基于非對稱理論的微觀駕駛員行為特征分析
2022-01-06 06:34:44劉華磊謝振友林初染龍朝黨
黑龍江交通科技 2021年12期
劉華磊,謝振友,林初染,龍朝黨
(桂林電子科技大學,廣西 桂林 541004)
0 前 言
近年來人們對交通行為的非對稱性特征進行了研究,以解釋微觀交通流的不穩定性。即駕駛員在經歷遲滯影響后的駕駛行為振蕩和換道通常與以前不同。Yeo和Skabardonis分析了擁堵期間單個車輛的運動軌跡,發現了駕駛行為的異質性特征,但未研究操作不當和駕駛行為改變過程之間的關系。以及不對稱性與駕駛類別之間的機理關系還不是很清楚。Laval和Leclercq將交通振蕩的形成和傳播建立了模型,并認為是由于駕駛員的激進或保守行為引起的。但是該模型中假設的行為模型仍缺少實例數據驗證。Zheng等人利用小波變換方法對車輛軌跡進行分析,通過對換道行為的研究,展示了駕駛員的激進和保守駕駛行為特征。他們證明了換道會改變駕駛員行駛特征(改變可能是暫時的)。但是他們的主要是對駕駛員在換道時行為特征的比較,而且沒有實證數據支撐研究車輛換道前后有不同駕駛員行為特征的分布。Chen等人通過分析NGSIM中的車輛軌跡,提出了一種非對稱行為模型來捕捉擁擠交通條件下駕駛員的行為。該模型為研究非對稱駕駛行為提供了一種很好的方法。但是他們只關注振蕩前駕駛員特性的分布,而沒有實證數據展示振蕩后駕駛員特性的分布以及駕駛員特性變化的結果。盛鵬等人利用元胞自動機模型描述了不對稱換道和瓶頸搶道行為產生的復雜交通現象。
國內外研究普遍認為換道行為駕駛員的行為特征會誘發擾動和促使擁堵波傳播,即駕駛員的行為特征會影響交通流,而交通流狀態的改變同樣會對駕駛員的駕駛行為造成影響,但對于具體的關聯性卻沒有一個統一的結論,仍然需要更多的研究來證實。
基于Chen等人的非對稱理論,研究了換道前后駕駛員特征的分布和變化不同,以及其轉化過程,從換道行為方面分析了振蕩時駕駛員特征的非均勻分布和反應模式。
1 數據來源及處理
本文的研究數據來源于www.seutraffic.com網站公開的數據集,研究對象是南京雙橋門城市高架高速公路中的瓶頸路段。本文只研究圖片下方的車道(虛線矩形內),這是一個入口匝道瓶頸,如圖1所示。

圖1 無人機視頻上的一幀,研究的路段(黃色虛線框)和被識別跟蹤車輛(紅色虛線框)
數據采集上,本文使用無人機來拍攝視野更廣、鳥瞰視野更通暢的空中視頻。然后從視頻中提取被測路段上所有車輛的軌跡數據,實現交通流的完整時空重構。采集到的視頻是通過圖像識別與跟蹤技術進行軌跡提取,技術流程如圖2所示。每個車輛樣本包括瞬時加速度或減速度、速度、縱向和橫向位置以及換道時的準確位置等信息,獲得高準確率微觀的車輛軌跡數據。

圖2 圖像識別與軌跡提取流程圖
2 非對稱模型基本原理

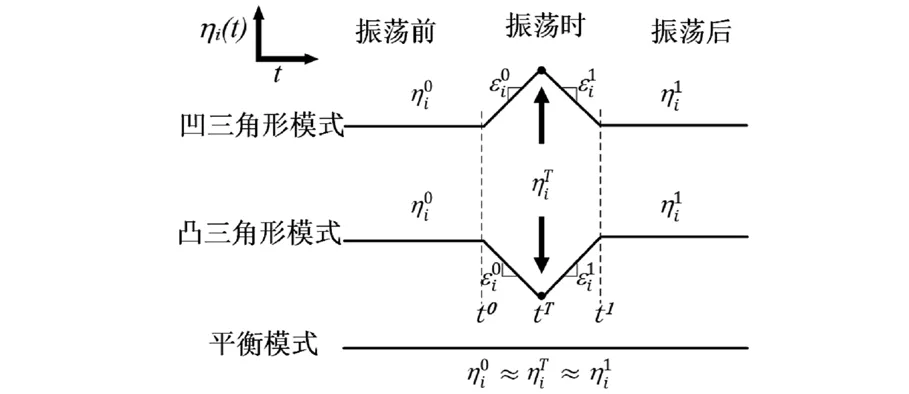
圖3 振蕩過程中的行為模式變化,即ηi(t)的演化


在非平衡前
(1)
在平衡時
(2)
平衡后
(3)

