基于動態(tài)參數(shù)濾波的微電網(wǎng)逆變器負(fù)序功率分配策略
2021-12-30 01:54:48王光楠文傳博
上海電機(jī)學(xué)院學(xué)報 2021年6期
王光楠,文傳博
(上海電機(jī)學(xué)院電氣學(xué)院,上海201306)
微電網(wǎng)因清潔節(jié)能、電能傳輸損耗小、構(gòu)造簡單等優(yōu)點(diǎn)而得到廣泛應(yīng)用[1]。通常情況下,微電網(wǎng)連接在大電力系統(tǒng)中,通過線路向負(fù)荷傳輸電能。當(dāng)故障發(fā)生時,靜態(tài)開關(guān)切斷,微電網(wǎng)由并網(wǎng)運(yùn)行轉(zhuǎn)至孤島運(yùn)行模式。網(wǎng)絡(luò)中各并聯(lián)逆變器需要時刻調(diào)整電壓及頻率,以維持系統(tǒng)正常、安全、可靠運(yùn)行[2-3]。
下垂控制因無需通信、自治度高,被廣泛應(yīng)用于逆變器的控制。但由于線路阻抗不同的原因?qū)е赂髂孀兤鲉卧敵龉β什荒艿玫胶侠矸峙洌虼耍鑼ο麓箍刂七M(jìn)行改進(jìn)[4-5]。文獻(xiàn)[6]提出了基于逐次逼近的自適應(yīng)虛擬阻抗方法,通過在下垂控制與改進(jìn)控制策略間設(shè)置開關(guān)來回切換,最終使逆變器輸出無功功率得到合理分配,但調(diào)節(jié)時間較長,在實(shí)際工程中難以應(yīng)用。文獻(xiàn)[7]通過交流小信號注入的方法解決了現(xiàn)有控制策略的弊端及功率分配問題,但交流信號提取的精度會受到系統(tǒng)中諧波的影響。文獻(xiàn)[8]利用功率耦合控制策略,實(shí)現(xiàn)了逆變器輸出有功、無功功率的合理分配,但未考慮負(fù)荷突變引起的系統(tǒng)電壓、頻率波動問題。文獻(xiàn)[9-10]改進(jìn)了有功功率控制環(huán),提升了系統(tǒng)的動態(tài)性能,但未對無功功率控制環(huán)進(jìn)行分析,且無功功率控制環(huán)的改進(jìn)策略可能會影響功率調(diào)節(jié)的速度。
以上文獻(xiàn)僅針對負(fù)載三相平衡的運(yùn)行工況進(jìn)行分析與改進(jìn),而系統(tǒng)實(shí)際運(yùn)行中存在大量的不平衡負(fù)荷,使流過線路的電流出現(xiàn)負(fù)序分量。因此,如何對負(fù)序功率、電流進(jìn)行合理分配成為一個研究熱點(diǎn)。文獻(xiàn)[11]將小信號注入法運(yùn)用到不平衡及非線性負(fù)荷工況中,提高了負(fù)序及諧波功率的分配精度,其弊端與文獻(xiàn)[7]相同。文獻(xiàn)[12]利用功率耦合的方法,實(shí)現(xiàn)了負(fù)序功率的合理分配,但未考慮系統(tǒng)的頻率擾動問題。文獻(xiàn)[13]利用自適應(yīng)虛擬電阻控制策略,減小了負(fù)序功率的分配誤差,但虛擬電阻會帶來系統(tǒng)額外的電壓降落。文獻(xiàn)[14]設(shè)計(jì)了負(fù)序的虛擬阻抗,減小了各線路阻抗差異,提高了負(fù)序電流的均分精度,但虛擬阻抗的設(shè)計(jì)需要線路阻抗信息,在實(shí)際工程應(yīng)用中很難實(shí)現(xiàn)。
針對負(fù)序功率的分配問題,本文提出了以動態(tài)參數(shù)濾波為基礎(chǔ)的功率耦合控制策略(以下簡稱改進(jìn)控制策略)。首先,構(gòu)造正序有功功率的自適應(yīng)虛擬阻抗,并負(fù)序功率信息注入頻率控制環(huán)中,穩(wěn)態(tài)時實(shí)現(xiàn)負(fù)序功率的合理分配;其次,考慮到負(fù)序功率注入對系統(tǒng)頻率質(zhì)量的影響,本文通過動態(tài)參數(shù)濾波對控制策略進(jìn)行進(jìn)一步改進(jìn),提高了系統(tǒng)頻率的質(zhì)量,并加快了負(fù)序功率的調(diào)節(jié)速度;最后,通過Simulink仿真實(shí)驗(yàn)驗(yàn)證了該改進(jìn)控制策略的可行性和有效性。
1 功率分配原則
微電網(wǎng)結(jié)構(gòu)如圖1所示,各直流電源通過逆變器、LC濾波電路、輸電線路,向公共母線上的負(fù)荷提供電能,本地控制器實(shí)時采集逆變器輸出量,實(shí)現(xiàn)逆變器的反饋閉環(huán)控制,增強(qiáng)系統(tǒng)運(yùn)行的穩(wěn)定性。圖中,iL1、uC1與iLn、uCn分別為第1個逆變器與第n個逆變器所對應(yīng)的電感電流與電容電壓。

