基于一致性理論的衛星太陽能帆板分布式振動控制
2021-12-31 02:22:10周威亞鄔樹楠王恩美
南京航空航天大學學報 2021年6期
周威亞,鄔樹楠,王恩美
(大連理工大學航空航天學院,大連 116024)
隨著空間任務的復雜程度不斷提高,衛星太陽能帆板、星載天線等的結構尺寸逐漸朝著輕量化、大型化和模塊化的方向發展,呈現的柔性特征更為明顯。衛星在進行軌道機動或者姿態調整時會激發太陽能帆板的振動;此外,受到空間攝動的影響,帆板也可能產生撓性振動。振動發生后很難自行衰減,會對衛星本體的控制產生較大的影響。因此,需要對太陽能帆板進行主動振動控制。
近年來,國內外很多學者都針對空間柔性結構的振動控制問題開展了研究。Wang等[1]利用線性二次型調節控制器實現了對壓電智能梁結構的振動控制。Luo等[2]采用比例微分(Proportional derivative,PD)控制完成了大型桁架結構的振動控制。鐘美法等[3]在線性二次最優控制器的Riccati方程求解中引入精細積分法,并通過抑制壓電層合板的振動分析該方法的有效性。邱志成等[4]基于自適應RBF模糊神經網絡控制算法實現了對帶有鉸接的撓性附件的振動控制。袁秋帆等[5]以低基頻撓性附件為研究對象,基于正位置反饋控制原理,設計了太陽帆板振動控制系統。黃永安等[6]針對具有參數不確定性以及受到隨機擾動的柔性結構,將神經網絡與滑模控制結合,設計了神經網絡滑模振動控制方法。苗雙全等[7]提出了一種輸入成形與自適應滑模控制結合的控制算法,實現了對撓性航天器姿態機動過程中殘余振動的抑制。Hu等[8]以空間大型柔性懸臂結構的振動問題為研究背景,設計了自適應控制算法。余臻等[9]提出了一種基于期望補償的自適應魯棒主動控制方法,抑制了撓性航天器機動過程中撓性附件產生的振動。以上控制方案均屬于集中式控制,無論采用經典控制算法還是現代控制理論,都是將整個結構振動控制的信息一起存入一個中央控制器中處理。雖然能取得較好的控制效果,但系統對于控制器故障的魯棒性較差。此外控制器求解計算的效率會隨著自由度數量的增加而下降。隨著像空間太陽能發電衛星等新任務的出現,太陽能帆板的結構尺寸能夠達到數百米,需要數量眾多的傳感器和執行機構來完成控制任務,這會導致系統龐大且復雜[10-11]。
為了提高集中式控制器求解效率,常采用模態截斷來減小系統維數,但這也存在觀測溢出等問題。若能將太陽能帆板的振動控制系統“化整為零”分解為多個子系統并各自獨立控制,則不失為一條新的有效途徑。這即為分散式振動控制。與集中式振動控制相比,分散式控制將高維大系統分解成多個低維子系統,實現了對系統的降維。各分散振動控制器只需要帆板結構的局部信息而不需要全部信息,因此能夠降低信息處理量、提高求解計算效率。當某個子系統控制器出現故障時,不會影響其他控制器的正常工作,控制系統將更加可靠。此外,采用分散式控制使系統具備良好的擴展性,適用于大型帆板、天線等的在軌裝配。目前已有學者開展了相關的研究,Huang等[12]研究了分散化滑模控制方法,實現了大型撓性附件的振動控制。Hu等[13]將大型空間結構劃分成相互連接的子結構,設計了一種僅利用子結構局部反饋信息的簡單分散自適應控制方法,實現了大型空間結構的振動抑制。文獻[14-16]系統地介紹了大型空間結構的分散式控制策略。通過設計的分散化自適應模糊控制方法完成了空間智能桁架、空間薄膜結構的主動振動控制;通過設計的分散式魯棒控制策略實現了航天器太陽能電池板的主動振動控制,并通過實驗驗證了分散控制方法的有效性。上述分散式振動控制存在較多優勢,但設計各控制器時只使用帆板結構的局部信息,子結構之間的相互作用對系統全局性能的影響是通過調整各控制器的控制增益來處理的。這對處于物理上固定連接的太陽能帆板各子結構之間的相互作用影響而言是一種被動適應的方法。
在分散式控制器設計過程中進一步考慮子結構之間的信息交互,使子結構的受控運動能夠相互協同,則會優化全局控制效果并提高系統對故障的魯棒容錯能力。這種方法被稱為分布式控制或局部分散式控制[17-18]。Omidi等[19]基于模 態坐標提出了懸臂撓性板結構的分布式協同積分諧振控制方法,并給出了數值結果。相比沒有考慮協同交互的完全分散式控制,該方法表現出更好的控制效果。Sun等[20]設計了模態觀測器和分布式積分一致性控制器實現太陽能帆板的振動控制。王恩美等[21]基于有限元模型設計了結合卡爾曼濾波的分布式線性二次調節器(Linear quadratic regulator,LQR)振動控制器,在求解效果和魯棒容錯性能等方面通過數值仿真和集中式控制進行了對比分析。目前對于柔性空間結構的分布式主動振動控制方法的研究仍然處于起步階段,上述研究在控制系統的設計與理論分析上還存在不足。在分布式控制協同交互項的設計上沒有給出明確的協議或準則。此外,目前還缺乏對于部分控制器失效情況下的分布式振動控制的理論研究。
針對上述問題,本文提出基于一致性理論的衛星太陽能帆板分布式振動控制方法。根據智能組件的定義建立面向分布式控制的衛星太陽能帆板動力學模型;結合圖論和一致性理論設計分布式控制器,并對部分控制器失效的情況進行了理論分析。所設計的分布式振動控制器包含反饋鎮定項和一致性協同項,會顯著提高系統的動態性能和魯棒容錯能力。最后給出不同的算例仿真,驗證所提方法的有效性。
1 衛星太陽能帆板的動力學建模
以衛星太陽能帆板為研究對象,假設帆板由模塊化的單元結構組成,忽略之間的連接部件。本文假定帆板展開后為剛性鎖定,并認為在振動控制時衛星不作姿態機動。此時,可將帆板視作懸臂板結構進行動力學建模[22]。分布式控制思想是將整體系統分為多個分系統進行獨立控制,并通過各獨立控制器之間的信息交互實現整體系統的協同控制。因此,首先要建立衛星太陽能帆板的面向分布式控制的動力學模型。借鑒多智能體控制的思想,在考慮帆板模塊連接的基礎上,根據有限數量的敏感器和作動器將內在固結的太陽能帆板劃分為多個可獨立控制的子結構;各子結構之間視為鏈式連接且不包含重疊區域;每個子結構包含一個或多個模塊化的帆板單元結構,配置用于主動控制的敏感器、作動器和控制器;子結構中布置的作動器通過輸出力或者力矩來抑制帆板產生的振動。同時給出用于建立模型的Oxyz坐標系如圖1所示。這樣的子結構是基于分布式控制思想而提出的可控結構單元,具備獨立感知、計算和執行的能力,子結構之間是物理連接的,而非僅通信連接。文獻[23]中稱其為智能組件。

