
基于MATLAB的五軸坡口切割機器人運動學(xué)分析與仿真
2021-12-29 07:19:32張雪健胡曉兵蔣從軍毛業(yè)兵
四川大學(xué)學(xué)報(自然科學(xué)版) 2021年6期
張雪健, 胡曉兵, 蔣從軍, 毛業(yè)兵
(1.四川大學(xué)機械工程學(xué)院, 成都 610065;2.宜賓四川大學(xué)產(chǎn)業(yè)技術(shù)研究院, 宜賓 644600;3.中國水電建設(shè)集團夾江水工機械有限公司, 樂山 614100)
工業(yè)機器人和人工智能技術(shù),作為第三次和第四次工業(yè)革命的中堅力量,其發(fā)展對于一個國家的制造業(yè)發(fā)展起著至關(guān)重要的作用[1].目前,工業(yè)機器人廣泛應(yīng)用于上下料、焊接、碼垛等機械作業(yè).在焊接作業(yè)的智能化和自動化改造中,坡口切割的自動化逐漸成為了一個發(fā)展的熱點.但國內(nèi)目前還沒有成熟的完全自主研發(fā)的坡口切割機器人.許多企業(yè)和高校都在這方面進行著努力和嘗試,并且許多團隊已經(jīng)有了一定程度上的技術(shù)上的突破[2].目前,國內(nèi)的坡口切割機器人的研究主要集中在三個方面,機器人視覺系統(tǒng)的研究,機器人控制系統(tǒng)的搭建和針對不同零件的焊接工藝研究.在機器人視覺系統(tǒng)的研究中,國內(nèi)高校和企業(yè)已有針對視覺技術(shù)進行了多方面的研究.例如哈爾濱工程大學(xué)的團隊根據(jù)機器人模型,對圖像拼接、輪廓提取進行了研究,然后根據(jù)歸一化鏈碼直方圖提出了一種新的輪廓匹配方法[3].北京石油化工學(xué)院的團隊對于復(fù)雜工況下機器人視覺引導(dǎo)系統(tǒng)的二維圖像拼接和三維點云拼接進行了研究.在機器人控制系統(tǒng)搭建的研究中[4],哈爾濱工程大學(xué)研發(fā)了一臺基于工業(yè)CCD和工業(yè)結(jié)構(gòu)光的五軸坡口切割機床[5].文獻[6]根據(jù)OTC AX-MV6機器人的機械結(jié)構(gòu)和生產(chǎn)需求設(shè)計了一個坡口切割工作站的控制系統(tǒng).在坡口機器人焊接工藝的研究中,哈爾濱理工大學(xué)的團隊針對于管狀零件的相貫線坡口切割原理和零件的切割作業(yè)運動學(xué)仿真進行了研究[7].而梁衛(wèi)等則是對于桁架臂相貫線坡口焊接進行了深入的研究[8].
在以上三個研究方向中,機器人控制系統(tǒng)的搭建和機械本體的運動學(xué)分析等相關(guān)研究相較于視覺系統(tǒng)和工藝研究相對較少,因此為了改變坡口切割作業(yè)的生產(chǎn)加工方式,本文設(shè)計了一種基于機器視覺的五軸坡口切割機器人.其可以根據(jù)視覺系統(tǒng),獲取零件尺寸和加工要求并生成零件加工輪廓[9],然后根據(jù)零件輪廓信息,生成機器人的末端操作器軌跡,進而操作機器人完成坡口切割作業(yè).為驗證設(shè)計的可行性,對五軸坡口切割機器人進行運動學(xué)分析.機器人的運動學(xué)分析[10-12]不僅是機器人動力學(xué)分析的基礎(chǔ),對于機器人運動空間、運動控制和軌跡規(guī)劃等問題的研究也提供了依據(jù).機器人的運動學(xué)分析主要對機器人進行正逆運動學(xué)分析,然后借助MATLAB軟件對機器人進行運動學(xué)建模,然后對機器人末端操作器的運動空間和末端軌跡進行仿真驗證.
本文的設(shè)計方案和實驗仿真主要有如下三個:(1) 機械結(jié)構(gòu)的設(shè)計的創(chuàng)新性.本文設(shè)計的坡口切割機器人為五軸直角坐標(biāo)式機器人下相較于傳統(tǒng)機器人有三個優(yōu)點:① 結(jié)構(gòu)簡單且運動學(xué)分析和動力學(xué)分析相對簡便;② 機器人的重復(fù)定位精度高;③ 控制方案相對簡便,本文設(shè)計的機器人為五軸四聯(lián)動式,即只有一個回轉(zhuǎn)關(guān)節(jié)和三個移動關(guān)節(jié)聯(lián)動.(2) 綜合MATLAB軟件相關(guān)功能和一些常用的仿真分析算法,為機器人進行不同方面的仿真分析,進而對坡口切割機器人進行可行性和合理性分析.(3) 采用MATLAB仿真圖的方式去驗證機械結(jié)構(gòu)設(shè)計的合理性,包括通過采用MATLAB機器人工具箱,對機器人的機械結(jié)構(gòu)進行仿真建模,驗證其是否滿足設(shè)計需求.
2 機器人結(jié)構(gòu)設(shè)計
在平板坡口切割作業(yè)過程中,為滿足機器人在三維工作空間內(nèi)對于零件的加工,首先需要對零件的加工位置進行準(zhǔn)確定位,然后再根據(jù)切割要求控制焊槍的姿態(tài),進而才可進行切割作業(yè).本文設(shè)計的坡口切割機器人系統(tǒng)包括機械本體和控制系統(tǒng)兩部分構(gòu)成.其中機械本體由X,Y,Z,U,V這5個運動關(guān)節(jié)和相應(yīng)的電機構(gòu)成.控制系統(tǒng)包括由圖像采集模塊、工程圖讀取模塊、圖像處理模塊、軌跡計算模塊、通訊模塊和運動控制模塊構(gòu)成的上位機模塊、由PLC控制單元和電路模塊構(gòu)成的下位機模塊和工業(yè)相機三部分構(gòu)成,如圖1所示.