圖1 微電網(wǎng)結(jié)構(gòu)
1.1 三相平衡負(fù)荷的功率分配原則
微電網(wǎng)等效電路如圖2所示。圖中,Ui(i=1,2)為逆變器輸出電壓的幅值;φi(i=1,2)為逆變器輸出電壓的相位;U0為母線電壓(設(shè)其電位為參考電位);Z1、Z2分別為逆變器1、逆變器2所對應(yīng)的線路阻抗;Zload為負(fù)載阻抗。由于三相對稱電壓作用于三相對稱負(fù)荷,故系統(tǒng)中只有正序分量的存在。

圖2 微電網(wǎng)等效電路
由圖2可得逆變器輸出有功、無功功率(以阻抗呈現(xiàn)感性為例)分別為

式中:Xi(i=1,2)為饋線感抗。
由于φi與Pi、Ui與Qi呈正相關(guān)關(guān)系,而下垂控制的本質(zhì)為反向調(diào)節(jié)逆變器輸出功率,使系統(tǒng)形成負(fù)反饋調(diào)節(jié)機(jī)制,因此下垂控制可表示為

式中:fi為系統(tǒng)頻率;f*、U*分別為額定頻率與額定電壓;mi、ni分別為各逆變器所對應(yīng)的有功、無功功率的下垂系數(shù);i=1,2。
由于系統(tǒng)頻率為全局變量,逆變器輸出電壓為局部變量,根據(jù)式(2),有

1.2 負(fù)序功率分配原則
負(fù)序等效電路如圖3所示。圖中,不平衡負(fù)荷被等效為電流源向系統(tǒng)注入負(fù)序電流Ineg,Zneg1、Zneg2分別為逆變器1、逆變器2所對應(yīng)的負(fù)序阻抗。
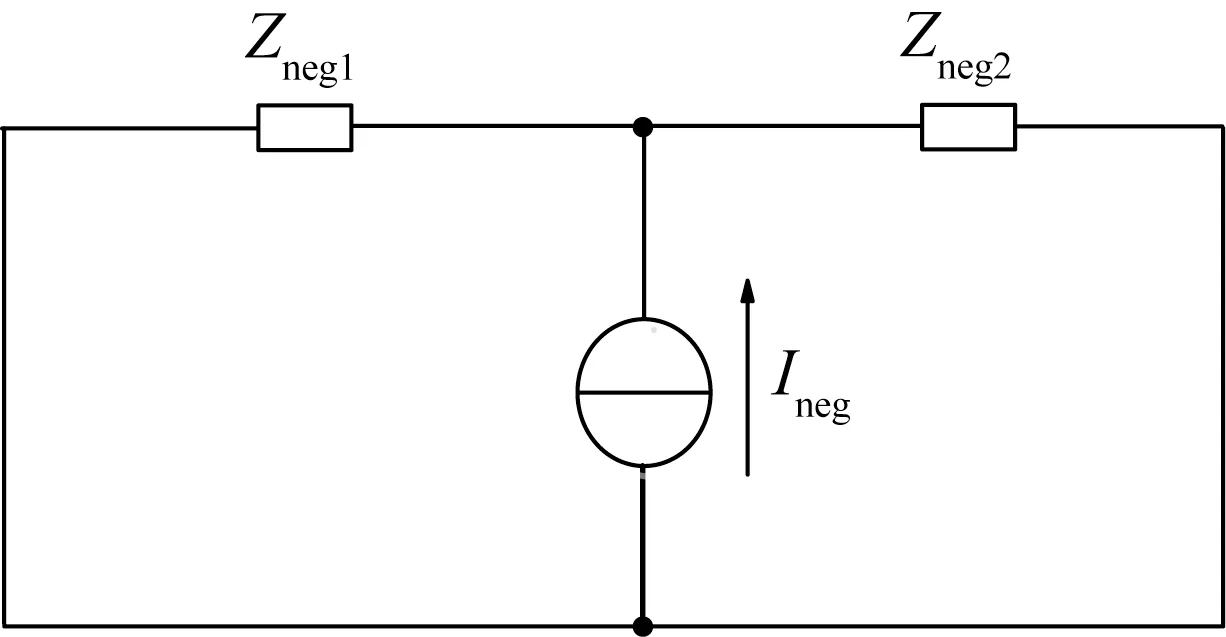
圖3 負(fù)序等效電路
由于三相三線制系統(tǒng)中無中性點(diǎn)接地,零序阻抗較大,零序電流可忽略不計(jì),故對不平衡負(fù)荷系統(tǒng)的零序等值電路不予考慮。當(dāng)逆變器單元所對應(yīng)的負(fù)序阻抗相同時,負(fù)序電流、功率可以得到合理分配。
對帶有不平衡負(fù)荷的三相系統(tǒng),其有效視在功率為

