2 越障分析
3.2.1 單邊越障
載人月球車30 cm 單邊越障過程如圖10 所示。載人月球車車輪單邊越障結果顯示,當車輛的右前輪與障礙物接觸并跨越障礙時,左前輪跟著顛簸,右前車輪成功跨越障礙。右后輪跨越障礙時左后輪無顛簸現象,后輪成功跨越單邊障礙,由于后輪車速不同,車身發生偏移。仿真結果表明,載人月球車能滿足單邊越障的要求。
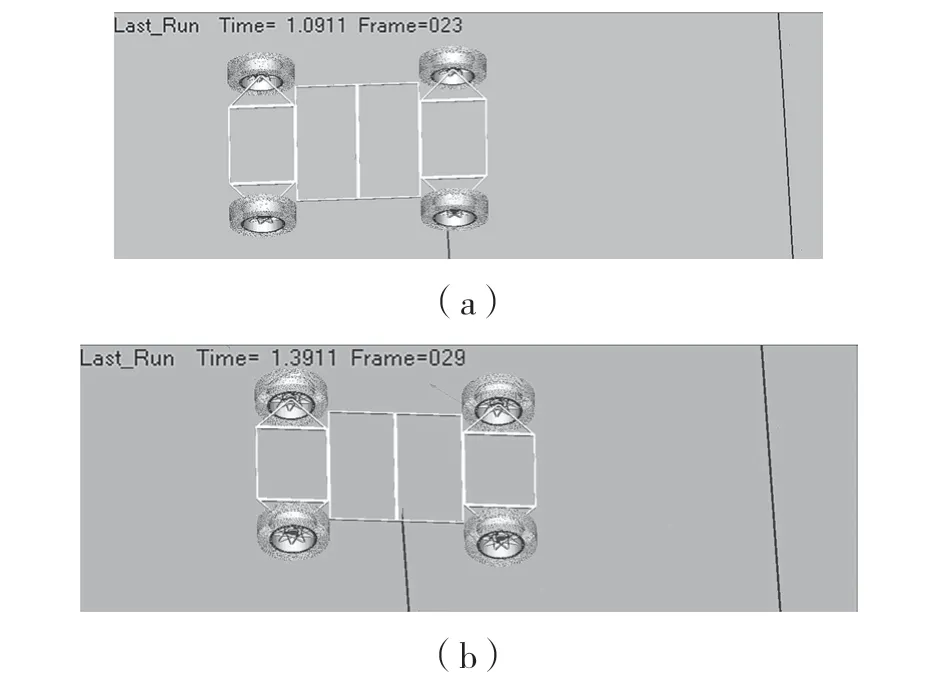
圖10 單邊越障Fig.10 Unilateral obstacle crossing
3.2.2 雙邊越障
圖11 所示為載人月球車車輪跨越30 cm 的雙邊越障的狀態。
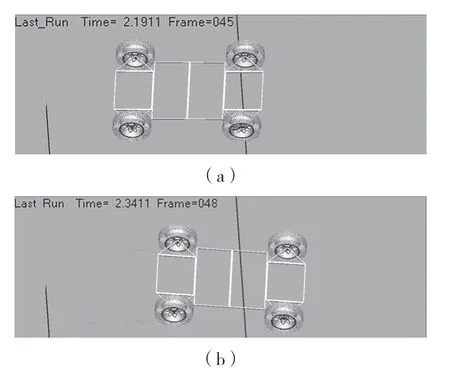
圖11 雙邊越障Fig.11 Bilateral obstacle crossing
載人月球車車輪雙邊越障結果顯示,車輪在跨越30 cm 的雙邊障礙時,由于車身偏移,左側前車輪率先接觸障礙物,帶動左后輪顛簸,隨后右側車輪也接觸障礙物,兩輪共同越過雙邊障礙,兩后輪也同時越過障礙,載人月球車滿足雙邊越障要求。
3.3 跨越壕溝分析
載人月球車跨越40 cm 寬的壕溝時的整體狀態如圖12 所示。
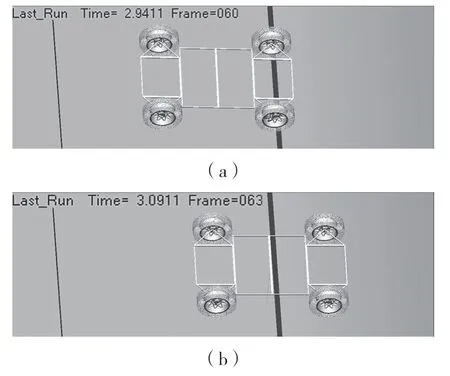
圖12 跨越壕溝Fig.12 Trench crossing
車輪跨越壕溝結果顯示,兩前輪與兩后輪均能順利跨越寬40 cm 的壕溝。載人月球車車輪有良好的跨越壕溝的能力。
3.4 爬坡分析
圖13 所示為載人月球車爬20°坡的位置狀態圖,仿真結果表明,載人月球車車輪順利地爬上了20 °的斜坡。