圖1 衛星太陽能帆板簡化模型Fig.1 Simplified model of satellite solar panel
根據上述定義,采用4節點板單元建立帆板結構的有限元模型。研究中通過理論計算得到單元結構的剛度陣、質量陣。通過組裝得到第i個智能組件的剛度陣和質量陣。考慮阻尼效應,帆板第i個智能組件的動力學方程可表示為

式中:xi為第i個智能組件的節點位移向量;Mi、Ci、Ki分別表示第i個智能組件的質量矩陣、阻尼矩陣和剛度矩陣,結構阻尼采用瑞利阻尼假設;Bi為第i個智能組件控制器的位置矩陣;ui為控制輸入。將得到的智能組件的質量陣、阻尼陣、剛度陣進行組裝可以得到整體結構的質量陣、阻尼陣、剛度陣。整體結構的動力學方程可表示為

式中:M、C、K分別表示太陽能帆板整體結構的質量矩陣、阻尼矩陣和剛度矩陣;X為整體結構的節點位移向量;B為整體結構控制器的位置矩陣;U為整體結構的控制輸入。
2 分布式振動控制系統設計
與分散控制的各自獨立工作相比,若各智能組件之間能相互協同則可以更有效地實現振動控制任務,而一致性算法則是分布式控制中的一種有效的協同機制。本節給出基于一致性理論的分布式振動控制系統設計過程及系統的穩定性分析。
2.1 控制器設計中的圖論基礎
在分布式振動控制系統中,采用圖論的基本理論來描述智能組件之間的連接關系,并在此基礎上設計各控制器中的一致性協同項[24]。圖是由頂點和連接頂點的邊所構成的集合,記為Γ={γ,φ,δ},其中γ={γ1,γ2,…,γn}表示所有頂點的集合,邊集φ?γ×γ表示連接各頂點的邊的集合。δ稱為鄰接關系矩陣