在定位過程中,由于零件的尺寸不同,形狀多樣,厚度不一,因此采用X,Y,Z三軸的空間直角坐標(biāo)結(jié)構(gòu)對零件進行準(zhǔn)確的三維空間定位.此外由于零件尺寸不同且坡口切割角度不同,采用傳統(tǒng)的垂直向下的火焰槍結(jié)構(gòu)無法滿足多樣化的坡口切割作業(yè)要求,因此采用兩個回轉(zhuǎn)關(guān)節(jié)實現(xiàn)對末端火焰槍的位姿控制.其中一個回轉(zhuǎn)關(guān)節(jié)用于固定焊槍位置,保證其在切割過程中始終與零件輪廓相垂直;另一個回轉(zhuǎn)關(guān)節(jié)則依據(jù)坡口切割角度控制焊槍姿態(tài)使其滿足不同的切割作業(yè)要求.機器人的機械本體如圖2所示,采用直角坐標(biāo)形式[13],其中,X,Y,Z為移動關(guān)節(jié),U,V為回轉(zhuǎn)關(guān)節(jié).整體機器人采用串聯(lián)驅(qū)動結(jié)構(gòu),直線移動關(guān)節(jié)X,Y,Z可由關(guān)節(jié)驅(qū)動電機帶動絲桿沿各自導(dǎo)軌滑動,回轉(zhuǎn)關(guān)節(jié)U和V可由關(guān)節(jié)驅(qū)動電機帶動,分別實現(xiàn)沿末端操作器Z軸方向的360°回轉(zhuǎn)運動和X軸方向的90°擺動運動.

圖1 機器人控制系統(tǒng)圖Fig.1 Control system scheme of five axis groove cutting robot
2.2 機器人末端操作器位姿設(shè)計
坡口切割機器人一般應(yīng)用于平板類零件的坡口切割.因坡口切割零件的尺寸不同、坡口切割角度不同,末端火焰槍也需要根據(jù)不同的作業(yè)要求進
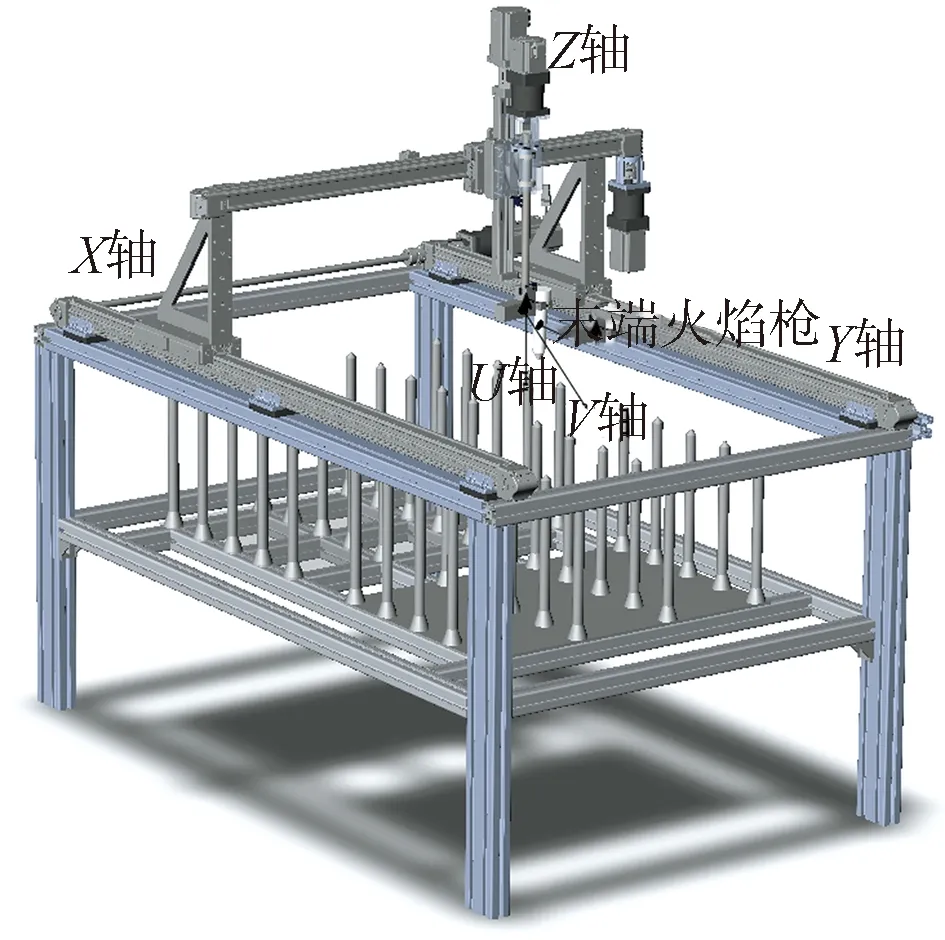
圖2 機器人實驗臺模型
行調(diào)整.切割作業(yè)過程中必須保證火焰槍時刻與零件輪廓相垂直,坡口切割形狀由末端火焰槍姿態(tài)決定.如圖3所示,末端火焰槍在零件平面的投影需要與零件當(dāng)前軌跡位置相切,即與當(dāng)前位置的法線重合.