式中:Ue、Ie分別為電壓、電流的均方根值與分別為基波電壓、電流的正、負(fù)序分量。
式(5)中,第1項(xiàng)為逆變器輸出的正序功率,其余3項(xiàng)之和為負(fù)序功率,但由于負(fù)序等效電路中的值很小,可忽略不計(jì),則負(fù)序功率為

由此可知,實(shí)際系統(tǒng)中由于存在不平衡負(fù)荷,導(dǎo)致系統(tǒng)中出現(xiàn)負(fù)序功率和電流,因此構(gòu)建控制回路需分別進(jìn)行正、負(fù)序分量的控制。
2 電壓、電流信號提取方法
計(jì)算負(fù)序功率應(yīng)當(dāng)先精確提取電壓、電流的基波分量,然后計(jì)算電壓、電流的正、負(fù)序分量。本文通過廣義二階積分器及正、負(fù)序計(jì)算模塊,實(shí)現(xiàn)電壓、電流的正、負(fù)序分量提取,廣義二階積分器如圖4所示(以電流為例,電壓提取過程與其相同)[11]。圖中,iα、iβ分別為逆變器輸出電流的α、β分量;kd為帶寬系數(shù);ω為角頻率;1/s為積分系數(shù);為基頻下逆變器輸出電流的α、β分量;為的正交分量。