如果頂點j有一條邊指向頂點i,則有δij=1,否則δij=0,且認為頂點與自身不存在聯系。當δij=δji時,系統稱為無向圖;反之則為有向圖。
在航天器或機器人等編隊運動控制中,常將每個航天器或機器人當作一個頂點,用上述的拓撲圖來描述航天器或機器人之間的感知與通信連接關系。在本文的研究對象或其他大型空間結構中,各智能組件間存在結構上的連接。因此,可以認為其拓撲圖是固定的,是依據各智能組件上的連接關系確定的。這樣的設計是從結構特點的角度出發,而非僅考慮各控制節點的感知與通信關系。若為了提高閉環系統的魯棒性,則可以根據不同工況或任務改變拓撲圖以實現控制目標。
2.2 控制器設計中的一致性理論基礎
一致性是指通過設計合理的分布式控制協議,使得系統中的多個成員就某些關鍵的量趨于一致。一致性協議表示了系統中各個成員之間的信息傳遞和交換的過程。而這種信息交換則是分布式協同控制的中心問題。


2.3 分布式協同控制器設計
對于衛星太陽能帆板的分布式振動控制而言,采用多個作動器/傳感器進行主動控制時,保證不同位置的作動器輸出力之間的一致性十分重要。不同位置的作動器的輸出應該具有相位一致性,即同相位或者反相位,否則會相互影響導致控制效果變差。若將每個智能組件看作圖中的一個頂點,將不同組件的連接或通信關系當作邊,則帆板的各智能組件之間的關系可以被作為一個圖,以便于研究其分布式振動控制問題。依據帆板的結構特點,將各智能組件模塊之間連接關系的拓撲圖設為直線型的連通圖;同時考慮到帆板結構的敏感器和作動器多采用布線方式進行安裝,采用雙向通信對各智能組件的通信影響較小。因此,將文中的智能組件的控制器分為3種:(1)僅右端含有一致性協同信息的控制器;(2)左、右兩端均含有一致性協同信息的控制器;(3)僅左端含有一致性協同信息的控制器(圖2)。
根據上述定義,同時考慮到實際工程應用中采用測量信息進行控制器設計,本文將衛星太陽能帆板的分布式控制中的一致性協同控制器設計準則定義為

式中:yi和y?i表示智能組件狀態的測量信息;δa和δb分別表示位移和速度一致性項的鄰接關系矩陣。在此基礎上,提出分布式協同控制器為

式中:k12和kn,n-1分 別表示第1種 和第3種 智 能組件控制器中的增益,ki,i-1=ki,i+1(i=2,…,n-1)表示第2種智能組件控制器中的增益;u1和un分別表示帆板左端和右端的智能組件控制器;ui表示帆板中間智能組件控制器。則整體結構控制器可表示為



2.4 系統穩定性分析
為了分析系統的穩定性,選取如下所示的Lyapunov函數

式中M、K為正定矩陣。對V1求一階導可得

由式(2)可知

將式(11)代入式(10)可得

將控制器式(7)代入式(12)后可得
令增益滿足Kp=K*α-K*δ,則有

式中C為正定的結構阻尼矩陣,則只需令矩陣Kd+K*(δ-α)為半負定。因δ和α已知,Kd和K*為控制器的增益系數矩陣,令其均為對角陣,則存在可設計的參數kdi和k*i使得式(15)成立

式中:kdi為Kd的對角線元素;λi為矩陣δ-α的特征 值。因 此,矩 陣Kd+K*δ-K*α半 負 定,則<0,閉環系統漸近穩定,控制器中所有增益滿足上述設計約束條件即可。
2.5 控制器部分失效時的魯棒穩定性
分布式控制器式(7)包含反饋鎮定項和一致性協同項兩部分;當不考慮協同項時,則變為如下形式的分散式控制器