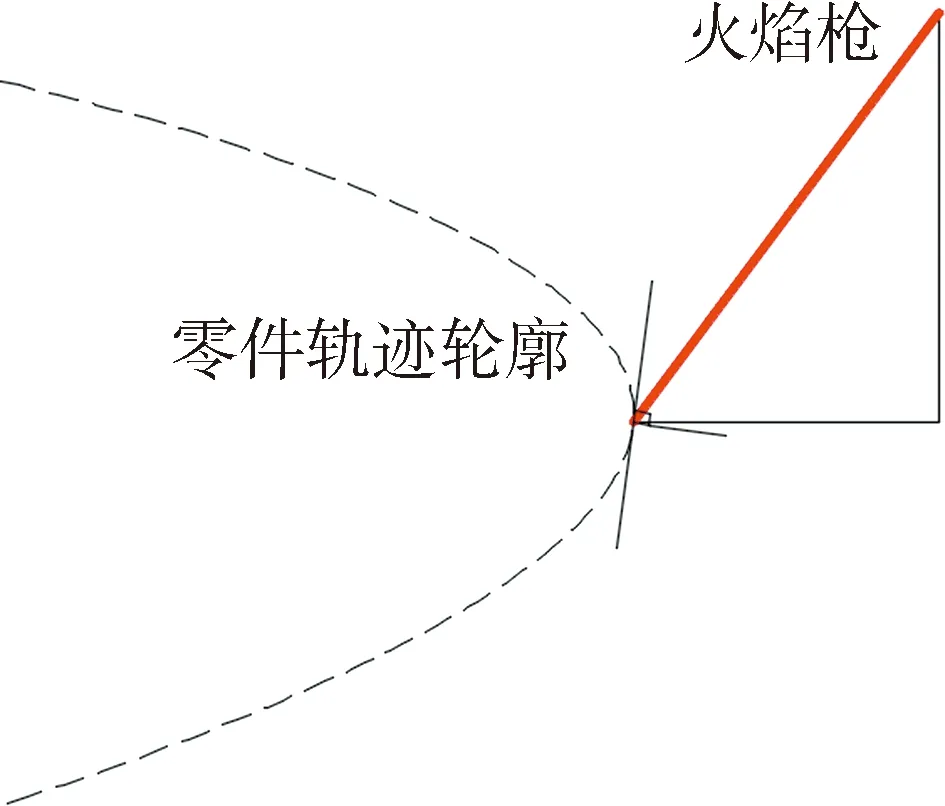
圖3 機器人末端火焰槍與零件輪廓姿態(tài)關(guān)系圖
3 機器人運動學(xué)分析
對坡口切割機器人的運動學(xué)分析主要分為對各運動軸的正逆運動學(xué)分析和對機器人末端火焰槍的運動與位姿分析.
3.1 機器人正運動學(xué)分析
五軸坡口切割機器人的正運動學(xué)分析,首先根據(jù)機器人機械本體模型圖求出機器人的DH參數(shù)表,畫出機器人D-H坐標(biāo)簡圖,然后根據(jù)DH參數(shù)表獲取關(guān)節(jié)變換矩陣.準(zhǔn)確描述機器人位置和姿態(tài)是對機器人進行運動分析的基礎(chǔ),本文采用改進的DH參數(shù)法[14],對機器人機械本體模型進行簡化,建立空間直角形串聯(lián)機器人的DH坐標(biāo)簡圖(圖4),然后根據(jù)對機械本體的測量和計算,得到五軸坡口切割機器人的DH參數(shù)表(表1).

表1 機器人DH參數(shù)表
表1中,θi為軸Xi-1和Xi之間的夾角;di為Oi′沿Zi-1的坐標(biāo);ai為Oi′和Oi之間的距離;αi為軸Xi-1和Xi之間的夾角.為了簡化計算,將世界坐標(biāo)系與基坐標(biāo)系重合,設(shè)為O0-X0Y0Z0.對DH參數(shù)表需要說明,因機器人Y軸與X軸不是在同一水平面內(nèi),因此以連桿2的a2的數(shù)值來近似處理.此外,通過對于機械本體的實際測量,對機器人DH參數(shù)進行一定的補償,即offset欄.
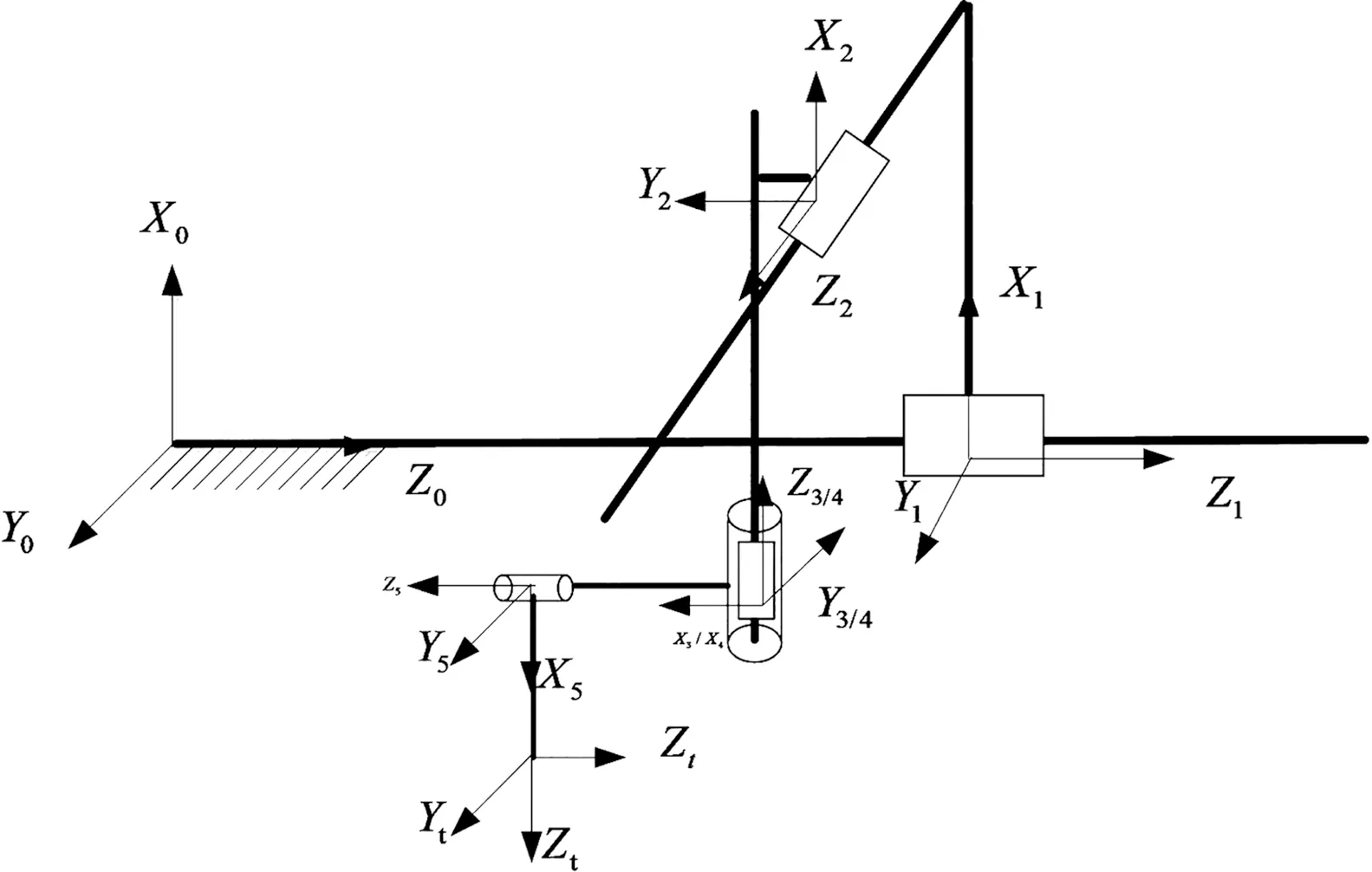
圖4 機器人DH坐標(biāo)簡圖Fig.4 DH coordinate sketch of robot
(1)
相鄰兩個關(guān)節(jié)的轉(zhuǎn)換矩陣滿足關(guān)系式(2).
(2)
因此,可以推出由基坐標(biāo)系到末端操作器坐標(biāo)系之間的坐標(biāo)轉(zhuǎn)換矩陣為
(3)
nx=-cosθ4sinθ5
ny=sinθ4sinθ5
nz=-cosθ5
ox=-sinθ4
oy=cosθ4
oz=0
ax=cosθ4cosθ5
ay=sinθ4cosθ5
az=-sinθ5
dx=d1-46.5sinθ4-100cosθ4sinθ5-320.3