圖4 廣義二階積分器

由式(7)可知,廣義二階積分器相當(dāng)于帶通濾波器,只允許帶有特定頻率的信號通過,其對數(shù)幅頻特性曲線如圖5所示。

圖5 對數(shù)幅頻特性曲線
由圖5可知,基頻信號在基頻處幅值為1,相位為0,廣義二階積分器可精確提取所需信號且無時延,考慮到系統(tǒng)動態(tài)響應(yīng)與諧波的影響,取kd為
各頻率信號提取完成后,通過正、負(fù)序計(jì)算模塊得到電流的正、負(fù)序分量,實(shí)現(xiàn)不平衡功率的計(jì)算,電流正、負(fù)序分量計(jì)算模塊如圖6所示。圖中,分別為基波電流在α、β坐標(biāo)系下的正、負(fù)序分量。
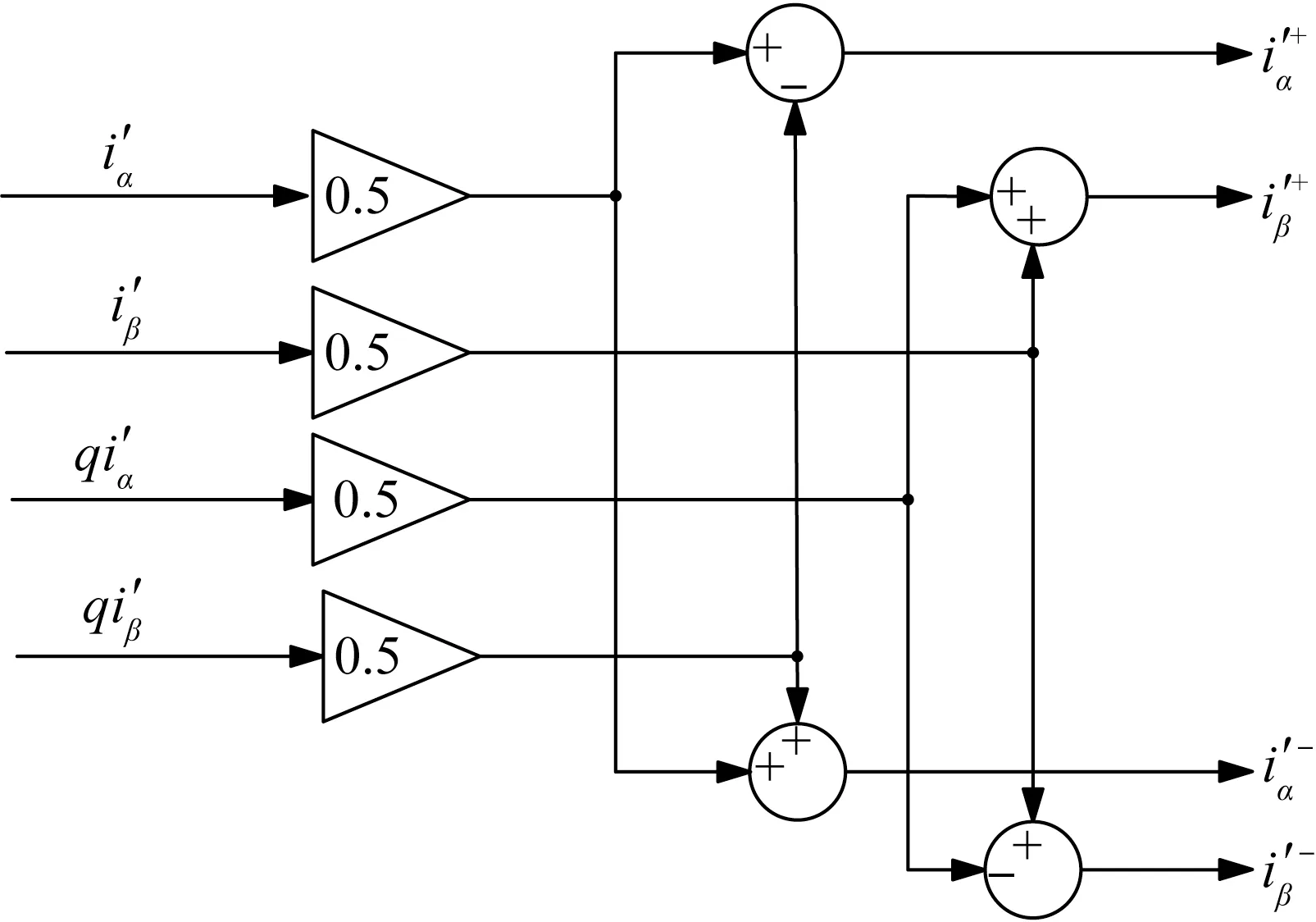
圖6 電流正、負(fù)序分量計(jì)算模塊
3 改進(jìn)控制策略
改進(jìn)控制策略控制框圖如圖7所示。圖中,uαβ、uαβ'+為逆變器輸出電壓的α、β分量、逆變器輸出正序基波電壓的α、β分量;P+、Q+為正序有功、無功功率;ωs為低通濾波器截止頻率;ud、uq為下垂控制參考電壓;Δud、Δuq為虛擬阻抗壓降;udref、uqref為電壓控制環(huán)的輸入信號;Qneg為負(fù)序功率。
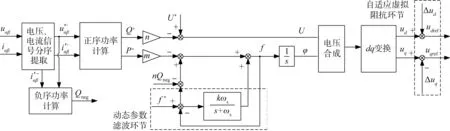
圖7 改進(jìn)控制策略控制框圖
采集逆變器輸出電壓、電流,提取正、負(fù)序電壓、電流,同時計(jì)算正序有功、無功功率、負(fù)序功率;將正序有功、無功功率用于下垂控制,利用動態(tài)參數(shù)濾波、自適應(yīng)虛擬阻抗,分別對頻率、電壓控制環(huán)進(jìn)行改進(jìn),得出改進(jìn)后的電壓向量;將電壓向量用于產(chǎn)生逆變器開關(guān)管的驅(qū)動信號。動態(tài)參數(shù)濾波、自適應(yīng)虛擬阻抗可表示為
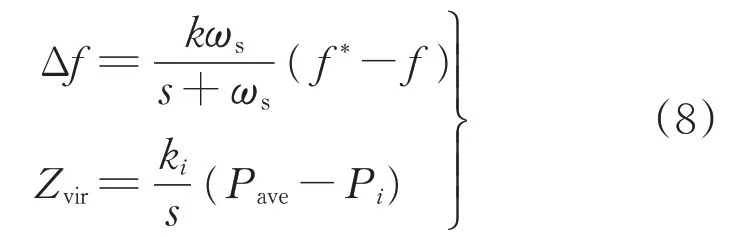
式中:Pave為參考有功功率;k為低通濾波系數(shù),其表達(dá)式為斜坡函數(shù);ki(i=1,2)為積分函數(shù)。
3.1 負(fù)序功率原理
改進(jìn)控制策略可表示為
式中:i=1,2;G為軟補(bǔ)償系數(shù),具體設(shè)置參見文獻(xiàn)[15]。
改進(jìn)控制策略主要分為以下兩個過程:
(1)通信預(yù)備過程。主要由微電網(wǎng)中央控制器與逆變器的本地控制器完成此項(xiàng)工作。在該過程中,逆變器的本地控制器實(shí)時采集逆變器輸出有功功率,并發(fā)送給微電網(wǎng)中央控制器,計(jì)算有功功率的參考值,同時微電網(wǎng)中央控制器肩負(fù)著發(fā)起啟動信號的功能,當(dāng)改進(jìn)控制過程啟動時,即為各逆變器提供補(bǔ)償信號與Pave值(此時Pave值為微電網(wǎng)中央控制器實(shí)時計(jì)算的最新值)。上述過程將在下垂控制中完成,為改進(jìn)控制策略作準(zhǔn)備。
(2)當(dāng)各逆變器的本地控制器接收到補(bǔ)償信號時,各逆變器控制部分同時動作,即對各逆變器的頻率控制環(huán)、電壓控制環(huán)分別增添負(fù)序功率擾動量與自適應(yīng)虛擬阻抗,穩(wěn)態(tài)時各逆變器的負(fù)序功率缺額將得到補(bǔ)償。
根據(jù)式(9),補(bǔ)償信號產(chǎn)生后,對于頻率控制環(huán),有