即僅根據每個智能組件的位移和速度來設計控制器,并不考慮不同組件間的交互關系。因此,也可以認為分布式控制器式(7)包含分散式控制器式(16)和一致性協同項兩部分。
采用式(16)所示的分散式控制器抑制太陽能帆板振動時,若某個或多個控制器失效則對應位置的控制力為0。這會影響控制效果,嚴重時可能無法實現對振動的有效抑制。而采用分布式控制器式(7)則能避免這個問題。這是由于控制器中還包含考慮不同智能組件信息交互的協同項,使得在某些分散式控制器失效的位置還會有控制力輸出。不妨假設式(7)中無反饋鎮定項(亦即分散式控制項輸出為0),則分布式控制器變為

選取如下Lyapunov函數

式 中M、K為 正 定 矩 陣。要 使V2>0,只 需XT(BK*αCy-BK*δCy)X≥0,即 矩 陣K*α-K*δ半正定。令

則 矩 陣K+BK*αCy-BK*δCy正 定,即V2>0。對V2求一階導可得

將式(11)代入式(20)中可得

將控制器式(17)代入式(21)可得

式(22)代入式(19)可以得到V?2<0。因此控制器部分失效時閉環系統漸近穩定,且需滿足上述控制器的設計條件。
注釋1如式(7)所示的分布式控制器包含反饋鎮定項和一致性協同項兩部分,其中反饋鎮定項的設計采用了有代表性的比例-微分控制;若將式(2)所示的動力學模型轉化成狀態空間形式,則亦可以采用最優LQR、模型預測控制(Model predictive control,MPC)等方法設計反饋鎮定項;而對于一致性協同項則也可以采用其他形式的一致性算法設計。
注釋2如式(22)所示,在不考慮阻尼的情況下,則可以重新選擇合適的控制參數K*以及重新定義智能組件的鄰接關系使得V?2<0。即在無阻尼時采用帶有一致性協同項的分布式控制仍能保證閉環系統的魯棒穩定性。
3 數值仿真
將本文提出的基于一致性理論的分布式協同控制方法用于衛星太陽能帆板的振動控制,并與分散式控制進行比較。設計不同情況的數值仿真算例,以驗證所提方法的有效性。
仿真中,假設衛星太陽能帆板的材料為鋁板,結構相關參數如表1所示;將整體結構劃分為4個智能組件,每個智能組件設置1個測量位置。智能組件之間的拓撲關系如圖3所示。
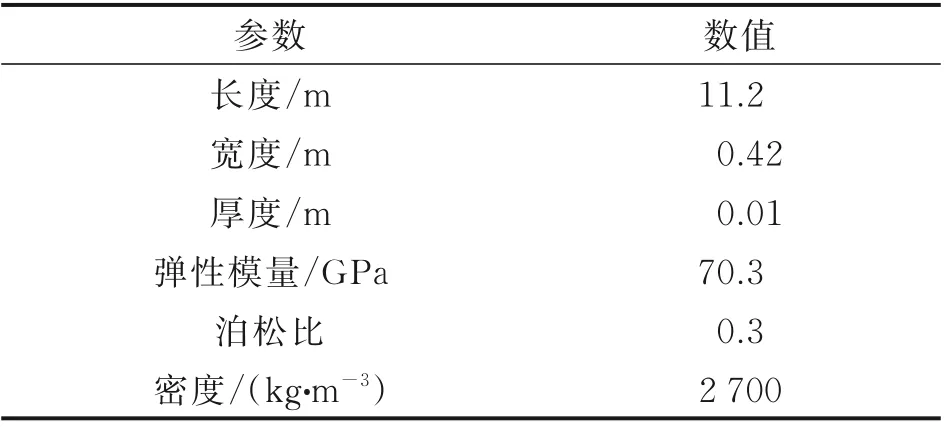
表1 衛星太陽能帆板的相關參數Table1 Parameters of satellite solar panel

圖3 衛星太陽能帆板控制器的內部信息拓撲Fig.3 Internal information topology of satellite solar panel controller
(1)算例1
分別在分布式控制器式(7)和忽略一致性協同項的分散式PD控制器式(16)作用下獲得控制效果。控制器增益系數由穩定性條件計算得到