dy=46.5cosθ4-d2-100sinθ4sinθ5
dz=d3-100cosθ5-191.1
(4)
即可得五軸坡口切割機器人末端操作器位姿矩陣:
(5)
3.2 機器人逆運動學(xué)分析
θ4=u-π/2
(6)
θ5=v
(7)
求得θ4和θ5表達式后,帶回式(4)中,可得出d1,d2,d3,即
3.3 坡口機器人末端火焰槍分析
對機器人的末端火焰槍的運動學(xué)分析主要分為角度分析和距離分析兩部分.(1) 角度分析.由于本文設(shè)計的坡口切割機器人只針對于平板類零件的切割,即只會存在一維的末端火焰槍位姿變化,因此末端火焰槍的位姿可以通過初始設(shè)定保證.為了簡化機器人運動方案,本文設(shè)計的機器人為五軸四聯(lián)動式機器人,即有一軸不參加機器人的聯(lián)動運動,控制末端火焰槍位姿的V軸不隨末端火焰槍的移動而移動,時刻保證末端火焰槍與待切割零件夾角為v.在一般的批量加工過程中,坡口切割角度設(shè)置為45°即可.(2) 距離分析.火焰槍與代加工零件之間的距離會影響末端火焰槍的焊縫補償、預(yù)熱時間、氧氣壓力、乙炔壓力等切割參數(shù).由于本文設(shè)計的坡口切割機器人只針對于平板類零件的切割,因此對坡口切割機器人末端火焰槍而言,它與代加工零件加工表面的距離是一定的.因此,我們可以將這個定值距離在機器人結(jié)構(gòu)分析中進行補償,即將其設(shè)置為機器人的固定參數(shù),從而不需要對其進行實時設(shè)定.
3.4 坡口機器人軌跡規(guī)劃分析
考慮到本文只針對于平板類零件的坡口切割,因此本文設(shè)計的坡口切割機器人不需要考慮三維運動學(xué)軌跡分析,其運動軌跡完全可以由軌跡點進行二維量化.機器人軌跡規(guī)劃的軌跡插值方案只需要采用五次多項式插值進行二維插值運算.對于某種代加工零件需要進行兩段不同切割方案,不需要考慮軌跡過渡.因為坡口切割一般為焊接的前置工藝,對于平板類零件而言,其焊接表面均為平面,不存在三維曲面.因此,不同的切割軌跡不需要考慮過渡軌跡,可以按照兩部分切割進行.此外,平面類零件的坡口切割末端火焰槍的運動只由兩個維度的運動合成而來,因此切割速度的控制可以通過速度分解.將其分解為平面兩個軸的速度,進而可以通過兩個關(guān)節(jié)處關(guān)節(jié)電機的驅(qū)動來控制機器人的速度.