對于電壓控制環(huán),由于虛擬阻抗的作用,有

將式(10)、式(11)合并,則有

從虛擬阻抗的自適應(yīng)調(diào)節(jié)過程進(jìn)行分析。假設(shè)最初系統(tǒng)運(yùn)行在下垂控制模式,如式(2)所示。若逆變器1的線路阻抗小于逆變器2的線路阻抗,負(fù)序功率滿足

某一時刻,改進(jìn)控制策略實(shí)施時,結(jié)合式(10)、式(13),以等額定容量逆變器并聯(lián)系統(tǒng)為例,有

由于虛擬阻抗的自適應(yīng)調(diào)整,使得P+1增大,減小,最終滿足

結(jié)合式(9)中虛擬阻抗表達(dá)式可知,線路1阻抗變大,線路2阻抗變小,最終趨于相同,即滿足

負(fù)序功率可以得到合理分配。
3.2 動態(tài)參數(shù)濾波調(diào)節(jié)過程
上一節(jié)利用自適應(yīng)虛擬阻抗與負(fù)序功率的擾動量實(shí)現(xiàn)了負(fù)序功率的合理分配,但加入擾動量使系統(tǒng)頻率發(fā)生波動,影響系統(tǒng)穩(wěn)定性,應(yīng)做出合理調(diào)控。
改進(jìn)控制策略如式(9)中第1個表達(dá)式所示,將其化簡可得

可知,正序有功功率、負(fù)序功率均對系統(tǒng)的頻率造成波動。定義Δfa為系統(tǒng)頻率偏移量,則有
可繼續(xù)變換為
式中:ωp為瞬時正序有功功率、瞬時負(fù)序功率qnegi的低通濾波截止頻率。
動態(tài)參數(shù)濾波的加入給系統(tǒng)增添了一個額外的閉環(huán)極點(diǎn)。結(jié)合文獻(xiàn)[9]可知,k值增大可使系統(tǒng)頻率逼近額定值,但增大的同時使系統(tǒng)的動態(tài)調(diào)節(jié)性能變?nèi)酢R虼耍瑢值合理調(diào)控是必要的。由于自適應(yīng)虛擬阻抗與有功功率有關(guān),且通過調(diào)節(jié)自適應(yīng)虛擬阻抗系數(shù)可調(diào)控有功功率均分的速度,故k值主要對負(fù)序功率的調(diào)節(jié)速率影響較大。
通過上述分析可知,頻率偏移的大小與負(fù)序功率的調(diào)節(jié)速率是一對矛盾,而本文目標(biāo)是在實(shí)現(xiàn)頻率偏移量小的同時,加快負(fù)序功率的調(diào)節(jié)速率,因此需合理設(shè)計(jì)k值。
本文通過分段函數(shù)設(shè)置k值。第1階段:即負(fù)序功率調(diào)節(jié)階段,主要目標(biāo)為負(fù)序功率的快速調(diào)節(jié),對頻率抑制并沒有過高的要求,k值的表達(dá)式為斜率較小的一次函數(shù);第2階段:主要追求頻率的偏移抑制,對負(fù)序功率的調(diào)節(jié)速率沒有過高的要求,因?yàn)樨?fù)序功率的調(diào)節(jié)過程已在第1階段基本完成;第3階段:對第2階段末的k值進(jìn)行保持。k值函數(shù)示意圖如圖8所示。

圖8 k值函數(shù)示意圖
t1~t2為調(diào)節(jié)速率階段,t2~t3為頻率偏移抑制階段。本文設(shè)置
4 仿真分析
搭建如圖1所示的微電網(wǎng)結(jié)構(gòu)模型,參數(shù)設(shè)置如表1所示。