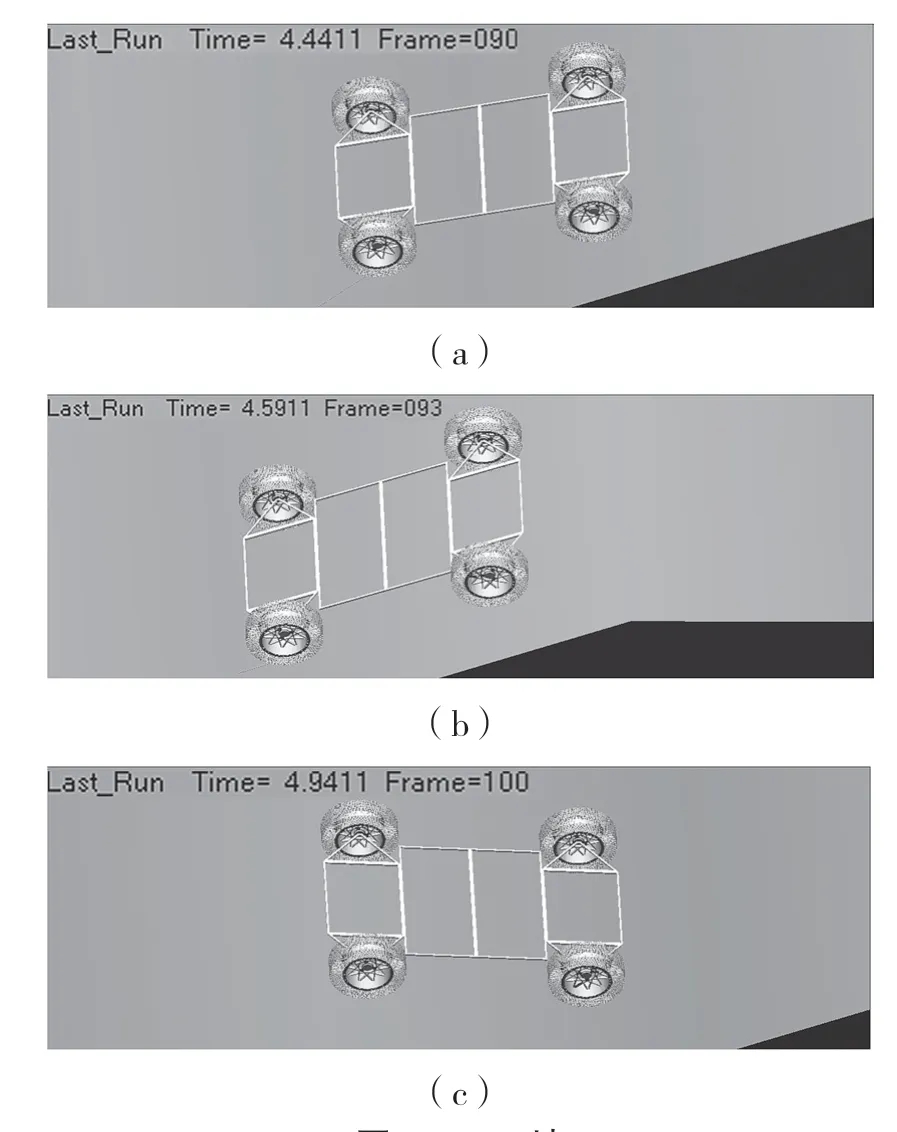
圖13 20°坡Fig.13 Slope with grade of 20°
圖14 為載人月球車爬25°坡的位置狀態。車輪能順利爬上25°斜坡,爬坡過程中未出現打滑現象,表明載人月球車滿足20°與25°的爬坡要求。

圖14 25°坡Fig.14 Slope with grade of 25°
3.5 車輪質心位移曲線
在ADAMS 軟件中將載人月球車車輪仿真結果輸出如圖15,分別表示車輪在建立的單邊障礙、雙邊越障、壕溝、20 °與25 °斜坡路面上運行時的質心位移情況。
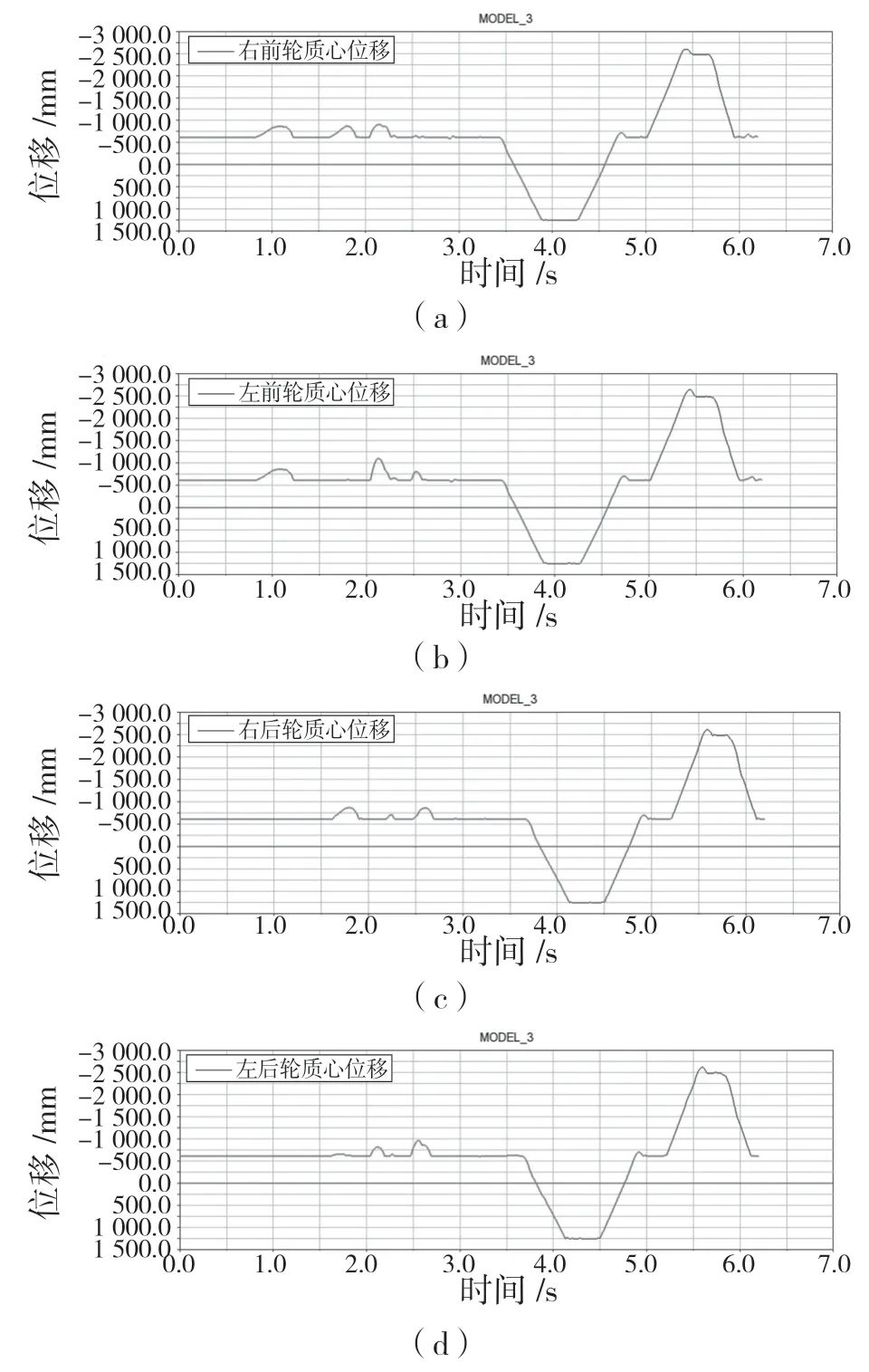
圖15 車輪質心位移曲線Fig.15 Centroid displacement of wheels
右前輪跨越單邊障礙時,左前輪跟著右前輪出現了明顯的顛簸,左右前輪質心都出現了波動;在右后輪跨越單邊障礙時,左后輪無顛簸,其質心無變化,右后輪質心出現波動,車輪順利跨越單邊障礙。
左前輪在跨越雙邊障礙時,質心出現2 次波動。第1 次為越障時的正常波動,第2 次為跨過障礙后顛簸產生的波動;兩后輪越障出現了2 次波動。左后輪第1 次為左前輪先接觸障礙帶動后輪顛簸,右后輪第1 次為左前輪率先落地引起右后輪顛簸,第2 次波動為正常越障引起的質心波動。
車輪跨越40 cm 寬的壕溝時質心出現輕微波動,順利跨越壕溝。車輪成功爬越20°和25°的斜坡后顛簸,質心產生波動。
從質心曲線可以看出,車輪能夠在崎嶇的路面上運行。
4 結論