4 機器人MATLAB運動學(xué)仿真
4.1 機器人運動模型仿真
由上述機器人正逆運動學(xué)分析,利用MATLAB軟件的機器人工具箱建立五軸坡口切割機器人的仿真模型[15].利用此仿真模型,可以進行機器人軌跡控制算法的設(shè)計和對正逆運動學(xué)的驗證.
由表1的機器人DH參數(shù),利用MATLAB機器人工具箱中的Link、SerialLink、fkine等函數(shù),獲得機器人的運動學(xué)仿真模型[16](如圖5).
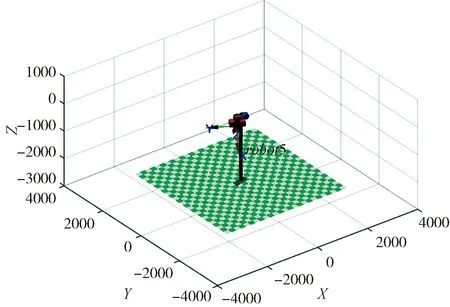
圖5 機器人運動學(xué)模型簡圖Fig.5 Sketch of robot kinematics model
4.2 機器人末端操作器工作空間仿真
五軸坡口切割機器人的坡口切割作業(yè)有一定的工作空間要求,因此需要對坡口切割機器人進行工作空間仿真[17-18]以確定可以由機器人進行切割加工零件的尺寸范圍.本文采用蒙特卡洛隨機數(shù)算法對末端火焰槍運動空間,即末端操作器工作空間求解.該算法是一種通過隨機概率來解決問題的數(shù)值方法,可以實現(xiàn)運動空間的數(shù)字化近似,常用于多關(guān)節(jié)機器人工作空間的求解.
本文利用MATLAB軟件進行編程,設(shè)置隨機數(shù)量為N=10 000,然后獲得機器人末端操作器工作空間仿真如圖6所示.
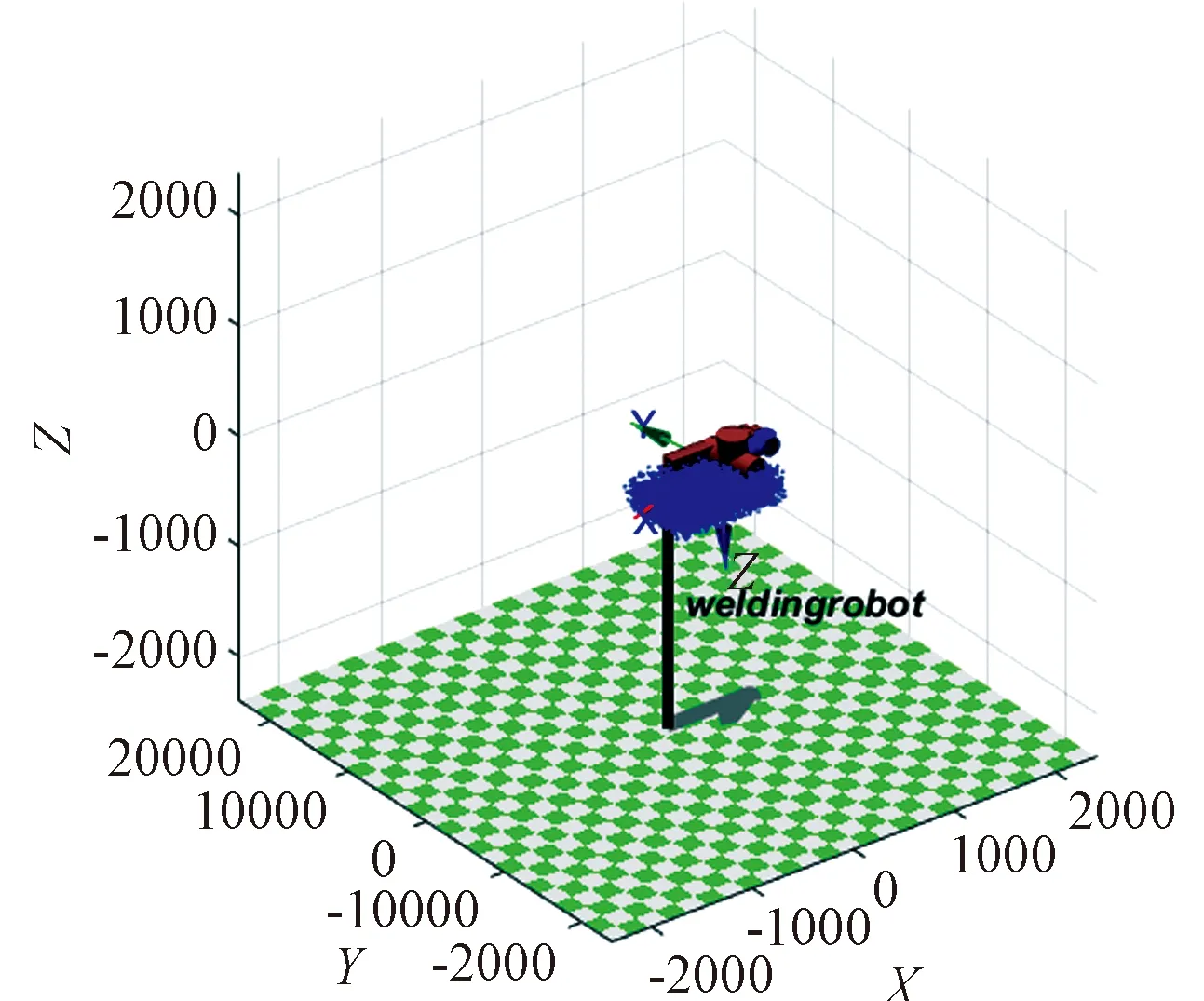
圖6 機器人末端操作器工作空間仿真圖
4.3 機器人末端操作器軌跡仿真
針對不同的零件,需要設(shè)計不同的末端操作器運動軌跡.在坡口切割過程中,為保證坡口切割質(zhì)量,需要保證機器人各關(guān)節(jié)電機的運動的平穩(wěn)性與準(zhǔn)確性.因此末端操作器軌跡設(shè)計是否合理,就取決于末端操作器軌跡路徑點集的選取.五軸坡口切割機器人的末端操作器軌跡規(guī)劃[19-20]是以機器人視覺模塊生成的零件輪廓點集為路徑進行規(guī)劃和執(zhí)行的.軌跡規(guī)劃的目的是對預(yù)定路徑的設(shè)計,包括起終點之間的路徑點的選擇以及各段路徑的規(guī)劃,保證機器人可以在全段路徑中均可以平穩(wěn)運行,無加速度和速度的突變.