表1 參數(shù)設(shè)置
算例1 傳統(tǒng)下垂控制。傳統(tǒng)下垂控制中,系統(tǒng)頻率為全局變量,逆變器輸出有功功率可得到合理分配,如圖9(a)所示。各逆變器所對應(yīng)的阻抗不同,導(dǎo)致流經(jīng)線路的負(fù)序功率不能得到合理分配,如圖9(b)所示。
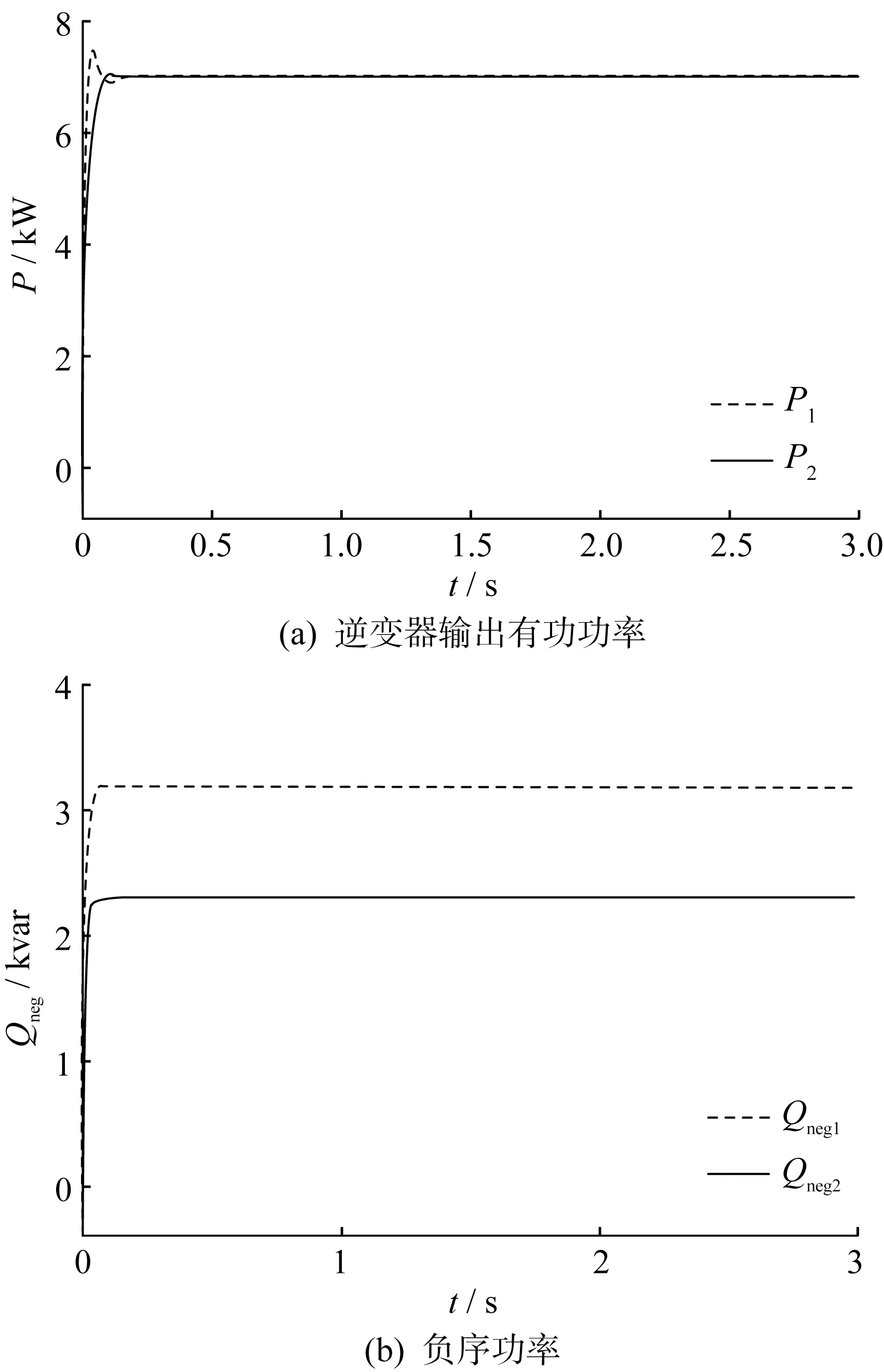
圖9 下垂控制
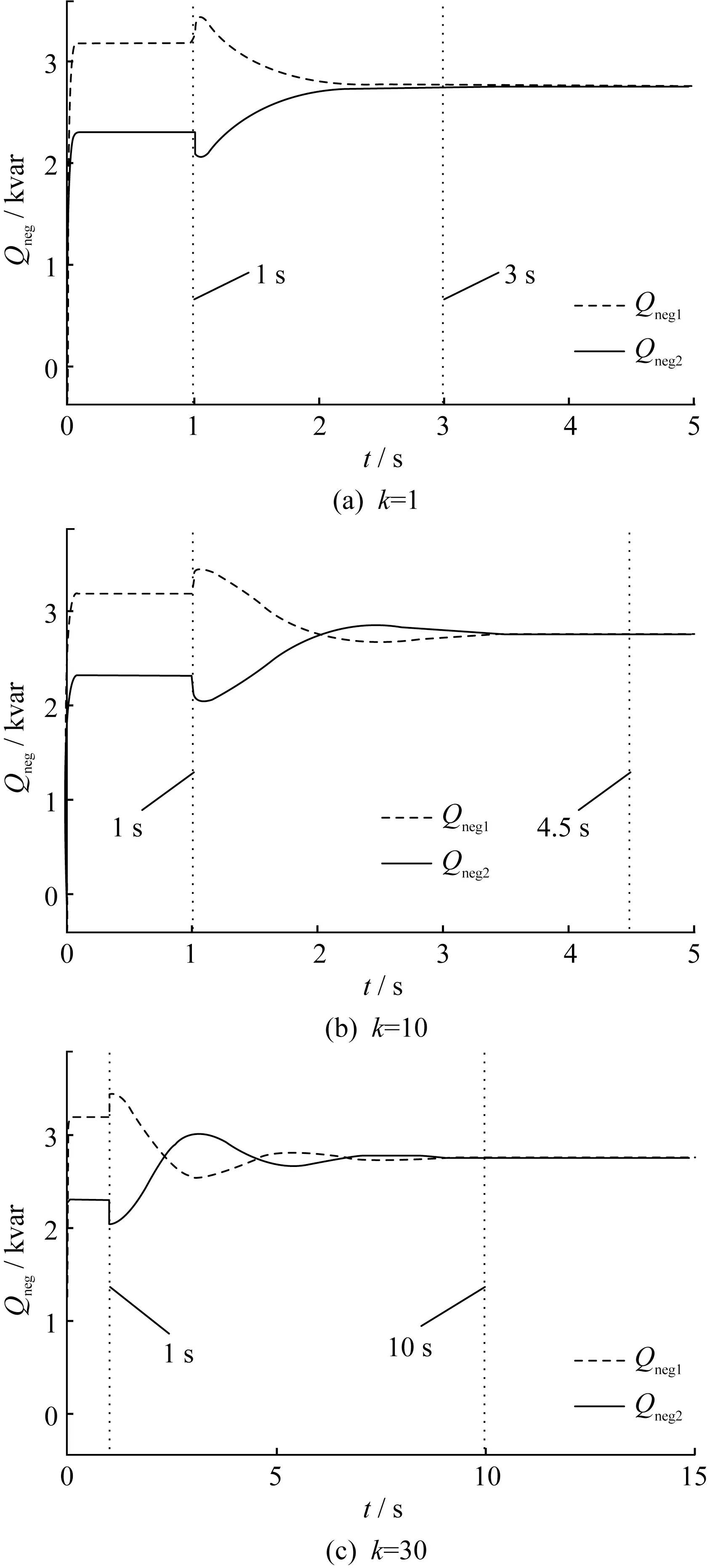
算例2 改進(jìn)控制策略。改進(jìn)控制策略的仿真實(shí)驗(yàn)結(jié)果如圖10所示。0~1 s為傳統(tǒng)下垂控制,1 s開始啟動改進(jìn)控制策略。1 s之前的過程,仿真算例1已說明。由式(13)可知,補(bǔ)償瞬間,由于Qneg1>Qneg2,且兩逆變器單元均滿足式(10),因此,有P+1 圖10 改進(jìn)控制策略仿真實(shí)驗(yàn) 算例3 負(fù)序功率動態(tài)性能比較。