其 中B1,B2,B3,B4分 別 表 示 每 個 智 能 組 件 控 制 器的位置矩陣;E表示單位陣,阻尼系數為0.01 。
首先,給定衛星太陽能帆板施加一個5N的作用力,使帆板產生初始靜態變形。這作為仿真的初始狀態。仿真結果如圖4~6所示。圖4(a,b)分別表示位置3控制前后的位移和速度變化曲線。采用分布式控制器式(7)和分散式控制器式(16)分別在約26s和50s實現了帆板95%的振動抑制效果。圖5(a,b)分別表示位置4控制前后的位移和速度變化曲線。采用分布式控制器和分散式控制器分別在約26s和50s實現帆板95%的振動抑制效果。圖6(a,b)分別給出了分散式控制和分布式控制作用下位置3和位置4的控制力變化曲線。通過對比可以看到在控制力幅值大小相似的情況下,分布式協同控制器由于不同作動器的輸出保持了相位一致性要比分散式控制器使得位移和速度收斂的更快;同時由于一致性項的作用,曲線也較為平滑,控制系統具有更好的動態性能。

圖4 控制前后位置3的位移和速度曲線Fig.4 Displacement and velocity curves of position3before and after control

圖5 控制前后位置4的位移和速度曲線Fig.5 Displacement and velocity curves of position4before and after control

圖6 分散控制力和分布式控制力Fig.6 Decentralized control force and distributed control force
(2)算例2

圖7(a,b)分別為第3個智能組件控制器反饋鎮定項失效時帆板在兩類控制器作用下的位移和速度變化曲線。采用分布式控制器式(7)和分散式控制器式(16)分別約在32s和67s實現了帆板95%的振動抑制效果。結果表明,當存在控制器失效的情況下,本文提出的分布式控制器與分散式控制相比,系統狀態收斂時間縮短了約35s。

圖7 控制器失效時控制前后的位移和速度曲線Fig.7 Displacement and velocity curves before and after controller fails
通過與算例1中的結果比較可知,當存在部分控制器失效的情況下,分散式控制效果發生了明顯的下降,穩定所需時間增加了約17s。當采用分布式控制時,由于控制器中協同項的存在,使得位置3處的控制力輸出不為0。因此,采用分布式控制依舊能夠使系統狀態在較短時間收斂,具備更好的魯棒容錯性能。
(3)算例3
假設系統不考慮阻尼作用,在算例2的基礎上進一步考慮多個分散式控制器失效的情況,以此驗證本文提出的分布式控制器較好的魯棒容錯能力。
假設第2個和第3個智能組件分散式控制器失效情況,亦即采用分布式控制器時,第2個和第3個智能組件控制器中無反饋鎮定項,但還存在協同項。圖8(a)為2種控制器作用下位置4的位移曲線。如圖所示,在多個控制器失效的情況下,采用分散式控制的位移曲線出現了密集的震蕩。當假設全部分散式控制器失效,而采用分布式控制器式(7)時還存在一致性協同項,結果如圖8(b)所示。在無阻尼且全部控制器失效的情況下,分散式控制器失去了對衛星太陽能帆板的振動抑制;但是本文提出的分布式控制器仍然可以對帆板起到振動抑制的作用。雖然全部反饋鎮定項失效,但由于一致性協同項的存在,依然可以通過各組件之間的信息協調使得控制器的輸出不為0,從而實現衛星太陽能帆板的振動控制。這表明基于一致性理論的分布式振動控制具有很強的魯棒容錯能力。

圖8 控制器失效時控制前后的位移曲線Fig.8 Displacement curves before and after controller fails
4 結 論
針對衛星太陽能帆板的振動控制問題,本文建立了面向分布式控制的動力學模型,提出了基于一致性理論的分布式振動控制方法,給出了穩定性的分析過程,并設計了不同算例驗證所提控制方法的有效性和容錯性。
研究結果表明:(1)所提出的分布式控制方法通過各智能組件的獨立控制以及智能組件之間的協同可以實現帆板整體結構的振動控制,且具備良好的可行性。(2)基于一致性理論的分布式控制器能夠明顯提高閉環系統的動態性能,系統狀態收斂得更快,曲線也較為平滑。這主要是分布式控制器中一致性協同項對系統動態性能的改善。(3)所提出的分布式控制器表現出較好的魯棒容錯性能,部分控制器失效后依然能夠借助一致性協同項實現振動控制,保證閉環系統穩定。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
天天愛科學(2020年6期)2020-09-10 07:22:44
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
數學物理學報(2017年6期)2018-01-22 02:26:40