平板類零件的末端火焰槍軌跡路線為一條直線.因此對于機器人末端操作器直線類的軌跡規(guī)劃問題,無論是在笛卡爾空間還是在關(guān)節(jié)空間,規(guī)劃出的運動曲線是相同的一條直線,如圖7所示.
雖然關(guān)節(jié)空間和笛卡爾空間內(nèi)的軌跡規(guī)劃原理相同,但是關(guān)節(jié)空間的規(guī)劃需要對每個關(guān)節(jié)就行規(guī)劃,計算每個關(guān)節(jié)的插補點.而笛卡爾規(guī)劃是在笛卡爾空間規(guī)劃末端軌跡,其只針對于末端操作器進行規(guī)劃,然后再去逆解每個插補點,計算對應(yīng)的每個關(guān)節(jié)的角度.由于規(guī)劃的軌跡為直線類型,因此求逆解的計算量相較于對每個關(guān)節(jié)進行規(guī)劃分析的計算量少,且末端操作器的五次插值運算簡便,可以實現(xiàn)很好的仿真效果.因此本文只在笛卡爾空間內(nèi)部進行規(guī)劃和仿真分析,采用MATLAB軟件配套的五次多項式軌跡插值jtraj函數(shù)對五軸坡口切割機器人軌跡進行笛卡爾空間內(nèi)運動學(xué)仿真.
設(shè)定需要切割的零件為700 mm×400 mm尺寸的厚度均勻的平板零件(零件一端厚度50 mm,另一端厚度100 mm),坡口角度v=π/4.根據(jù)機器人機架和零件的相對位置,設(shè)定相對坐標(biāo)確定零件加工的坡口加工位置,如圖8所示.設(shè)定零件軌跡切割軌跡路徑點集為
qA=[0,0,0];qB=[100,100,50];
qC=[800,100,50];qD=[800,500,50];
qE=[100,500,50].
故根據(jù)零件坡口切割要求,可以規(guī)劃出不同的零件切割軌跡.零件的切割軌跡不同,其切割速率、切割精度和切割破壞性不同.我們可對不同的切割方案進行仿真實驗比較,從而選出一個合理方案. 利用MATLAB進行編程,設(shè)定時間與步長,然后對可獲取的軌跡進行仿真.
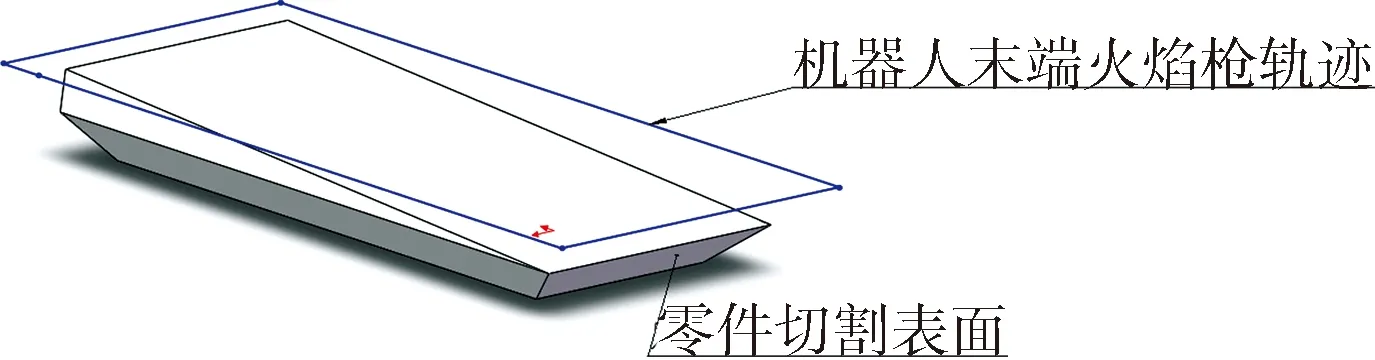
圖7 機器人末端火焰槍軌跡示意圖
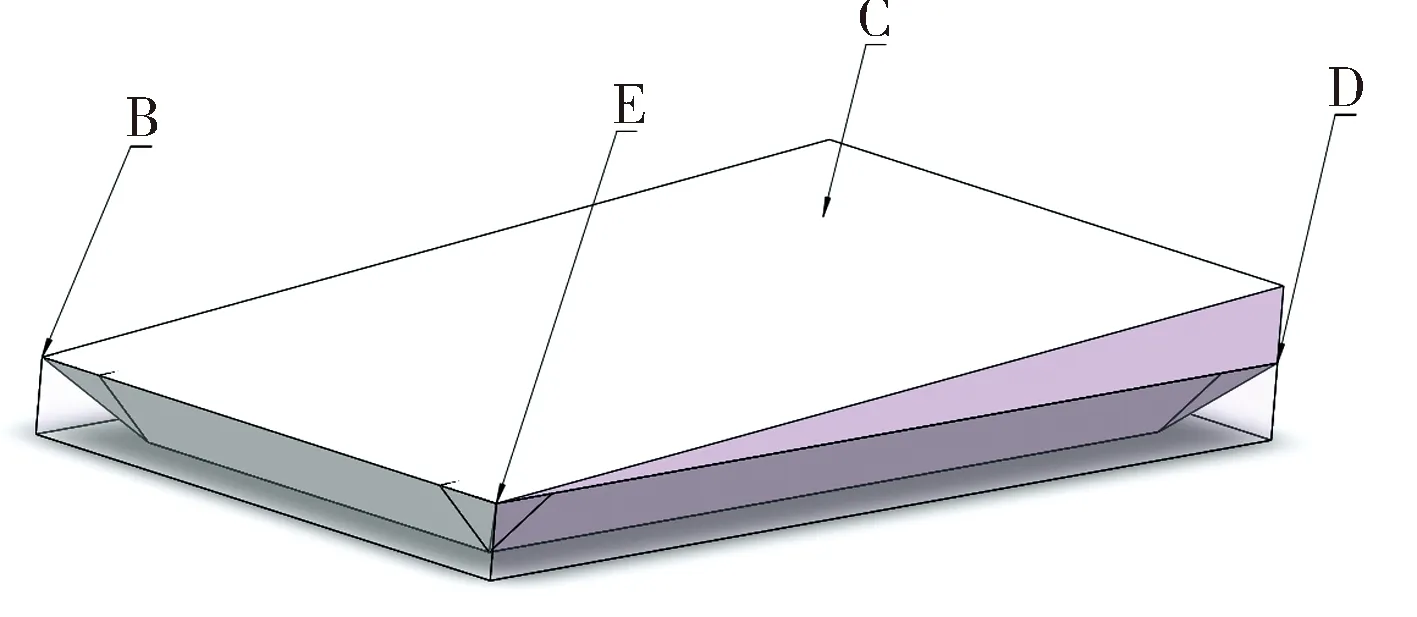
圖8 零件切割示意圖Fig.8 Schematic diagram of part cutting
方案1的零件規(guī)劃路徑為:
qA=[0,0,0,0,0]→