本算例的仿真設(shè)置過程與算例2相同。由3.2節(jié)可知,k值的設(shè)置對負(fù)序功率的調(diào)節(jié)速率有較大影響,本文通過一組對比實(shí)驗(yàn)驗(yàn)證3.2節(jié)的理論。 圖11為k=1、10、30的負(fù)序功率調(diào)節(jié)速率圖。當(dāng)k=1時,負(fù)序功率調(diào)節(jié)時間為2 s;當(dāng)k=10時,負(fù)序功率調(diào)節(jié)時間為3.5 s;當(dāng)k=30時,負(fù)序功率調(diào)節(jié)時間為9 s。通過對比可知,k值越大,負(fù)序功率的調(diào)節(jié)速率越慢,證明了本文3.2節(jié)的理論。 圖11 負(fù)序功率調(diào)節(jié)速率比較 本文著重剖析了負(fù)序功率不能得到合理分配的原因,并以此為主線,提出了改進(jìn)控制策略,解決了負(fù)序功率分配精度、頻率偏移、功率調(diào)節(jié)速率3個問題。具有優(yōu)化如下: (1)通過自適應(yīng)虛擬阻抗與負(fù)序功率擾動的方法,大大提高了負(fù)序功率合理分配的精度。 (2)針對頻率下垂控制本身的特性以及負(fù)序功率對系統(tǒng)頻率的擾動,權(quán)衡了頻率偏移與負(fù)序功率調(diào)節(jié)速率之間的矛盾。通過對k值的合理取值,在提高頻率質(zhì)量的同時,也加快了負(fù)序功率的調(diào)節(jié)速率。 (3)改進(jìn)控制策略也可應(yīng)用于阻性下垂控制。 綜上所述,本文改進(jìn)控制策略適用于逆變器并聯(lián)系統(tǒng)的負(fù)序功率、系統(tǒng)頻率的精確控制,并經(jīng)仿真實(shí)驗(yàn)證明了其有效性。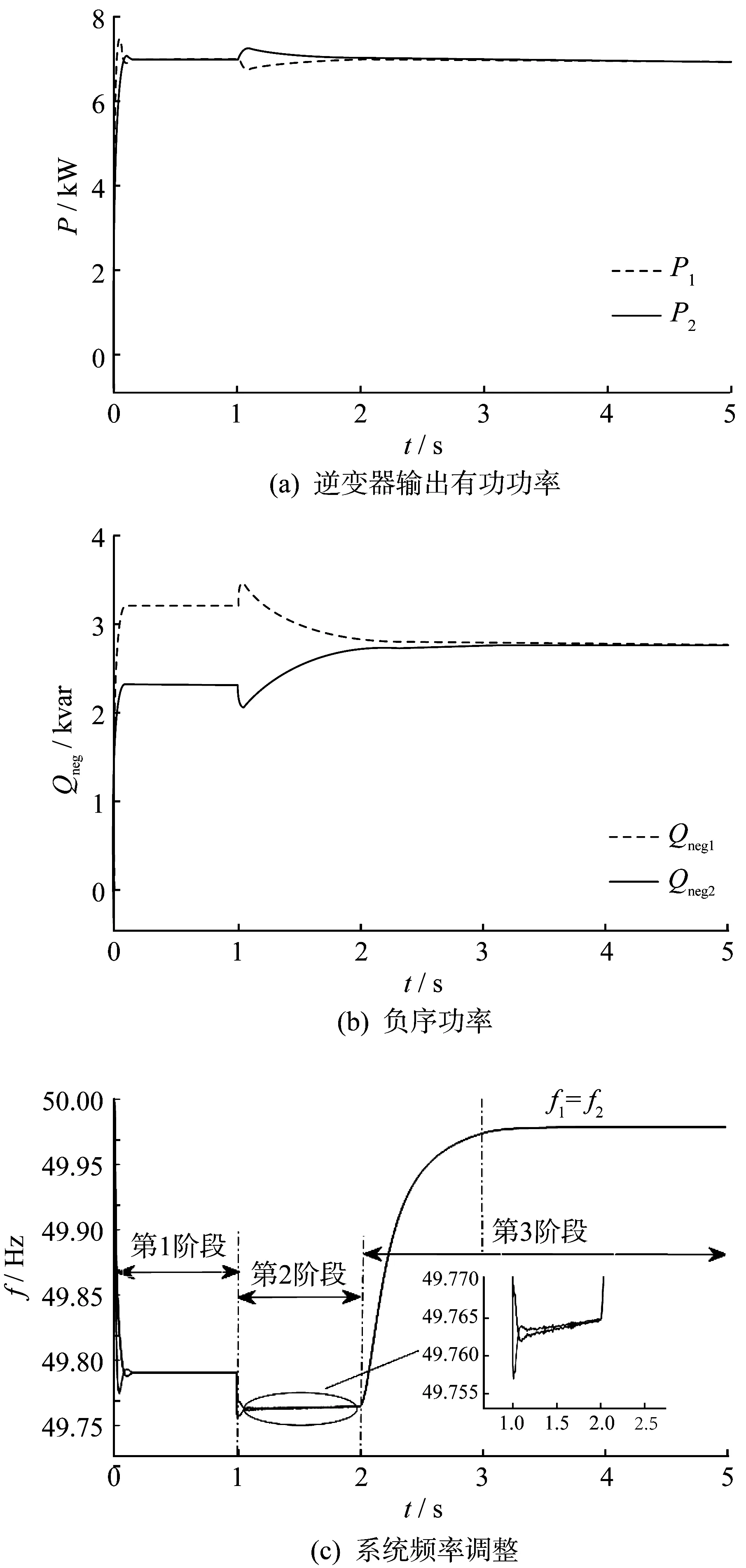
5 結(jié) 論
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