圖4本文的數據中換道行為的數據實例,虛線表示不插入換道車輛的后車的理想軌跡,以及被換道車輛改變后的理論軌跡(τ,-τw)
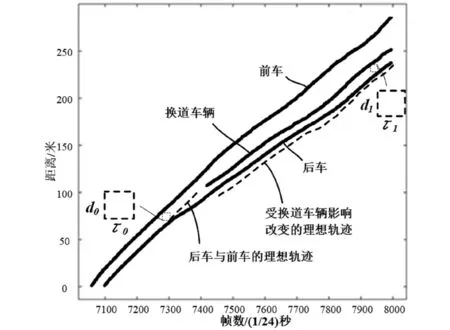
圖4
3 研究分析與結果
以往研究的觀察,換道過程通常持續5秒以上。利用NGSIM車輛軌跡,Zheng等人發現開始(t0~tT)和結束(tT~t1)過程的平均時間周期分別為8~14 s和10~15 s。
本研究的換道抽樣標準為:前車和后車的軌跡時間周期大于40 s(>35 s,即開始和結束),換道車輛插入后的軌跡時間周期大于30 s(大于上述結束周期)。本文分析的一個經驗換道樣本如圖4所示。總共分析了61組(每三輛車組成一組,即前車、換道車和后車)。


圖5 后車駕駛員特征變化與平均駕駛行為的偏差
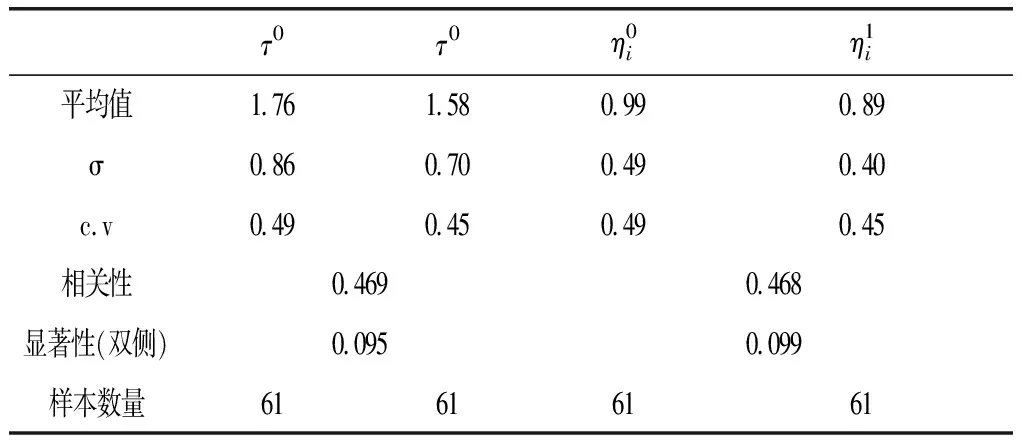
表1 車道變換前后參數配對t檢驗的統計描述

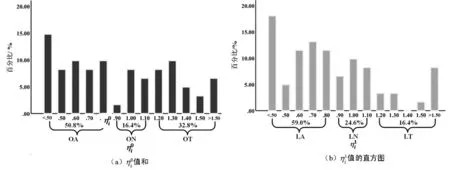
圖6 車道變換中的行為分類統計
4 結 論

(1)駕駛員在交通擁擠中表現出顯著的異質性。駕駛員在平衡狀態下的特性在一定程度上決定了其對交通振蕩的反應方式。因此,由于駕駛員的異質性,由駕駛行為引起的交通振蕩的形成和傳播似乎是不可避免的,這是駕駛員的本質特征。這意味著與駕駛行為相關的振蕩誘發將成為駕駛員控制和管理研究的重點。
(2)展示了中國駕駛員的一些典型特征,如道路上駕駛員類別的兩極分化比較明顯,激進駕駛員比例較高。這個為交通安全駕駛行為研究提供可靠的數據支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