qB1=[100,100,50,pi/3,pi/4]→
qC1=[800,100,50,pi/3,pi/4]→
qC2=[800,100,50,5pi/6,pi/4]→
qD1=[800,500,50,5pi/6,pi/4]→
qD2=[800,500,50,4pi/3,pi/4]→
qE1=[100,500,50,4pi/3,pi/4]→
qE2=[100,500,50,11pi/6,pi/4]→
qB2=[100,100,50,11pi/6,pi/4]→
qA=[0,0,0,0,0].
方案2的零件規(guī)劃路徑為:
qA=[0,0,0,0,0]→qC1=
[800,100,50,pi/3,pi/4]→
qB1=[100,100,50,pi/3,pi/4]→
qB2=[100,100,50,11pi/6,pi/4]→
qE2=[100,500,50,11pi/6,pi/4]→
qE1=[100,500,50,4pi/3,pi/4]→
qD2=[800,500,50,4pi/3,pi/4]→
qD1=[800,500,50,5pi/6,pi/4]→
qC2=[800,100,50,5pi/6,pi/4]→
qA=[0,0,0,0,0].
方案1的機器人末端操作器軌跡仿真如圖9所示,機器人各關(guān)節(jié)運動曲線如圖10所示.方案2的機器人末端操作器軌跡仿真如圖11所示,機器人各關(guān)節(jié)運動曲線如圖12所示.
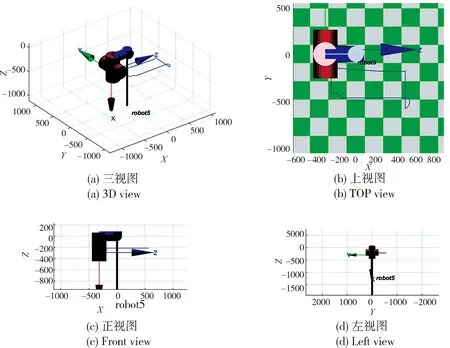
圖9 機器人末端軌跡仿真(方案1)Fig.9 Simulation of robot end trajectory(scheme 1)

圖10 機器人各點之間各關(guān)節(jié)運動曲線圖(方案1)Fig.10 Motion curve of each joint between the robot points (scheme 1)
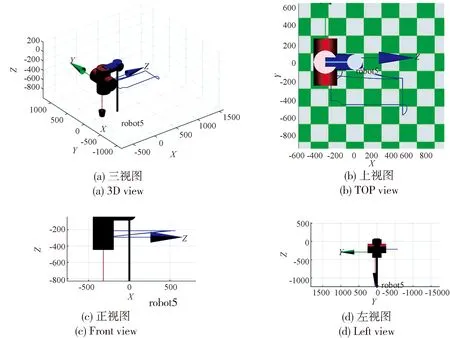
圖11 機器人末端軌跡仿真(方案2)Fig.11 Simulation of robot end trajectory (scheme 2)
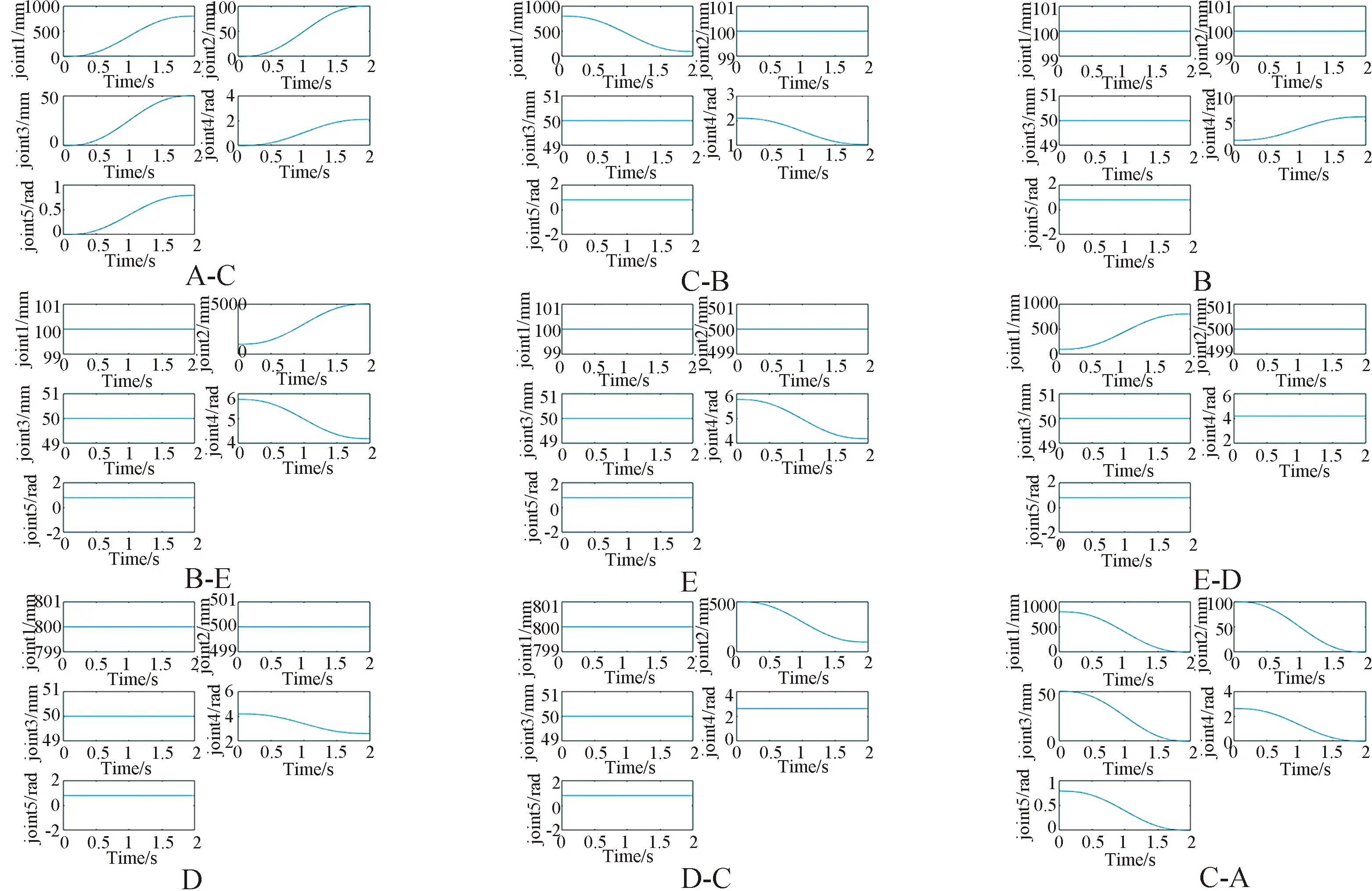
圖12 機器人各點之間各關(guān)節(jié)運動曲線圖(方案2)Fig.12 Motion curve of each joint between the robot points (scheme 2)