(1)本文設計了一種基于鳥巢結構的載人月球車車輪,車輪由采用2Al-CZ 硬質鋁合金材料制成的輪轂與編織網外胎和采用Ti-6Al-4V 鈦合金材料制成的彈性限止器構成。
(2)對載人月球車車輪在滿載285 N 與沖擊載荷715 N 下進行靜力學分析。在滿載與沖擊載荷下,輪轂的最大應力分別為41.648,104.49 MPa,編織網外胎的最大應力分別為107.2,268.94 MPa,它們的最大應力均小于材料的屈服強度390 MPa。在沖擊載荷下,彈性限止器的最大應力小于材料的屈服強度1 012 MPa,為752.81 MPa。此載人月球車車輪的剛度和強度滿足要求。
(3)對載人月球車車輪進行了移動性能仿真,車輪成功越過了高30 cm 的單邊與雙邊障礙、寬40 cm 的壕溝、坡角為25°和30°的斜坡,車輪具有良好的移動性能。
猜你喜歡
作文周刊·小學一年級版(2025年8期)2025-04-08 00:00:00
環球時報(2022-11-03)2022-11-03 05:18:49
少兒科學周刊·兒童版(2022年10期)2022-06-27 16:36:06
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
少兒美術(快樂歷史地理)(2019年6期)2019-10-12 08:21:30
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
Coco薇(2017年7期)2017-07-21 07:16:04
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24