通過對方案1和方案2中機器人末端操作器的軌跡生成和機器人各關(guān)節(jié)的運動曲線的分析可知,兩個方案的軌跡規(guī)劃都可達到機器人末端操作器運動軌跡準(zhǔn)確、各點處機器人各關(guān)節(jié)運動平穩(wěn)和無速度突變的要求.通過方案2的運動仿真圖和實際加工要求可知,方案2存在一些問題.首先方案2中坡口切割初始點為C點,C點與A點的距離較B點與A點之間的距離遠,當(dāng)火焰槍由零位運轉(zhuǎn)到初始位置,方案2較方案1的路徑較長,且由于C不是零件的端點,因此在實際加工的過程中,對于初始點的切割定位會較方案1誤差大.其次由于在坡口切割過程中初始切割會對零件造成一定的破壞,方案1 中初始位置B點為零件端點,破壞性較小,而方案2初始點C為零件中部,相較于方案1,可能會對零件造成損壞.因此通過仿真實驗推定,方案1設(shè)計的零件切割路徑點集較為合理,驗證了本文設(shè)計的機器人運動軌跡規(guī)劃的合理性.
5 結(jié) 論
對于五軸坡口切割機器人的運動學(xué)仿真,本文根據(jù)坡口作業(yè)要求進行了坡口切割機器人的結(jié)構(gòu)設(shè)計,根據(jù)機械結(jié)構(gòu)建立了機器人的D-H參數(shù)坐標(biāo)系,推導(dǎo)了其正逆運動學(xué)模型,通過MATLAB數(shù)值計算與仿真,驗證了設(shè)計的機器人模型否可以滿足坡口切割的加工要求;采用蒙特卡洛隨機數(shù)算法生成機器人末端操作器工作空間,模擬出了機器人末端操作器的運動區(qū)域;采用五次多項式差值算法,實現(xiàn)了末端操作器的軌跡規(guī)劃,驗證了不同方案下機器人末端操作器軌跡路徑點集選取的可行性,對機器人末端軌跡規(guī)劃進行了一定的優(yōu)化.通過實驗仿真,為五軸坡口切割機器人的實際軌跡規(guī)劃提供了理論支撐,為以后的動力學(xué)仿真與控制算法研究奠定了基礎(chǔ).
猜你喜歡
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
公民與法治(2020年11期)2020-07-25 02:02:06
電子制作(2018年18期)2018-11-14 01:48:24
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
